{kind=link}
|
擔婰丒旛峫榐 |
2004 | 2005/1 2 3 4 5 6 7 8 9 10 11 12 | 2006 |
| Octorber | November 2005 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 |
December | Home |
.....................................................................................................................................
堦擔奜弌丅怓乆側棟桼偐傜崱屻偺尋媶奐敪偺僥乕儅傪尒捈偡偙偲偵偟偨丅傑偢偼僒乕儀僀丄擭枛傑偱偵曽岦晅偗丅
.....................................................................................................................................
榑暥丄偦偺懠儕儞僋
徏塱懠, 擔杮廃曈偵偍偗傞GPS怣崋偺揹棧憌僔儞僠儗乕僔儑儞偺娤應偲夝愅, 揹巕峲朄尋媶強曬崘 No.111, 2004
K.M.Groves et al., A Comparison of GPS Performance in a Scintillation
Environment at Ascension Island, ION GSP 2000
揹棧憌僔儞僠儗乕僔儑儞偵娭偡傞尋媶丅僔儞僠儗乕僔儑儞偼揹棧憌偺揹巕枾搙晄婯懃峔憿偵傛傝怣崋嫮搙偲埵憡偺椉幰偵帪娫娫妘偺抁偄曄摦偑敪惗偡傞尰徾丅懢梲妶摦妶敪婜丄掅帴婥堒搙抧曽丄擔杤屻偵敪惗偡傞偙偲偑懡偄傜偟偄丅GPS應埵偵偍偄偰偼揹棧憌抶墑曄摦丄嶨壒儗儀儖偺憹戝傗僒僀僋儖僗儕僢僾憹壛偵傛傞應埵惛搙埆壔偺塭嬁傪梌偊傞丅幚嵺偺娤應僨乕僞傪尒傞偲崅堒搙娤應嬊偱偼掕忢揑偵揹棧憌抶墑曄摦偑戝偒偄嬊偑偁傝掅堒搙娤應嬊偱偼捠忢偼嵶偐偄曄摦偼彮側偄丅LG慄宍寢崌傗RINEX娤應僨乕僞偵娷傑傟傞怣崋嫮搙應掕抣傪巊偆偲僔儞僠儗乕僔儑儞敾掕偑弌棃傞偼偢偱偙傟傪巊偭偰悇掕忦審傪adaptive偵曄峏偡傞偲應埵惛搙岦忋偵寢傃晅偗傜傟傞偐傕偟傟側偄丅
.....................................................................................................................................
僔僐僔僐偲僐乕僨傿儞僌丅媣偟傇傝偵C偺僐乕僪傪0偐傜彂偄偨偺偱makefile偺彂偒曽傕朰傟偰偄傞丅
RINEX2.10偺巇條彂傪嵞搙撉傫偱偄偨傜埲壓偺條側婰弎傪敪尒丅(3. DEFINITION OF THE OBSERVABLES)
If the receiver or the converter software
adjusts the measurements using the real-time-derived
receiver clock offsets dT(r), the consistency
of the 3 quantities phase / pseudo-range
/ epoch must be maintained, i.e. the receiver
clock correction should be applied to all
3 observables:
Time(corr) = Time(r) - dT(r)
PR(corr) = PR(r) - dT(r)*c
phase(corr) = phase(r) - dT(r)*freq
埲忋傪撉傓尷傝Steered Clock庴怣婡偺帪寁旘傃曗惓偱帪崗僞僌偲媅帡嫍棧應掕抣傪憖嶌偡傞応崌丄摨帪偵斃憲攇埵憡應掕抣傕憖嶌偟側偄偲RINEX巇條堩扙偵側傞婥偑偡傞丅戝晹暘偺揹巕婎弨揰偲堦晹IGS嬊偺娤應僨乕僞偑偙傟偵摉偰偼傑傞丅懡暘懡偔偺夝愅僜僼僩偼栤戣側偔張棟偱偒傞偺偩傠偆偗傟偳傕丅媡偵尵偊偽帪寁旘傃曗惓偵敽偄埵憡應掕抣偵旘傃傪婲偙偡娤應僨乕僞(偙偭偪偑巇條忋惓偟偄)偑偁傞壜擻惈偑偁傞(傑偩尒偨偙偲偼側偄偗傟偳)丅偙偺応崌僒僀僋儖僗儕僢僾偲岆敾掕偝傟偰應埵惛搙偑棊偪偰偟傑偆丅偳偆傕Clock
Steering偺娤應僨乕僞忋偺埖偄偼慡斒揑偵濨枂側揰偑懡偄丅
.....................................................................................................................................
怴僾儘僕僃僋僩奐巒丅擭枛傑偱偵偲傝偁偊偢摦偔偲偙傠傑偱偼峴偒偨偄丅偟偐偟僐乕僪傪彂偔偺偼妝偟偄丅
.....................................................................................................................................
徏塝怶栫偺L/D,乽偼傗傇偝儕儞僋乿: 惉岟, 偍傔偱偲偆偛偞偄傑偡丅挬偐傜JAXA僗僩儕乕儈儞僌拞宲尒偰偰彮偟嫽暠丅娭學幰偑偪傚偭偲慉傑偟偄丅
榑暥丄偦偺懠儕儞僋
惣懞懠, GPS壜崀悈検偺儔僕僆僝儞僨偵傛傞嵞専徹, 揤婥 50姫12崋, pp.909-917, 2003
GEONET54娤應揰GPS-PWV偲僝儞僨PWV偺斾妑RMS岆嵎2.3mm
(2000/1-2000/12)丅GIPSY-PPP夝丅NMF+奀梞壛廳(GOTIC2)+抶墑岡攝悇掕摍,
GT-PPP偵傛傞GPS-PWV偲忦審偑椙偔帡偰偄傞丅堎側傞揰偼抧忋婥埑傗壛廳暯嬒婥壏傪僝儞僨娤應抣傪巊偭偰媮傔偰偄傞揰偔傜偄丅寢嬊偪傖傫偲傗傟偽偙偺掱搙偺惛搙偼弌傞偲偄偆偙偲丅GIPSY偵彑偰傞偲偼巚偭偰偄側偄偑偪傚偭偲偮傑傜側偄寢壥偱偼偁傞丅偟偐偟GT-PPP晝搰偺PWV僆僼僙僢僩偑戝偒偄偺偼尨場傪僉僠儞偲夝愅偟偨曽偑椙偄偐傕偟傟側偄丅
The ION "Red Book" CD-ROM, Volumes 1-6, Global Positioning System,
GPS and Its Augmentation Systems, The Institute of Navigation, 2002
ION榑暥廤CD-ROM撏偔丅奆彮偟屆偄榑暥偩偑摿偵RAIM偵娭偡傞帒椏偑側偐側偐尒偮偐傜偢Vol.V, RAIM傪撉傒偨偐偭偨偺偱拲暥丅儊儞僶$120栫丅
.....................................................................................................................................
