嵍: L2C柍岠 (L1CA+L2P(Y))丄塃: L2C桳岠 (L1CA+L2C)
|
擔婰丒旛峫榐 |
2006 | 2007/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2008 |
| July | August 2007 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
September | Home |
..................................................................................................................................
偄偔偮偐偺婔壗妛嫍棧寁嶼傾儖僑儕僘儉偺惛搙昡壙寢壥儊儌丅GPS僔儞億尨峞梡偵丄揹巕婎弨揰0759偺2005/4/2 24H暘偺僨乕僞傪巊偭偰昡壙偟偨丅尨棟揑偵嵟傕惛搙偑椙偄偲巚傢傟傞(0)傪婎弨偲偟偨岆嵎丅(曗懌: 寢嬊偙傟傜偼8/28偵彂偄偨Sagnac岠壥曗惓朄偺嵎傪昞偟偰偄傞丅9/1捛婰)
| 曽幃 | (1) | (2) | (3) | (4) |
| RMS | 0.020 mm | 0.029 mm | 0.061 mm | 0.299 mm |
| 僶僀傾僗 | -0.001 mm | 0.001 mm | -0.056 mm | 0.272 mm |
奺傾儖僑儕僘儉偺matlab昞尰偼埲壓偺捠傝丅
側偍丄憲庴怣帪崗傪ts,tr (sec)丄憲庴怣埵抲傪rs,rr
(m) (憲庴怣帪ECEF)丄憲庴怣帪崗偵偍偗傞ECEF仺ECI曄姺峴楍傪Us,Ur丄C=299792458丄OMGE=7.2921151467E-5偲偟偰偄傞丅ECEF仺ECI曄姺峴楍偼丄IAU1976/1980嵨嵎/復摦+IERS
Bulletin B偱寁嶼 (IERS Conventions 1996)丅(2)(4)偼拃師嬤帡偱廂懇偝偣偰偄傞丅
幚偼崅懍壔偺偨傔RTKLIB偼(4)傪嵦梡偟偨偺偩偑偁傑傝惛搙偑椙偔側偄丅婔偮偐偺棟桼偱(1)偼偁傑傝巊偄偨偔側偄偺偱丄傗偼傝(2)偵栠偡偐丄崅懍側(3)+僶僀傾僗崁曗惓偵曄峏偟偨曽偑椙偝偦偆偩丅
(曗懌: 埲忋偺條偵岆嵎偼傎傏negligible側偺偱偦傟傎偳偙偩傢傞昁梫傕側偄丅側偍丄DGPS傗RTK偱惗娤應検偱偼側偔娤應曗惓検傪憲怣偡傞応崌丄婎弨嬊偲儘乕僶偱堎側偭偨曗惓曽朄傪庢傞偲偦偺嵎偑岆嵎偲偟偰尰傟傞丅偦偺偨傔RTCM
v.2.3偱偼埲忋偺偆偪(2)傑偨偼(3)傪巊偆傛偆巜掕偑偁傞丅Appendix
C.2.1丄9/1捛婰)
..................................................................................................................................
IS-GPS-200傪撉傫偱偄偰丄Block IIR-M偺L2P(Y) 憲怣揹椡偑丄IIA/IIR偵斾妑偟3dB憹偊偰偄偰丄L1P(Y)偲摨偠偵側偭偰偄傞偙偲偵婥偑晅偄偨
(壓婰)丅L2C偼L2P(Y)傛傝峏偵1.5dB嫮偄丅Block
IIR-M偺怣崋庴怣嫮搙(C/N0)偑崅偄偺偼偙傟偑尨場偩偭偨偲偄偆偙偲丅偮偄偱側偺偱Block
IIF傑偱偺柉惗怣崋偺怣崋嫮搙傪傑偲傔偰偍偔丅(L1C偼傑偩preliminary側抣,
L1Cp偲偐L1CD偲偄偆偺傕偁傞偺偩偑偙傟偼側傫偩傠偆丅)
(曗懌: 娫堘偊偨丅L1C偼Block III偐傜偩偭偨丅偱傕QZSS偵偼L1C傪嵹偣傞傜偟偄丅15:53)
| SV Blocks | Signal | |||||
| L1 C/A | L1C | L2C | L1 P(Y) | L2 P(Y) | L5 (I5/Q5) | |
| II/IIA/IIR | -158.5dBW | - | - | -161.5dBW | -164.5dBW | - |
| IIR-M | -158.5dBW | - | -160.0dBW | -161.5dBW | -161.5dBW | - |
| IIF | -158.5dBW | -160.0dBW | -161.5dBW | -161.5dBW | -157.9dBW | |
..................................................................................................................................
C.Audoin & B.Guinot, The Measurement of Time: Time, Frequency
and the Atomic Clock, Cambridge University Press, 2001
帪崗掕媊丄帪崗寁應丄媦傃尨巕帪寁偵娭偡傞桪傟偨夝愢彂丅崱傑偱帪崗偵娭偟偰偼偁偊偰偁傫傑傝撍偭崬傑側偄偱偄偨偺偩偑抜乆偲偦偆傕峴偐側偔側偭偰偒偨偺偱丄婎杮揑側抦幆傪摼傞偨傔儁乕僷乕僶僢僋斉傪峸擖丅尨彂偼僼儔儞僗岅偱偦偺塸栿斉偺條偩丅GPS夝愅傪尩枾偵傗傠偆偲偡傞偲帪崗偺栤戣偼旔偗偰捠傟側偄丅嶐擔彂偄偨憡懳榑岠壥偺栤戣傕偦偺堦偮丅應埵塹惎僔僗僥儉帪崗嵎偺栤戣傕懡GNSS夝愅傪傗傞応崌偵偼廳梫偵側傞丅ITRF傕偦偆偩偑丄UTC偑偳偆偄偆僾儘僙僗偱寛掕偝傟偰偄傞偐傕寢峔柺敀偄偲偙傠偱偁傞丅
嶐擔彂偄偨憡懳榑岠壥偺偆偪Shapiro time delay偺庢埖偄偵偮偄偰偺曗懌丅
Blue Book偺Ashby偺夝愢傪傛偔尒傞偲丄帪崗宯偲偟偰抧昞忋帪宯傪偲傞偲Shapiro
time delay偼time scale change偵傛傞曗惓崁偲憡嶦偝傟偰丄傎傏negligible偲側傞偲偁傞 (2mm埲壓)丅幚偼Hofmann-Wellenhof
(2001) 傗Xu (2003) )偱偼偙偺Shapiro time
delay傪柧帵揑偵曗惓偡傞傛偆側婰弎偑偁傝丄怘偄堘偄偑偁傞丅偙偙偼昁偢偟傕摑堦偟偨尒夝偼側偄偺偐傕偟傟側偄丅偨偩偟尰嵼偺偲偙傠丄偙傟傜曗惓偺桳柍偑栤戣偲側傞偺偼PPP偺応崌偟偐側偄丅廬偭偰PPP偱巊偆惛枾帪寁嶼弌帪偺庢埖偄偵崌傢偣傞偺偑懨摉偱偁傞偲巚傢傟傞丅椺偊偽IGS偺Convention偱偼憡懳榑偺曗惓偼婳摴廃婜崁
-2 Xs丒Ys/c^2偟偐婯掕偟偰偄側偄偺偱 (Kouba 2003嶲徠) Shapiro time delay傪娷傔憡懳榑岠壥
secondary崁偺曗惓偼慡晹昁梫側偄偲巚傢傟傞
(Sagnac岠壥偼彍偔)丅
幚偼丄GT0.6.3偱偼Hofman-Wellnhof偵廬偄Shapiro
time delay偺憡懳榑曗惓傪擖傟偰偄傞丅偙偺崁偼傎傏塹惎嬄妏偵偺傒埶懚偡傞偺偱曗惓偺桳柍偵傛傝庡偵應埵夝悅捈惉暘偵悢mm偺嵎傪惗偠傞偼偢偱偁傞丅師斉偱偼偙傟偼嶍彍偟偨傎偆偑傛偄偐傕偟傟側偄丅
..................................................................................................................................
