{kind=link}
|
擔婰丒旛峫榐 |
2007 | 2008/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2009 |
| April | May 2008 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
June | Home |
.....................................................................................................................................
屆栰揹婥, GPS掕揰楢懕寁應 DANA2000
1廃攇RTK-GPS偵傛傞懡揰楢懕娤應僔僗僥儉偼僼儖僲偑婛偵彜昳壔偟偰偄偨偺傪幐擮偟偰偄偨丅偙傟偼壩嶳妶摦娔帇摍偱偼婛偵幚愌偑偁傞條偩丅妋偐1僲乕僪偺抣抜傪扤偐偵暦偄偨妎偊偑偁傞偺偩偑丄奣偹懨摉側壙奿偩偭偨偼偢偱偁傞丅
抦偭偰偄傞恖偵偲偭偰偼晛媦宆1廃攇庴怣婡偱RTK-GPS偑壜擻側偙偲偼摉偨傝慜側偺偐傕偟傟側偄丅偦傟偵偟偰偼壗屘壗昐枩傕偡傞2廃攇愱梡庴怣婡偑攧傟傞偺偩傠偆丅傑偁尨場偼暘偐傜側偄偱偼側偄偺偩偑丄偪傚偭偲偁傑傝偵壗偩傛側偁偲偼巚偆丅(堦墳帺暘偺嬥傪弌偟偰2廃攇愱梡庴怣婡攦偭偰偄傞偺偱丄彮偟偼尵偭偰傕椙偄偩傠偆丅扤偐偑僆僆僒儅偺儈儈偼儘僶偺儈儈偲尵傢側偗傟偽偄偗側偄偟丅)
.....................................................................................................................................
柺敀偐偭偨丄偲偄偆姶憐傪壗恖偐偺曽偵捀偄偨偺偱丄敪昞偺撪梕偼偲傕偐偔報徾偲偟偰偼傑偁椙偐偭偨偺偱偼側偄偐偲巚偆丅 應抧娤應偺柺偱傕娤應揰僐僗僩偑壓偑傟偽丄椺偊偽1km娫妘偺旕忢偵鈌枾側GPS庴怣婡僋儔僗僞偱抧堟揑側抧妅曄摦 傪娔帇偡傞偲偐偺墳梡偼廫暘壜擻偩傠偆丅傑偁巹偺婅偄偼惛枾應埵媄弍傪堦斒晛媦偝偣偰怓乆桳塿側墳梡偵峀斖偵 巊偭偰傕傜偄偨偄丄偲偄偆揰偵桳傞偺偱丄偦偺堄恾偑彮偟偱傕揱傢傟偽桳傝偑偨偄偙偲偱偁傞丅
.....................................................................................................................................
崅恵, 掅壙奿堦廃攇庴怣婡傪巊偭偨RTK-GPS惈擻偺昡壙丄壽戣偲偦偺夝寛嶔, 擔杮抧媴榝惎壢妛楢崌2008擭戝夛
杮擔屵屻偺敪昞帒椏up丅僞僀僩儖傪尒偰梤摢嬬擏偩偲尵傢側偄傛偆偵丅偙傟偱傕彮偟偼搘椡偟偨偺偩偗偳丅
.....................................................................................................................................
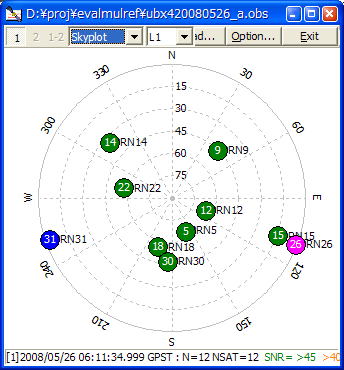
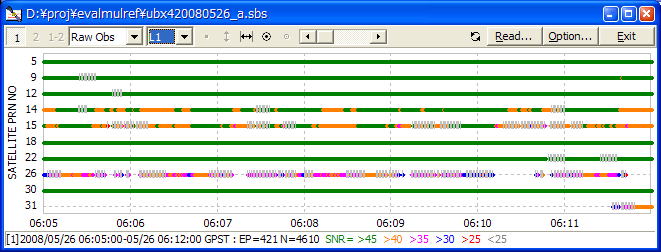
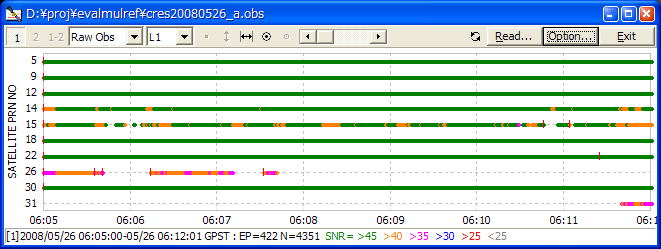
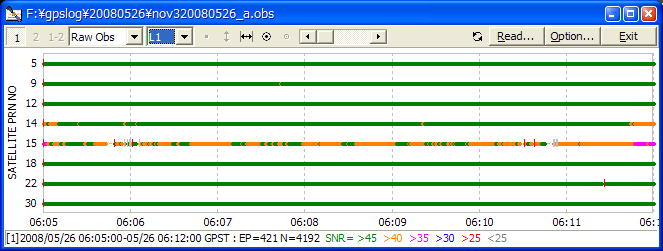
5/26偵偲偭偨1Hz亊7暘僙僢僔儑儞堏摦懱僨乕僞偺庴怣塹惎偲僗儕僢僾忬嫷丅忋:ANN-MS+AEK-4T, 拞:ANN-MS+Crescent, 壓: GPS-702-GG+OEMV-3丅僗儕僢僾偼庴怣婡偺弌椡偡傞儘僢僋儘僗僼儔僌傪尒偰偄傞丅愒廲慄偑捠忢偺僗儕僢僾丄奃怓偑half-cycle偑夝偗偰偄側偄僄億僢僋丅塹惎攝抲偵帵偡傛偆偵丄偙偺帪娫懷7塹惎偑崅嬄妏偵桳偭偰壜帇忦審偼椙偄丅u-blox偼half-cycle僗儕僢僾偑懡偄丅尰峴RTKLIB偼僗儕僢僾傪専弌偡傞偲僶僀傾僗傪儕僙僢僩偟偰偟傑偆偺偱丄僗儕僢僾偺懡偄忬嫷偱惈擻傪弌偡偺偼擄偟偄丅懡暘偙傟傜偺拞偱杮摉偵僗儕僢僾偟偰偄傞偺偼彮側偄偲巚偆偺偱丄偙傟偼僗儕僢僾帪張棟傪傛傝偒傔嵶偐偔惂屼偡傞偲夵慞壜擻偩傠偆丅怣崋偑搑愗傟偰傕悢昩偺応崌偑懡偄偺偱MEMS IMU傪巊偭偨僗儕僢僾廋暅傕桳岠側偼偢偱偁傞丅偙偺働乕僗偱偼楑壙傾儞僥僫偵婲場偡傞惈擻楎壔偼偁傑傝岠偄偰偄側偄條偵尒偊傞丅1km埲撪婎慄丄岲塹惎攝抲丄岲忋嬻帇奅摍丄偐側傝忦審偼晅偔偑楑壙1廃攇庴怣婡偵傛傞堏摦懱RTK-GPS偺幚梡惈偼偁傞偐傕偟傟側偄丅
堏摦懱RTK-GPS偵偍偄偰偼斃憲攇捛旜偺儘僶僗僩惈偑廳梫偱偁傞丅摿偵怣崋偑抁帪娫搑愗傟偰傕惍悢僶僀傾僗偺楢懕惈偑搑愗傟偢丄Half cycle傕弖帪偱夝寛偱偒傞偙偲偑梫媮偝傟傞丅偙偺偨傔偳偆偟偰傕庴怣婡偺斃憲攇捛旜惂屼傪捈愙IMU摍偺奜晹僙儞僒傗塣摦梊應傾儖僑儕僘儉偲摑崌偟偨偔側傞丅婎弨敪怳婍埨掕搙傕廳梫偵側傞偩傠偆丅偙偺揰偱婛懚庴怣婡偱偼惈擻夵慞偵尷奅偑偁傞丅偲偄偆偙偲偱師偺師埵偺尋媶僥乕儅偲偟偰RTK-GPS梡僜僼僩僂僃傾庴怣婡偲偄偆偺偼柺敀偄偐傕抦傟側偄丅
偝偰柧擔偺敪昞帒椏傪嶌傜側偗傟偽偄偗側偄偺偱丄僾儘僌儔儉傪偄偠傞偺偼偙偺埵偵偟偰偍偐側偗傟偽丅
.....................................................................................................................................
揹巕忣曬捠怣妛夛 塅拡丒峲峴僄儗僋僩儘僯僋僗尋媶夛
(SANE), 2008/7/25
僾儘僌儔儉偑up偝傟偨丅尨峞乊愗7/5丅
.....................................................................................................................................