GPS偵傛傞壜崀悈検暘晍悇掕 峏怴丅PWV悇掕抣丄崅帪娫暘夝擻(5min)PWV Map傾僯儊摍捛壛丅傂偲傑偢偙傟偱PWV偼偍廔偄丅
榑暥丄偦偺懠儕儞僋
M.Ishihara, GPS Meteorology at Japan Meteorological Agency, CIMO Expert Team on Remote Sensing Upper-Air
Technology and Techniques, 2005
婥徾挕GPS婥徾妛尋媶偺忬嫷曬崘丅屻張棟GPS-PWV偺僝儞僨PWV斾妑RMS岆嵎偱2.32mm(1999/6-2000/5)偲偁傞丅惛搙偼GT-PPP偵傛傞GPS-PWV偲傎傏摨偠丅傗偼傝儕傾儖僞僀儉傗弨儕傾儖僞僀儉偱偙偺掱搙偺惛搙偑弌側偄偲嫞憟椡偼側偄丅戝曄偩偗傟偳儕傾儖僞僀儉/弨儕傾儖僞僀儉偱GPS婳摴/帪寁偺惛搙傪弌偝側偄偲PPP墳梡偼尷傜傟偰偟傑偆丅愭偼挿偄丅
惛枾應埵偺棟榑偲夝愅庤朄偱彂偄偨儌僨儖偵儈僗敪妎丅(堄恾揑側傕偺傕娷傔)尰嵼婥晅偄偰偄傞儈僗偼偄偔偮偐偁傞偺偱壗張偐偱廋惓梊掕丅婥晅偄偰偄側偄儈僗傕偁傞偐傕偟傟側偄偺偱婥晅偐傟偨曽偼偛巜揈捀偔偲桳傝擄偄偱偡丅
.....................................................................................................................................
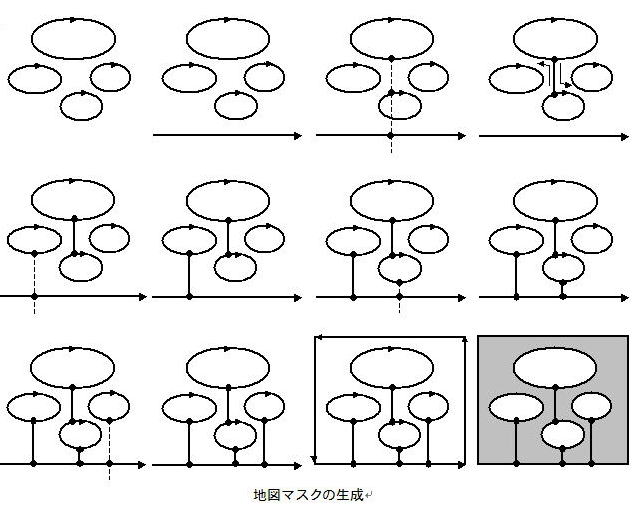
抧恾儅僗僋惗惉傾儖僑儕僘儉妎偊彂偒 (恾)
(1) 壓曈曗彆奀娸慄傪抧恾偵捛壛
(2) 奀娸慄y嵗昗嵟彫揰偐傜壓偵悅慄傪壓傠偟嵟弶偵傇偮偐偭偨懠偺奀娸慄偲暪崌
(3) (2)傪慡偰偺奀娸慄偵偮偄偰孞傝曉偡丅
(4) 埲忋偱慡奀娸慄偑宷偑傞偺偱屻偼塃忋嵍曈傪捛壛丅
壜崀悈検暘晍儅僢僾偺昞帵僇儔乕偑晄惓偲側傞僶僌敪尒丅僶僌廋惓丅
.....................................................................................................................................
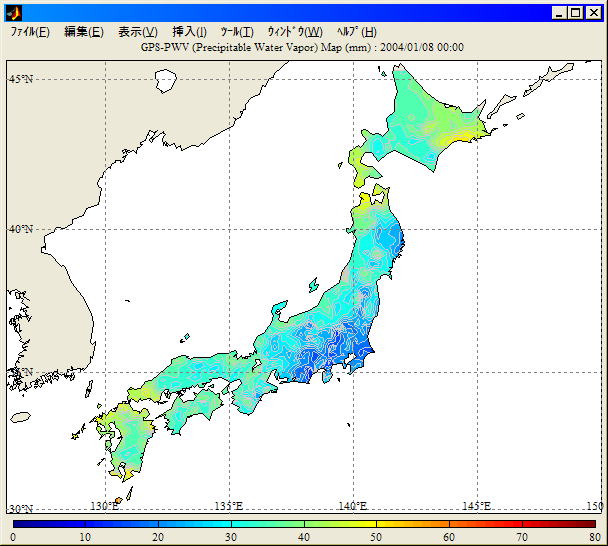
傗偭偲忋庤偔昤偗偨GPS-PWV MAP丅幚偼堦斣戝曄側偺偼奀堟傪敀偔敳偔偲偙傠偩偭偨傝偡傞丅(昤夋僾儘僌儔儉) (11/24 昞帵僇儔乕僶僌桳斉)
.....................................................................................................................................
