| 精密測位の理論及び解析手法 Precise Positioning Theory and Analysis |
2010/04/06 |
Home |
目次
・GPS/GNSSの基礎・原理・応用
・精密単独測位の技術動向と応用
・RTK-GPS及びネットワーク型RTK-GPS測位技術
・RTK-GPS用プログラムライブラリRTKLIBの開発・評価および応用
・RTK-GPS測位の基礎とプログラミング
・電離層モデルと電子密度分布(TEC)推定
・リアルタイムキネマティック(RTK)測位の基礎と実装
・搬送波位相測定値による精密測位の理論及び解析処理
GPS/GNSSの基礎・原理・応用 2010/04/06追加
GPS/GNSS Bases, Principles and Applications
Abstract
GPS観測データを用いて測位,電離層電子密度(TEC)の変動,湿潤大気による伝搬遅延量変動など目的に応じた解析方法を習得する.GPS/GNSSの基礎・原理・応用1日, 精密測位の基礎・原理・応用1日。
高須, GPS: Global Positioning System Part 1, 東北大 2009年度GCOE地球惑星計測スクール
(PDF, 3839KB)
高須, GPS: Global Positioning System Part 2, 東北大 2009年度GCOE地球惑星計測スクール
(PDF, 2616KB)
精密単独測位の技術動向と応用 2010/04/06追加
Precise Point Positioning (PPP) and Its Applications
Abstract
GPS/GNSSによるPPP (精密単独測位) の技術動向 (キネマティックPPP, リアルタイムPPP, 整数バイアス決定, GLONASS/ Galileo対応,衛星による補正情報配信等) とその応用分野、技術課題や限界について最新の研究に基づき簡単に紹介する。
高須, 精密単独測位の技術動向と応用, 東北大 2009年度GCOEフロンティアセミナー (PDF, 1778KB)
RTK-GPS及びネットワーク型RTK-GPS測位技術
RTK-GPS and Network-RTK positioning technology
Abstract
RTK-GPS(realtime kinematic GPS)はGPS衛星の測位信号を使ってリアルタイムで利用者受信機の位置をcmレベルの精度で決定する精密測位技術である。既にRTK-GPSは、精密測量、工事施工管理、地図作成、地殻変動計測、移動体位置計測をはじめとする多数の応用分野で利用されている。一般的なGPS測位では利用者受信機単独で解を得る、いわゆる単独測位の手法をとるが、RTK-GPSでは固定点に設置された基準点(基地局)と移動受信機(ローバー)双方の主に搬送波位相観測値を使って基線解を求める相対測位の手法を取る。基準点の観測データは通常無線通信リンクを使って移動受信機に送信されて即時に測位解が求められる。ここで搬送波位相観測値に含まれる整数バイアス決定手法が高精度化するための技術上のポイントであり過去多数の研究がなされてきた。近年になり高性能の高速(OTF: on-the-fly)整数バイアス決定手法が開発されてRTK-GPSがより実用的な精密測位技術に発展してきたと言える。さて従来型のRTK-GPSでは利用者自身で基準点を設置・運用する必要があった。また基準点−移動受信機間の距離、すなわち基線長が10〜20kmを越える中長基線条件で主に大気圏の影響でその性能が悪化するという問題があった。RTK-GPSのこれらの制限を緩和して利用者により使いやすい精密測位サービスを提供する目的で1990年代後半からネットワーク型RTK-GPSの研究開発が行われてきた。ネットワーク型RTK-GPSは測位サービス提供者が運用する地域的に分散した複数の基準点(基準点ネットワーク)の観測データを使ってRTK-GPS用補正情報を生成して利用者に提供することにより、利用者受信機単独で精密測位を実現する技術である。本稿では、RTK-GPS及びネットワーク型RTK技術の基礎について解説する。
高須, RTK-GPS及びネットワーク型RTK-GPS測位技術, Text for GPS/GNSS Symposium 2007, p.267-278
(PDF, 325KB)
高須, RTK-GPS及びネットワーク型RTK-GPS測位技術, GPS/GNSSシンポジウム2007 発表資料 (PPT,
343KB)
RTK-GPS用プログラムライブラリRTKLIBの開発・評価および応用
Development, Evaluation and Application of
RTK-GPS program library RTKLIB
Abstact