N.Ashby, Relativity in the Global Positioning System, 2007
懡暘慜偵揬偭偰偄傞偼偢偩偑嵟嬤峏怴偝傟偨條側偺偱嵞搙揬偭偰偍偔丅GPS偵偍偗傞憡懳榑岠壥偺庢埖偄丅尨峞嶌惉梡偵Sagnac岠壥傪挷傋偰偄偰傑偨撍偒摉偨偭偨丅惵杮
(B.W.Parkinson et al., ed., Global Positioning
Theory and Application, AIAA, 1996) 偵傕摨偠昅幰偺彂偄偨憡懳榑偺夝愢偑娷傑傟偰偄傞偑丄慡斒偵擄夝偱側偐側偐姰慡偵棟夝偡傞偺偼擄偟偄丅
偝偰丄GPS偵偍偗傞憡懳榑岠壥偼丄(1) 堦斒憡懳榑偵傛傞塹惎帪寁偺恑傒丄(2)
摿庩憡懳榑偵傛傞塹惎帪寁偺抶傟丄(3) (夞揮嵗昗宯偱偁傞)
抧媴屌掕嵗昗宯偱婰弎偟偨応崌偺揹攇揱斃宱楬偺怢傃傑偨偼弅傒丄(4)
偦偺懠丄偐傜側傞丅
(1)偺戝偒偝偼廳椡億僥儞僔儍儖偱丄(2)偺戝偒偝偼塹惎懍搙偱寛傑傞偐傜丄抧媴傪幙揰偲傒側偟偐偮塹惎偑姰慡側墌婳摴偺応崌偼堦掕抣偲側傞丅僲儈僫儖婳摴崅搙偵偍偗傞(1)(2)偺憡懳榑岠壥偼婛偵塹惎帪寁偺廃攇悢僆僼僙僢僩偲偟偰峫椂偝傟偰偄傞丅偨偩偟幚嵺偺GPS塹惎婳摴偺棧怱棪偼0偱側偄偨傔丄塹惎偺抧媴廃夞偵摨婜偟偰偙偺戝偒偝偼廃婜曄摦偡傞丅廬偭偰丄偙偺曄摦偼塹惎帪寁僶僀傾僗寁嶼帪偵憡懳榑曗惓崁儮tr偲偟偰曗惓偡傞丅傑偨塹惎崅搙偑僲儈僫儖崅搙偐傜偢傟傞偙偲偵傛傝丄摨條偵塹惎帪寁僪儕僼僩偑敪惗偡傞偑丄偙傟偼塹惎帪寁僷儔儊乕僞
(偺僪儕僼僩崁) 偵娷傔傜傟偰曗惓偝傟傞丅側偍
(2) 偼2nd-order Doppler effect (傑偨偼墶僪僢僾儔乕岠壥) 偲傕屇偽傟傞丅
(3) 偼Sagnac岠壥偲屇偽傟傞丅偙傟偼昁偢偟傕摑堦偺偲傟偨曗惓曽朄偑偁傞傢偗偱偼側偄丅偙傟偵偮偄偰偼暿搑専摙偡傞丅
(4) 偵偼揹攇偑廳椡応傪揱斃偡傞嵺偺抶墑岠壥
(Shapiro time delay偲屇偽傟傞)丄Lense-Thirring
Drag (撪梕傛偔暘偐傜側偄偑GPS偱偼傎偲傫偳negligible傜偟偄)丄spatial
curvature effects (?)丄懢梲丒寧摍丄懠揤懱偺廳椡岠壥
(偙傟偼negligible)丄庴怣婡帪寁偵懳偡傞Sagnac岠壥
(?)丄摍 偑偁傞丅(4)偺嵟弶偺崁偼嵟戝2cm埵偵側傞偺偱惛枾應埵惛搙偱偼柍帇偱偒側偄丅偙傟偼扨撈應埵偱偼曗惓傪擖傟偨曽偑傛偄偑柍帇偡傞偙偲傕懡偄條偩丅
(憡懳應埵偱偼擇廳嵎偱傎傏憡嶦偝傟傞)丅(曗懌: Shapiro delay曗惓偺庢埖偄偵偮偄偰偼8/29偵曗懌忣曬傪捛壛偟偨丅8/29)
忋偲偼暿審偱GPS應埵傾儖僑儕僘儉偵娭偡傞尋媶僥乕儅傪巚偄偮偄偨丅懡暘悽奅揑偵傕偁傫傑傝傗傜傟偰偄側偄偲巚偆丅妛惗偝傫丄扤偐傗傝傑偣傫丅
GPS扨撈應埵偱偼庴怣婡帪寁僶僀傾僗偺帪娫憡娭偑側偄傕偺偲偟偰應埵夝傪媮傔傞偺偑晛捠偱偁傞丅偡側傢偪庴怣婡帪寁僶僀傾僗偼僄億僢僋枅偵撈棫偺枹抦僷儔儊乕僞偲偟偰悇掕偡傞丅偟偐偟丄庴怣婡帪寁僶僀傾僗偼偁傞掱搙偺帪娫憡娭傪壖掕偱偒丄偙偺帪娫憡娭傪應埵傾儖僑儕僘儉偵斀塮偡傞偙偲偵傛傝丄摿偵忦審偺埆偄堏摦懱摍偺應埵偱惛搙岦忋偑婜懸偱偒傞丅庴怣婡帪寁曄摦偼丄庴怣婡偺廃攇悢婎弨傗帪寁僗僥傾儕儞僌傾儖僑儕僘儉偵埶懚偡傞偺偱丄庴怣婡偵傛偭偰條憡偑戝偒偔堎側傞偙偲偑梊憐偝傟傞丅廬偭偰丄嵟弶偵婔偮偐偺庴怣婡偵偮偄偰偙傟傜偺帪寁曄摦傪惛枾寁應偟 (斃憲攇埵憡傪弌椡偱偒傞側傜偙偺寁應偼梕堈)丄偦偺摿惈傪昡壙偡傞丅師偵寁應偟偨摿惈傪巊偭偰庴怣婡帪寁曄摦悇掕丒梊應婡擻傪扨撈應埵傾儖僑儕僘儉偵摫擖偟丄偦偺岠壥傪妋偐傔傞丅堦斒偵庴怣婡偵巊傢傟傞悈徎敪怳巕偼抁婜埨掕搙偼埆偔側偄偑廃攇悢僆僼僙僢僩傗挿婜僪儕僼僩偑戝偒偄偺偱丄偙傟傜學悢傪帪掕悢挿傔偺僇儖儅儞僼傿儖僞偱悇掕偡傞偺偑椙偄偩傠偆丅庴怣婡偵傛偭偰偼帪寁旘傃偑偁傞偺偱偙傟傪専弌偟曗惓偡傞婡擻傕昁梫偵側傞偐傕偟傟側偄丅
..................................................................................................................................
偝偡偑偵傗偽偔側偭偰偒偨偺偱丄GPS僔儞億梡尨峞嶌惉丅偲傝偁偊偢RTK-GPS偺婎慴傪傑偲傔傞丅
..................................................................................................................................
Global Positioining System (GPS) Standard
Positioning Service (SPS) Performance Analysis
Report, 2007 (PDF 1.1MB)
2007擭2Q (4乣7寧) 偺GPS SPS (L1 C/A偵傛傞扨撈應埵)
惈擻昡壙丅FAA (Federal Aviation Administration)
William J. Hughes Technical Center偺 WAAS
Test Team偵傛傞儗億乕僩丅夁嫀儗億乕僩偺傾乕僇僀僽(1999乣)丄WAAS儕傾儖僞僀儉僗僥乕僞僗摍偼WAAS Test Team偺Web僒僀僩偐傜摼傜傟傞丅
5.1偵應埵惛搙昡壙偑偁傞丅悈暯2.0乣3.5m, 悅捈4.0乣4.9m
(95%抣)丅偙傟偼塹惎壜帇忦審偺椙偄掕揰偱崅惈擻庴怣婡/傾儞僥僫傪巊偭偨寢壥偩偑丄帺暘偱昡壙偟偰偄傞寢壥偲姶妎揑偵偼戝懱崌偭偰偄傞丅扨撈應埵梡揹棧憌儌僨儖
(Klobuchar) 偱偼50%掱搙偟偐揹棧憌抶墑傪曗惓偱偒側偄偲尵傢傟偰偄傞偐傜丄彮偟惛搙偑椙偡偓傞婥偑偡傞偺偩偑偙傟偼尰嵼懢梲妶摦惷壐婜偱偁傞偙偲偑岠偄偰偄傞偺偐傕偟傟側偄丅側偍SA
off 捈屻 (2000/5) 偺儗億乕僩傪尒傞偲SPS惛搙偼悈暯5.7乣6.7m,
悅捈7.5乣11.2m (95%抣) 側偺偱丄尰嵼傑偱偵奣偹攞埵惛搙偑岦忋偟偰偄傞偙偲偑傢偐傞丅
..................................................................................................................................