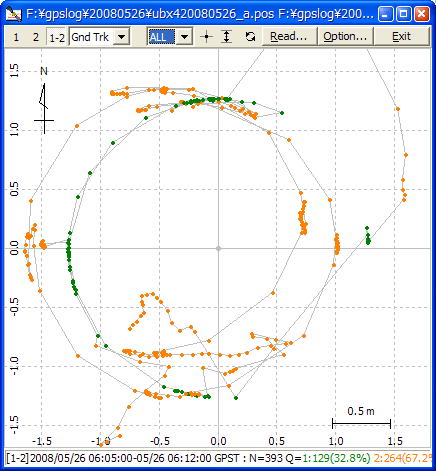
堏摦懱僨乕僞傪庢偭偰偒偨丅1 km埲撪婎慄偱側傞傋偔忋嬻帇奅偺椙偄忦審偱丄1廃攇RTK-GPS偑偳偺掱搙幚梡揑偐傪専徹偡傞偨傔丅儘乕僶偼ANN-MS+AEK-4T, ANN-MS+Crescent丅斾妑偺偨傔GPS-702-GG+OEM-V傕堦弿偵嵹偣偨丅婎弨嬊偼椺偵傛偭偰壆崻忋偺GPS-702-GG+OEMV-3丅SS2傕庢傝偨偐偭偨偺偩偑Windows Vista偱StarView偲偄偆儘僌僜僼僩偑偆傑偔摦嶌偟側偄偨傔偁偒傜傔偨丅1Hz亊7暘偲偄偆抁偄僙僢僔儑儞丅傾儞僥僫偼帺摦幵儖乕僼偵慜屻60cm埵偢偮棧偟偰愝抲偟偨丅RTKLIB偵傛傞RTK-GPS偲摨忦審偺屻張棟夝愅寢壥丅嵍: ANN-MS+AEK-4T, 拞: ANN-MS+Cresent, 塃: GPS-702-GG+OEMV-3 (L1)丅
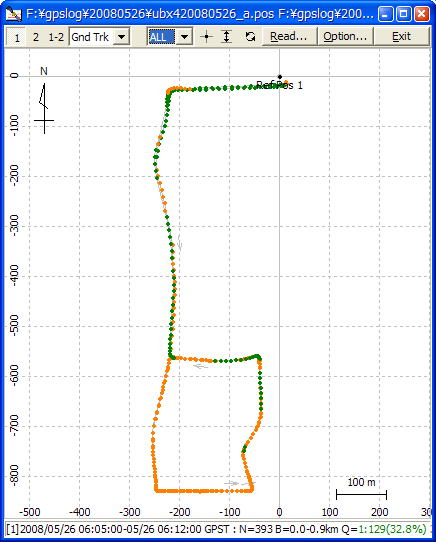
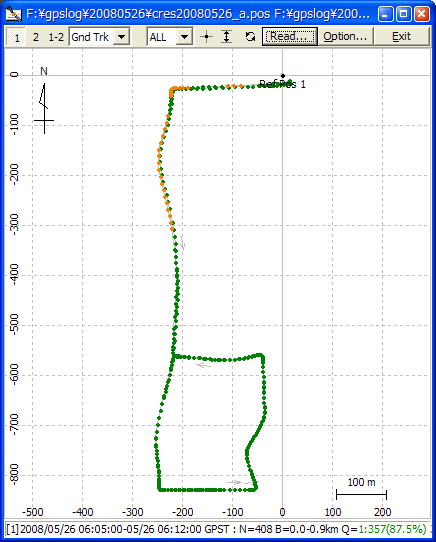
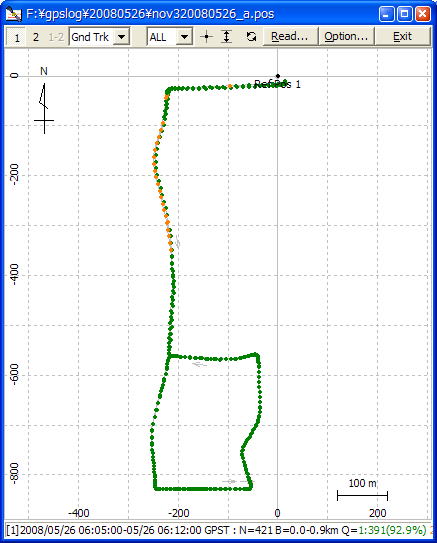
仠: Fix夝丄仠: Float夝
Crescent偺惈擻偑椙偡偓傞偺偩偑丄懠偺僙僢僔儑儞偱偼傕偆彮偟埆偔側傝丄戝懱OEM-V (L1) 偲ublox偺娫埵偵棃傞丅OEMV偺2廃攇屻張棟夝 (FIX棪99.5%) 偲嵎傪庢偭偰傒傞偲Fix夝偑鉟楉偵墌廃忋偵忔偭偰偄傞偺偱儈僗僼傿僢僋僗偼側偄丅(嵍: ANN-MS+AEK-4T, 塃: ANN-MS+Crescent) Crescent偼Float夝傕50cm埲撪偵偼擖偭偰偄傞偙偲偑暘偐傞丅
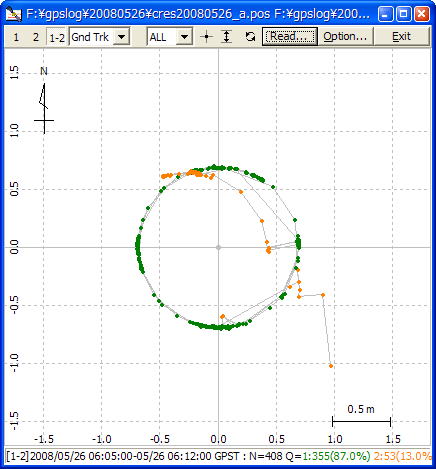
埨掕偟偰忋婰Crescent埵偺惈擻偑弌傟偽1廃攇偺堏摦懱RTK-GPS傕幚梡揑偲尵偊傞偐傕抦傟側偄偑丄偙傫側椙偄忦審偼偦傫側偵側偄丅
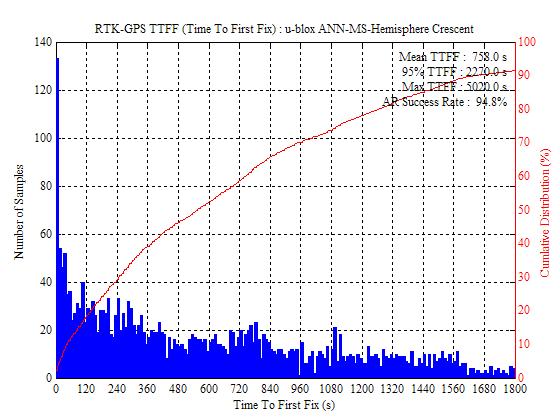
曗懌: 忋婰ANN-MS+Cresent偺慻傒崌傢偣偱偼傎傏弖帪Fix偟Fix棪傕桪廏偱偁傞偑丄應埵奐巒帪娫傪偢傜偟側偑傜24H暘First
Fix偺帪娫傪挷傋偨寢壥偱偼1m婎慄偱傕暯嬒10暘埲忋偐偐偭偰偄傞 (偙傟偼専掕僗儗僢僔儑儖僪偑彮偟尩偟偄)
丅忋婰偼忦審偑偨傑偨傑椙偐偭偨壜擻惈傕崅偄偟楑壙傾儞僥僫+庴怣婡偱偄偮傕埲忋偺傛偆側惈擻偑弌傞栿偱偼側偄丅傾儞僥僫愝抲忬嫷 (偪側傒偵幵偼僗僶儖儔儞僇僗僞乕) 5/27捛婰
.....................................................................................................................................
GPS L1 傾儞僥僫丒庴怣婡昡壙
昡壙寢壥傪傑偲傔偨丅僨乕僞庢摼拞傗枹庢摼偺棑偼崱屻捛壛偡傞丅
(1) RTK-GPS應埵惈擻丄弶婜壔帪娫昡壙偵偼RTKLIB
ver.2.1傪丄偦傟埲奜偺昡壙偵偼僗僋儔僢僠偱奐敪偟偨Matlab儀乕僗偺傾儞僥僫丒庴怣婡摿惈夝愅僜僼僩僂僃傾
(柤徧枹掕) 傪棙梡偟偨丅
(2) EVK-5H (F/W ver.3.00) 偺斃憲攇埵憡娤應抣偑偍偐偟偄尨場偼晄柧偩偑u-blox
5偺F/W偵僶僌偑巆偭偰偄傞壜擻惈偑崅偄偲巚偆丅惗娤應僨乕僞弌椡偼unofficial側婡擻側偺偱偙傟偼偳偆偟傛偆傕側偄丅
(3) 7 km婎慄RTK-GPS惈擻偼嬤椬揹巕婎弨揰偲偺婎慄偵傛傞昡壙寢壥偩偑擔晅偑堎側傞偺偱戝婥忬懺嵎偑尰傟偰偍傝丄昁偢偟傕傾儞僥僫丒庴怣婡惈擻偺嵎偺傒傪昞偟偰偄傞栿偱偼側偄偙偲偵拲堄丅
(4) RTK-GPS弶婜壔帪娫傪尒傞偲SS2傗Crescent傛傝u-blox AEK-4T偺曽偑RTK-GPS偵岦偄偰偄傞偙偲偑暘偐傞丅弶婜壔帪娫偵偼僐乕僪儅儖僠僷僗惈擻偑戝偒偔岠偔偺偱偦傟偑桪廏偩偲偄偆偙偲偱偼側偄偐偲巚偆丅弶婜壔帪娫偵娭偟偰偼1廃攇偲2廃攇偱偼埑搢揑側惈擻嵎偑偁傞偺偱丄崱偺偲偙傠堏摦懱RTK-GPS偵偼2廃攇庴怣婡偑昁恵偲峫偊偰椙偄丅偙傟傪夵慞偡傞傾僀僨傾偼偁傞偑丄楢崌戝夛偵娫偵崌偆偐偳偆偐偼旝柇偱偁傞丅幚偼栘梛偺敪昞帒椏偼傑偩敀巻偱偁傞丅
.....................................................................................................................................