GT-PPP PWV (940001 抰撪) - Sonde PWV (47401 抰撪) 2004/1/1-12/31斾妑丅婥埑/婥壏偼婥徾挕GPV MSM偐傜丅壛廳暯嬒婥壏偼抧昞婥壏偐傜娙堈幃偱嶼弌丅
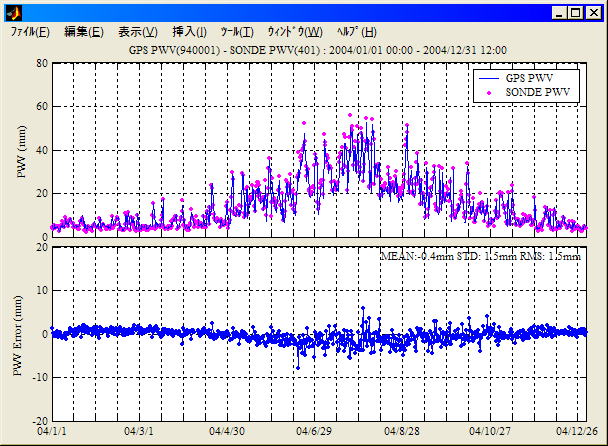
(杮夝愅偵偼崙搚抧棟堾揹巕婎弨揰僨乕僞丄婥徾挕娤應僨乕僞傪巊梡偟傑偟偨)
壜崀悈検(PWV)嶼弌妎偊彂偒 (11/23 GPS偵傛傞壜崀悈検暘晍偵堏摦)
GPS偵傛傞壜崀悈検暘晍悇掕 捛壛丅
.....................................................................................................................................
Amazon偱撏偄偨愱栧彂
G.Xu, GPS Theory, Algorithms and Applications, Springer, 2003
GPS惛枾應埵慡斒偺嫵壢彂丅撍偭崬傒偑懌傜側偄偟儌僨儖傕彮偟屆偄丅7.7.3
Robust Kalman Filter偺庤朄偼弶傔偰抦偭偨丅昅幰偼GFZ偺尋媶幰偺條丅
榑暥丄偦偺懠儕儞僋
R.Ohtani et al., Comparisons of GPS-derived precipitable water
vapors with radiosonde obervations in Japan, J.Geophy.Res, Vol.105, No.D22, pp.26917-26930,
2000
PWV夝愅偺嶲峫偵峸擖$9丅GSI儖乕僠儞夝愅偵傛傞PWV偲儔僕僆僝儞僨PWV斾妑丅RMS岆嵎3.7mm丅GIPSY
PPP PWV斾妑傕偟偰偄傞丅GPS-PWV偵偼悢mm偺宯摑僶僀傾僗偑尒傜傟丄奀梞壸廳挭幀丄儅僢僺儞僌娭悢婫愡曄摦偺塭嬁偱側偄偐偲偟偰偄傞丅
H.Takiguchi et al., GPS observations in Thailand for hydrological
applications, Earth Planets and Space, Vol.52, No.11,
pp.913-919, 2000
傾僕傾儌儞僗乕儞堟偺僞僀偵偍偗傞GIPSY GPS-PWV偲Sonde-PWV斾妑丅RMS岆嵎8.7mm丅昳幙偺埆偄僝儞僨傪彍奜偟慄宍曗娫傪擖傟傞偙偲偵傛傝5mm惛搙偑夵慞偝傟偨偲偟偰偄傞丅
.....................................................................................................................................
媥梴丅偲尵偄側偑傜師偺峔憐傪婘偺慜偱峫偊傞丅
崅帪娫暘夝擻塹惎帪寁悇掕傾儖僑儕僘儉偺偄偄傾僀僨傾偑晜偐傫偩偑撪梕偼旈枾丅IGS昳幙偺崅帪娫暘夝擻帪寁偑摼傜傟傞條偵側傞偲Kinematic
PPP偺墳梡斖埻偑偖偭偲峀偑傞偺偱師偺尋媶僥乕儅岓曗偺堦偮丅
.....................................................................................................................................
堦楢偺敪昞傕廔傢偭偨偺偱摉暘媥梴丅偲尵偄側偑傜師偺峔憐傪楙偭偰偄偨傝偡傞丅
榑暥丄偦偺懠儕儞僋
GPS/MET JAPAN儂乕儉儁乕僕, GPS/MET JAPAN僾儘僕僃僋僩
偢偭偲愊傒巆偟偵側偭偰偄傞GPS壜崀悈検夝愅偺偨傔丅師偵峴偔偨傔偝偭偲廔傢傜偟偰偟傑偍偆丅2004擭暘揹巕婎弨揰
GT PPP-ZTD偼傕偆弌偰偄傞偺偱屻偼PWV曄姺丄僝儞僨斾妑昡壙丄壜帇壔丅
.....................................................................................................................................
