|
日記・備考録 |
2005 | 2006 | 2007 | 2008 | 2009 | 2010/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2011 |
| March | April 2010 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 |
May | Home |
...................................................................................................................................
NovAtel Service Bulletin, OEMV GLONASS Tracking Error
GLONASSのAlmanac変更に伴うF/W動作異常が原因だったみたい。
F/W 3.701にupしようとしたんだけど以前のauth codeではinvalid auth codeと出て正常動作しない。最後にF/W
upgradeしてからもう1年以上経ってるので、もしかするとサポート契約してないとダメ? これ完全なF/Wバグなので無償でF/W更新が当然だと思うけど。
補足: 間違えてOEM Versionをインストールしてしまったようで、Update Versionを入れなおしでOK (12:17追記)。
-------------------
ION GNSS 2010, September 21-24, 2010, Portland, Oregon
ION GNSS 2010のプログラム決定。まだ通知は来ていないがとりあえずAlternatesで拾われた様なので今年は行くことになりそう。
...................................................................................................................................
2台のNovAtel OEMV-3G受信機が停止。原因不明だが2台同時に故障するとも考えにくいのでどうもF/Wの問題っぽい。問い合わせメモ。
> 本日、NovAtel OEMV-3Gが2台とも正常にGPS/GLONASSを
> 受信できない事象が発生し、16:20現在復帰していません。
>
> (1) 電源OFF/ON→復帰せず
> (2) ターミナル経由でresetコマンド実行→復帰せず
> (3) freset command→復帰せず
> (4) freset standard→一時的に復帰するが数分で停止
>
> 停止時コンソールには
> <Error : SCAF_Assert, allprnlist.cpp 117>
> というエラーメッセージが出ています。
>
> アンテナが問題ないことは他の受信機で確認。2台の受信機が
> 同じ症状であることから、H/Wの問題ではなくF/Wの問題の
> 可能性が高いと思います。log versionで出力したF/Wバージ
> ョンは以下の通りです。
> ...
...................................................................................................................................
時間の関係でRTKLIB v.2.3.1を飛ばして、次期版はv.2.4.0とすることにしました。v.2.4.0では後処理/リアルタイムPPP機能を含めた大幅な機能拡張が入ります。なんとか5月中旬にリリースしたいのだけど。
-------------------
F.Remi, [IGS-Mail-6136]: Availability of "repro1" products, April 26, 2010
IGSの再解析がやっと終わったようでREPRO1プロダクトが公開されている (1994/1/2〜2007/12/29)。GTのダウンローダ定義形式。
cddis='ftp://cddis.gsfc.nasa.gov'; % CDDIS
2,'IGS EPH REPRO1(CDDIS)', [cddis,'/gps/products/repro1/%W/ig1%W%D.sp3.Z']
2,'IGS CLK REPRO1(CDDIS)', [cddis,'/gps/products/repro1/%W/ig1%W%D.clk.Z']
2,'IGS CLS REPRO1(CDDIS)', [cddis,'/gps/products/repro1/%W/ig1%W%D.cls.Z']
2,'IGS ERP REPRO1(CDDIS)', [cddis,'/gps/products/repro1/%W/ig1%W7.erp.Z']
2,'IGS SUM REPRO1(CDDIS)', [cddis,'/gps/products/repro1/%W/ig1%W7.sum.Z']
2,'IGS POS REPRO1(CDDIS)', [cddis,'/gps/products/repro1/%W/ig1%yP%W.snx.Z']
なおGT0.6.4にはキーワード%Wの展開にバグがあるので、GPS週999以前のREPRO1データをダウンロードし解析に使うためには以下のプログラム修正が必要です。
gt_0.6.4/private/gfilepath.m L71: '%03d' → '%04d'
またGT0.6.4ではig1...のファイル名はサポートされませんので、解析に使うためにはig1...→igs...等のリネームも必要です。
...................................................................................................................................
Amazonで注文してた本が3冊ほど届いた。
T.Herring (ed.), Geodesy: Treatise on Geophysics, Elsevier, 2009
D.D.McCarthy et al., Time from Earth Rotation to Atomic Physics, Wiley-vch, 2009
K.R.Britting, Inertial Navigation Systems Analysis, Artech House, 2010
最後の本はArtech HouseのGNSS Technology and Applicationsシリーズの一冊だが、1971年に出た古い本の復刻版らしい。しかし慣性航法システムって40年以上前からあるのね。ってかアポロ計画は1960年代なのだから当たり前か。
...................................................................................................................................