妎彂丅壆崻忋僞乕僎僢僩傾儞僥僫ARP (傾儞僥僫億乕儖忋抂拞墰)
埵抲 丅嬤椬揹巕婎弨揰 (2008/5/1 F2夝屌掕)
24H僗僞僥傿僢僋婎慄夝丅嬄妏儅僗僋10搙丅
35.872980448 138.389665832 1003.7116 (婎弨揰:
0263 彫暎戲 6.9km)
35.872980493 138.389665803 1003.6997 (婎弨揰:
0979 嶳棞崅崻 6.1km)
忋壓偑1cm嫮偢傟偰偄傞丅偙傟偼彮偟戝偒偄婥偑偡傞丅
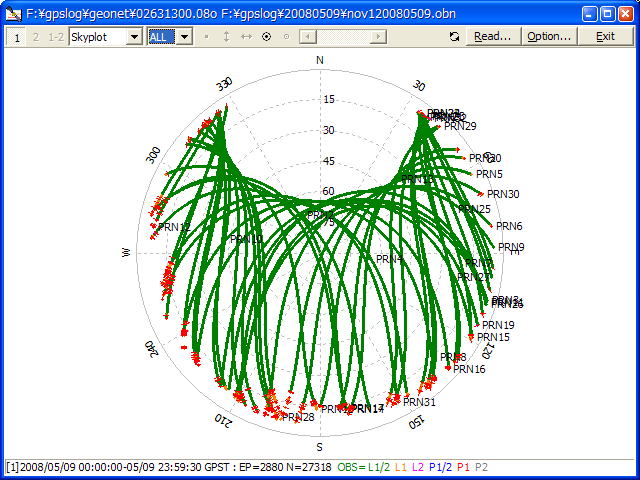
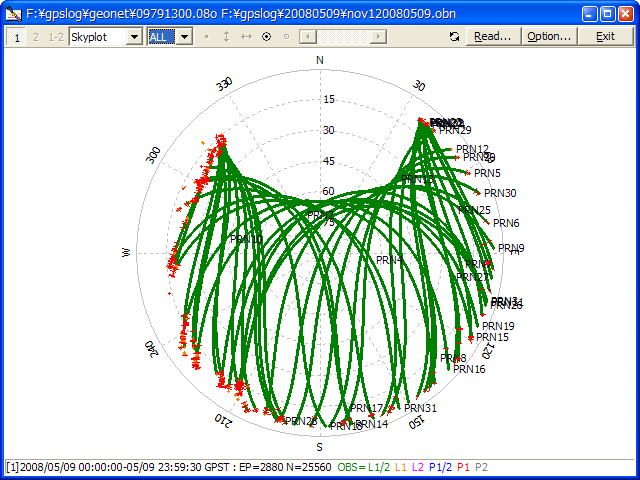
妎彂丅僗僇僀僾儘僢僩丅嵍: 壆崻忋, 拞: 0263, 塃: 0979丅嬤椬揹巕婎弨揰偺忋嬻帇奅偼偁傫傑傝椙偔側偄丅
妎彂丅傾儞僥僫昡壙梡儅僂儞僩: 埵抲娭學丅
妎彂丅GT PPP偵傛傞僞乕僎僢僩傾儞僥僫埵抲悇掕寢壥丅
35.872980785 138.389665924 1003.8528 (24H
Static PPP with IGS Final)
忋婰揹巕婎弨揰婎慄夝斾妑偱E: 0.83cm, N: 3.73cm,
U: 14.12cm丅偙傟偼埵憡拞怱丅埵憡拞怱僆僼僙僢僩:
L1:E:0.03cm N:0.14cm U:6.68cm丄L2:0.01cm
N:0.00cm U:6.61cm (igs05.atx, NOV702GG) 傪壛枴偟偰傕撿杒4cm庛丄忋壓7cm嫮偺嵎偑偁傞丅偙傟偼偪傚偭偲岆嵎偑戝偒偡偓傞丅壗偑栤戣偩傠偆丅
-------------------
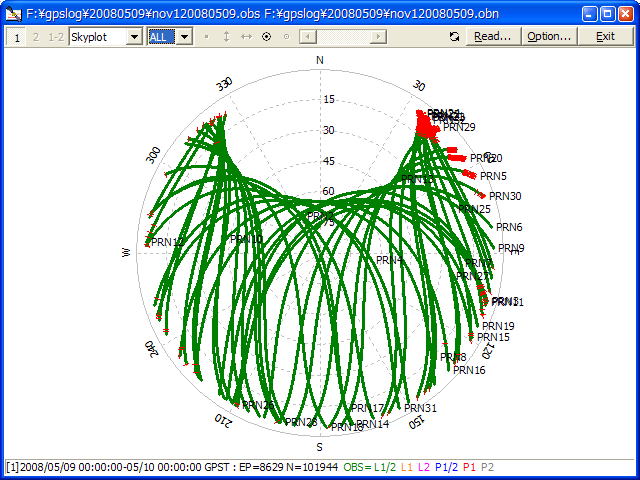
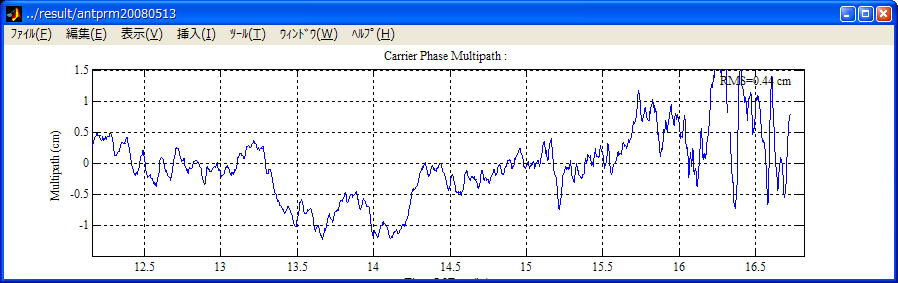
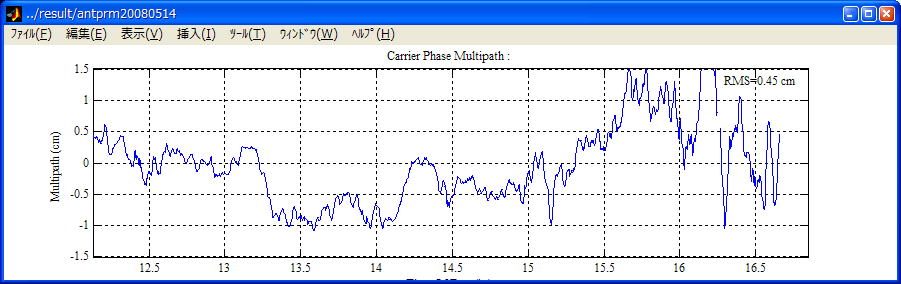
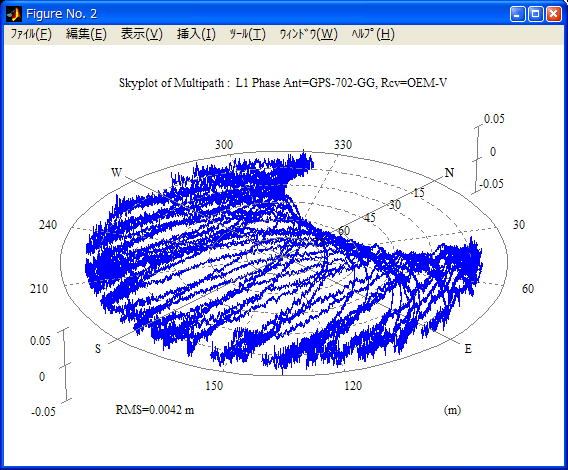
崱夞丄堦廃攇RTK-GPS偺昡壙梡偵傾儞僥僫摿惈夝愅僜僼僩傪奐敪偟偨栿偩偑丄斃憲攇儅儖僠僷僗偑杮摉偵偪傖傫偲悇掕偱偒偰偄傞偐専徹偡傞偺偼寢峔戝曄偱偁傞丅偨偩偙傟偼悢擔暘偺夝愅寢壥傪1峆惎擔偢傜偟偰僗僞僢僋偟偰尒傞偲奣偹妋擣偡傞偙偲偑偱偒傞丅埲壓偼5/13乣5/15偺PRN16 斃憲攇儅儖僠僷僗丅傾儞僥僫偼ANN-MS丄 庴怣婡偼AEK-4T丅庴怣婡嶨壒傪嶍尭偡傞偨傔彮偟僼傿儖僞傪偐偗偰偄傞丅斃憲攇儅儖僠僷僗偼帪掕悢悢10暘 1乣悢cm偺曄摦偲悢暘廃婜 悢mm偺曄摦偑崌惉偝傟偰偄傞偙偲偑暘偐傞丅側偐側偐柺敀偄寢壥偱偼側偄偩傠偆偐丅
.....................................................................................................................................
Garmin GPS 15L偺僶僀僫儕僨乕僞傪僔儕傾儖偱庢傝崬傓嵺偵崅昿搙偱暥帤壔偗偡傞尰徾偑庢傟偢偵帪娫愗傟丅USB-僔儕傾儖曄姺傾僟僾僞偺栤戣偺壜擻惈傕偁傞丅尨場挷嵏偺帪娫偑側偄偺偱Garmin偼屻夞偟丅偪傚偭偲僶僀僫儕傪尒偨斖埻偱偼僋儘僢僋僪儕僼僩傗帪崗僆僼僙僢僩傕戝偒偄偟丄ephemeris偼庢傝弌偣側偄偟丄RTK-GPS偵傑偲傕偵巊偊偦偆側婥偑偟側偄丅傑偁$60偺儌僕儏乕儖側偺偱SS2傗Crescent偲斾妑偟偰傕偐側傝埨偭傐偄嶌傝偱偁傞丅傗偼傝偙偺僋儔僗偼RTK-GPS偵巊偆偺偼偪傚偭偲柍棟偦偆丅
Trimble偑怴偟偔弌偟偨Copernicus II 儌僕儏乕儖偑椙偝偦偆偩側偁丄偲巚偭偰挷傋偰傒偨偺偩偑丄偙傟偼僶僀僫儕弌椡偵偼懳墳偟偰偄傞偑丄媈帡嫍棧偩偗偱斃憲攇埵憡偑弌側偄條偩丅偪傚偭偲巆擮丅
.....................................................................................................................................