嶐擔敪昞偱弌偨婳摴寛掕偵娭偡傞幙栤夞摎偺曗懌(懕偒)
(5)弨揤捀塹惎(QZS)傑偨偼GEO塹惎婳摴寛掕惛搙梊應
婳摴寛掕惛搙偼傎傏娤應岆嵎丄娤應嬊geometry丄塣摦儌僨儖惛搙偱寛傑傝傑偡丅QZS偑GPS偲摨偠條側應埵怣崋傪巊偆偲偡傟偽娤應岆嵎偼GPS偲傎傏摨摍偲峫偊傜傟傑偡偑丄傛傝崅崅搙側偺偱強堗(媡)DOP偑GPS傛傝埆偔側傝傑偡丅傑偨塣摦儌僨儖岆嵎偲偟偰偼懢梲鐃幩埑(SRP)儌僨儖岆嵎偑巟攝揑偱偡丅GPS偵偍偄偰傕SRP儌僨儖偵埶懚偟偰婳摴惛搙偑戝偒偔曄傢傝傑偡丅尰嵼崅惛搙GPS婳摴寛掕偱巊傢傟偰偄傞SRP儌僨儖偼挿婜偺娤應僨乕僞偺惛枾娤應偐傜奐敪偝傟偨宱尡揑側儌僨儖偱偙偺儗儀儖偺儌僨儖傪QZS塣梡奐巒屻偡偖偵巊梡偱偒傞偲偼巚偊傑偣傫丅傑偨QZS偼戝宆傾儞僥僫傪帩偭偰偄偨傝暋嶨側宍忬傪偟偰偄傞偺偱SRP儌僨儖崅惛搙壔偼GPS偵斾妑偟偰傛傝擄偟偄偲巚偄傑偡丅埲忋傪憤崌偡傞偲塣梡奐巒摉弶偱20cm丄2-3擭屻偱10cm埵偑惛搙栚昗偵側傞偲巚偄傑偡丅QZS偱偼塹惎娫應嫍憰抲傗SLR偺棙梡傕専摙偝傟偰偄傞傛偆偱偡偑偦傟傎偳戝偒側惛搙夵慞偵偼寢傃偮偐側偄偺偱偼側偄偐偲巚偄傑偡丅(塹惎娫應嫍偼憡庤埵抲惛搙偵埶懚丄SLR惛搙偼斃憲攇埵憡娤應惛搙偲戝嵎側偄)丅偄偢傟偵偟偰傕塹惎屌桳偺崅惛搙SRP儌僨儖偺奐敪偑key偲側傞偲巚偄傑偡丅(埲忋偡傋偰屻張棟夝愅惛搙偺榖丄儕傾儖僞僀儉惛搙偼摉慠傕偭偲棊偪傞)
(6)LEO塹惎婳摴寛掕
GRACE婳摴寛掕昡壙寢壥偼弮Kinematic PPP偱塣摦儌僨儖偼慡偔擖傟偰偄傑偣傫丅嵟弶偼塣摦儌僨儖傪擖傟側偄偲惛搙偑弌側偄偲巚偭偰Air
Drag儌僨儖摫擖傪梊掕偟偰偄偨偺偱偡偑埬奜娙扨偵惛搙偑弌偰偟傑偭偨偺偱寢嬊GT偵Air
Drag儌僨儖偼擖偭偰偄傑偣傫丅GPS庴怣婡搵嵹LEO塹惎婳摴寛掕偵偼奺庬偺庤朄偑偁傝僩儗乕僪僆僼偺偁傞偲偙傠偱偡丅Kinematic
PPP偼庤寉偵惛搙偑弌偰桳朷偩偲巚偄傑偡偑婔偮偐婥傪偮偗傞揰偑偁傝傑偡丅傑偢惛枾楋帪寁娫妘5暘傛傝嵶偐偄帪娫娫妘偺應埵偼曗娫岆嵎偺偨傔惛搙偑埆壔偟傑偡丅LEO塹惎偼挻崅懍堏摦懱側偺偱僒僀僋儖僗儕僢僾偑柍偔偰傕1傾乕僋30暘掱搙偲側傝傑偡丅1傾乕僋偵娷傑傟傞5暘娫妘僨乕僞偼4-5揰偟偐側偔偦傟偩偗偱埵憡僶僀傾僗傕寛掕偟側偗傟偽偄偗傑偣傫丅枹抦僷儔儊乕僞悢偲娤應僨乕僞悢傪斾妑偟偰傒傟偽傢偐傞條偵忦審偼椙偔側偄偨傔僒僀僋儖僗儕僢僾偼偡偖惛搙傪埆壔偝偣傑偡丅堦斒偵巊偊傞30昩帪寁偲偟偰JPL,CODE偑偁傝傑偡偑IGS偵斾妑偟昳幙偑棊偪傑偡丅傑偨IGS惛枾楋偼應埵夝偺悈暯RMS岆嵎偱1cm傪愗傞掱搙偺昳幙傪帩偭偰偄傑偡偑偨傑偵day
boundary晅嬤偱惛搙偑棊偪傞応崌偑偁傝傑偡丅偙傟偼曗娫岆嵎偺栤戣偐傕偟傟傑偣傫丅埲忋傛傝堦斒揑偵偼塣摦儌僨儖傪巊偭偰僗儉乕僕儞僌傪偐偗傞丄偄傢備傞Reduced-Dynamic朄偺曽偑挿婜偺惛搙埨掕惈偺柺偱偼桳棙偩偲巚偄傑偡丅偁偲拲堄偲偟偰GRACE
LEVEL 1B偵娷傑傟傞JPL婳摴寛掕寢壥偺塹惎埵抲偼岆嵎傪娷傫偩庴怣婡帪寁偵摨婜偟偨抣偱偁傞壜擻惈偑崅偄偺偱塣摦儌僨儖傪巊偭偨婳摴寛掕寢壥傪斾妑偡傞応崌偼偦偺曗惓偑昁梫偵側傞偼偢偱偡丅
...........................
晉巑捠嬤摗巵偺敪昞傪暦偄偰婥晅偄偨偺偩偑phase wind-up偺敪壒偼"儚僀儞僪傾僢僾"偑惓偟偄偺偩傠偆丅壗偱"晽"側偺偐傛偔堄枴偑暘偐傜側偐偭偨偺偩偑"儚僀儞僪傾僢僾"側傜堄枴偑捠偠傞丅
.....................................................................................................................................