側傫偐枅擭偺偙偲偩偑丄7丄8寧偼慡慠巇帠偑恑傑側偄丅偄偭偨偄偙偺2儢寧壗傪偟偰偄偨偺偩傠偆丅偱傕傗偭偲彮偟椓偟偔側偭偰偒偨偺偱彮偟杮奿揑偵師偺僗僥僢僾偵恑傔偨偄丅
half-cycle ambiguity偵偮偄偰彮偟挷傋偨偙偲偺儊儌丅
(1) L1 C/A僐乕僪偵偼PRN僐乕僪埲奜偵50bps偺峲朄僨乕僞偑妡偗崌傢偝傟偰偄傞丅廬偭偰PRN僐乕僪傪庢傝彍偄偨斃憲攇偵偼丄偙偺20ms枅價僢僩斀揮偵婲場偡傞埵憡斀揮偑娷傑傟偰偄傞丅
(2) (1)偺斃憲攇捛旜偵偼僐僗僞僗儖乕僾偲屇偽傟傞PLL偑巊傢傟傞丅偙偺PLL偼20ms枅埵憡斀揮偵懴惈傪帩偮傛偆丄敿攇挿
(180搙) 扨埵偱儘僢僋偡傞傛偆嶌傜傟偰偄傞丅廬偭偰擖椡斃憲攇偵儘僢僋偟偨斃憲攇儗僾儕僇偵偼敿攇挿
(180搙) 偺濨枂惈偑尰傟傞丅偙偺濨枂惈傪夝寛偡傞偨傔偵偼峲朄僨乕僞嵞惗偑昁梫偱偁傞丅
(3) 峲朄僨乕僞嵞惗偵偼摿掕偺僾儕傾儞僽儖
(傑偨偼斀揮僾儕傾儞僽儖) 偵傛傝僒僽僼儗乕儉愭摢傪専弌偡傞丅偦偺屻僷儕僥傿媦傃師僼儗乕儉僾儕傾儞僽儖偵傛傝専弌偟偨僼儗乕儉偑惓偟偄偙偲傪妋擣偡傞丅僒僽僼儗乕儉廃婜偼6昩側偺偱丄僒僽僼儗乕儉専弌偵偼斃憲攇儘僢僋屻6乣12昩懸偮昁梫偑偁傞丅(嵟弶偺僾儕傾儞僽儖専弌傑偱0乣6昩+師僼儗乕儉僾儕傾儞僽儖6昩)
(4) 僒僽僼儗乕儉傪専弌偡傞偲僾儕傾儞僽儖斀揮桳柍偱斃憲攇偺敿攇挿濨枂惈傪夝寛偱偒傞丅
斃憲攇偺敿攇挿濨枂惈夝寛傪崅懍壔偡傞偨傔偵偼丄峲朄僨乕僞偑30昩傑偨偼12.5暘娫妘偱摨偠僷僞乕儞傪孞傝曉偡偙偲傪棙梡偡傞偙偲偑偱偒傞偑丄偙傟傪幚憰偟偰偄傞庴怣婡偑偁傞偐偼晄柧偱偁傞丅傑偨曔懆帪娫偺偆偪埲忋偺6乣12昩偼敿攇挿濨枂惈傪夝寛偡傞偩偗偵昁梫側偺偱丄180搙偺埵憡斀揮傪嫋偣偽傕偭偲崅懍偵曔懆壜擻偱偁傞丅幚偼C/A僐乕僪偺1ms偺濨枂惈夝寛偵傕峲朄僨乕僞偺Z僇僂儞僩傪巊偆偺偱峲朄僨乕僞嵞惗偑昁梫偵側傞偑丄偙傟偼堦搙曔懆偟偰偟傑偊偽捛旜偑奜傟偰傕帪寁傗庴怣婡埵抲偑1ms埲忋偢傟側偗傟偽栤戣側偄偺偱抁偄怣崋抐偱偼嵞曔懆惈擻偼楎壔偟側偄丅
(曗懌: 敿攇挿濨枂惈傪夝寛偟側偄斃憲攇埵憡傪弌椡偡傞婡擻傪帩偭偨惛枾應埵梡庴怣婡偑偁傞偐偳偆偐偼晄柧偱偁傞丅彮側偔偲傕NovAtel
OEMV偵偼偙偺僆僾僔儑儞偼側偄丅傑偨敿攇挿濨枂惈傪夝寛偟側偄偱傕媅帡嫍棧偩偗弌椡偱偒傞偼偢偱偁傞偑丄偙偺婡擻傪帩偭偨庴怣婡偑偁傞偐傕晄柧偱偁傞丅8/27 捛婰)
..................................................................................................................................
T.Creel et al., New, Improved GPS, GPS World, 2006
L-AII (Legacy Accuracy Improvement Initiative)
偵偮偄偰GPS World帍偵彮偟徻偟偄婰帠偑偁偭偨偺偱揬偭偰偍偔丅偙偺婰帠偵傛傟偽L-AII偼2005擭6寧偐傜12寧偵偐偗偰戝晹暘姰椆偟偰偄傞傜偟偄丅L-AII慜屻偺儕傾儖僞僀儉婳摴丒帪寁寛掕
(ZAOD) 媦傃曻憲楋 (SIS) 偺URE (User Range
Error) 偑恾7,8偵帵偝傟偰偄傞丅ZAOD偵娭偟偰偼戝暆側夵慞偑尒傜傟傞偑SIS偵娭偟偰偼傢偢偐側夵慞偵巭傑偭偰偄傞丅SIS
URE偵娭偟偰偼婛偵塹惎帪寁曄摦偑庡岆嵎梫場偲側偭偰偟傑偭偰偄傞偺偱丄屻偼峲朄儊僢僙乕僕峏怴廃婜傪抁偔偡傞埵偟偐側偄丅偄偢傟偵偟偰傕ephemeris偼婛偵扨撈應埵偵巊偆偵偼廫暘偡偓傞惛搙偵払偟偰偄傞偲偼尵偊傞偲巚偆丅
(曗懌: 扨撈應埵偱偼婛偵儅儖僠僷僗媦傃揹棧憌抶墑曗惓岆嵎偑巟攝揑側岆嵎梫場偵側偭偰偄傞偺偱丄ephemris傗塹惎帪寁僷儔儊乕僞偺惛搙夵慞偼丄嵟廔揑側應埵夝夵慞偵偁傑傝婑梌偟側偄偲偄偆偙偲丅崱屻L2C,
L5偑晛媦偟揹棧憌曗惓忦審偑椙偔側傟偽堄枴偑弌偰偔傞偑丄偙傟傕MSAS摍偺DGPS傪巊偊偽椙偄偺偱傕偆ephemeris夵慞偼偦傟傎偳桳傝擄偔側偄丅ephemeris夵慞偑桳傝擄偄偺偼挿婎慄RTK偔傜偄偩傠偆丅8/26捛婰)
..................................................................................................................................