怓乆曗惓傪偟偰傗偭偲SS2 (SuperStar II) 偱媈帡嫍棧偲斃憲攇埵憡偺coherency偑偲傟傞條偵側偭偨丅埵憡娤應抣偑coherent偱側偔偰傕憡懳應埵偵偼塭嬁側偄偺偩偗偳丄僉儍儕傾僗儉乕僕儞僌偑弌棃側偄偟丄僐乕僪儅儖僠僷僗悇掕傕擄偟偔側傞偺偱怓乆偲崲傞丅SS2偲Crescent偺僶僀僫儕-RINEX僐儞僶乕僞偑弌棃偨偺偱丄KGPS應埵惈擻傪應傞丅嵍: NovAtel SS2, 塃: Hemisphere Crescent丅傾儞僥僫偼GPS-702-GG丅1m婎慄丄堦廃攇丅婎弨嬊偼GPS-702-GG/OEM-V丅OEM-V偲斾妑偟偰傒傞偲傗偼傝斃憲攇捛旜嶨壒傗斃憲攇儅儖僠僷僗偵娭偟偰偼丄應検媺庴怣婡傕楑壙庴怣婡傕嵎偼側偄偙偲偑暘偐傞丅(SS2傕Crescent傕儂儞僩偺堄枴偱楑壙庴怣婡偐偲尵偊傞偐偲側傞偲旝柇偩偑)丅偁偲Garmin GPS 15L傕昡壙偟偨偄偺偩偑娫偵崌偆偐偳偆偐丅
偝偰丄偙偙傑偱昡壙偟偨斖埻偱1廃攇RTK-GPS梡偍姪傔峔惉傪峫偊偰傒傞丅
傑偢應検媺傾儞僥僫偲楑壙傾儞僥僫偺嵎偼戝偒偄丅GPS-702偺1廃攇斉偑$600埵側偺偱偙傟傪悇彠丅Trimble偺Bullet ($120埵) 偑椙偄偲偺忣曬偑偁偭偨偺偱偙傟偼崱屻昡壙梊掕丅
傾儞僥僫偵斾妑偡傞偲應検媺庴怣婡偲楑壙庴怣婡偺嵎偼彮側偄丅Crescent偼惈擻偼栤戣側偄偟愝寁傕怴偟偄丅偨偩1Hz弌椡偱栺$300偼彮偟崅偄丅崅儗乕僩僆僾僔儑儞傪晅偗傞偲1廃攇應検媺庴怣婡偲嵎偑柍偔側傞丅u-blox
(Antaris 4) 偼嬐偐偵惈擻偑棊偪傞姶偠偩偑10Hz壜偱栺$200丅傑偁栚揑偵墳偠偰偳偪傜偐傪慖傋偽傛偄丅SS2偼偁傑傝偵愝寁偑屆偄丅u-blox
5 (v.3.00) 偼崱偺偲偙傠傑偲傕側KGPS夝偑摼傜傟側偄
(懡暘F/W僶僌)丅Garmin偼傑偩偪傖傫偲昡壙偟偰偄側偄偑Half
cycle ambiguity偺栤戣偑巆偭偰偄傞偺偱RTK-GPS偵偼巊偄偵偔偄丅側偍摉偨傝慜偩偑楑壙庴怣婡偵偼晛捠RTK-GPS偺F/W偼娷傑傟偰偄側偄偺偱
(Crescent偵偼僆僾僔儑儞偑偁傞) 偙傟偼奜晹張棟偡傞昁梫偑偁傞丅楑壙1廃攇庴怣婡梡RTK-GPS傾僟僾僞傪$500埵偱弌偣偽攧傟傞偐傕偟傟側偄丅
.....................................................................................................................................
嫗搒戝妛杊嵭尋媶強懠, 崅僒儞僾儕儞僌GPS偱懆偊偨2008擭5寧12擔拞崙丒巐愳徣偺抧恔攇宍
(戞1曬)
1Hz 僉僱儅僥傿僢僋PPP偱懆偊偨巐愳戝抧恔偺抧恔攇丅夝愅偵偼GT0.6.3傪巊梡偟1Hz塹惎帪寁傪悇掕偟偰偄傞丅偐側傝戝偒側抧恔偩偭偨偺偱搶惣5-6cm偺昞柺攇偑擣傔傜傟傞偑丄摿偵忋壓惉暘偵嶨壒偑懡偔夝愅庤朄偲偟偰壽戣偑巆偭偰偄傞丅PPP偱惍悢僶僀傾僗偑夝偗傞傛偆偵側傞偲搶惣曽岦偺嶨壒偼傕偆彮偟嶍尭偱偒傞偲巚偆丅
-------------------
SuperStar II偺庴怣婡僶僀僫儕曄姺偱浧傞丅栤戣偼怓乆偁傞偺偩偑丄僶僀僫儕宍幃愝寁偑埆偄偺偲F/W偑傾儂偱撪晹寁應抣傪偦偺傑傑弌椡偡傞偺偱曗惓偟側偄偲偪傖傫偲偟偨娤應抣偵側傜側偄丅曗惓曽朄偑儅僯儏傾儖偵彂偐傟偰偄傞偺偩偑丄岆怉偑懡偄偟擄夝偱壗搙撉傒曉偟偰傕撪梕偑棟夝偱偒側偄丅懡暘愝寁偑屆偡偓傞偺偩傠偆丅偦傟偵斾傋傞偲愝寁偺怴偟偄ublox傗Hemisphere偼戝曄慺捈側幚憰偱偁傞丅
.....................................................................................................................................
J.Ray et al., Overview of IGS Products & Analysis Center
Modeling, IGS 2008 Workshop, 2008
棃寧峴傢傟傞IGS AC Workshop偺帒椏偑up偝傟偰偄傞丅IGS
奺夝愅僙儞僞偱巊傢傟偰偄傞夝愅儌僨儖偑堦棗昞偱傑偲傔傜傟偰偍傝暘偐傝傗偡偄丅
偣偭偐偔側偺偱偙偺昞偵崌傢偣偰GT偺夝愅儌僨儖傪埲壓偵傑偲傔偰偍偔丅偲偄偭偰傕儖乕僠儞夝愅傪峴偭偰偄傞栿偱偼側偄偺偱3擭慜偵GPS塹惎婳摴/帪寁寛掕傪峴偭偨嵺偺GT0.5.5偺愝掕偱偁傞丅偝偡偑偵嵟怴偺夝愅愴棯偵斾妑偡傞偲屆偝偼塀偟偒傟側偄丅(側偍GT0.5.5偐傜GT0.6.3傊偺儌僨儖夵椙偼丄GMF傗ANTEX傾儞僥僫儌僨儖傪擖傟偨偔傜偄偱丄偨偄偟偨嵎偼側偄)
| ANALYSIS CENTER |
OBS TYPE | ORBIT DATA ARC LENGTH |
DATA RATE |
ELEVATION CUTOFF |
ELEVATION INVERSE WGTS |
|
| GT0.5.5 | UnDiff | 24+24+24h | 5 min | 10 deg | 冃2*(1+f (1/sin2(e)-1)) |
| ANALYSIS CENTER |
SOLID EARTH |
EARTH POLE |
OCEAN LOAD |
OCEAN POLE |
OCEAN CMC |
SUBDAILY EOPs |
| GT0.5.5 | IERS 1996 | IERS 1996 | NAO.99b w/ 11 terms |
none | ? | IERS 1996 |
| ANALYSIS CENTER |
GRAVITY FIELD |
EARH TIDES |
EARTH POLE |
OCEAN TIDES |
OCEAN POLE |
RELATIVITY EFFECTS |
| GT0.5.5 | JGM3; C21/S21 due to PM |
IERS 1996 | IERS 1996 | CSR 2.0 | none | no dynamic corr; bending applied? |
| ANALYSIS CENTER |
NUTATION & EOPs |
SRP PARAMS |
VELOCITY BRKs |
ATTITUDE | SHADOW ZONES |
EARTH ALBEDO |
| GT0.5.5 | IAU1980; BuB ERPs |
D, Y, B, Z scales |
none | none | E: umbra & penumbra M: umbra |
none |
| ANALYSIS CENTER |
METEO DATA |
ZENITH DELAY |
MAPPING FNCT |
GRAD MODEL |
ZENITH PARAMS |
GRAD PARAMS |
| GT0.5.5 | none | Saastamoinen dry |
NMF dry + wet |
none | 5-min stochastic ZTD |
5-min stochastic |
.....................................................................................................................................