RTK-GPS(realtime kinematic GPS)はGPS/GNSS衛星から送信された測位信号を使って受信機位置をcmレベルの精度で測る精密測位技術である。RTK-GPSは既に精密測量、建築工事管理、地図作成、移動体精密位置決定等、色々な分野で利用されている。今のところRTK-GPS用受信機が高価である等の理由で必ずしも一般測位用として普及している訳ではないが、今後民生用L2、L5信号を備えた近代化GPS衛星や準天頂衛星、Galileo、GLONASS等、利用可能な他のGNSS衛星の数が増えるにつれて、その適用可能領域が拡大し、今まで通常の測位技術では精度が十分でなかった分野を中心に、更なる応用が期待されている。筆者らはRTK-GPSをはじめとする精密測位アルゴリズムの評価や応用研究を進める上で共通的なツールとして使用できる汎用の測位演算用プログラムライブラリを開発した。このプログラムライブラリをRTKLIBと呼んでいる。本稿ではRTKLIBの開発、評価、応用および今後の拡張予定について紹介する。
高須他, RTK-GPS用プログラムライブラリRTKLIBの開発・評価および応用, Text for GPS/GNSS Symposium 2007, p.213-218
(PDF, 543KB)
高須他, RTK-GPS用プログラムライブラリRTKLIBの開発・評価および応用, GPS/GNSSシンポジウム2007 発表資料 (PPT,
6752KB)
| RTK-GPS測位の基礎とプログラミング Basics of RTK-GPS Positioning and Its Programing |
2006年度東京海洋大ゼミ資料 (その(2)欠番)
・その(1) (ppt 47KB)
・その(3) (ppt 55KB)
・その(4) (ppt 1799KB)
・その(5) (ppt 34KB)
・その(6) (ppt 229KB)
・その(7) (ppt 859KB)
・その(8) (ppt 74KB)
・その(9) (ppt 55KB)
・その(10) (ppt 521KB)
RTKLIB マニュアル(ver.1.1) (pdf 251KB)
RTKLIB性能評価結果 (pdf 11.6MB)
| 電離層モデルと電子密度分布(TEC)推定 Ionosphere Models and Total Electron Content (TEC) Estimation |
Abstract
GPS/GNSSからの測位信号が電離層を通過する際に受ける影響が搬送波周波数に依存する事を利用して二周波の測位信号観測値を使って電離層の総電子数(TEC)を推定することが出来る。本稿ではTEC推定に使用される電離層モデル及び推定手法につき解説を行っている。
........................................................................................
解説資料
高須知二, 電離層モデルと電子密度分布(TEC)推定, (PowerPoint 1.5MB)
Ionosphere Models and Total Electron Content
(TEC) Estimation
実装例
プログラムパッケージ :
tecdemo.zip (ver.0.2)
プログラム説明 :
GPS/GNSS観測による電離層電子密度分布(TEC)推定アルゴリズムのデモ用実装。パラメータ推定は2周波擬似距離測定値を使用した最小二乗法。TECモデルはlocalモデル及びglobalモデル。衛星/受信機DCB(擬似距離バイアス)はTECモデル係数と同時推定。
ファイル:
・testtec.m : TECDEMO試験用ドライバ(サンプル)
・tecdemo.m : TEC推定アルゴリズムデモ
・tecmodel.m : local/global TECモデル
・readrpos.m : 観測局位置読み込み
・readrnx.m : RINEX観測データ/航法メッセージ読み込み
・gshhs_l.mat : 海岸線地図データ (NOAA GSHHSデータベース)
実行環境 : Matlab(5.x,6.x,7.x)
サンプル実行結果 :
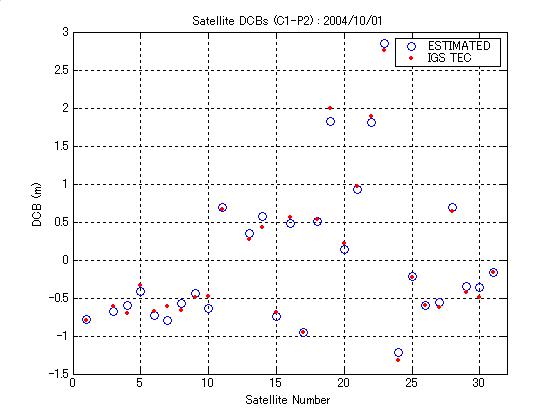
・推定時刻 : 2004/10/1 1:00〜23:00GPST, 2H間隔
・観測局 : 電子基準点49局(localモデル), IGS60局(globalモデル)
・観測データ : 推定時刻前後1H分 2周波擬似距離データ
・モデル次数 : 8次(localモデル), 10次(globalモデル)
・結果 :
localモデル : TEC map, 衛星DCB, 受信機DCB
globalモデル : TEC map, 衛星DCB, 受信機DCB, 衛星DCB-IGS DCBs比較(C1-P1)
(DCBは観測局#1受信機DCB=0とした相対値)
| リアルタイムキネマティック(RTK)測位の基礎と実装 Basics and Implementations of Real-Time Kinematic (RTK) Positioning |
Abstract
リアルタイムキネマティック(RTK)はリアルタイム移動体精密測位技術であり一般的には搬送波位相測定値の二重差を使った相対測位が使用される。本稿では高速整数不定性決定(AR)技術を含め、RTKで使われる基礎アルゴリズムについて解説を行っている。
.........................................................................................