僱僢僩儚乕僋宆RTK偺暥專傪挷傋偰偄偰婥偵側偭偨偙偲偺儊儌丅
RTK-GPS偱偼婎弨嬊-儘乕僶偺昗崅嵎偑戝偒偄応崌丄婥埑嵎偵敽偆懳棳寳抶墑(dry崁)偺嵎偑戝偒偔側傝丄庡偵應埵夝悅捈惉暘偵僆僼僙僢僩岆嵎傪惗偠傞丅偙偺岆嵎傪寉尭偡傞偨傔偵偼偱偒傟偽婎弨嬊媦傃儘乕僶埵抲偺婥埑偱曗惓偡傞曽偑傛偄丅幚應抣偑側偄応崌昗弨戝婥傪巊偆偙偲偑懡偄偑偙傟偱偼1%偡側傢偪揤捀曽岦偱2cm掱搙偺儌僨儖岆嵎傪惗偠傞
(憡懳應埵偱偼偙偺嵎暘偑岆嵎偲偟偰岠偔)丅
挷傋偨斖埻偱偼婛懚僱僢僩儚乕僋宆RTK偺曗惓偵偍偄偰丄婎弨嬊娫昗崅嵎傗儘乕僶偲偺昗崅嵎傪峫椂偟偰偄傞傕偺偼傎偲傫偳側偄丅偙傟偼摿偵應埵夝悅捈惉暘偵埆塭嬁傪梌偊偰偄傞偼偢偱偁傞丅
懳棳寳抶墑偵傛傞岆嵎傪掅尭偡傞偨傔偵偼丄悢抣梊曬儌僨儖傪庢傝崬傫偱儌僨儖曗惓偡傞偺偑嵟傕娙扨偱偁傞丅尰嵼偺婥徾挕偺儊僜僗働乕儖儌僨儖
(MSM) (Wikipeida) 偺悈暯暘夝擻偼5km側偺偱丄婥埑偩偗偱側偔鈌枾側悈忲婥検傕僱僢僩儚乕僋宆曗惓偵庢傝崬傫偱偁偘傟偽傛傝桳岠偱偁傠偆丅偨偩崱偺偲偙傠僱僢僩儚乕僋宆曗惓儊僢僙乕僕偵懳棳寳僷儔儊乕僞傪摫擖偡傞摦偒偼傎偲傫偳柍偄傛偆偱偁傞丅偙傟偼傕偟偐偡傞偲夝偺忋壓惛搙傪婥偵偡傞墳梡偑彮側偄偣偄側偺偐傕偟傟側偄丅
悢抣梊曬儌僨儖傪巊偭偰惛枾應埵偺惛搙傪忋偘傛偆偲偄偆尋媶偼婛偵偄偔偮偐側偝傟偰偄傞偑丄崱傑偱偼儌僨儖偺嬻娫暘夝擻偑峳偔偦傟傎偳桳岠偱偼側偐偭偨丅婥徾挕偺応崌丄嶐擭3寧偺僗僷僐儞峏怴偵敽偄MSM偺儊僢僔儏偑10km仺5km丄峏怴娫妘偑6H仺3H偵夵慞偝傟偨丅偙傟偔傜偄偺暘夝擻偑偁傞偲惛枾應埵惛搙偺夵慞偵桳岠偵巊偊傞偺偱偼側偄偐偲巚偆丅幚偼GT0.6.3偵偼悢抣梊曬儌僨儖傪巊偭偰懳棳寳曗惓傪峴偆婡擻傗GRIB丄婥徾挕GPV宍幃僼傽僀儖偺撉傒崬傒婡擻傪婛偵帩偨偣偰偁傞丅偙偺曈偺尋媶傕柺敀偦偆側偲偙傠偱偁傞丅
..................................................................................................................................
8/17偵嵟嬤偺僨僕僞儖怣崋張棟庴怣婡偵偍偄偰庴怣婡DCB偼壗偵婲場偡傞偺偩傠偆丄偲彂偄偨偑丄傛偔峫偊傞偲L1偲L2斃憲攇廃攇悢偼300MHz傕棧傟偰偄傞栿偱丄RF抜傪摨堦偵偡傞偺偼擄偟偄偩傠偆偙偲偵婥偑晅偄偨丅擇廃攇庴怣婡偺RF晹偵娭偡傞暥專偑側偐側偐尒偮偐傜側偄偺偩偑丄懡暘懡偔偺庴怣婡偱L1偲L2偺RF+A/D夞楬偼暘棧偝傟偰偄傞偺偱偼側偄偐偲巚偆丅偙傟偑庴怣婡DCB偺尨場偵側偭偰偄傞偺偱偼側偄偐丅偝偰偙偙傑偱峫偊偰晜偐傫偱偒偨媈栤丅
(1) RF+A/D夞楬偼摨堦偲峫偊傜傟傞C1-P1丄C2-P2
庴怣婡DCB偼傎傏0偲峫偊偰傛偄偐?
(2) 庴怣婡DCB偺帪娫曄摦偼柍帇偱偒傞偐? (柍帇偱偒側偄偲栤戣偑敪惗偡傞婥偑偟偨偺偩偑丄傛偔峫偊傞偲慡塹惎摨堦偵曄摦偡傞偺偱偁傟偽帪寁曄摦偲摨偠埖偄偑偱偒傞偺偱晛捠偼栤戣偵偼側傜側偄)
.....................................................................................................................................
GPS World Discussion Forums, What causes half-cycle ambiguities?
half-cycle ambiguity偵偮偄偰偺Q/A丅偙偺夞摎偵傛傞偲敿攇挿偺Ambiguity偑敪尰偡傞偺偼埲壓偺働乕僗丅
(1) 斃憲攇PLL偑斀揮偟偨斃憲攇傪捛愓偟偰偟傑偆働乕僗丅
(2) "squareing" 媄弍傪巊偭偨擇廃攇庴怣婡丅
偨偩偟(1)偼12昩 (僒僽僼儗乕儉挿亊2) 偁傟偽
(峲朄僨乕僞偺) 僾儕傾儞僽儖僷僞乕儞偱斀揮傪専弌丒廋惓偱偒傞丅12昩埲壓偺帪娫撪偱(1)偺僄儔乕偑敪惗偟偨応崌丄敿攇挿Ambiguity偑敪惗偡傞偑偙傟偼掅SN斾偺帪偵偟偐婲偙傜側偄偺偱杦偳偺応崌偙偺娤應偼庴怣婡偱幪偰傜傟傞偲偟偰偄傞丅
(2) 偼強堗屆偄乽僐乕僪儗僗乿僞僀僾偺 (柉惗梡)
擇廃攇庴怣婡偺応崌偱尰嵼偺庴怣婡偵偼傑偢摉偰偼傑傜側偄丅栤戣偼(1)偱丄埲忋偑杮摉側傜僐乕僪曔懆屻嵟戝12昩偼懸偨側偄偲埵憡斀揮傪専弌偱偒側偄偐傜嵞曔懆偺帪娫偑偦偺暘偩偗怢傃傞偲偄偆偙偲偵側傞丅偙傟偼丄堏摦懱偺傛偆偵昿斏偵僗儕僢僾傪婲偙偡応崌偵偼戝偒側惈擻掅壓偵偮側偑傞丅6/7偵NovAtel庴怣婡偺嵞曔懆惈擻偺榖傪彂偄偨偑帪娫偑偐偐偭偰偄傞尨場偺堦偮偼偙傟偐傕偟傟側偄丅
傑偨丄ublox傗Garmin摍偺楑壙堦廃攇庴怣婡偱"half-cycle resolved"側斃憲攇埵憡傪弌椡偡傞傕偺偑偁傞偑丄偙傟傜偼庴怣婡F/W偲偟偰斃憲攇埵憡斀揮専弌丒廋惓婡擻傪帩偨側偄偺傕偺傕偁傞偐傕偟傟側偄丅偙傟偼RTK偵巊偆応崌偵AR惈擻掅壓偵宷偑傞偺偱側傫偲偐庴怣婡懁偱懳墳偟偰傎偟偄偲偙傠偱偁傞丅 (曗懌: ublox偺document偵"half-cycle ambiguity
resolved"側carrier-phase傪弌椡偡傞偲偄偆昞尰偑偁偭偰丄崱傑偱偙傟偼乽斀揮carrier
phase傪弌椡偡傞偙偲偑偁傞乿偲偄偆堄枴偩偲巚偭偰偄偨偺偩偑丄傛偔峫偊傞偲乽敿攇挿ambiguity傪夝寛偟偨乿偡側傢偪乽斀揮carrier-phase偼廋惓嵪偺乿偲偄偆堄枴偵庢傞曽偑帺慠偩偲婥偑晅偄偨丅Garmin偺応崌偼斀揮carrier-phase傪弌椡偡傞偺偱懳嶔偑昁梫偲偄偆偺傪壗偐偺婰帠偱撉傫偩婰壇偑偁傞丅偨偩偙偺栤戣偼庴怣婡F/W偱梕堈偵懳嶔壜擻側偺偱嵟怴偺庴怣婡偱偼懳嶔嵪傒偺壜擻惈傕偁傞丅18:40捛婰)
偄偢傟偵偟偰傕應埵傾儖僑儕僘儉偺夵椙偺偨傔偵傕庴怣婡撪晹峔憿偺棟夝偼偲偰傕廳梫偱偁傞偲巚偆丅
RTCA/DO-229C, Minimum Operational Performanc Standards
for Global Positioning System/Wide Area Augmentation
System Airborne Equipment, 2001
MSAS偑弨嫆偟偰偄傞SBAS婯奿丅MSAS僨乕僞傪應埵僾儘僌儔儉偵慻傒崬傓偨傔偵昁梫側偺偱峸擖丅$370+$2(shipping)
栫丅偡偖偵抦傝偨偐偭偨偺偼SBAS偺ephemeris宍幃偲寁嶼傾儖僑儕僘儉偩偗側偺偱偦傟偵偟偰偼崅偄丅崱擭偵側偭偰傕偁傑傝峫偊偢偵暥專傪攦偭偰偄傞丅彮偟帺惂偣偹偽丅
恄屗峲嬻塹惎僙儞僞乕, 塣桝懡栚揑塹惎梡塹惎峲朄曗嫮僔僗僥儉(MSAS)帋尡怣崋偺憲怣偵偮偄偰, 2007/8/16
MSAS惓幃塣梡奐巒捠抦丅2007/9/27偵怣崋愗傝懼偊梊掕丅
.....................................................................................................................................