擔杮抧媴榝惎壢妛楢崌2008擭戝夛, D106 應抧妛堦斒
楢崌戝夛偺梊峞廤偑岞奐偝傟偨丅GT0.6.3傪巊偭偨桳塿側惉壥傪偄偔偮偐敪昞偟偰偄偨偩偗傞傛偆偱桳傝擄偄偙偲偱偁傞丅GT0.6.4傊偺僶乕僕儑儞傾僢僾偲摨帪偵GT徯夘榑暥傪偪傖傫偲偟偨榑暥帍偵搳峞偟偨偄丅嵟嬤GT偵娭偟偰奜崙偐傜栤偄崌傢偣偑棃傞條偵側偭偰偒偨偺偱document偺塸岅壔傕偟偨偄側偁丅
-------------------
媣偟傇傝偵GT偺僒億乕僩忣曬峏怴丅側傞傋偔憗偔懳墳偡傋偒壽戣偑偨傑偭偰偒偨偺偱丄壞偖傜偄傑偱偵儅僀僫僶乕僕儑儞傾僢僾 (ver.0.6.4) 偺梊掕丅
-------------------
楢崌戝夛岦偗楑壙堦廃攇庴怣婡昡壙懕偒丅僴乕僼僺僢僠僐僱僋僞偑庤偵擖傜側偄偺偱Hemisphere Crescent庴怣婡偵捈愙僴儞僟晅偟嬻拞攝慄偱USB-僔儕傾儖傾僟僾僞偵宷偄偱僨乕僞庢摼丅梋桾偑偱偒偨傜奺庴怣婡傪偪傖傫偲働乕僗偵擖傟偰偁偘偨偄丅偁偲庴怣婡僶僀僫儕曄姺僐乕僪傪僔僐僔僐偲彂偔丅

.....................................................................................................................................
僯僐儞丒僩儕儞僽儖, GPS傾儞僥僫愝寁偲惈擻偺恑曕: Trimble Zephayr
Trimble偺Zephayr傾儞僥僫偺愰揱帒椏側偺偩偑丄崅惈擻應検媺傾儞僥僫偺摿惈偵偮偄偰暘偐傝傗偡偄夝愢偑娷傑傟偰偄傞丅偙傟傪尒傞尷傝丄僠儑乕僋儕儞僌傾儞僥僫偲偺斾妑偱丄埵憡拞怱埨掕惈偲塹惎曔懆惈擻偺揰偱偼Zephayr傾儞僥僫偑丄儅儖僠僷僗摿惈偱偼僠儑乕僋儕儞僌傾儞僥僫偑桪傟偰偄傞偙偲偑暘偐傞丅偝偰NovAtel
GPS-702-GG傾儞僥僫偱偁傞偑丄帡偨傛偆側忦審偺寁應偱媈帡嫍棧儅儖僠僷僗偑0.27m (L1)丄婎慄夝昗弨曃嵎偑E 0.26cm, N 0.36cm, U 0.77cm偱偁傝丄Trimble
Zephayr/Zephayr Geodetic傾儞僥僫偲杦偳摨摍偺惈擻傪桳偟偰偄傞偙偲偑妋擣偱偒傞丅
側偍僠儑乕僋儕儞僌傾儞僥僫偼婎弨嬊梡屌掕傾儞僥僫偲偟偰偼桪廏偩偑丄堦斒偵嬄妏偵埶懚偟偰埵憡拞怱偑摦偔偟丄L1/L2娫嵎傕戝偒偄偺偱丄傾儞僥僫偑僥傿儖僩偡傞壜擻惈偑偁傞堏摦懱偱偼曗惓偺偨傔偳偆偟偰傕巔惃寁應偑昁梫偵側傝巊偄偵偔偄丅偙偺揰GPS-702-GG傗Zephayr偺條側"zero-offset"宆傾儞僥僫偼巔惃寁應偺昁梫偑側偄偺偼戝偒側儊儕僢僩偲側傞丅
.....................................................................................................................................
怴偟偄CODE 5s僋儘僢僋傪帋偟偰傒偨丅2008/4/27 6:00-9:00 IGS USUD嬊僨乕僞傪巊偭偨GT0.6.3偵傛傞1Hz僉僱儅僥傿僢僋PPP寢壥丅嵍: CODE 5s僋儘僢僋丄塃: IGS 30s僋儘僢僋丅曗娫岆嵎偵婲場偡傞崅廃攇嶨壒偺揰偱嵎偑側偄偙偲偼柍偄偺偩偗偳丄偦傟埲奜偺嶨壒惉暘偑寢峔戝偒偄偺偱寢嬊5s僋儘僢僋偺桳岠惈偑偳傟掱偁傞偐偼偪傚偭偲旝柇側偲偙傠偱偁傞丅
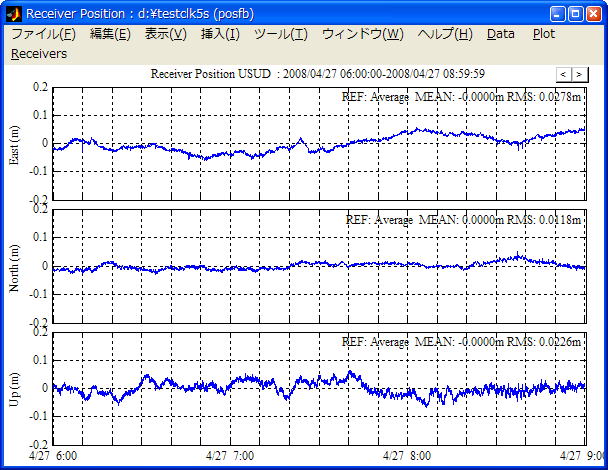
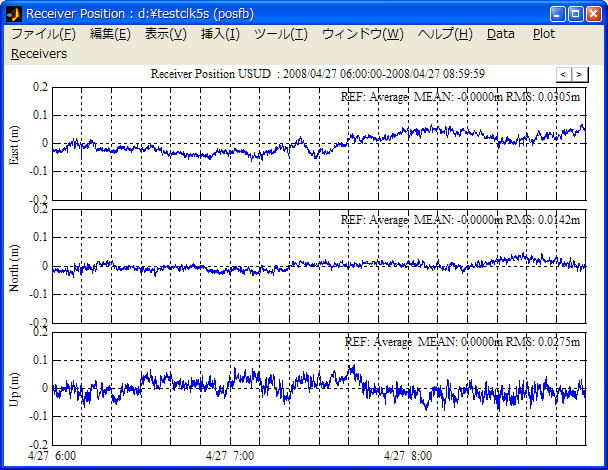
側偍GT0.6.3偱CODE 5s僋儘僢僋傗IGS 30s僋儘僢僋傪1Hz PPP偵巊偆偨傔偵偼丄僋儘僢僋僼傽僀儖柤傪COD14770.CLK_05S 仺 COD14770.CLK丄igs14770.clk_30s 仺 igs14770.clk偺條偵儕僱乕儉偟偰偐傜丄"Estimated/Fixed Parameter"愝掕偱巊梡僋儘僢僋偲偟偰CODE傑偨偼IGS Final傪巜掕偟丄Interp Clock=ON偲偟偰壓偝偄丅
.....................................................................................................................................
S.Schaer,
[IGSMAIL-5771]: Model change made at CODE, 14 May 2008
CODE偺夝愅梡寁嶼婡峏怴偲偦傟偵敽偆夝愅愴棯偺曄峏捠抦丅僾儘僟僋僩偲偟偰5s娫妘偺崅懍塹惎帪寁悇掕抣
偑捛壛偝傟偨傛偆偩丅偙偺CODE 5s僋儘僢僋傪巊偊偽帪寁曗娫岆嵎傪傎傏柍帇偱偒傞偼偢偱偁傝丄僉僱儅僥
傿僢僋PPP偵傛傞崅懍曄摦寁應偺墳梡偑傛傝恑傓偲巚傢傟傞丅傑偁抶偡偓偨偔傜偄偲巚傢側偄偙偲傕側偄丅
1擔暘偺埑弅僼傽僀儖偱6MB嫮丄夝搥嵪偱35MB傕偁傞偺偱庢傝埖偄偑偪傚偭偲傗偭偐偄丅RINEX
CLK EXT宍幃
偼崅懍帪寁梡偵偼偁傑傝偵奿擺岠棪偑埆偄偺偱揔摉側僶僀僫儕宍幃偱採嫙偟偰偔傟傞偲椙偄偺偩偑丅
.....................................................................................................................................