GPS/GNSS僔儞億僕僂儉2005 敪昞
墘戣 : 應埵塹惎梡崅惛搙婳摴丒帪寁寛掕僜僼僩僂僃傾偺奐敪丄撪梕偼塅壢楢偲摨偠丅23:30婣戭丅
敪昞偱弌偨婳摴寛掕偵娭偡傞幙栤夞摎偺曗懌
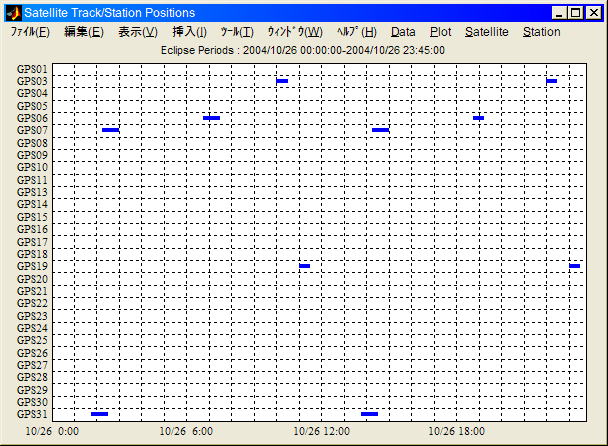
(1)BlockIIR塹惎偺婳摴寛掕
夝愅寢壥偺"GPSnn"偼PRNnn偺堄枴偱偁傝SVNnn偺堄枴偱偼偁傝傑偣傫丅廬偭偰2004/10帪揰偱偼GPS11,
13, 14, 16, 18, 19, 20, 21, 22, 23, 28偑Block
IIR偱偁傝慡偰婳摴寛掕傪峴偭偰偄傑偡丅
(2)CODE RPR儌僨儖偺Block IIR傊偺揔梡偵偮偄偰
妋偐偵CODE尨榑暥偱偼Block II/IIA梡偱偁傞偲拲庍偑偮偄偰偄傑偡丅偨偩偟GT偱偼學悢D0,Y0,B0,Z0偼枹抦僷儔儊乕僞偲偟偰悇掕偟偰偄傑偡偺偱傎傏惛搙楎壔側偔偦偺傑傑巊偊傞傛偆偱偡丅屌掕學悢偼悇掕偟捈偟偨曽偑better偩偲巚偄傑偡偑偦偙傑偱偼梋桾偑側偄偺偱傗偭偰偄傑偣傫丅GT塣摦儌僨儖僜乕僗傪婜娫尷掕偱堦晹岞奐(1,2,3,4)偟傑偡偺偱嶲峫偵偟偰偔偩偝偄丅(11/22岞奐廔椆丅昁梫側曽偼屄暿偵栤偄崌傢偣壓偝偄)
(3)empirical accelaration傑偨偼pseudo stochastic
pulse偵偮偄偰
捠忢batch adjustment偵傛傝婳摴傪fitting偡傞応崌偼儌僨儖岆嵎傪媧廂偡傞偨傔偵擖傟傞偙偲偑懡偄傛偆偱偡丅GT偼EKF側偺偱儌僨儖岆嵎偼僾儘僙僗僲僀僘偲偟偰摫擖偝傟傑偡丅僲僀僘抣偼悇掕傪峴偭偰傒偰嵟揔抣傪寛傔偰偄傑偡丅幚嵺偵悇掕偵巊梡偟偨抣偵偮偄偰偼parameter
estimator偺儘僌傪偛棗壓偝偄丅
(4)怘偺庢埖偄
怘偺庢埖偄偼戝曄擄偟偔婳摴惛搙楎壔偺戝偒側梫場偱偡丅GPS
week 1291偼怘忦審偑戝曄椙偄廡偱偦偺揰偱岞暯側昡壙偱偼柍偄偐傕偟傟傑偣傫丅尰嵼GT偱峴偭偰偄傞怘偺懳墳偼埲壓偺捠傝偱偡偑傑偩廫暘偱偼側偔崱屻夵椙偺梋抧偑桳傞偲擣幆偟偰偄傑偡丅11/15偱偺儕儞僋偺傛偆偵堦晹IGS夝愅僙儞僞偱偼yaw
rate悇掕傪峴偭偰偄傞傛偆偱偡偑GT偱偼傑偩摫擖偟偰偄傑偣傫丅
(a)SRP壛懍搙偵(1-shadow factor)傪妡偗傞丅
(b)post-eclipse maneuver帪偺僾儘僙僗僲僀僘傪巜掕factor攞偡傞丅
(c)eclipse媦傃post-eclipse maneuver帪偺娤應僲僀僘傪巜掕factor攞偡傞丅
(b)偼怘屻30暘掱搙偼懢梲曗懌偺偨傔巔惃偑棎傟傞偺偱SRP儌僨儖岆嵎偑戝偒偔側傞懳墳偱偡丅(c)偼怘媦傃怘屻偼庡偵phase
wind-up偵傛傞戝偒側娤應岆嵎偑嵹傞偨傔娤應僨乕僞偺weight傪壓偘傞偨傔峴偭偰偄傑偡丅巊梡偟偨factor抣偼儘僌傪偛棗壓偝偄丅
偁偲壜曄僗僥僢僾偺integrator傪巊偆応崌偼怘傪旘偽偟偰偟傑偆偙偲偑偁傞偺偱怘擖丒怘弌傪嫬奅忦審偵嬫娫暘妱偟偨曽偑椙偄偲巚偄傑偡丅GT偼屌掕僗僥僢僾integrator側偺偱摿偵壗傕峫椂偟偰偄傑偣傫丅
敪昞偱偼側偔偰杮僒僀僩偵宖嵹偝傟偰偄傞徻嵶撪梕偵偮偄偰偺偛幙栤丄偛巜揈偱偁傟偽丄偱偒傟偽儊乕儖摍偱捈愙栤偄崌傢偣捀偗傞偲桳傝擄偄偱偡丅
.....................................................................................................................................
GPS/GNSS僔儞億僕僂儉2005 敪昞
墘戣 : 斃憲攇埵憡應掕抣偵傛傞惛枾應埵偺棟榑媦傃夝愅張棟
.....................................................................................................................................