RNX2RTKPに、Linux版Intel MKL (非商用利用フリー) をリンクしたので手順メモ。
(1) ダウンロード: http://software.intel.com/en-us/articles/non-commercial-software-development/
(2) Email登録するとシリアル番号が送られてくる。
(3) 適当なところに展開してインストールスクリプト実行
$ tar xvfz l_mkl_p_10.2.5.035.tar.gz
$ cd l_mkl_p_10.2.5.035
$ ./install.sh
(4) メニューに回答して適当にインストール。ここではインストール先を/opt/intelとする。
(5) インストール途中でシリアル番号を入れてwebでアクチベーションが必要。
(6) rnx2rtkpのgcc/makefileを以下のように修正してmake。
MKLDIR=/opt/intel
CFLAGS= -Wall -O3 -ansi -pedantic -I$(SRC) -DMKL -DTRACE -DENAGLO -I$(MKLDIR)/include
LDLIBS= -L$(MKLDIR)/lib/32 -lm -lmkl_core -lmkl_intel -lmkl_gnu_thread
-liomp5 -lpthread
(7) 実行環境のLD_LIBRARY_PATH設定
export LD_LIBRARY_PATH=/opt/intel/lib/32:$LD_LIBRARY_PATH
30s間隔7日分の後処理長基線解析の実行時間。
real 0m56.496s
user 0m51.667s
sys 0m3.540s
real 2m26.780s
user 2m15.700s
sys 0m8.773s
上がMKLを使ったもの、下がUbuntu標準BLAS/LAPACKを使ったもの。環境は i7 930 2.8GHz + Windows 7 64
bit +VMware WS 6.5.2 + Ubuntu 9.04 + gcc 4.3.3。ただ、WMwareではマルチコアを使いきれない様でCPU負荷は25%位までしか上がらない。(MKL
9.1をリンクしたwindows上のRTKPOST_MKLでは実行時間約45sで、100%までCPU負荷が上がる)。
電離層や対流圏の推定をしているので、MKLを使っても1エポック3msもかかっている。ちょっとこれは遅い。もうすこしなんとか高速化したいのだけど。
補足: VMwareの仮想マシン設定-プロセッサ数を設定するとマルチコアを使ってくれるよう。プロセッサ数=2個に設定し、環境OMP_NUM_THREADS=4にして実行した結果。userの結果が変だがCPU負荷は50%まで上がる。なおVMware WS 6.5.2で設定できるプロセッサ数は2個まで。VMwareをバージョンアップしてICCを導入してみようか。(18:03追記)
real 0m46.526s
user 1m9.248s
sys 0m10.865s
補足: icc 11.1とVMware 6.5.4を入れてみたけどプロセッサ数も2までで実行速度もほとんど変わらない。なお、GLONASSがいらない場合はコンパイルオプション-DENAGLOを付けないと少し速くなります (35sくらい)。一応高速化のため、使ってない状態変数は更新をスキップする様にしてるのだけど、行列サイズが大きくなってコピー等のオーバヘッドがかかっているものと思われ。結局上の例でも分かるようにCPU時間のほとんどが行列演算なので頑張ればもう少し最適化できると思うのだけど。(4/28追記)
...................................................................................................................................
C++ Bulder 2010でRTKLIBのAPをビルドするとエラーになると聞いたので、30日評価版を入れて確認。
> 'wchar_t *'型は'const char *'型に変換できない。
> パラメータ ... は const char *型として定義されているので wchar_t *は渡せない
> 'const char *'型は'char *'型に変換できない
というエラーが多量に出る。調べてみるとC++ Builder 2009から、標準の文字列型がAnsiStringからUnicodeStringに変更になっている様。従って文字列を入出力するライブラリはだいたいダメ。基本的に文字列は英語しか使ってないのであんまりunicode化する必要ないのだが、ファイルのパス名等にはワイド文字が入っている可能性があるので、真面目に直す必要がある。下位互換性もとる必要があるし、これどうしようかなあ。
補足: とりあえずエラーとなっているのはstr.c_str()でかつstrがUnicodeStringであるところなので、AnsiString(str).c_str()とUnicodeStringをAnsiStringに変換してあげれば良い様。でもまだ、"°"の文字が文字化けするのが治らない。(15:25追記)
-------------------
高須, 精説GPS第2版セミナー: 第8章 信号と線形システム, 測位航法学会, 2010 (PDF: 477KB)
高須, 精説GPS第2版セミナー: 第9章 GPS信号, 測位航法学会, 2010 (PDF: 1101KB)
私の分の測位航法学会セミナー資料をup。ぜひ、テキストもご購入下さい。
...................................................................................................................................
測位航法学会から帰還。思ったより参加者も多かったし第1回としては上手く行った大会だったのではと思う。スタッフの方々、ご苦労様でした。
なお、今回セミナーテキストとして使われた P.Misra and P.Enge, 測位航法学会訳,「精説GPS 改訂第2版」についてはこちらで購入できるようになる予定です。ご購入希望の方はもう少しお待ちください。GPS/GNSS、特に受信機についての和書の本格的な教科書というのはほとんど他にないので、¥6,300
(税込)で全526頁はお買い得ではないかと思います。
...................................................................................................................................
萌えるGPS研究所
また検索してたらこんなの見つけてしまった。仕事をせねば。
...................................................................................................................................
NovAtel, RT-2 L1TE NovAtel's Single Frequency RTK Solution, 2009
NovAtelの1周波RTK解RT-2 L1TE (多分「RT-2ライト」と読ませる) のRTK性能評価結果。GLONASS+SBAS観測値を追加することによりCompetitor
A (多分GPS L1のみ) に比較し初期化時間や信頼性を大幅に改善できるとしている。OEMStarにも今後RT-2 L1TEオプションを追加してくるのではないかと思う。更新費用が安ければF/W更新して評価してみるかもしれない。
ところでCompetitor Aってどこだろう。やはりHemisphereだろうか。
...................................................................................................................................
Twitter, みちびき (準天頂衛星) さんからの、短くてタイムリーなメッセージを受信しましょう!