M.Ge et al., Resolution of GPS carrier-phase ambiguity
in precise point positioning, EGU Assembly, 2007
11/2偵徯夘偟偨PPP AR尋媶偺敪昞帒椏丅偙偪傜偺曽偑榑暥傛傝暘偐傝傗偡偄丅悇掕UPD (Uncaliblated Phase Delay) 傪巊偭偨PPP惛搙昡壙寢壥偑偁傞丅24H PPP夝偱E-W
Repeatability偑30%夵慞丄1H PPP夝偱惛搙偑RMS 4-6cm仺1cm偵戝暆偵夵慞偝傟偰偄傞丅僫儘乕儗乕儞UPD偑悢cm僆乕僟乕偱帪娫曄摦偟偰偄傞偺偩偑偙傟偼IGS婳摴丒帪寁岆嵎偺偣偄偐傕偟傟側偄偲偟偰偄傞丅
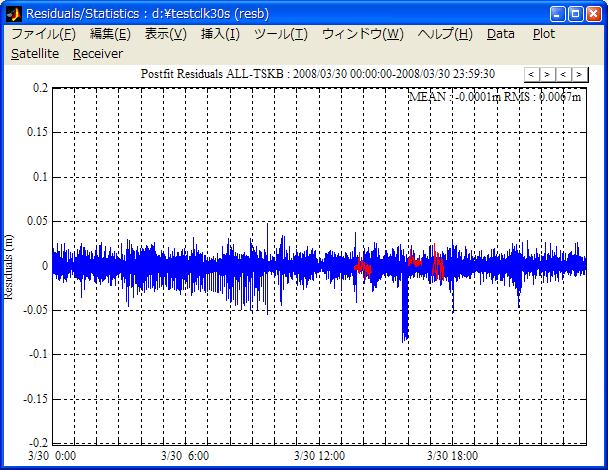
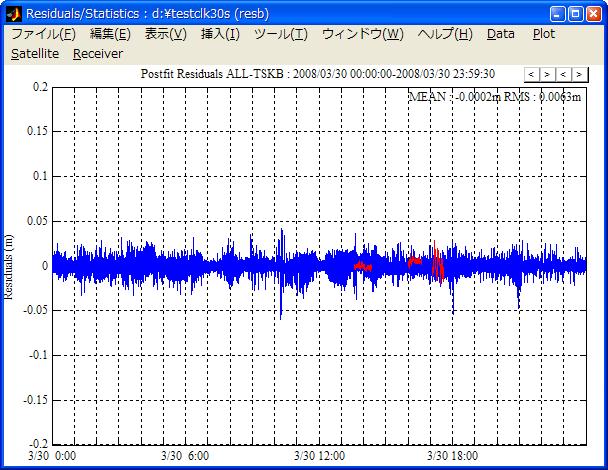
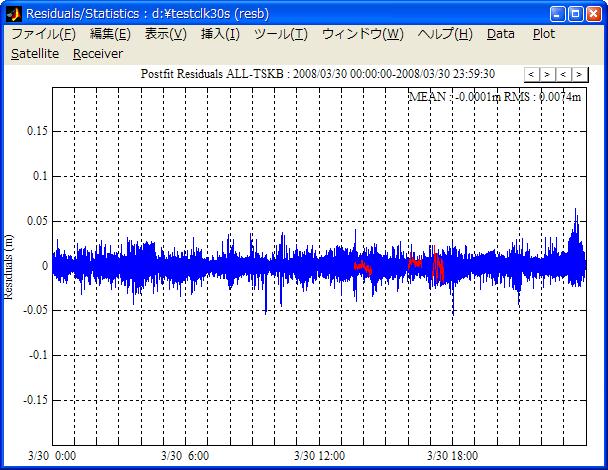
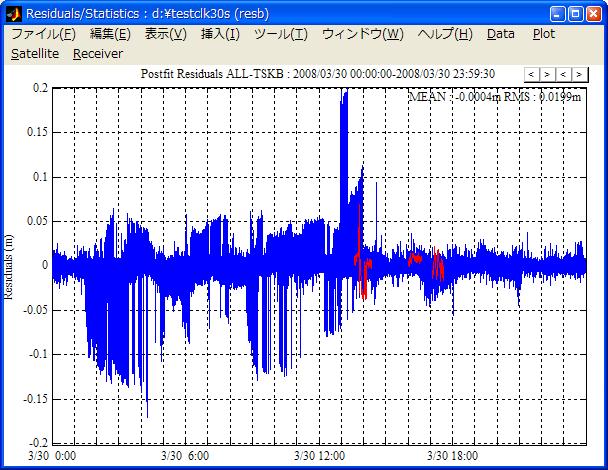
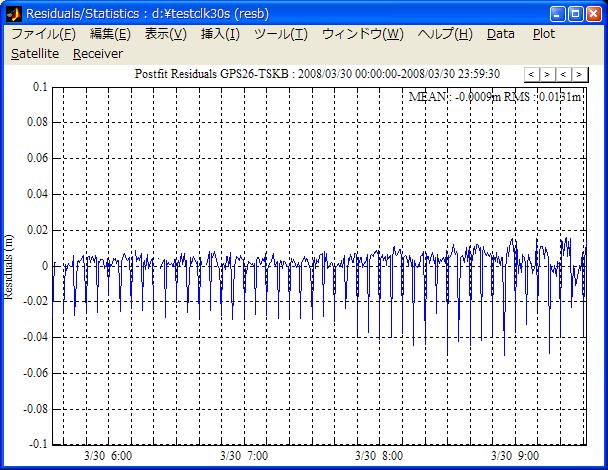
尰峴IGS Final偼丄24H僗僞僥傿僢僋PPP梡偵偼奣偹廫暘側昳幙傪帩偭偰偄傞偲尵偊傞偑丄抁僙僢僔儑儞PPP丄傑偟偰傗僉僱儅僥傿僢僋 PPP梡偵偼昁偢偟傕廫暘側昳幙傪帩偭偰偄傞偲偼尵偊側偄丅摿偵塹惎帪寁偼傑偩怓乆側栤戣丄椺偊偽day boundary晄楢懕丄怘塹惎偺昳幙丄悇掕抣寚懝摍丄傪書偊偰偄傞丅摿偵僉僱儅僥傿僢僋PPP梡偲偟偰2006/12偵採嫙奐巒偟偨IGS 30s塹惎帪寁偼傑偩昳幙栤戣偑懡偄條偱丄偄傑偺偲偙傠僉僱儅僥傿僢僋PPP梡偵偼CODE傪巊偭偨曽偑椙偄偲巚偆丅嶲峫傑偱偵30s帪寁昳幙傪夝愅偟偨寢壥傪揬偭偰偍偔丅GT0.6.3偲IGS, CODE, NRCan, MIT偺30s帪寁傪巊偭偰30s娫妘24H PPP巆嵎傪弌椡偝偣偨丅僨乕僞偼2008/3/30偺TKSB丅IGS 30s (嵍忋)丄CODE (塃忋)丄NRCan (嵍拞)丄MIT (塃拞)丅婳摴偼IGS媦傃奺AC夝傪巊梡偟丄慡塹惎暘巆嵎傪僗僞僢僋偟偰偄傞丅MIT楋偺昳幙偑崜偄丅堦斣壓偼IGS 30s PRN26偺傒偺巆嵎奼戝恾丅300s娫妘抣偲偦偺懠偵悢cm掱搙偺晄惍崌偑惗偠偰偄傞偙偲偑暘偐傞丅懡暘嵟廔帪寁夝偺暪崌傾儖僑儕僘儉偵栤戣偑巆偭偰偄傞偺偱偼側偄偐偲巚偆丅側偍棟桼偼椙偔抦傜側偄偑丄JPL偼尰嵼婛偵30s帪寁偺採嫙傪掆巭偟偰偄傞丅
.....................................................................................................................................
嶐擔up偟偨傾儞僥僫摿惈夝愅寢壥傪嵞搙僠僃僢僋偟偰偄傞偺偩偑丄堎忢僨乕僞偵堷偭挘傜傟偰堎忢抣偑尰傟偰偄傞傜偟偄寢壥偑偄偔偮偐偱尒傜傟傞丅傕偆彮偟QC傪偪傖傫偲擖傟偨曽偑椙偄偐傕偟傟側偄丅摿偵L1傾儞僥僫偱偺僗儕僢僾専弌偼寢峔擸傑偟偄偲偙傠偱丄崱偼庴怣婡偺儘僢僋僼儔僌
(LLI) 傪尒偰偄傞偩偗偩偑丄庴怣婡偵傛偭偰偼偙傟偼偁傑傝怣棅惈偑崅偔側偄丅傕偭偲傛偄庤朄偑偁傟偽椙偄偺偩偑丅側偍NovAtel偼帪寁傪楢懕揑偵僗僥傾儕儞僌偡傞僞僀僾偺庴怣婡側偺偱庴怣婡帪寁偺儔儞僟儉曄摦惉暘偑戝偒偔帪娫嵎傪巊偆夝愅偱偼巊偄偵偔偄丅掕婜揑偵帪寁偑旘傇庴怣婡偼偦傟偱傑偨暿偺栤戣偑偁傞栿偩偑偙偺揰偱偼巊偄傗偡偔僗儕僢僾専弌傕梕堈偱偁傞丅杮奿揑側夝愅偵偼儖價僕僂儉偑梸偟偄強偱偁傞丅
偲偙傠偱嵟嬤偼僆乕僨傿僆梡儅僗僞乕僋儘僢僋偵OCXO傗尨巕帪寁傪巊偆偙偲偑桳傞傛偆偱丄崅媺僆乕僨傿僆梡儖價僕僂儉婎弨怣崋敪怣婍傕敪攧偝傟偰偄傞丅僱僢僩専嶕偡傞偲僂儞愮枩偺僙僔僂儉尨巕帪寁傪巊偭偨傜惁偄壒偑暦偙偊偨偲偐偄偆姶憐偑嵹偭偰偄偨傝偡傞丅僆乕僨傿僆儅僯傾偼杮摉偵10^-11偲偐偺嵎偑暦偒暘偗傜傟傞偺偩傠偆偐丅偪傚偭偲怣偠傜傟側偄丅壒偵岠偔偼偢偺抁婜曄摦偼僙僔僂儉傛傝儖價僕僂儉偺曽偑椙偄偼偢偱偼側偄偐丄偲傕巚偭偨傝偡傞丅傑偁僂儞10枩偺働乕僽儖傪偲偭偐偊傂偭偐偊偟偰墄偵擖傞條側恖偨偪偑戲嶳偄傞僆乕僨傿僆儅僯傾偺悽奅偼杦偳廆嫵傒偨偄側傕偺偱偁傞丅
.....................................................................................................................................