榑暥丄偦偺懠儕儞僋
Y.E.Bar-Sever, New GPS attitude model, IGSMAIL-0591, 9 May, 1994
怘婜娫偵偍偗傞GPS婳摴惛搙楎壔偑yaw attitude偺mismodeling偵婲場偡傞偲偟偰怴偟偄GPS
attitude儌僨儖傪採埬偟偰偄傞丅尰嵼偺JPL夝愅偵偼偙傟傜偺儌僨儖偑曇擖偝傟偰偄傞偲巚偆偑丄JPL婳摴偼Block
IIR塹惎偺惛搙偑埆偄偺偱Block IIR偵偼偁傑傝忋庤偔摉偰偼傑傜側偄偺偐傕偟傟側偄丅
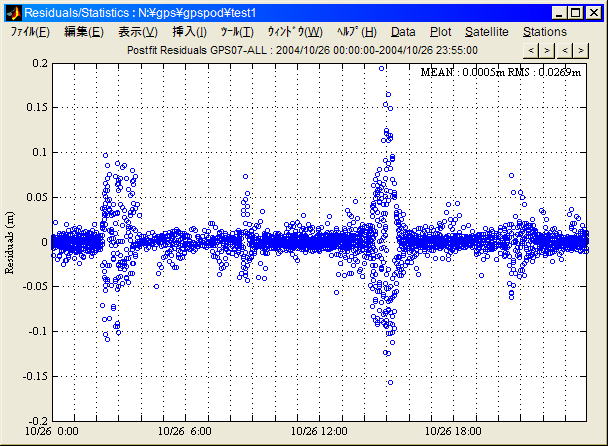
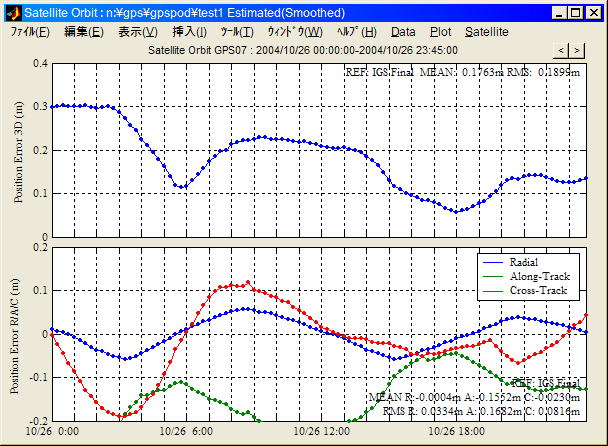
GT偵傛傞怘婜娫偵偍偗傞婳摴悇掕椺(PRN07 2004/10/26,
帠屻巆嵎, 怘婜娫, 悇掕岆嵎)丅偙傟偩偗巆嵎偑戝偒偄偲惛搙偼側偐側偐弌側偄丅怘偲怘偺拞娫偱巆嵎偑戝偒偔側偭偰偄傞偺偼"noon-turn"偺塭嬁偩傠偆偐丅
.....................................................................................................................................
GPS/GNSS僔儞億敪昞帒椏嶌惉丅
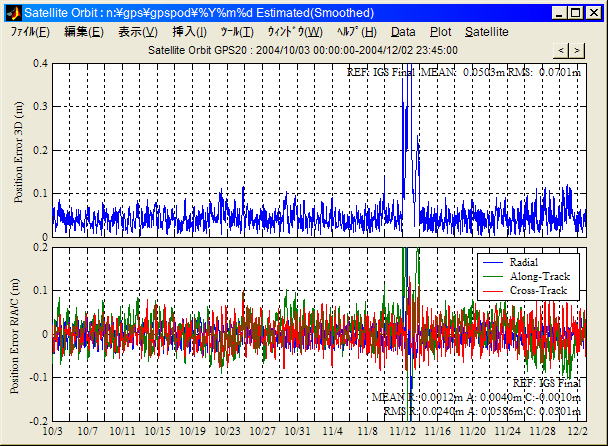
棤偱GPS塹惎婳摴寛掕梊旛昡壙丅塅壢楢偱傕幙栤偑偁偭偨偺偱1擭掱搙偺挿婜惛搙昡壙偺偨傔丅挿婜偱偼塹惎偑愗傝懼傢偭偨傝怘婜娫偵擖偭偨傝偟偰埨掕偟偰惛搙傪弌偡偺偼戝曄丅嬊慖掕傗僷儔儊乕僞僠儏乕僯儞僌傪傗傝捈偡昁梫偑偁傞偩傠偆丅
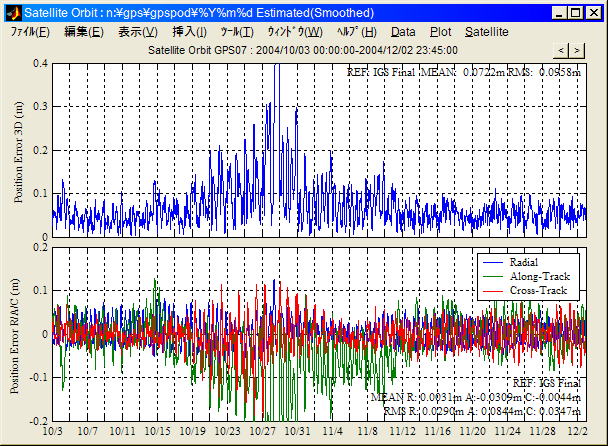
偲傝偁偊偢僷儔儊乕僞傪曄偊偢偵2儢寧掱棳偟偨椺(PRN20 2004/10/3-12/2)丅11/12-13偩偗嬌抂偵惛搙偑棊偪偰偄傞丅尨場偼塹惎偵儌僨儖壔偝傟側偄忥棎偑壛傢偭偨偺偐丅娤應嬊悢偑彮側偄偲偙偺庤偺忥棎偵庛偄丅偁偲尰峴GT偼怘偺庢埖偄偑娒偄丅怘婜娫偵惛搙偑棊偪傞椺(PRN07 2004/10/3-12/2丄怘婜娫10/14-11/11)丅偙偺曈偺挿婜惛搙傪夵慞偡傞偨傔偵偼儌僨儖夵椙偑昁梫偵側傞偐傕偟傟側偄丅
.....................................................................................................................................
堦擔媥梴丅
徏塝怶栫偺L/D, 塅拡奐敪偵憿寃偺怺偄儔僀僞乕徏塝怶栫巵BLOG丅偼傗傇偝偺忣曬偵徻偟偄丅儈僱儖僶偺搳壓幐攕偼巆擮偩偑丄塣梡偟偰偄傞恖払偼偲偰傕妝偟偦偆偩丅
.....................................................................................................................................
堦擔媥梴丅夞傝偼偡偭偐傝廐傜偟偔側偭偰偒偨丅
婓朷傪幐偭偨塅拡僗僥乕僔儑儞擔杮儌僕儏乕儖乽偒傏偆乿戞1夞
懪偪忋偘偼僗儁乕僗僔儍僩儖偺塣峴夞悢師戞, nikkeibp 價僕僱僗僗僞僀儖, 2005
應埵偲娭學側偄塅拡奐敪偺榖戣丅JEM奐敪弶婜偵娭傢偭偰偄偨恖娫偲偟偰暋嶨側巚偄丅傕偆奐敪奐巒偐傜20擭偵側傞丅憗偔寛拝傪偮偗偰傎偟偄丅
.....................................................................................................................................