検索してたらこんなの見つけてしまった。
-------------------
SpaceFlightNow, Indian rocket tumbles back to Earth during test launch, April 15, 2010
インドの通信衛星GSAT-4が、第3段ロケットの不調で打ち上げ失敗。ロケットと衛星はインド洋に沈んだ。GSAT-4には試験通信衛星用ペイロード以外にインド版SBAS
GAGAN用のトランスポンダが積まれていたので、GAGANの運用開始も当分先送りになるだろう。
なにか、MTSAT-1 (H-II 8号機) の打ち上げ失敗を思い出すが、あれはもう11年前のことなんだなあ。ちょっと8月に予定されているQZSS-1の打ち上
げ (H-IIA 18号機) が心配ではある。(H-IIAは既に16回連続打ち上げ成功しているので失敗確率は低いと思うが)
補足: H-IIA 6号機は打ち上げ失敗 (SRB-Aの分離不良で爆破) しているので、今のところ15/16の成功、が正解 (23:10追記)
この記事によると1年以内にもう一機衛星を打ち上げるとのこと。さすがに予備衛星も用意しているということなのだと思う。(4/20追記)
...................................................................................................................................
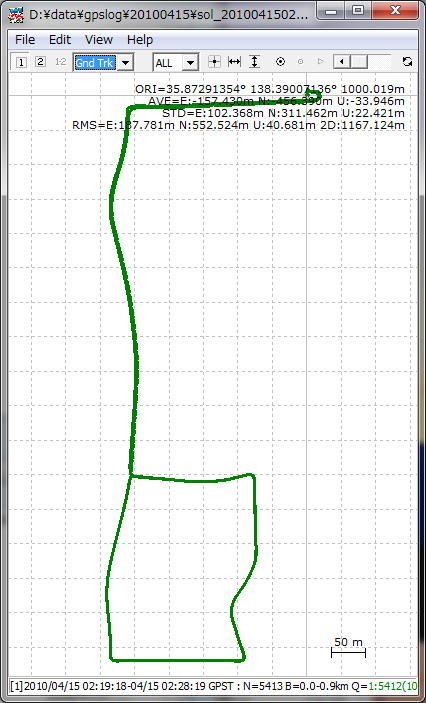
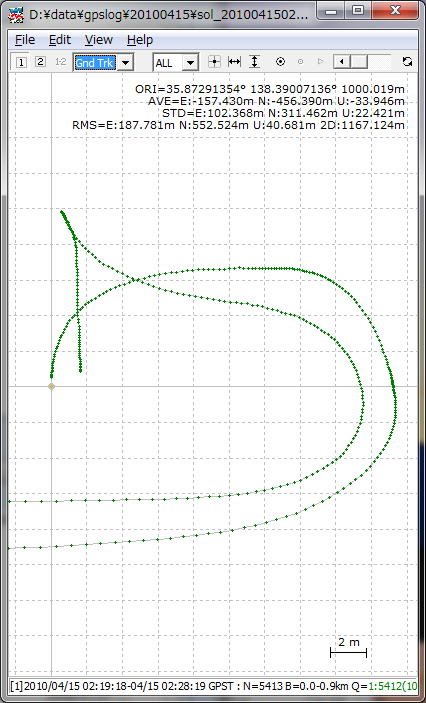
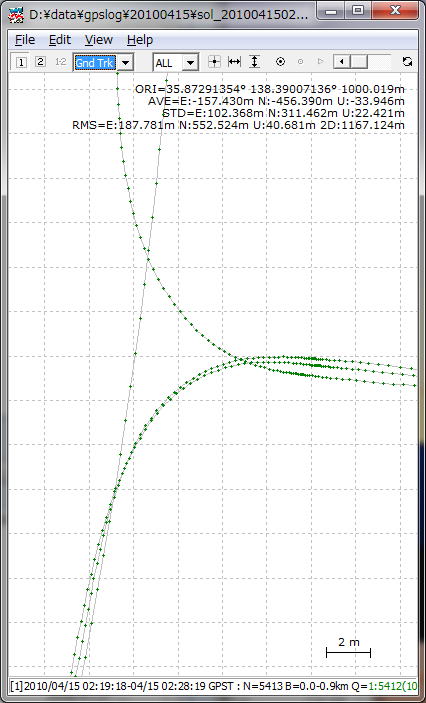
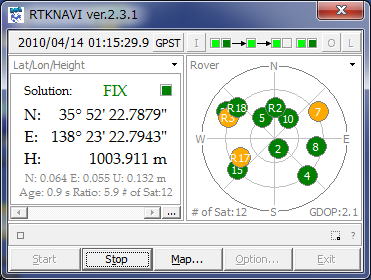
OEMStarで移動体RTKを試してみた。上空視界の良いいつものテストコース。基準局はOEMV 1HzでEmobileでサーバに繋いでいる。GPS+GLONASS
1周波 10Hzで可視衛星数は12-13機。ARはFix and HoldなのでFIX率100%。ちょっと条件が良すぎたかもしれない。
補足: 動作確認できたのでRTKLIBのサポート受信機にOEMStarを追加 (参照)。(16:35)
RTK計算はRTKNAVI v.2.3.1の開発版であるが、v.2.3.0でもほとんどそのまま動くはず。(4/20追記)
-------------------
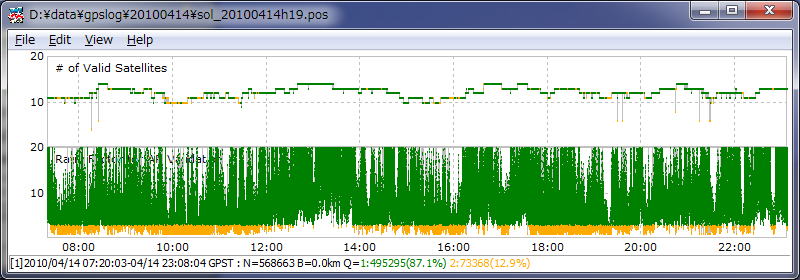
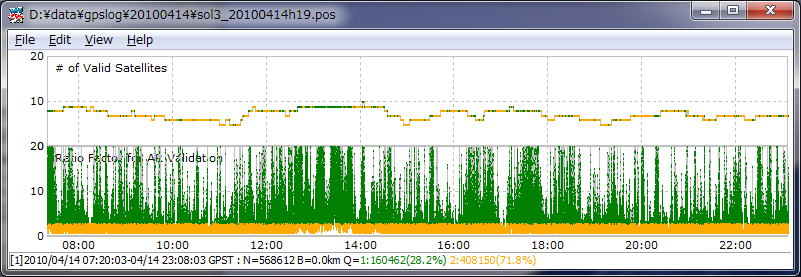
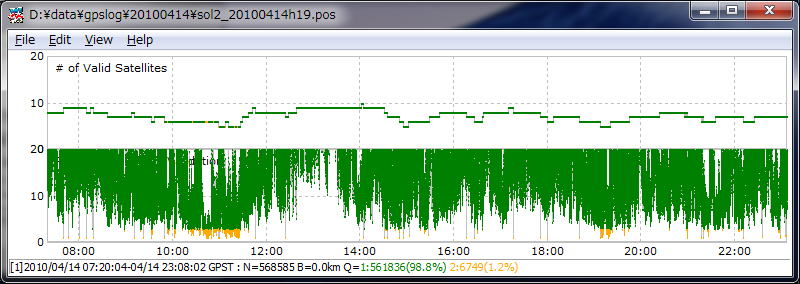
OEMStarのRTK-GPS/GLONASS性能。10Hz 15.5H程の衛星数、Ratio factorの推移。上からOEMStar-OEMV
GPS+GLONASS 1周波, OEMV-OEMV GPS 1周波、OEMV-OEMV GPS 2周波。仰角マスク15度でOEMStarのCH割り当てはGPS
8CH+GLONASS 6CH。1m基線のInstantaneous (瞬時) AR解である。さすがにGPS 2周波解は瞬時FIX率が98%を超えている。OEMStarによるGPS+GLONASS
1周波解も瞬時FIX率で87%を超えているので、アプリケーションを選べば概ね移動体でも使えるのではないか。スタティック測位用なら性能は十分だと思う。昨日、14CHで十分でない、と書いてしまったが15度以上の仰角に限定すればGPS+GLONASSで現在最大でも15衛星しか見えないので、14CHでほぼフル構成の衛星を利用できる。8月にGLONASS-Mが3機上がると現在9や10衛星しか見えていない時間帯の性能が改善されるはずなので、値段や機能を考えるとOEMStarはかなりお買い得な受信機だと思う。
なお、研究用ということで少しディスカウントしてもらっているので、細かい価格は書かないが、OEMStar+10Hz+GLONASS版2式でGPS-702-GG
1式より少し安い位のお値段である。
補足: OEMStar-OEMV間のGLONASSコード観測値のinter-channelバイアスは本当はちゃんと校正した方が良いのだが、とりあえずCode/Carrier-Phase