嵟嬤丄Kaplan ed. 偺Understanding GPS Principles and Application
(2nd ed.) 傪撉傫偱偄傞偺偩偑丄摿偵應埵怣崋傗庴怣婡愝寁偵娭偡傞撪梕偼廏堩偱偲偰傕嶲峫偵側傞丅偪傚偭偲崅偄偺偩偑偍姪傔嶲峫彂丅
偲偙傠偱嵟嬤偺庴怣婡偱偼RF+A/D屻偺怣崋張棟晹偼杦偳僨僕僞儖壔偝傟偰偄傞偐傜丄偪傚偭偲峫偊傞偲庴怣婡DCB偲偄偆偺偼尨棟揑偵敪惗偟側偄
(偁傞偄偼敪惗偟側偄傛偆偵愝寁偱偒傞) 條側婥偑偡傞偺偩丄尰幚揑偵偼懡偔偺庴怣婡偱戝偒側DCB偑敪惗偟偐偮庴怣婡屌懱枅偵偽傜偮偔傜偟偄
(偙傟偑杮摉偐偼偪傖傫偲帺暘偱妋偐傔偨栿偱偼側偄)
丅偝偰丄偙傟偼庴怣婡撪晹偺壗偵婲場偡傞傕偺側偺偩傠偆丅GPS庴怣婡偵徻偟偄曽嫵偊偰偔偩偝偄丅
.....................................................................................................................................
惛枾應埵偺夝愢傪彂偙偆偲偡傞偲丄偳偆偟偰傕嵟弶偵乽斃憲攇埵憡乿偲偼壗偐傪偪傖傫偲愢柧偡傞昁梫偑偁傞傢偗偩偑丄偙傟傪尩枾偵掕媊偡傞偺偼偦傟掱娙扨偱偼側偄丅椺偊偽堦嶐擭偺GPS僔儞億僠儏乕僩儕傾儖尨峞偱偼埲壓偺條偵彂偄偨丅
> 斃憲攇埵憡偲偼庴怣婡偱暅挷偟偨應埵怣崋偺斃憲攇埵憡妏傪楢懕揑偵應掕偟偨傕偺偱偁傞丅
摉帪偼抁偔偟傛偆偲戝曄嬯楯偟偰彂偄偨偺偱偼桳傞偑丄崱撉傒曉偟偰傒傞偲濨枂偱misleading側暥偺條偵巚偊傞丅偲偄偆偙偲偱怴偟偄夝愢傪彂偄偰偄傞偺偩偑嵟弶偵偙偺愢柧偱偮偭偐偊偰愭偵恑傑側偄丅娤揰傪曄偊偰乽庴怣婡偱寁應偟偨應埵怣崋斃憲攇偺僪僢僾儔僔僼僩愊嶼抣傪埵憡妏偱昞偟偨傕偺乿埵偵偟偨曽偑傛傝尩枾側婥偼偡傞偑丄偦傟偑壗屘應嫍娤應検偲偟偰巊偊傞偐傪彂偐側偄偲愢柧偵側傜側偄偟...丅(扤偑偮偗偨偺偐抦傜側偄偑丄傕偲傕偲"carrier phase"偲偄偆梡岅帺懱偁傑傝揔愗偲偼尵偊側偄丅傛傝尩枾偵丄"carrier beat phase"傗"integrated carrier Doppler phase"偲屇傫偱偄傞暥專傕偁傞丅)
RINEX2.1巇條彂傪尒偨傜埲壓偺條偵彂偄偰偁偭偨丅娙寜偱埆偔側偄掕媊偩偲巚偆丅偙傟傪彮偟捈偟偰巊偍偆偐丅
> actually being a measurement on the
beat frequency between the received carrier
of the
> satellite signal and a receiver-generated
reference frequency.
GPS for Geodesy 2nd Ed. (P.J.G.Teunissen ed., Springer, 1998) 偱偼埲壓偺條丅幚憰傪塀偟偨娙寜側昞尰丅媅帡嫍棧偲偺懳斾偑偮偒傗偡偄偺偱丄偙偭偪偺曽偑椙偄偐傕偟傟側偄丅
> The carrier phase 冇k_i is equal to
the difference between the phase 冇_i of
the receiver
> generated carrier signal at signal reception
time, and the phase 冇k of the satellite
generated
> carrier signal at signal transmission
time. Only the fractional carrier phase can
be measured
> when a satellite signal is acquired.
i.e. an integer number of N of full cycles
is unknown. N is
> called the carrier phase ambiguity.
偄偢傟偵偟偰傕廳梫側偺偼庴怣斃憲攇偺埵憡偦偺傕偺傪應偭偰偄傞偺偱偼側偔丄庴怣斃憲攇偺埵憡偲庴怣婡撪晹偱敪惗偟偨(僲儈僫儖斃憲攇廃攇悢偺)婎弨怣崋埵憡偲偺嵎暘傪應偭偰偄傞偲偄偆揰偱偁傞丅"carrier phase"偲偄偆梡岅偐傜偼偙偺揰偑憐憸偮偒偵偔偄丅(幚偼丄媅帡嫍棧偺掕媊傕傛偔帡偰偄偰庴怣僐乕僪偵崗傑傟偨帪崗偲庴怣婡撪晹帪寁偵傛傞帪崗偲偺嵎暘傪應偭偰偄傞偺偱偁傞丅)
USGS Earthquake Hazards Program, Magnitude 7.9 - Near the coast of central
Peru
儁儖乕増娸偱嫮偄抧恔丅2007/8/15 23:40UTC M7.9丅捗攇偑怱攝偩丅恔尮偐傜500km埵偺強偵IGS娤應揰
AREQ (1Hz) 偑偁傞偺偱屻偱夝愅偟偰傒偨偄丅
.....................................................................................................................................