戞49夞塅拡壢妛媄弍楢崌島墘夛 at 峀搰
應埵塹惎梡崅惛搙婳摴丒帪寁寛掕僜僼僩僂僃傾偺奐敪 敪昞丅
峀搰仺(偺偧傒20)仺柤屆壆仺(偟側偺23)仺墫怟仺彫暎戲丅21:30婣戭丅
.....................................................................................................................................
戞49夞塅拡壢妛媄弍楢崌島墘夛 at 峀搰
揑愳懽愰, 儁儞僔儖儘働僢僩暔岅 擔杮偺塅拡奐敪偺阾柧婜, JAXA, 2005
揑愳愭惗偺島墘偵椡傪栣偆丅偙傟傪暦偗偨偩偗偱偼傞偽傞峀搰傑偱棃偨峛斻偑偁偭偨丅
.....................................................................................................................................
彫暎戲仺墫怟仺(偟側偺6)仺柤屆壆仺(偺偧傒15)仺峀搰丅
戞49夞塅拡壢妛媄弍楢崌島墘夛 at 峀搰
.....................................................................................................................................
GPS/GNSS僔儞億敪昞帒椏丅偙偙偺強暥彂偽偭偐傝偱偄偄壛尭寵偵側偭偰偒偨偺偱婥惏傜偟偵彮偟僐乕僪傪彂偔丅
.....................................................................................................................................
榑暥丄偦偺懠儕儞僋
J.Ray, OTL routine available for testing, IGSMAIL-5238, 24 Oct., 2005
IERS Conventions 2003偺奀梞壸廳儌僨儖偵偼幚憰忋偺懡悢偺濨枂揰偑偁傞丅偲偄偆偙偲偱UCSD
D.Agnew偑昗弨揑側儖乕僠儞採嫙傪巒傔偨偺偱昡壙偟偰傎偟偄偲偺偙偲丅妋偐偵奀梞壸廳偺幚憰偼擄夝偱GT偱偺幚憰傕偁傑傝帺怣偑側偄丅梋桾偑弌棃偨傜昡壙偟偰傒傛偆丅
G.Gendt, GPS IIR-M parameters, IGSMAIL-5223, 5 Oct., 2005
9寧枛偵忋偑偭偨Block IIR-M PRN17偺傾儞僥僫埵憡拞怱僆僼僙僢僩丅IGS昗弨
Block IIR抣偲嬐偐側嵎偟偐側偄偺偱廬棃偺昗弨抣傪巊偆傛偆偵偲偺偙偲偩偑丄z=-10cm偱嬐偐偲偼尵偊側偄條側婥偑偡傞丅
J.Ray, new routine for high-frequency nutation in
polar motion, IGSMAIL-5211, 16 Sep., 2005
IERS Conventions 2003, 5.4.2 high-frequency
nutaion in polar motion儌僨儖梡儖乕僠儞偑IERS偺僒僀僩偐傜棙梡壜擻偵側偭偨偺偙偲丅偙偺岠壥偼dX,dY偺RMS偱17mas掱搙偱IGS
ERP偺嬌塣摦偺岞徧惛搙偵斾妑偟柍帇偱偒側偄偲偟偰偄傞丅
K.Seidelmann, UTC redefinition or change, IGSMAIL-5192, 23 Aug., 2005
偳偆傕ITU偱峴傢傟偰偄傞UTC偺嵞掕媊偺媍榑偺忬嫷曬崘傒偨偄偩偑挿偡偓傞偺偱僷僗丅偄偔偮偐廳梫偦偆側儕儞僋偑挘傜傟偰偄傞丅
G.Gendt, Participation in planned IGS Reanalysis, IGSMAIL-5175, 8 Jul., 2005
IGS偱寁夋偝傟偰偄傞1994偐傜偺慡GPS僨乕僞嵞夝愅偺屇傃偐偗丅怴偟偄傾儞僥僫儌僨儖傪巊偭偰崱擭枛偐傜1擭偔傜偄偐偗偰幚巤偡傞梊掕偲偺偙偲丅
.....................................................................................................................................
弌挘梡帒椏惍棟丅屻偼堦擔媥梴丅
.....................................................................................................................................
斃憲攇埵憡應掕抣偵傛傞惛枾應埵偺棟榑媦傃夝愅張棟 (Web斉) 捛壛丅
榑暥丄偦偺懠儕儞僋
嵶愳, 帪娫丒廃攇悢偵偍偗傞憡懳榑岠壥, 捠怣憤崌尋媶強婫曬 Vol.49, Nos.1/2, 2003
偙偙偱偼夞揮嵗昗宯偱(尒偐偗偺)岝懍搙偑曄傢傞岠壥傪僒僯儍僢僋岠壥偲屇傫偱偄傞丅Ashby偼GPS偵偍偗傞夞揮嵗昗宯偱偺岝懍搙曄壔偼"Sagnac-like
effect"偱偁傞偲彂偄偰偄偨丅傑偁憡懳榑偩偲擄夝偵暦偙偊傞偺偱壓庤偵帩偪弌偝側偄傎偆偑棟夝偼梕堈偱偼偁傞丅
屻摗懠, GPS僐儌儞價儏乕朄, 捠怣憤崌尋媶強婫曬 Vol.49, Nos.1/2, 2003
GPS僐儌儞價儏乕偵傛傞帪崗摨婜媄弍偺徯夘丅CODE
GIM偑0.7TECU偺惛搙偑偁傞偲偺婰弎偑偁傞丅IGS
TEC偺岞徧惛搙偼2-8TECU偱偁傝嵎偑戝偒偄丅偙傟偼娤應嬊偺埵抲偵埶懚偡傞偺偐傕偟傟側偄丅擇廃攇斃憲攇埵憡傪巊偊偽偙傟傜偺惛搙昡壙偼娙扨側偺偱偦偺偆偪傗偭偰傒傛偆偐丅
専嶕暸 捛壛丅偲傝偁偊偢Google偱丅偙傟偱夁嫀偺旛峫榐専嶕偑彮偟妝偵側傞偐丅
.....................................................................................................................................