解説資料
高須知二, リアルタイムキネマティック(RTK)測位の基礎と実装,
(PowerPoint 1.51MB)
Basics and Implementations of Real-Time Kinematic
(RTK) Positioning
内容
・RTK測位の基礎
・整数不定性決定
・RTK測位アルゴリズムの実装
実装例
プログラムパッケージ:
rtkdemo.zip (ver.0.1)
プログラム説明:
GPS/GNSSによるリアルタイムキネマティック(RTK)測位アルゴリズムのデモ用実装。パラメータ推定は二重位相差を使用した拡張カルマンフィルタ、整数不定性決定はLAMBDA/MLAMBDA法による。サイクルスリップ/アウトライア検出は未実装。基準衛星は最初のエポックの最大仰角衛星に固定。
ファイル:
・testrtk.m : RTKDEMO試験用ドライバ(サンプル)
・rtkdemo.m : リアルタイムキネマティック(RTK)測位アルゴリズムデモ
・mlambda.m : LAMBDA/MLAMBDA整数不定性決定
・readrnx.m : RINEX観測データ/航法メッセージファイル読み込み
実行環境:Matlab(5.x,6.x,7.x) or Octave(2.1.x)+Octave-forge(matlab互換ライブラリ)
サンプル実行結果:
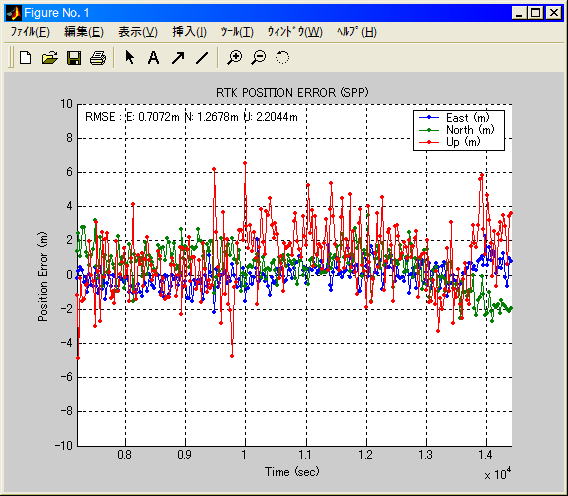
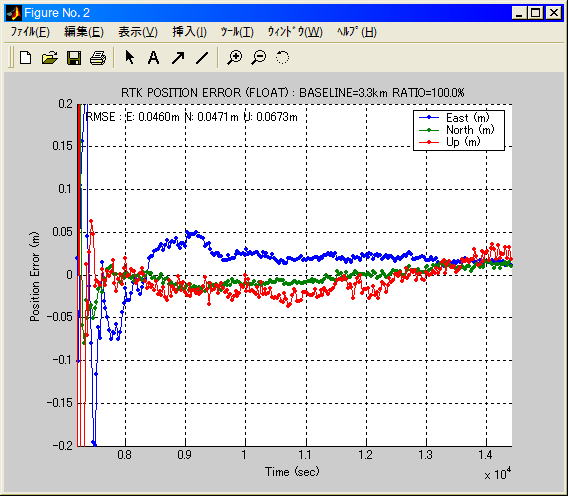
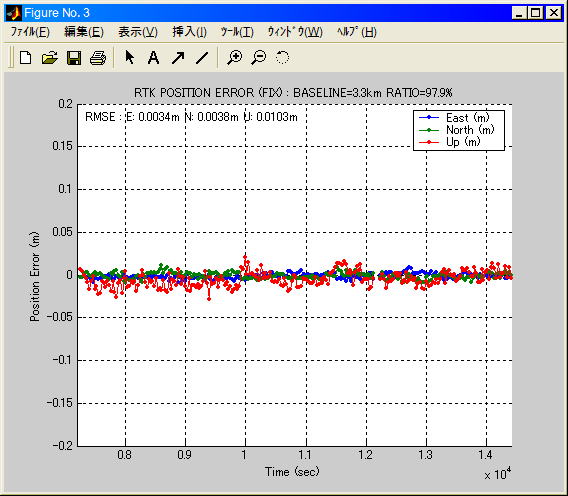
・測位時間:2005/04/02 2:00-4:00 GPST, 30秒間隔
・基線:GSI電子基準点 三浦2(960759)(固定点)
- 三浦1(93040)(基準点) (基線長:3.3 km)
・結果:単独測位解 FLOAT解 FIX解 (測位誤差 GSI F2解比較)
(解析には国土地理院電子基準点データを使用しました)
| 搬送波位相測定値による精密測位の理論及び解析処理 Precise positioning theory and analysis with carrier-phase measurements |
Abstract
本稿ではGPS/GNSSによる精密測位の理論及び解析処理の手法について解説する。ここで精密測位とは一般にGPS/GNSSの搬送波位相測定値を使用した高精度測位技術を指している。最初に精密測位の理論として搬送波位相の定義と精密測位に使用される各種精密モデルにつき解説する。ここで精密モデルには、幾何学距離、衛星軌道・衛星時計誤差、電離層遅延、対流圏遅延、アンテナ位相中心、観測局位置変動、Phase Wind-up効果、相対論効果、マルチパス・観測誤差等が含まれる。次に精密測位に使用される未知パラメータ推定手法として最小二乗法およびカルマンフィルタについて概略を紹介する。次に最も一般的な精密測位である相対測位の原理と手法そしてその応用について説明する。ここで相対測位における主要課題である整数不定性決定問題については他稿に譲り詳しくは述べない。また精密単独測位(PPP)の原理と手法、その応用について触れる。最後にサイクルスリップ検出・修正を含めた精密解析の実際について解説し、筆者が現在開発中の精密解析ソフトウェアGpsTools (GT) を使って解析を実施した例についても紹介する。