8/1偵GPS CS (Control Segment) 偺AEP (Archtecture Evolution Plan) 偵偮偄偰彮偟怗傟偨偑丄Understanding GPS Principles and Application 2nd Ed. (E.D.Kaplan ed, Artech House, 2006) 傪撉傫偱偄偨傜丄偦偺撪梕偵偮偄偰彂偐傟偰偄偨偺偱彮偟徯夘偡傞丅(3.3.2)
(1) 崱屻悢擭偺偆偪偵GPS CS偱偼丄L-AII (Legacy
Accuracy Improvement Initiative) 偲AEP偲屇傇2偮偺戝偒側峏怴偑峴傢傟傞丅
(2) L-AII偱偼丄MCS (Master Control Station)
偺partitioned Kalman Filter偺僒億乕僩MS (Monitor
Station) 悢+塹惎悢偑憹壛偝傟傞 (6+6仺20+32)
(MCS偺峲朄僼傿儖僞偼張棟惈擻偺惂栺偐傜暘妱張棟偝傟偰偄傞傜偟偄)丅傑偨NGA
(National Geospatial-Intelligence Agency)
偑採嫙偡傞MS偑捛壛偝傟慡晹偱20嬊偲側傞丅埲忋偵傛傝URE
(User Rang Error) 偑栺1/2偵側傝丄儌僯僞嬊偺壜帇棪傕1.5嬊/塹惎仺3-4嬊/塹惎偵夵慞偝傟傞丅L-AII偵偼MCS張棟偱巊梡偡傞廳椡丄挭幀丄EOP丄懢梲鐃幩埑傗懳棳寳偲偄偭偨儌僨儖偺夵慞傕娷傑傟傞丅
(3) AEP偱偼丄MCS偺婛懚儊僀儞僼儗乕儉 (IBM+MVS-OS+SNA)
偑暘嶶宆儚乕僋僗僥乕僔儑儞 (Sun+UNIX+TCP/IP)
偵抲偒姺偊傜傟傞丅怴僔僗僥儉偱偼僆僽僕僃僋僩巜岦愝寁丄G-Ether
LAN丄Oracle DB摍偑庢傝擖傟傜傟傞丅AEP偱偼IIF塹惎僒億乕僩丄嬤戙壔怣崋丄怴偟偄峲朄儊僢僙乕僕偲偄偭偨抜奒揑側婡擻奼挘擻椡偑採嫙偝傟傞丅側偍怴偟偄峲朄儊僢僙乕僕偱偼婳摴fit惛搙偑戝暆偵夵慞偝傟傞丅
L-AII偑婛偵側偝傟偰偄傞偺偐丄9寧偵梊掕偝傟偰偄傞AEP偲摨帪偵側偝傟傞偺偐偼傛偔暘偐傜側偄丅MS偑憹偊傞偙偲丄儌僨儖夵慞丄CNAV摫擖偵傛傝塹惎婳摴寛掕丒梊曬惛搙偼偐側傝椙偔側傞偙偲偑梊憐偝傟傞丅傕偟偐偡傞偲曻憲楋偱傕IGU偵嬤偄惛搙偑弌傞傛偆偵側傞偐傕偟傟側偄丅偙傟偼挿婎慄RTK偺惈擻偵偼戝偒偔岠偔偺偱偼偲巚偆丅偨偩塹惎帪寁梊曬惛搙偼偁傑傝夵慞偝傟側偄偲巚傢傟傞偺偱扨撈應埵偺惛搙夵慞偵婑梌偡傞偐偼彮偟媈栤偱偁傞丅
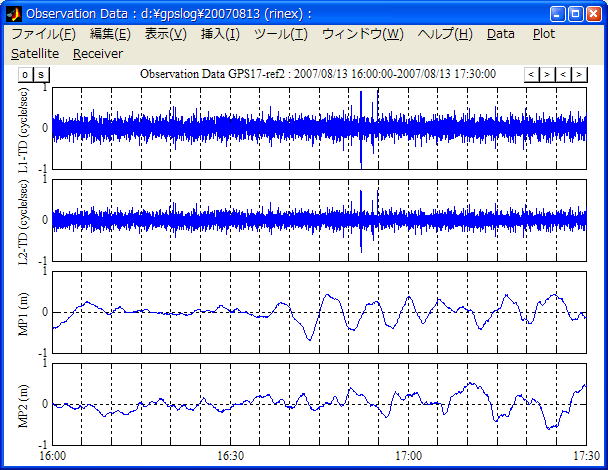
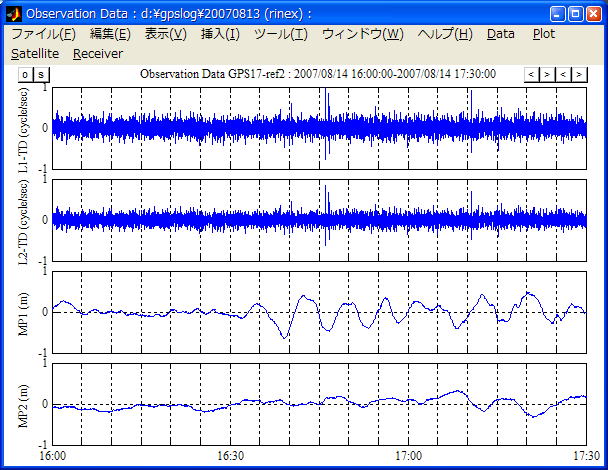
彮偟栿桳偭偰丄壆崻偺忋偺傾儞僥僫偱L2P(Y)偲L2C偺嶨壒偺嵎傪應傞丅Block IIR-M PRN17偺24H棧傟偨摨堦帪娫懷偺1Hz 1.5H暘娤應僨乕僞丅NovAtel OEMV+GPS-702-GG丅phase偵偮偄偰偼epoch娫3廳嵎丄code偼MP慄宍寢崌偱嶨壒惉暘偺傒拪弌偟偰偄傞丅code儅儖僠僷僗偑L2C偺曽偑彮偟桳棙偵側偭偰偄傞偑懠偼偼杦偳嵎偼側偄丅偨偩丄L2C桳岠偵偡傞偲庴怣婡偺摦嶌偑晄埨掕偵側傞丅L2C偵偮偄偰偼庴怣婡F/W偵傑偩晄嬶崌偑巆偭偰偄傞偺偐傕偟傟側偄丅崱偺偲偙傠L2C傪巊偆昁慠惈偼偁傑傝側偄側偁偲偄偆寢榑丅
嵍: L2C柍岠 (L1CA+L2P(Y))丄塃: L2C桳岠 (L1CA+L2C)
.....................................................................................................................................
G.Wubbena, New GNSS Signals and Ambiguity
Resolution, EGU General Assembly, 2007 (PDF 1.2MB)
偐側傝儃儕儏乕儉偺偁傞僾儗僛儞帒椏丅懡GNSS
(GPS+Galileo+GLONASS) 偺應埵惛搙傗AR惈擻偺僔儈儏儗乕僔儑儞夝愅寢壥偑庡側撪梕丅側偐側偐柺敀偄丅
嵟屻偺曽偵State Space Representation (SSR)
偲屇傇怴偟偄僱僢僩儚乕僋宆RTK曗惓宍幃偵偮偒怗傟偰偄傞丅SSR偼丄廬棃偺VRS,
FKP, MAC偺條側娤應検曗惓偱偼側偔丄婳摴丄帪寁丄懳棳寳/揹棧憌摍偺忬懺僷儔儊乕僞傪捈愙偵曗惓検偲偟偰憲傞曽幃丅廬棃曽幃偱偼峀堟曗惓検傪憲傠偆偲偡傞偲忣曬偺僟僽儕偑敪惗偟憲怣岠棪偑埆偐偭偨偑丄SSR偼偦偺栤戣偑側偄偺偱峀堟曻憲偵岦偄偰偄傞丅撪梕揑偵偼儕傾儖僞僀儉PPP偵嬤偄偑丄廬棃PPP偱偼AR偑崲擄偱偁傞偑SSR偱偼Ambiguity偺惍悢惈傪堐帩偟AR壜擻偲偡傞偲偟偰偄傞丅
SSR偵偮偄偰RTCM SC104偱怴儚乕僉儞僌僌儖乕僾偑敪懌偟偨偲偁傞偑丄傑偩challenging側壽戣偑偄偔偮傕巆偭偰偄傞偟丄媄弍揑側幚尰惈偺栚搑偑杮摉偵偁傞偺偩傠偆偐偲彮偟媈栤偵偼巚偆丅傑偨偙傟傜偺曽幃偼峀堟偺婎弨嬊娤應僨乕僞傪廤拞張棟偟懡悢偺忬懺僷儔儊乕僞傪儕傾儖僞僀儉悇掕偡傞昁梫偑偁傝丄偁傑傝僗僕偑椙偄曽幃偲偼尵偊側偄婥傕偡傞丅偨偩丄傗傞傋偒偙偲偼偨偔偝傫偁傞偺偱尋媶懳徾偲偟偰偼柺敀偦偆側強偱偼偁傞丅
.....................................................................................................................................
Los Angeles Air Force Base, Pseudorandom Noise (PRN) Code Assignments
傛偔抦傜傟偰偄傞條偵GPS偱偼PRN (Pseudorandom
Noise) 僐乕僪偲屇傇奼嶶晞崋傪巊偭偰怣崋暘棧傗塹惎幆暿傪峴偆偺偱丄GPS丄SBAS摍曗惓僔僗僥儉丄懠GNSS偲偺娫偱僐乕僪偺廳暋丒姳徛傪旔偗傞偨傔丄PRN僐乕僪偺妱傝摉偰傪挷惍偡傞昁梫偑偁傞丅偙偺妱傝摉偰偼暷崙嬻孯偺GPSW
(Global Positioning Systems Wing) 偲屇傇僆僼傿僗
(曗懌: Wing=air force unit (wiki) 偱埲慜偼NAVSTAR GPS JPO (Joint Program
Office)偲屇偽傟偰偄偨丅9/2捛婰) 偵傛傝娗棟偝傟偰偄傞丅杮僒僀僩偱偼GPS
PRN僐乕僪妱傝摉偰怽惪庤懕偒傗婛偵妱傝摉偰傜傟偨C/A,
L2C, L5 PRN僐乕僪偺僥乕僽儖偑摼傜傟傞丅
PRN僐乕僪妱傝摉偰僥乕僽儖傪尒傞偲4/6偵彂偄偨PRN127 (C/A) 偼傗偼傝82E偺INSATNAV
(懡暘僀儞僪偺GAGAN) 偱偁偭偨偙偲偑傢偐傞丅傑偨婛偵PRN183-202
(C/A), PRN193-202 (L2C, L5), 偑弨揤捀塹惎
(QZSS) 梡偵妱傝摉偰傜傟偰偄傞偙偲傕暘偐傞丅
.....................................................................................................................................