Amazon偱撏偄偨愱栧彂丅
G.Beutler, Methods of Celestial Mechanics
I: Physical, Mathematical, and Numerical
Principles, Springer, 2005
Beutler偺塹惎婳摴塣摦棟榑戞1晹丅婳摴揱斃偵巊傢傟傞悢抣愊暘偵偮偄偰徻偟偄丅
塅壢楢敪昞帒椏丄姰丅慡40暸丅屻偼GPS/GNSS僔儞億梡敪昞帒椏丅暥彂偼憗偔廔傢傜偣偰僐乕僪傪彂偒偨偄丅
應埵塹惎梡崅惛搙婳摴丒帪寁寛掕僜僼僩僂僃傾偺奐敪,
戞49夞塅拡壢妛媄弍楢崌島墘夛(敪昞帒椏) up丅GT愰揱帒椏丅
.....................................................................................................................................
榑暥丄偦偺懠儕儞僋
G.Blewitt, An automatic editing algorithm for GPS data, Geophys. Res. Lett., Vol.17, No.3, pp.199-202,
1990
僒僀僋儖僗儕僢僾曇廤偵娭偡傞屆揟揑榑暥丅屆偡偓偰僆儞儔僀儞偱墈棗丒峸擖偱偒側偄偺偱幚傪尵偆偲僆儕僕僫儖傪撉傫偩偙偲偑側偄丅懡偔偺夝愅僜僼僩偺僒僀僋儖僗儕僢僾曇廤偼偙傟偺垷棳丅GT傕傾儗儞僕偟偰偄傞偑婎杮偼偙傟丅15擭慜偺僥僋僯僢僋偑崱偩偵庡棳偲偄偆偺傕壗偩偲偼巚偆丅儕傾儖僞僀儉媦傃1廃攇懳墳偺僒僀僋儖僗儕僢僾曇廤僥僋僯僢僋偭偰偳偙偐偵柍偄偐側丅
T.Bae et al., Data Screening and Quality Analysis for Kinmematic
Orbit Determination of CHAMP Satellite, ION NTM, 2002
CHAMP POD偵偍偗傞僒僀僋儖僗儕僢僾曇廤丅POD偼抧忋嬊偲偺3廳嵎僉僱儅僥傿僢僋丅惛搙3D
RMS 15-25cm丅偦偺懠僆僴僀僆廈棫戝SPIN(Satellite Positioning and Inertial Navigation)
Lab丅LEO POD娭學偑懡偄丅偦偆偄偊偽CHAMP偺僨乕僞偼僟僂儞儘乕僪偟偰彮偟偩偗昡壙偟偨偺偩偑GRACE偵斾傋僨乕僞昳幙偑埆偔惛搙偑弌側偄偺偱曻偭偰偍偄偨傑傑偵側偭偰偄傞丅偣偭偐偔僨乕僞偵傾僋僙僗偱偒傞傛偆偵側偭偨偺偱偦偺偆偪偪傖傫偲昡壙偟偨偄丅
忋偺帒椏偱POD寁嶼帪娫2H偱懍偄偲彂偄偰偁傞偑PPP側傜傕偭偲懍偄丅GT PPP偼5暘娫妘24H偱30昩丄30昩娫妘偱傕5暘丅擇廳嵎傗嶰廳嵎偼抧忋娤應僨乕僞偑昁梫偱柺搢偩偟抶偄丅傗偼傝LEO塹惎POD偵偼PPP偑埑搢揑偵桳棙偩偲巚偆丅偱傕崱偼IGS昳幙偺30昩帪寁偑柍偄偺偑僱僢僋丅偙傟偼僉僱儅僥傿僢僋PPP偱偼旔偗偰捠傟側偄榖側偺偱崱屻偺尋媶僥乕儅偲偟偰柺敀偄丅
.....................................................................................................................................
榑暥丄偦偺懠儕儞僋
B.W.Tolman et al., The GPS Toolkit - Open Source GPS Software, ION GNSS, 2004
僥僉僒僗戝僆乕僗僠儞偱奐敪偝傟偨GPSTk偲屇傇GPS夝愅梡僆乕僾儞僜乕僗儔僀僽儔儕丅尵岅偼C++丄STL巊梡丅峴楍墘嶼丄懳棳寳儌僨儖丄僒僀僋儖僗儕僢僾曇廤丄嵟彫擇忔丄奺庬儐乕僥傿儕僥傿摍偑娷傑傟偰偄傞丅Octave
Binding傕偁傞丅Download僒僀僩偼偙偙丅偪傖傫偲挷傋偰側偄偑姰惉搙偑傑偩掅偄傛偆偩丅
J.Barnes et al., OpenSourceGPS A starting point for learning
about GPS with Open Source Software
僆乕僾儞僜乕僗偺GPS僜僼僩僂僃傾庴怣婡僾儘僕僃僋僩丅RF,庴怣夞楬偼巗斕昳傪夵憿偟偰偄傞傛偆偩丅
.....................................................................................................................................
帪寁偺掕媊偑傑偩惍棟偱偒側偄丅惛枾應埵偱巊傢傟傞帪寁偑塹惎搵嵹帪寁傗庴怣婡帪寁偦偺傕偺偱偼側偄怓乆側僆僼僙僢僩傪娷傫偩儁乕僷乕帪寁偱偁傞偙偲偼娫堘偄側偄丅偟偐偟夞楬抶墑丄儅儖僠僷僗丄嬊敪埵憡偑暋嶨偵棈傓偺偱偦偺掕媊偼擄偟偄丅愭偵up偟偨夝愢榑暥偱傕帪寁偵娭偟偰偼偐側傝岆杺壔偟偑偁傞丅岆杺壔偟偑暘偐偭偨恖偼帺暘偱僉僠儞偲傕偺傪峫偊傞恖偩偲巚偆偑悽偺拞偦偆偄偆恖偑彮側偄偺偼崲偭偨偙偲偩丅
PPP妎偊彂偒 婳摴曗娫(2), 帪寁偺掕媊(1) 捛壛丅
.....................................................................................................................................
11寧梊掕
2005/11/04 GPS/GNSS僔儞億僕僂儉2005島墘尨峞乊愗
2005/11/09-11/11 戞49夞塅拡壢妛媄弍楢崌島墘夛 at 峀搰
2005/11/16-11/18 GPS/GNSS僔儞億僕僂儉2005 at 搶嫗奀梞戝 墇拞搰
.....................................................................................................................................
| Home | by T.Takasu |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}