偲傝偁偊偢楑壙堦廃攇RTK-GPS偺婎慴僨乕僞偲偟偰傾儞僥僫偺昡壙寢壥傪傑偲傔偨丅傑偩崱屻怓乆偲峏怴偡傞梊掕丅
-------------------
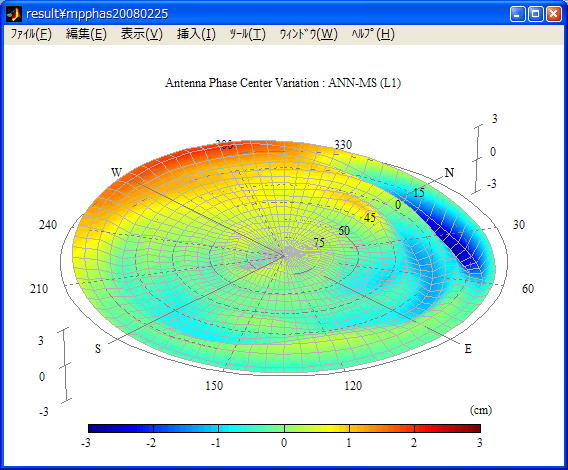
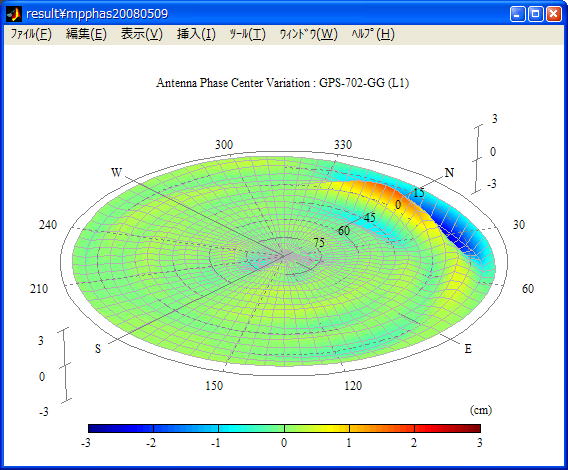
傾儞僥僫摿惈夝愅懕偒丅傗偭偲傾儞僥僫埵憡拞怱曄摦 (PCV) 偑悇掕弌棃傞傛偆偵側偭偨丅彫宆僷僢僠u-blox ANN-MS (嵍)偲NovAtel GPS-702-GG (嵍) 偺PCV悇掕抣丅婎弨傾儞僥僫傕GPS-702-GG丅5/7偵彂偄偨傛偆偵庡側應検梡傾儞僥僫偺愨懳専掕抣偼擖庤偱偒傞偺偱屄懱嵎傗娐嫬嵎傪柍帇偡傟偽偦傟傜傾儞僥僫婎弨偱愨懳抣傪媮傔傞偙偲偑偱偒傞丅婎慄夝愅偱偄偭偨傫埵憡拞怱傪寛掕偟偰偐傜丄埵憡拞怱傪屌掕偟偰嵞搙僇儖儅儞僼傿儖僞偱埵憡拞怱曄摦検傪媴柺挷榓娭悢學悢偲偟偰媮傔偰偄傞丅師悢偼傾儞僥僫専掕偱昗弨揑偵巊傢傟傞10奒5師偲偟偨丅24H暘偺幚娤應僨乕僞傪巊偭偰偄傞偺偱杒懁偺僨乕僞寚懝堟偺抣偑惓忢偵媮傔傜傟側偄丅傾儞僥僫傪180搙悈暯夞揮偟偰庢摼偟偨娤應僨乕僞傕巊偊偽夵慞偝傟傞偼偢偩偑偪傚偭偲帪娫偑側偄偺偱偙傟偼偁偒傜傔傞丅Bernese傪巊偊偽梕堈偵悇掕偱偒傞偼偢偱偁傞偑儅儖僠僷僗傕摨帪偵媮傔偨偄偙偲傕偁傝寢嬊夝愅僾儘僌儔儉傪僗僋儔僢僠偱彂偄偰偟傑偭偨丅
妋偐偵楑壙傾儞僥僫偺埵憡拞怱摿惈偼埆偄傢偗偩偑丄巚偭偰偄偨傎偳埆偄傢偗偱偼側偄丅僐乕僪儅儖僠僷僗懴惈偑戝偒偔曽埵妏埶懚惈偺彫偝偄傾儞僥僫傪慖掕偡傟偽RTK-GPS偵傕巊偊側偄偙偲偼側偄偺偱偼側偄偐偲巚偆丅
.....................................................................................................................................
崅恵懠, 堏摦懱岦偗峀堟宆僱僢僩儚乕僋RTK僔僗僥儉偺専摙, 揹巕忣曬捠怣妛夛 塅拡丒峲峴僄儗僋僩儘僯僋僗尋媶夛
(SANE) (敪昞怽崬), 2008
峀堟僱僢僩儚乕僋RTK娭楢敪昞怽崬傒丅偲傝偁偊偢偙傟偼婘忋専摙偺傒丅撪梕傪恑傔偰11寧偺塅拡壢妛楢崌島墘夛偵傕怽偟崬傓偮傕傝
(懡暘弨揤捀塹惎僙僢僔儑儞) 丅
.....................................................................................................................................
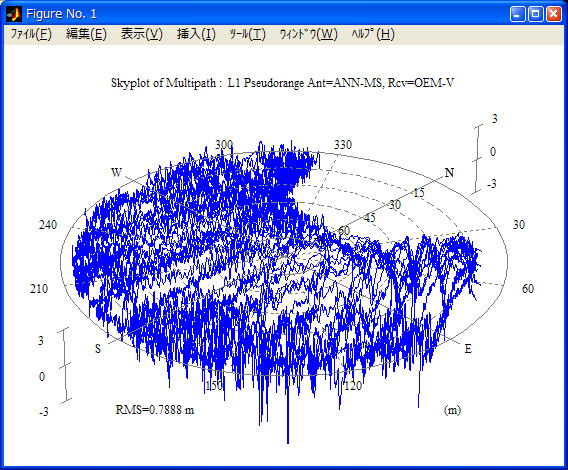
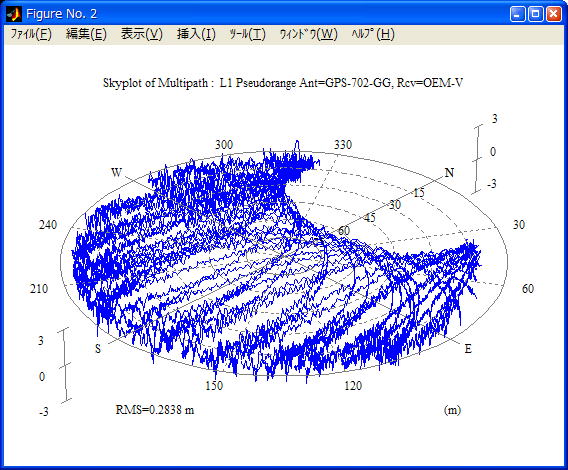
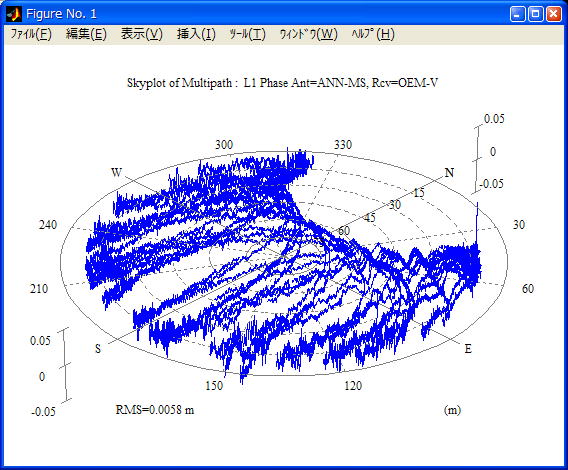
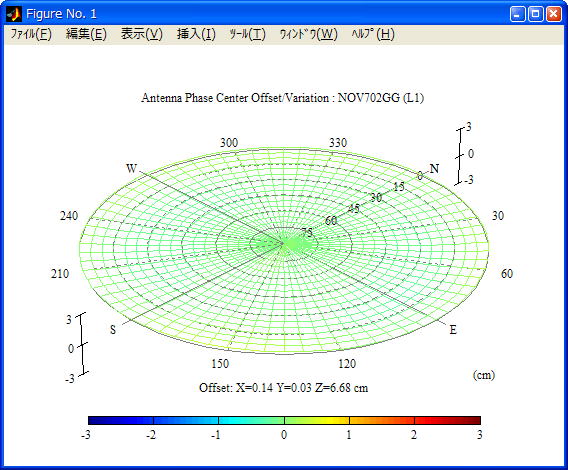
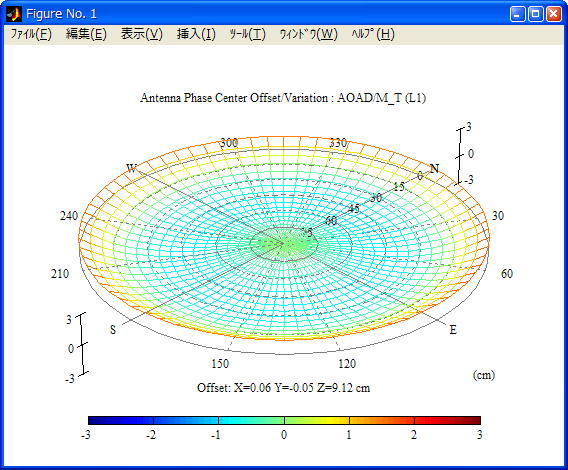
傾儞僥僫摿惈偺夝愅丅楢崌戝夛岦偗丅彫宆僷僢僠u-blox ANN-MS (嵍) 偲NovAtel GPS-702-GG (塃) 偺斾妑丅24H暘偺幚娤應僨乕僞偐傜拪弌偟偰偄傞丅忋偑僐乕僪儅儖僠僷僗丄壓偑斃憲攇埵憡儅儖僠僷僗丅斃憲攇埵憡儅儖僠僷僗偼婎弨嬊傾儞僥僫 (GPS-702-GG) 憡懳抣偱丄婎慄夝愅巆嵎側偺偱庴怣婡嶨壒傕壛嶼偝傟偨抣偱偁傞丅庴怣婡偼慡偰NovAtel OEM-V丅ANN-MS偼21cm兂偺僌儔儞僪僾儗乕儞晅丅
-------------------
Wired Vision, 2008擭壱摥傪栚巜偡墷廈斉GPS乽僈儕儗僆乿丄崱屻偺壽戣偼, 2004/6/22
悘暘屆偄Galileo偺婰帠傪尒偮偗偨偺偱揬偭偰偍偔丅尰嵼偼忬嫷偑曄傢偭偰偄傞晹暘偑懡偄偺偱拲堄丅乽PRS偼GPS偲偼傑偭偨偔暿偺廃攇悢懷偵堏偝傟傞偙偲偵側偭偨丅乿偲偁傞丅偪傚偭偲挷傋偰傒傞偲PRS偼Galileo
E1-A偲E6-A懷偱採嫙偝傟傞傜偟偄丅Galileo E1-A懷偲GPS
M-Code偼廃攇悢僗儁僋僩儔儉偑僆乕僶儔僢僾偟偰偄傞偺偱丄傕偟偐偡傞偲傑偩嵟廔挷惍偑偮偄偰偄側偄偺偐傕偟傟側偄丅Gailileo
PRS偵偮偄偰嫽枴偑弌偰偒偨偺偱偪傚偭偲専嶕丅
A.Kendall et al., Say "Hello" to Galileo's PRS, Inside GNSS, 2007
側偤PRS偑昁梫偐偺椙偄夝愢丅偙傟傪撉傓偲塹惎應埵媄弍傪埇傞偙偲偑傕偼傗埨慡曐忈偺庱崻偭偙傪墴偝偊傞偙偲偵側偭偰偄傞尰幚偵婥晅偔丅偦偟偰EU偑丄價僕僱僗偲偟偰偼惉棫偟側偔偰傕丄嫄妟側梊嶼傪巊偭偰Gailieo寁夋傪悇恑偟傛偆偲偟偰偄傞堄恾偑棟夝偱偒傞丅
.....................................................................................................................................