壞媥傒丅柧擔偐傜暅婣梊掕丅(8/9 18:41)
.....................................................................................................................................
asahi.com, 抧媴偼5儈儕彫偝偐偭偨 崙嵺婡娭偑愒摴捈宎傪夝愅, 2007/08/04
撪梕偑傢偐傝偢傜偄婰帠丅乽ITRF偺嵟怴斉乿偲偄偆偐傜偵偼ITRF2005偺偙偲偩傠偆偟乽崙嵺婡娭乿偲偄偆偺偼IERS偩偲巚偆偺偩偑丄傕偲傕偲乽愒摴偺捈宎乿偲偼壗傪傕偭偰掕媊偟偰偄傞偺偩傠偆丅ITRF2005偼妋偐嶐擭10寧偵偼儕儕乕僗偝傟偰偄偨偼偢偩偟丄ITRF2005偺慜偼ITRF2000偩偐傜5乣6擭傇傝偺夵掶偩偟丄帠幚岆擣傕懡偄丅5mm偲尵偆偺偼ITRF2000偲ITRF2005偺曄姺僷儔儊乕僞傪巜偟偰偄傞偺偩傠偆偐丅嶐擭10/6偺旛峫榐傪尒曉偟偰傒傞偲ITRF2005仺ITRF2000偺scale曄姺僷儔儊乕僞偼0.4+0.008/yr
ppb丄愒摴捈宎偵捈偟偰6380km亊2亊0.4ppb=5.1mm側偺偱丄偙傟傪巜偟偰偄傞偺偐傕偟傟側偄丅偟偐偟丄撪梕偺濨枂偝偲偄偄彂偄偰傞婰幰偑慡偔棟夝偱偒偰偄側偄偺偩傠偆偲偼巚偆丅
Sankeiweb, 抧媴偼5儈儕彫偝偐偭偨! 惛枾應掕偱敾柧, 2007/08/05
僒儞働僀偺曽偑彮偟徻偟偄偑偙傟傕帠幚岆擣偑懡偄丅偆乣傫丅
.....................................................................................................................................
嶐擔彂偄偨審傪撉傒捈偟偰傒偰丄柧傜偐偵塕傪彂偄偰偄傞側偁偲婥晅偄偨丅偲傝偁偊偢廋惓偟側偄偑丄偳偙偐偱偪傖傫偲惍棟偟偨偄偲偼巚偆丅
.....................................................................................................................................
嶐擔彂偄偨婎弨嬊娫婎慄Ambiguity悇掕庤朄偺審偺曗懌丅
娤應曽掱幃偼僐乕僪/埵憡偺擇廳嵎傪巊偄塹惎/庴怣婡帪寁偼徚嫀偟偰偄傞丅傑偨揹棧憌悅捈抶墑偼庴怣婡娫堦廳嵎傪忬懺曄悢偵偲偭偰偄傞丅塻偄曽偼丄堦廳嵎傪忬懺曄悢偵偲傞偲擇廳嵎娤應曽掱幃偱偼偆傑偔廂懇偟側偄偺偱偼偲巚傢傟傞偐傕偟傟側偄偑丄偙傟偼僐乕僪娤應抣偑擖偭偰偄傞偺偱栤戣側偄丅傕偭偲塻偄曽偼丄堦廳嵎傪忬懺曄悢偵偲傞偲庴怣婡帪寁旘傃偑栤戣偵側傞偺偱偼巚傢傟傞偐傕偟傟側偄偑丄偙傟偼栤戣偵側傞
(惓偟偔偼丄旘傇偺偼栤戣側偄偺偩偑丄帪寁旘傃帪偵埵憡娤應検偑旘偽側偄働乕僗偑栤戣偵側傞)丅幚偼偙傟偼偁傑傝惓摑揑偱側偄庤朄偱夞旔偟偰偄傞丅
偙偆傗偭偰丄彂偒弌偟偰傒傞偩偗偱怓乆偲栤戣偑惍棟偝傟傞偺偱丄偙傟傕傕偆彮偟夵椙偟偰偐傜偪傖傫偲榑暥偵傑偲傔偨曽偑椙偄偐傕偟傟側偄丅側偍丄婎弨嬊娫婎慄AR偺庤朄偼挿婎慄RTK偵杦偳偦偺傑傑墳梡偱偒傞丅偨偩RTK偺応崌偼儘乕僶埵抲壜曄側偺偱傛傝忦審偑埆偔丄晛捠側偐側偐FIX偟側偄丅偙傟傪夵慞偡傞偨傔偵偼偳偆偟偰傕奜晹偐傜惛枾側揹棧憌/懳棳寳悇掕抣傪擖椡偡傞昁梫偑偁傞傢偗偱丄7/30偵彂偄偨傛偆偵扤偐偑GEONET傪巊偭偨儕傾儖僞僀儉懳棳寳/揹棧憌悇掕僔僗僥儉傪峔抸偟偰偔傟側偄偐側偁丄偲偼巚偭偰偄傞丅
.....................................................................................................................................
J.F.Raquet, Development of a Method for Kinematic
GPS Carrier-Phase Ambiguity Resolution Using
Multiple Reference Receiver (Ph.D. thesis),
UCGE Report No. 20116, 1998 (PDF 7.4MB)
僱僢僩儚乕僋宆RTK偵娭偡傞椙偔傑偲傑偭偨攷巑榑暥
(僇儖僈儕戝)丅晅榐B偵巊偭偨婎弨嬊娫婎慄AR庤朄偺夝愢偑偁傞丅傑偢WL+FASF偱WL
Ambiguity傪惍悢壔偟丄師偵揹棧憌僼儕乕Ambiguity偲WL
Ambiguity偐傜L1 Ambiguity傪媮傔嵞搙FASF偱惍悢壔偟偰偄傞丅偨偩偟偙偺榑暥偺庤朄偱偼帪娫暘妱偟偰僶僢僠張棟偟偰偄傞偺偱儕傾儖僞僀儉偱偼側偄丅傑偨丄婳摴偼惛枾楋傪巊偭偰偄傞丅嵟戝600km婎慄偺婎弨嬊栐偱偺FIX棪僌儔僼偑偁傞
偑丄暯嬒90%掱搙偺條偩丅
僱僢僩儚乕僋宆RTK偵偍偄偰偼丄婎弨嬊娫婎慄偺儕傾儖僞僀儉AR偑媄弍揑偵擄偟偔幚憰忋偺尞偵側傞偺偩偑丄偙偺庤朄偵偮偄偰嬶懱揑偵偒偪傫偲夝愢偟偨榑暥偼杦偳側偔丄懡偔偺榑暥偱偼濨枂偵偛傑偐偟偰偄傞
(惢昳偵娭偟偰偼婇嬈僲僂僴僂側偺偱偁偊偰徻嵶傪塀偟偰偄傞偲偄偆壜擻惈偑崅偄偑)丅偦偺揰偱婱廳側榑暥偩偲巚偆丅偟偐偟丄僱僢僩儚乕僋宆RTK偲偄偆偺偼幚憰偺拞恎偑僋儕傾偱側偔丄偁傫傑傝怣梡偱偒側偄側偁偲偄偆報徾偑偁傞偺偱丄偙偺報徾傪暐怈偡傞偨傔偵傕奺幮傕偭偲媄弍徻嵶偵偮偄偰忣曬岞奐傪偡傋偒偩偲偼巚偆丅
L.Dai et al., Real-Time Carrier Phase Ambiguity Resolution
for GPS/GLONASS Reference Station Network, Int. Symp. on Kinematic Systems in Geodesy,
Geomatics & Navigation (KIS2001), 2001