Error Ratioを100→300に変更してコードのウェイトを下げて対応している。多分OEMStar-OEMStar基線ではこの問題は出現しないと思われるので、OEMStar-OEMStar基線では上よりもう少し性能が上がるはずである。(8:52追記)
以上の評価で分かるようにRTK性能に対する可視衛星数の寄与は大きい。ということで将来的にはGPS+Galileo 1周波受信機によるRTKは有力であろう。ただGalileoの衛星数が現在のGLONASS並みになるのはまだ5年はかかりそうなので、現時点でOEMStarの価格性能比は高い。(9:00追記)
...................................................................................................................................
NovAtel OEMStarのF/W更新用コードを送ってもらって更新完了。以下はローバ: OEMStar、基準局: OEMVの1周波RTK-GPS/GLONASS解。なおOEMStar - OEMV基線ではGLONASS受信機inter-channelバイアスの問題は出ていない。OEMStarの問題は14CHしかないところでCHのアサインがどうされるのかちょっと確認してみたい。可視衛星の数が増えるので、1周波で2周波RTK-GPSに近い性能が得られれば、OEMStarの値段は十分安いと言えると思う。
補足: OEMStar-OEMV基線でGLONASS受信機inter channelバイアスの問題が出ていない、と書いてしまったがよーく調べてみると搬送波位相ではなく、GLONASSコード観測値にのみこのバイアスの影響が現われてRTK性能を落としていることが分かった。RTKLIB
2.3.0に組み込んだバイアスの自動校正機能は搬送波位相とコードに同じ大きさのバイアスが含まれることを前提としているのでこの機能も正常動作しない。やはり異機種間基線RTK-GPS/GLONASSは受信機に依存した取り扱いのやっかいな問題を含んでいる。これはやはり個々の受信機ペアで校正して校正テーブルを作ってそれを使うしかないのかも。(16:13追記)
-------------------
European Union, European GNSS (Galileo) Open Service Signal In Space Interface Control
Document, Issue 1, February 2010
GalileoのOS SIS ICDの正式版が発行された。ICDに書かれているIPR (Intellectual property rights)
を使うにはLicense FeeはいらないけどLicense Agreementを結ぶ必要があるとのことのようだ。ライセンス関連の部分だけ抜き出すと、
> Open access to Galileo signal to inspire new navigation services
>
> The European Commission is granting free access to the technical information
on the future Galileo open service
> signal, i.e. the specifications manufacturers and developers need
to process data received from satellites. The
> updated "Galileo Open Service Signal-In-Space Interface Control
Document” (OS SIS ICD) informs receiver
> manufacturers, application developers and service providers on how
to use the future Galileo system and what
> they can expect in terms of performance. This information is free-of-charge.