.........................................................................................
搬送波位相測定値による精密測位の理論及び解析処理
(Web版) 6/12更新
Precise positioning theory and analysis with
carrier-phase measurements
A.4.1 はじめに
A.4.2 精密測位のモデル
A.4.3 パラメータ推定の手法
A.4.4 相対測位
A.4.5 精密単独測位(PPP)
A.4.6 精密解析の実際
A.4.7 おわりに
A.4.付 座標系の定義と変換
参照文献
.........................................................................................
高須知二, 搬送波位相測定値による精密測位の理論及び解析処理,
GPS/GNSSシンポジウム2005, チュートリアルセッション,
(PDF 863KB)
Precise positioning theory and analysis with
carrier-phase measurements
高須知二, 搬送波位相測定値による精密測位の理論及び解析処理,
GPS/GNSSシンポジウム2005, チュートリアルセッション(発表資料),
(PowerPoint 689KB)
Precise positioning theory and analysis with
carrier-phase measurements
| 頁 | 項番 | 誤 | 正 |
|---|---|---|---|
| 274 | A.4.2.3 | ...ただし0.1 sec程度の時間内では衛星時計は十分に安定であると考えられるのでその程度の時刻差であれば近い時刻の精密暦の値をそのまま使用しても誤差は無視できる。... | ...ただし0.1 sec程度の時間内では衛星時計は十分に安定であると考えられるのでその程度の時刻差であれば精密暦を補間した値を使用しても誤差は無視できる。... |
| 291 | A.4.6.5 | |LGk-LGk-1|>(1-f12/f22) ΔImax / (tk-tk-1) | |LGk-LGk-1|>(1-f12/f22) ΔImax * (tk-tk-1) |
| 278 | 式(A.4.13) | Δpcvr = - PCV(Az,El) | Δpcvr = + PCV(Az,El) |
| 280 | A.4.2.11 | ...対流圏遅延補正残差 等 Unknownなファクターを合計して... | ...対流圏遅延補正残差, 精密暦誤差等 Unknownなファクターを合計して... |
| 287 | A.4.5.1 | ... ここでrr,ZWD,NLC,...はそれぞれ tk+1における観測更新前推定値, dt0は... | ... ここでrr,ZWD,NLC,...はそれぞれ tkにおける観測更新後推定値, dt0は... |
{kind=link}
{kind=link}
{kind=link}
{kind=link}