堦墳丄僱僢僩儚乕僋宆RTK偺偨傔偺婎弨嬊娫婎慄儕傾儖僞僀儉AR庤朄偵偮偄偰彂偐傟偰偄傞偺偩偑丄偼偭偒傝尵偭偰撪梕偑傛偔暘偐傜側偄丅揹棧憌抶墑傪慄宍儌僨儖偱昞偡偙偲帺恎偐側傝柍棟偑偁傞偲巚偆偺偩偑丅(揹棧憌僺傾僗億僀儞僩偺峀偑傝偼捠忢悢100km埲忋偵媦傇栿偱偙傟傜偺斖埻偱揹巕枾搙偺gradient偑堦掕偱偁傞偲偡傞偺偼偪傚偭偲峫偊傞偲傑偲傕側惛搙偑弌偦偆側婥偑偟側偄)
偙偺榑暥偵尷傜偢丄偙偙偺偲偙傠婎弨嬊娫婎慄AR庤朄偵偮偄偰挷傋偰偄傞偺偩偑擺摼偱偒傞榑暥偵弌夛傢側偄丅偙傟偼偲偰傕妋棫偟偨媄弍偩偲偼尵偊側偄偺偱偼側偄偐偲巚偆偺偩偑丄婛偵彜梡僒乕價僗傕巒傑偭偰偢偄傇傫偲偨偮傢偗偱丄偙偺僊儍僢僾偼壗偩傠偆丅
偙偆彂偔偲偙側偄偩偺SANE敪昞偱巊偭偰偄偨婎弨嬊娫婎慄Ambiguity偼偳偆傗偭偰媮傔偰偄傞偺偐丄偲媈栤傪傕偨傟傞曽偑偄傜偭偟傖傞偐傕偟傟側偄偺偱娙扨偵徯夘偟偰偍偔丅
(1) 揹棧憌抶墑偼塹惎枅悅捈抶墑検傪random-walk僾儘僙僗偲偟偰儌僨儖壔丅儅僢僺儞僌娭悢偼single-layer-mapping娭悢丅
(2) 懳棳寳抶墑偼嬊枅偺ZWD傪random-walk僾儘僙僗偲偟偰儌僨儖壔丅儅僢僺儞僌娭悢偼NMF(wet)丅ZHD偼昗弨戝婥偲Saastamoinen偱儌僨儖寁嶼丅
(3) 僗儗乕僽婎弨嬊埵抲(僗僞僥傿僢僋)丄塹惎枅揹棧憌悅捈抶墑丄嬊枅ZWD丄堦廳嵎僶僀傾僗傪枹抦偲偟偰C1/P1/L2/L2偺娤應曽掱幃傪棫偰僇儖儅儞僼傿儖僞偱忬懺曄悢偲偟偰堦妵悇掕丅
(4) (3)偱媮傑偭偨堦廳嵎僶僀傾僗(float)傪擇廳嵎偵曄姺丅曄姺屻擇廳嵎僶僀傾僗傪LAMBDA偱惍悢壔丅ratio-test偱validation丅
(5) validation偵捠偭偨擇廳嵎僶僀傾僗傪 (屻偺搒崌偱)
堦廳嵎偵暘夝丅偙偙偱暘夝偺偨傔丄婎弨塹惎偺堦廳嵎僶僀傾僗float悇掕抣傪堐帩偡傞惂栺傪擖傟偰偄傞丅
(6) 偄偭偨傫FIX偟偨傜偦傟傜偺堦廳嵎僶僀傾僗偼hold丅僗儕僢僾偟偨塹惎傗怴偟偄塹惎偼嵞弶婜壔偟偰嵟弶偐傜僶僀傾僗傪悇掕偟捈偟偰偄傞丅
僗儗乕僽婎弨嬊埵抲傪婛抦偲偟偰屌掕偟偰偄側偄偺偼丄屌掕偡傞偲僼傿儖僞偑敪嶶偟傗偡偔側偭偰埨掕偟側偐偭偨偐傜丅懡偔偺働乕僗偱昡壙偟偨傢偗偱偼側偄偑丄婎慄挿偑50km傪墇偊傞偲揹巕婎弨揰偺30s娤應僨乕僞偱偼First Fix傑偱悢帪娫偐偐傞働乕僗傕偁傝丄昁偢偟傕埨掕偟偰懄帪FIX偟偰偄傞傢偗偱偼側偄丅婳摴岆嵎偼儌僨儖壔偟偰偄側偄偺偱婎慄挿偑挿偔側傞偲惛枾楋傪巊偆昁梫傕偁傞偲巚偆丅偙傟偼崱擭偺4寧崰怓乆帋偟側偑傜曇傒弌偟偨丄側傫偲偐巊偊傞偩傠偆偲偄偆庤朄丅埨掕偟偰巊偊傞傛偆偵偡傞偵偼夵椙偡傋偒揰偼偨偔偝傫偁傞丅
.....................................................................................................................................
J.Ray, IGSMAIL-5623, GPS control segment upgrade, 30 Jul, 2007
9寧戞2廡偵GPS偺抧忋娗惂宯 (僐儞僩儘乕儖僙僌儊儞僩)
偺峏怴偑梊掕偝傟偰偄傞丅偙偺寁夋偼AEP (Architecture
Evoluation Plan) 偲屇偽傟偰偍傝丄慡MCS (Master
Control Station) 偺媽幃僔僗僥儉偑尰峴媄弍偵傛傞怴偟偄僔僗僥儉偵抲偒姺偊傜傟傞偲偺偙偲丅
儐乕僓偵偲偭偰傒傞偲丄偙偺峏怴偱壗偑曄傢傞偺偐傛偔暘偐傜側偄偺偩偑丄偙偺庤偺堏峴偵偁傝偑偪側僩儔僽儖偑敪惗偟偦偆側婥偼偡傞丅(Block
IIF懳墳偲傕彂偄偰偁傞偺偱丄傕偟偐偡傞偲CNAV偑偪傖傫偲憲怣偝傟傞條偵側傞偐傕偟傟側偄丅埲慜暦偄偨榖偱偼丄傑偩Block
IIR-M偺L2C偵CNAV偼嵹偭偰偄側偄傜偟偄丅偱傕CNAV偵懳墳偟偰偄傞庴怣婡偭偰婛偵偁傞偺偐側丅)
P.J.G.Teunissen, The LAMBDA method for the GNSS compass, Artificial Satellites, 2006
GPS巔惃寁傊偺LAMBDA偺揔梡丅巔惃寁應偺応崌婎慄挿偑婛抦偱偁傞偲偄偆惂栺傪儌僨儖偵擖傟傞偙偲偑偱偒傞偑丄1廃攇+1僄億僢僋+IMU摍曗彆側偟偺忦審偱惈擻傪忋偘傞偺偼寢峔戝曄丅偲偄偆偙偲偱丄惂栺晅嵟彫擇忔+LAMBDA偱偺AR庤朄偵偮偒榑偠偰偄傞丅惈擻昡壙寢壥偑側偄偟丄懠庤朄偲偺斾妑傕側偄偺偱偙偺庤朄偱偳偺掱搙惈擻夵慞偝傟傞偐傛偔暘偐傜側偄丅埲慜撉傫偩榑暥偱偼儅儖僠僷僗偺塭嬁偱1廃攇偱偼IMU摍曗彆僙儞僒偑昁梫偲偺偙偲偩偭偨丅曗彆側偟1僄億僢僋偱幚梡揑側惈擻偑杮摉偵弌傞偺偩傠偆偐丄偲偄偆媈栤偼偁傞丅
嶁堜, GPS弶婜埵抲嶼弌帪娫(TTFF)抁弅偺偨傔偺専摙, 揹巕忣曬捠怣妛夛 塅拡丒峲峴僄儗僋僩儘僯僋僗尋媶夛,
2007
愭擔嶲壛偟偨SANE尋敪昞偐傜徯夘丅GPS庴怣婡偺弶婜曔懆帪娫
(TTFF) 夵慞偺偨傔塹惎ephemeris傪SBAS曗惓忣曬偵娷傔偰憲怣偡傞曽幃偵偮偄偰偺採埬丅TTFF偼ephemeris憲怣僒僀僋儖30昩偵惂栺偝傟傞偺偱丄TTFF崅懍壔偵偼ephemeris偑懄帪偵巊偊傞傛偆曗惓忣曬偲偟偰憲傟偽椙偄丅偨偩僨乕僞検惂尷偑尩偟偄偺偱埑弅曽朄傪昡壙偟丄塹惎偁偨傝38bit偱嵪傓偲偟偰偄傞丅QZSS偺L1-SAIF偵嵹偣傞偙偲傕専摙拞偺條偩丅偙偺媄弍偲偟偰偼婛偵AGPS偑幚梡壔偝傟偰偄傞偑丄実懷儕儞僋偑柍偄偲巊偊側偄偺偱偙偺庤朄偺桪埵惈偼偁傞丅偨偩庴怣婡F/W偺懳墳偑昁梫側偺偱昗弨壔偝傟側偄偲晛媦偟側偄偺偱偼偲偼巚偆丅
.....................................................................................................................................
| Home | by T.Takasu |