>
> Anyone who wishes to use the intellectual property rights contained
in the document simply needs to send
> an e-mail to oss-icd@ec.europa.eu mentioning their request for a license
agreement, which is without any
> exclusivity or geographical limitation. Independent studies indicate
that Galileo is expected to deliver
> downstream market revenues of ?14 billion between 2014 and 2027, primarily
in the market of receivers
> and applications.
> ...
>
> IPR licence for commercial use
>
> The use of the information contained in the OS SIS ICD, including
the spreading codes which are subject to
> IPR, is hereby allowed for manufacturing, distribution, commercialisation,
sale of electronic devices (e.g.
> chipsets and receivers) and supply of Value Added Services according
to the terms and conditions of the
> license agreement attached hereto as Annex E.
> ...
ということで、License Agreementを結ぶにはE-mail送るだけでいいみたい。
...................................................................................................................................
測位航法学会, セミナーのご案内, 2010年4月22, 23日
測位航法学会全国大会期間中に精説GPS第2版をテキストとして使ったセミナーが開催されます。皆様奮ってご参加ください。
ということでセミナー資料作らにゃいかん。
-------------------
NovAtel OEMStar購入。左がOEMStar, 右はSuperStarII。基板サイズや穴位置、コネクタはSuperStarIIと互換性がある。コマンドやログはOEMV-1/1Gとほぼ同じ。従ってRTKNAVIでもOEM4/Vの設定でそのまま動いた。当然GLONASS対応と思っていたのだが、実はGLONASSに対応していないF/Wだったことが分かりF/W更新依頼中。10Hz-GLONASS版は「低価格」とは言いにくい値段なので非常に多機能ではあるが、普通に使うにはHemisphereのCrescentボードの方が良いのではないかと思う。GLONASS対応にF/W更新して、少し1周波RTK-GPS/GLONASSの評価をしてみるつもり。なおマニュアルを読むと、OEMStarはRTKに対応しているようだがまだRTK対応F/Wはリリースされていないとのこと。多分将来的にはF/W更新で対応するのではないかと思う。

しかし際限なく受信機買っている気がする。一体受信機何台転がっているのだろう。でももうすぐ (5/20 or 21) Block IIFの初号機が上がるのでOEMV-3のL5対応F/W更新もしたいし、L5受けるためにアンテナも新しくしたいなあ。
...................................................................................................................................
J.Kouba, IGS Observations during the February 27, 2010 M 8.8 Chilean Earthquake, March 8, 2010
NRCanのJ.KoubaがキネマティックPPPで2月のチリ地震を解析した結果を出しているのを教えてもらった。この結果を見てもCONZのデータギャップ間に上下に大きな飛びが出てしまっている。これも多分4/1に書いたGT-PPPの結果と同じような解析の問題に起因する可能性が高い。
-------------------
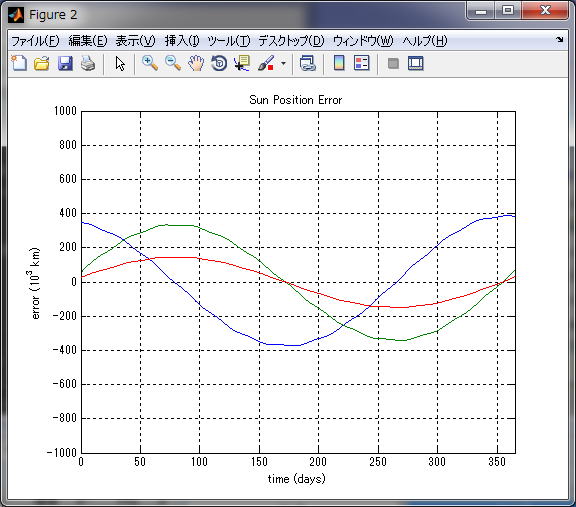
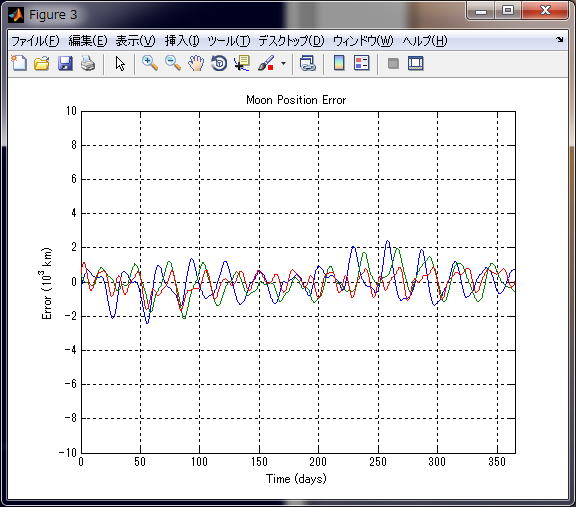
