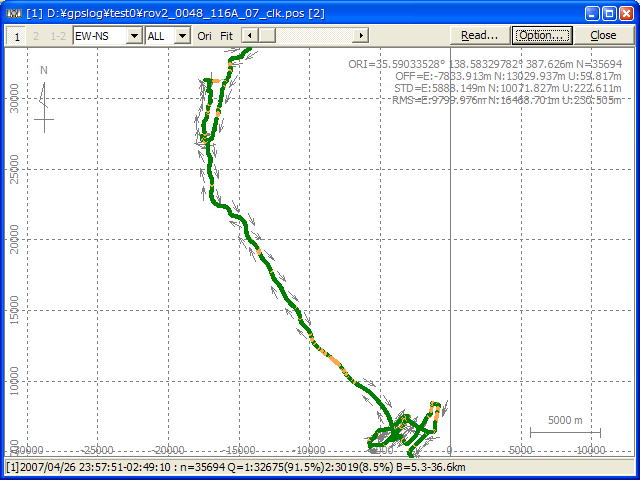
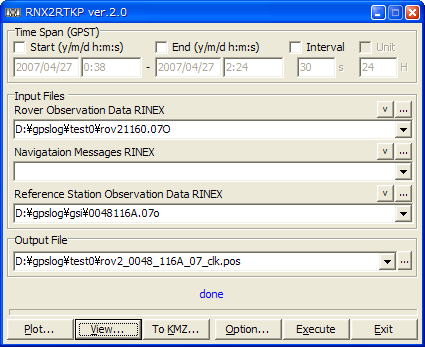
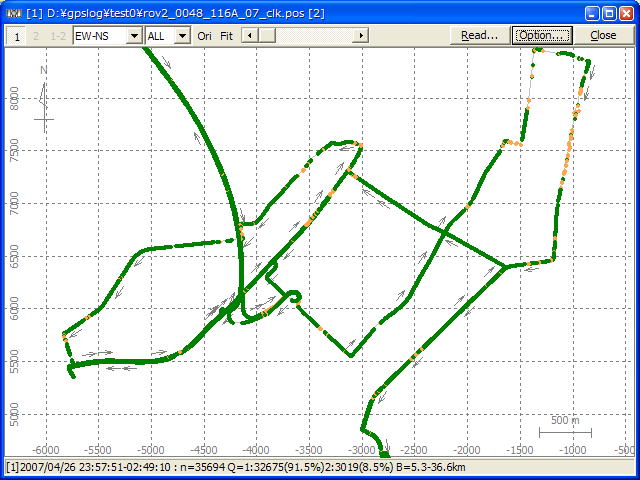
●: Fix解、●: Float解、拡大1、拡大2、拡大3
| キネマティックGPSによる移動体高精度測位 Precise Positioning of Mobile Receiver with kinematic-GPS |
2007/05/24 | Home |
|
時間・空間補間した基準局網観測値によるキネマティックGPS性能の評価 |
高須, 時間・空間補間した基準局網観測値によるキネマティックGPS性能の評価,
地球惑星科学連合大会2007 (発表資料ppt 4.2MB)
高須他, 低レート基準局観測データを使った移動体キネマティックGPS測位, 電子情報通信学会 宇宙・航行エレクトロニクス研究会 (SANE), 2007 (pdf 381KB) (公開終了)
移動体キネマティックGPS解析結果
・観測時間 : 2007/4/27 8:57-11:49JST, 4Hz
・移動体(ローバ) : 自動車, NovAtel OEMV-3(L1/L2)+GPS-702-GG
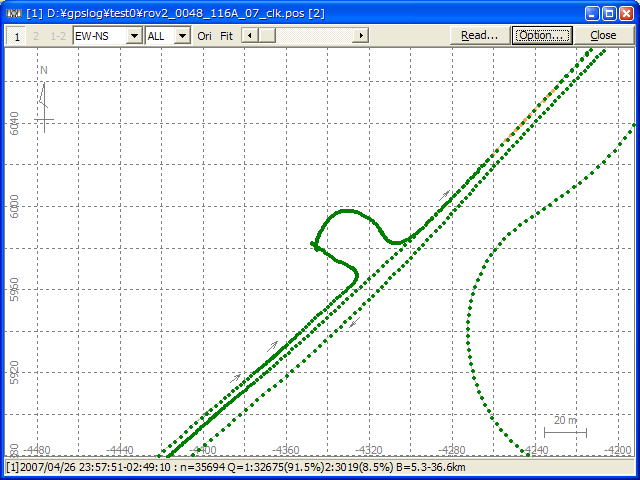
・観測データ : rov21160.zip (RINEX 10.7MB)、
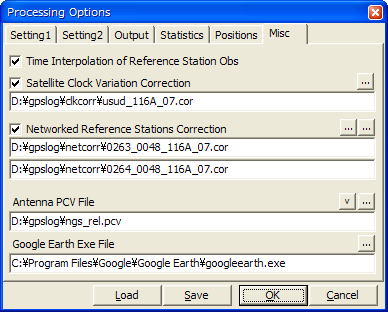
・基準局 : 電子基準点 0048(中道)+0263(小淵沢)+0264(牧丘) (30s時間補間+空間補間)+1Hz衛星時計変動補正(IGS
USUD)
・測位解 : rov2_0048_116A_07_clk.zip (559KB)、rov2_0048_116A_07_clk.kmz (Google Earth 720KB、高度データ無)
・基準局間補正量差推定値 : 0263_0048_116A_07.zip (6.8MB)、0264_0048_116A_07.zip (7.0MB) *1
・1Hz衛星時計変動推定値:usud_116A_07.zip (5.6MB) *2
・基線解析プログラム : RNX2RTKP ver.2.0
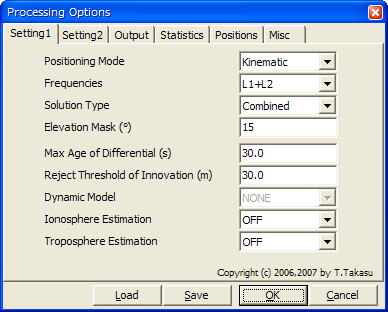
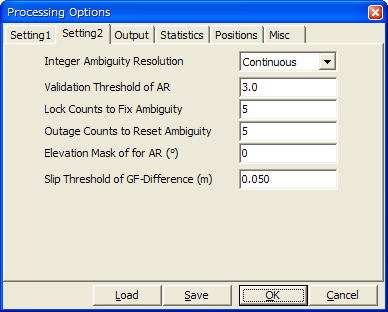
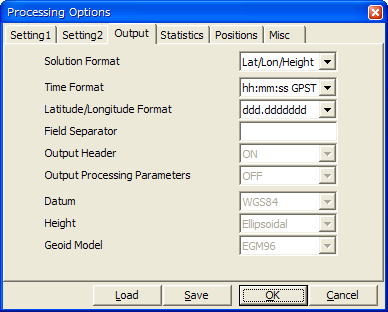
・解析パラメータ設定 :
・解析実行時間 : 1分5秒 (Intel C2D 2.4GHz, Windows XP pro) (補正量推定除く)
*1 : 形式 = 年月日 時刻(GPST) 衛星PRN L1補正量差(m)
L2補正量差(m) (slave RS - master RS)
*2 : 形式 = 年月日 時刻(GPST) 衛星PRN 時計変動補正量(m)
(30s間隔線形補間値基準)
| Home |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}