崱RTK昡壙梡偺婎弨傾儞僥僫偲偟偰巊偭偰偄傞NovAtel GPS-702-GG偼埵憡拞怱曄摦 (PCV) 偺柺偐傜偼桪廏側傾儞僥僫偱偁傞丅PCV僌儔僼偑昤偗傞傛偆偵側偭偨偺偱GPS-702-GG (嵍)偲昗弨揑側僠儑乕僋儕儞僌宆傾儞僥僫 (塃) 偲偺斾妑傪埲壓偵帵偟偰偍偔丅PCV僨乕僞偼嵟怴偺IGS愨懳傾儞僥僫儌僨儖 (igs05_1473.atx) 偐傜庢偭偨丅
.....................................................................................................................................
T.Hobiger et al., Ray-traced troposphere slant delays for precise
point positioning, Earth Planets Space, 2008
婥徾挕悢抣梊曬儌僨儖偲儗僀僩儗乕僔儞僌偵傛傝嶼弌偟偨懳棳寳抶墑偵傛傞PPP應埵惛搙偺昡壙丅儗僀僩儗乕僔儞僌偵偼NICT偱奐敪偟偨KARAT偲屇傇僣乕儖傪丄PPP偵偼GT0.6.3傪棙梡偟偰偄傞丅 KARAT+懳棳寳residual悇掕偺忦審偱丄悢抣梊曬儌僨儖傪巊傢側偄昗弨揑PPP偲斾妑偟偰庒姳偺repeatability夵慞偑尒傜傟偨偲偟偰偄傞丅慜偵彮偟彂偄偨偑丄尰峴偺婥徾挕悢抣梊曬儌僨儖偵偼傑偩GEONET壜崀悈検偑摑崌偝傟偰偄側偄偺偱悈忲婥検娤應僨乕僞偺僜乕僗偑朙晉側栿偱偼側偄丅廬偭偰悢抣梊曬儌僨儖偺傒偱偼傓偟傠惛搙偑棊偪傞寢壥偵側偭偰偄傞偑丄偙傟偼崱屻夵慞偝傟傞偼偢偱偁傞丅悢抣梊曬儌僨儖偺摫擖偼僉僱儅僥傿僢僋PPP忦審偱傛傝岠壥揑偵摥偔偺偱偼側偄偐偲巚偆
-------------------
N.A.Carlson, Federated square root filter for decentralized
parallel processors, Aerospace and Electronic Systems, IEEE
Transactions on, 1990
Google Scholar偱180埲忋堷梡偑晅偄偰偄傞偺偱丄Federated
Kalman Filter偵娭偡傞僆儕僕僫儖榑暥偺條丅$35栫丅Kalman
Filter傕奼挘偑怓乆偲偁偭偰惓捈壗偑側傫偩偐傛偔暘偐傜側偄丅偪傚偭偲栚揑偼堘偆偑嵟嬤偩偲Unscented Kalman Filter偲偐Particle Filter偲偐偼GPS偺悽奅偱傕寢峔 (尋媶儗儀儖偱偼)
巊傢傟偰偄傞傛偆偩丅Kalman Filter偺婎慴偐傜嵟嬤偺奺庬奼挘傑偱堦棗偱傑偲傑偭偰偄傞椙偄夝愢彂偼側偄偩傠偆偐丅
-------------------
G.Wubbena et al., RTK Networks based on Geo++ GNSMART - Concepts,
Implementation, Results, ION GPS 2001
G.Wubbena et al., PPP-RTK: Precise Point Positioning Using
State-Space Representation in RTK Network, ION GNSS 2005
偙偙偺偲偙傠Trimble幮娭楢偺榑暥偟偐庢傝忋偘偰偄側偄偺偱堦墳Geo++幮偺僱僢僩儚乕僋RTK娭楢偺榑暥儕儞僋傪揬偭偰偍偔丅懡暘椉幰偲傕婛偵揬偭偰偄傞偼偢丅忋偼Geo++
GNSMART偺張棟庤朄丄壓偼SSR傪巊偭偨峀堟僱僢僩儚乕僋RTK
(偲偄偆偐AR晅儕傾儖僞僀儉PPP) 偺僐儞僙僾僩採埬丄椉幰偲傕媄弍揑徻嵶偼彮側偔撪梕偼傛偔暘偐傜側偄揰偑懡偄丅
.....................................................................................................................................
4/29偵Trimble GPSNet偱嵦梡偝傟偰偄傞僱僢僩儚乕僋RTK曗惓忣曬惗惉偵娭偡傞榑暥傪庢傝忋偘偨偑丄嵞搙彮偟嵶偐偔撉傫偱傒偨丅
傑偢Vollath (2004) 偱偼"FAMCAR"偲屇傇暘妱僼傿儖僞庤朄偵偮偄偰弎傋偰偄傞丅榑暥偦偺傕偺偼US
Pat. App偺僒儅儕偲偄偆姶偠偱徻嵶偼椙偔暘偐傜側偄偺偱嵶偐偔偼US
Pat. App傪撉傔偽傛偄丅
Landau (2007) 偱偼GPSNet v.2.5偱嵦梡偝傟偨FAMCAR偺寁嶼岠棪壔偵偮偄偰弎傋偰偄傞丅偙偺榑暥偵傛傞偲丄FAMCAR偺Geometry
Filter偼婎弨嬊悢偑懡偔側傞偲寁嶼検偑媫寖偵憹戝偡傞偨傔慜斉偺GPSNet偱摨帪張棟壜擻側婎弨嬊悢偼嵟戝50嬊偵惂尷偝傟偰偄偨丅廬偭偰50嬊傛傝戝偒側婎弨嬊栐偱偼僒僽僱僢僩儚乕僋偵暘妱偟偰張棟偡傞昁梫偑偁偭偨丅偙偺栤戣偵懳墳偟寁嶼検傪嶍尭偡傞偨傔GPSNet
v2.5偐傜"Federated Geometry Filter"偲偄偆庤朄偑庢傝擖傟傜傟偨丅偙偺庤朄偱偼扨堦偺Geometry
Filter偺戙傢傝偵丄扨堦偺Frame Filter偲嬊枅偺暋悢偺Geometry
Filter偵暘妱偟偰張棟偡傞丅Frame Filter偱偼婎弨嬊栐偺僒僽僙僢僩傪巊偭偰塹惎婳摴岆嵎僷儔儊乕僞
(彂偄偰偄側偄偑懡暘帪寁傕) 傪悇掕偟偦偺寢壥傪嬊枅偺Geometry
Filter偵揔梡偡傞丅偙偺庤朄偵傛傝丄100嬊1擔暘偺婎弨嬊僨乕僞張棟帪娫偑3581暘偐傜57暘偵抁弅偝傟丄棙梡幰應埵惛搙傗弶婜壔帪娫偼傎偲傫偲楎壔偟側偄丄偲偟偰偄傞丅Landau
(2007) 屻敿偱偼僱僢僩儚乕僋曗惓偺昳幙忣曬傪應埵偵棙梡偡傞偙偲偵傛傝應埵惈擻傪夵慞偡傞庤朄偵偮偄偰弎傋偰偄傞丅
塹惎婳摴丒帪寁偼慡婎弨嬊傪巊傢側偔偰傕悇掕忦審偼埆偔側傜側偄偼偢側偺偱寁嶼検嶍尭偲偟偰偼懨摉側庤朄偩傠偆丅偙偺榑暥傪撉傓尷傝丄婛偵GPSNet
v.2.5偱偼300嬊偺婎弨嬊僨乕僞偺堦妵張棟傕壜擻側偺偐傕偟傟側偄丅
.....................................................................................................................................
| Home | by T.Takasu |
{kind=link}
{kind=link}