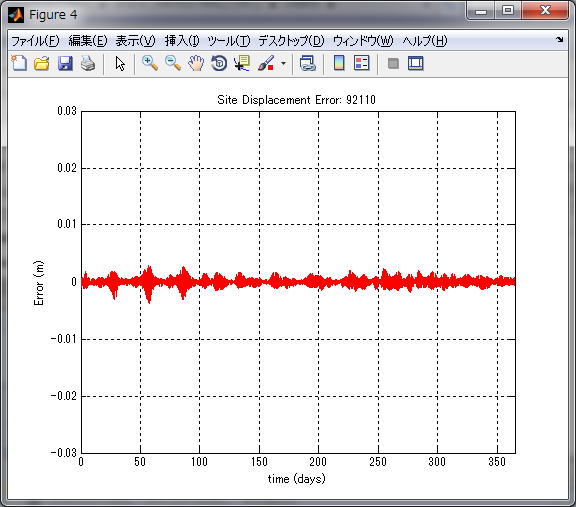
RTKILIB 2.3.1に組み込んだ太陽・月位置計算ルーチン。結局Vallado 2nd 5.1.1, 5.2.1の略算式を使った。ただ座標系はJ2000平均赤道なのでECEFにするために別にIAU1976/1980歳差・章動ルーチンを実装している。時刻系はUT1だけどUTCを入力してもこの精度では変わらない。DE405と比較した誤差 (太陽位置、月位置、潮汐)。潮汐モデルには十分そう。RTKLIB 2.4.0で追加するPPP用にどうしても必要になるので今回入れた。なお海洋荷重は結構効く(固体地球潮汐の数割位)のだけど、BLQパラメータの読み込みがちょっと面倒なので、計算自身は実装したけどRTK用には使っていない。PPP用にはどうしようかなあ (主目的がリアルタイム-キネマティックなので無くてもよいかなあ) と思っている。
/* sun and moon position -------------------------------------------------------
* get sun and moon position in eci by low-precision ephemeris
* args : gtime_t tut I time in ut1
* double *rsun O sun position in eci (m)
* double *rmoon O moon position in eci (m)
* return : none
* notes : see reference [3] 5.1.1, 5.2.1
*-----------------------------------------------------------------------------*/
extern void sunmoonpos(gtime_t tut, double *rsun, double *rmoon)
{
const double ep2000[]={2000,1,1,12,0,0};
double t,f[5],eps,Ms,ls,rs,lm,pm,rm,sine,cose,sinp,cosp,sinl,cosl;
trace(3,"sunmoonpos:¥n");
t=timediff(tut,epoch2time(ep2000))/86400.0/36525.0;
/* astronomical arguments */
ast_args(t,f);
/* obliquity of the ecliptic */
eps=23.439291-0.0130042*t;
sine=sin(eps*D2R); cose=cos(eps*D2R);
/* sun position */
Ms=357.5277233+35999.05034*t;
ls=280.460+36000.770*t+1.914666471*sin(Ms*D2R)+0.019994643*sin(2.0*Ms*D2R);
rs=AU*(1.000140612-0.016708617*cos(Ms*D2R)-0.000139589*cos(2.0*Ms*D2R));
sinl=sin(ls*D2R); cosl=cos(ls*D2R);
rsun[0]=rs*cosl;
rsun[1]=rs*cose*sinl;
rsun[2]=rs*sine*sinl;
/* moon position */
lm=218.32+481267.883*t+6.29*sin(f[0])-1.27*sin(f[0]-2.0*f[3])+
0.66*sin(2.0*f[3])+0.21*sin(2.0*f[0])-0.19*sin(f[1])-0.11*sin(2.0*f[2]);
pm=5.13*sin(f[2])+0.28*sin(f[0]+f[2])-0.28*sin(f[2]-f[0])-
0.17*sin(f[2]-2.0*f[3]);
rm=RE/sin((0.9508+0.0518*cos(f[0])+0.0095*cos(f[0]-2.0*f[3])+
0.0078*cos(2.0*f[3])+0.0028*cos(2.0*f[0]))*D2R);
sinl=sin(lm*D2R); cosl=cos(lm*D2R);
sinp=sin(pm*D2R); cosp=cos(pm*D2R);
rmoon[0]=rm*cosp*cosl;
rmoon[1]=rm*(cose*cosp*sinl-sine*sinp);
rmoon[2]=rm*(sine*cosp*sinl+cose*sinp);
}
...................................................................................................................................
4月になったので久しぶりに新しいPCを組んだ。調べてみると2年半ぶり。i7 930 (2.8GHz)、RAM 6GB、SSD 160GB+HD 2TB (RAID1)+HD 2TB (backup)。Windows 7 64bit。Matlabを入れて恒例のベンチ。
>> bench,a=rand(2000);b=rand(2000);tic,c=a*b;toc,tic;c=inv(a);toc
| LU | FFT | ODE | Sparse | 2-D | 3-D | a*b | inv(a) | PC | Matlab version | OS |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.04 | 0.07 | 0.16 | 0.20 | 0.32 | 0.20 | 0.48 | 0.73 | *1 | 7.9 (R2009b) 64bit | Windows 7 64bit |
| 0.06 | 0.13 | 0.21 | 0.28 | 0.54 | 0.76 | 0.50 | 1.17 | *2 | 7.9 (R2009b) 64bit | Windows Vista 64bit |
VGAがRadeon HD5750なので3-Dは速いがそれ以外はイマイチ。Q6600の倍くらい速くなってくれることを期待してたのだけど、クロック差位しか速くならない様。MatlabはR2009bだからi7に最適化したMKLが入っているはずだけど結局8スレッドは使いきれない様。これくらいならSSDとHDの更新だけでもよかったかも。
...................................................................................................................................
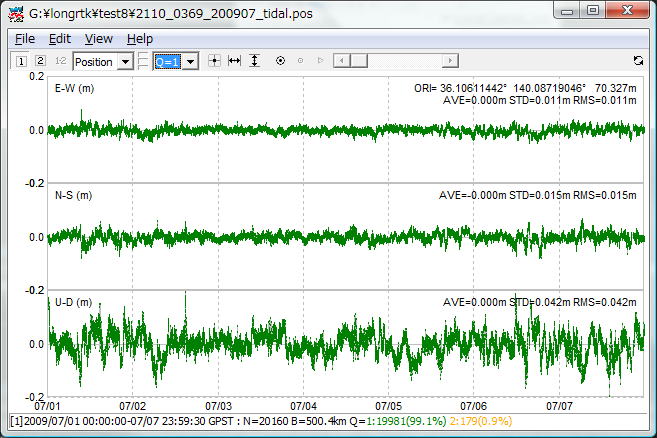
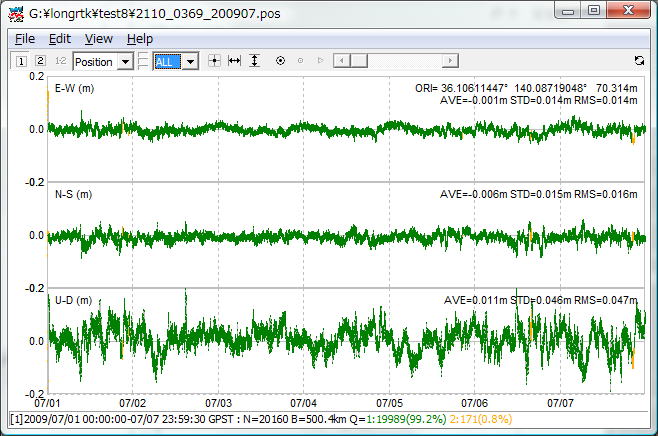
やっと潮汐モデルのRTKLIBへの実装完。固体地球潮汐だけ補正した500km基線 RTK解。思ったより良くならないが昨日の結果と比較すると東西、上下が改善されていることが分かる。
-------------------
GPS/GNSSの基礎・原理・応用
昨年夏に東北大で非常勤講師をやった時の資料を置いた。なんかよく参照したくなるので。今回はTAIとGPST間のオフセットを確認したかった。でもこの資料、自分で書くのもなんだが2日程度のチュートリアル用にはとてもよくまとまっていると思うのだけど。
...................................................................................................................................
docomo, 新たな衛星電話サービス「ワイドスターII」の提供及び「衛星可搬端末01」の販売を開始, 2010年4月5日
沿岸約200海里ということは沖合約370kmまでOK。¥0.105/パケット。RTK用に連続的に3
Kbpsの基準局データを送るとすると3000 (bits)
/0.8 (オーバヘッド) /8/128(B/パケット) ×86400
(s) ×30 (日) × ¥0.105 = ¥996,680/月。やはりパケットでも定額でないと使い物にならない。イリジウムやインマルサットは通話料もっと高いし、海上RTKはやはり通信回線コストが最大の課題。その点、QZSS
LEXで広域カバーできれば確かにメリット大きい。陸上は要らないので海上専用の補正データを配信したらどうだろう。
-------------------
RTKLIB 2.3.1作業中。
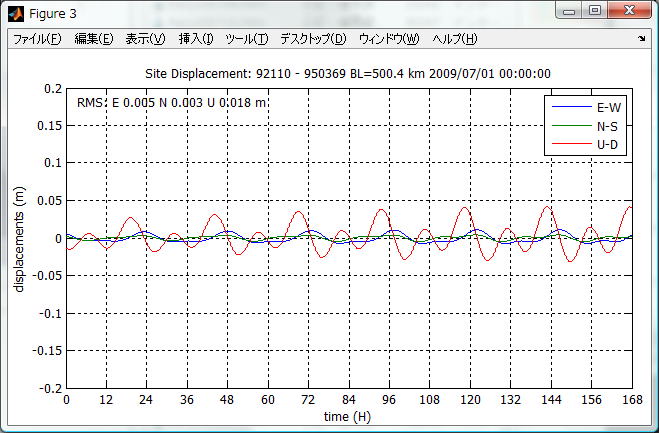
500km基線の長基線RTK解とモデル計算した潮汐による位置変動 (の差分)。300km基線位から潮汐による上下変動は無視できない様。ということで固体地球潮汐モデルを入れたいのだけど太陽と月の位置を求める略算式で良いのないだろうか。
補足: 天体位置表。海上保安庁の発行している天体位置表や暦についての情報を頂きました。情報感謝です。解説や計算式も公開されています。天体位置表ってずいぶん昔に誰かに借りたまま、返し忘れている気がするんですが、まだ発行されているんですね。(20:45追記)
...................................................................................................................................
C.Goldstein, Request for Feedback on GPS IIR-20 (SVN-49)
Mitigation Options, March 5, 2010
SVN49の信号問題に対し、衛星をhealthyにしたいんだけどどうしらたいいか教えてと、GPS
Wingが民生ユーザコミニティに呼びかけたらしい。オプションは以下の9つ。
(1) アンテナオフセットを152mに維持したままhealthyにする。
(2) アンテナオフセットは工場計測値にしてhealthyにする。
(3) 受信機をマルチパス対応受信機に置き換える。
(4) 受信機ソフトにルックアップテーブル補正を入れる。
(5) URAを3以上に上げる。
(6) L2 P(Y)コードのデータ変調をやめる。
(7) L2CのPRNコードをユニークなものに変える。
(8) PRN番号をPRN1からPRN32に変える。
(9) スペアヘルスコードを使ってunhealthyだけど利用できることを表す。
今後の計画として来年1月にはhealthyにする決定をしたいとのこと。でもまともな解決策は (9) くらいで後は話にならないオプション。こんなオプションしか思いつかないところを見ても、もうどうしようもないと皆諦めていることが分かる。
-------------------
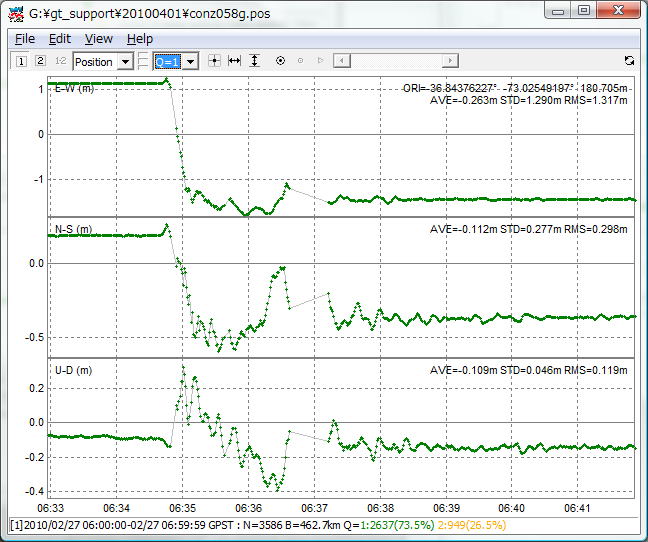
2月のチリ地震 (Mw8.8) 震源近くのIGS点CONZ (距離約100km) の1Hzデータが公開された (参照) のでGT0.6.4のキネマティックPPPで解析してみた。暦/時計はIGS/IGS+CODE5s。6:34:50-54, 6:35:39-42にほぼ全衛星にデータ飛びとスリップが発生しているのであまりきれいに解析できていない。東西約3m、南北約80cmの変位はほぼ間違いないと思うが、データ飛び間の大きな上下変位は解析の問題の可能性が高い。受信機はLeica GRX1200GGPROだが、データ飛びは地震による加速度が大きすぎて搬送波を追尾できていないのが原因ではないかと思う。これくらいの加速度でロックがはずれないでほしいのだが 。(これを見ると地震による最大加速度が0.4 g、最大速度が40 cm/sくらい。これくらいでロックがはずれるものだろうか?)
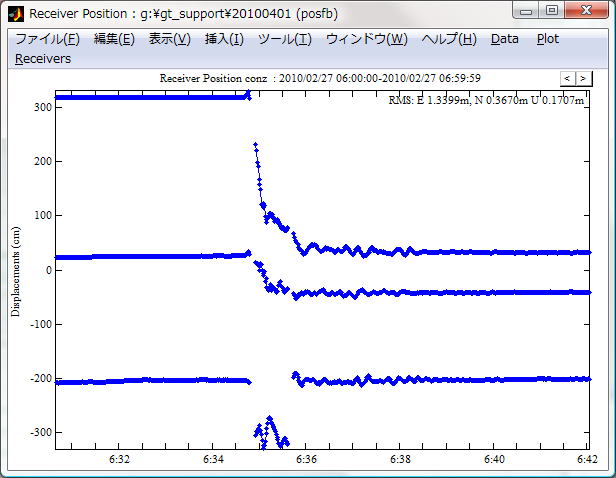
震源から300km位のIGS点SANTでも1Hzデータを取っていたので、せっかくなのでRTKPOST v.2.3.0による後処理基線解析 結果 (基線長463km)。暦はIGS Final。これはSANT点の変位も拾ってしまっている様。
-------------------
ちょっと原因が良く分からないのだが3月にRTKLIB
2.3.0のダウンロード数が急に増えて、累積26,000件を超えた。有難いことである。
Webalizerが出力する「Hit数」をダウンロード数として数えていたのだが、数値がおかしいのでログファイルを直接確認したら、どうもWebalizerはブラウザが分割ダウンロードした場合、その分割毎に1Hitにカウントしてしまう様。ということで再度スクリプトを書いて統計を取りなおした結果。約3,700件でした。
...................................................................................................................................
| Home | by T.Takasu |
{kind=link}
{kind=link}
{kind=link}
{kind=link}