{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
IGS P1-P2僶僀傾僗抣(塹惎) (2004/1/1-2004/12/31) (昞帵僾儘僌儔儉)
|
GPS偵傛傞惛枾扨撈應埵(PPP)偵娭偡傞妎偊彂偒 |
Return |
栚師
丒PPP偺尨棟
丒PPP偲憡懳應埵偺斾妑
丒婳摴曗娫(1)
丒婳摴曗娫(2) 11/1捛壛
丒帪寁曗娫
丒婔壗嫍棧儌僨儖
丒嵗昗曄姺曗惓
丒帪寁悇掕
丒媅帡嫍棧僶僀傾僗
丒娤應僲僀僘儌僨儖
丒應埵儌乕僪偵傛傞帪娫姶搙偺嵎
丒Static PPP偵偍偗傞嬊埵抲僾儘僙僗僲僀僘僷儔儊乕僞
丒Clock Steering偵敽偆媅帡嫍棧娤應抣偺旘傃
丒僒僀僋儖僗儕僢僾曇廤(1)
丒僒僀僋儖僗儕僢僾曇廤(2)
丒僒僀僋儖僗儕僢僾曇廤(3)
丒僆儞儔僀儞GPS惛枾夝愅僒乕價僗
丒帪寁偺掕媊(1) 11/1捛壛
惛枾扨撈應埵(PPP)偼GPS惛枾塹惎婳摴丄帪寁悇掕抣偲斃憲攇娤應僨乕僞傪巊偭偰婎弨嬊傪巊傢偢偵惛枾應埵傪峴偆庤朄偱偁傞丅忦審偵傕傛傞偑堦斒揑側擇廳埵憡嵎傪巊偭偨憡懳應埵偲傎傏摨摍掱搙偺應埵惛搙偑摼傜傟傞丅
.....................................................................................................................................
| 崁栚 | 惛枾扨撈應埵(PPP) | 憡懳應埵 | 旛峫 | |
|---|---|---|---|---|
| 婎杮娤應検 | 僛儘嵎斃憲攇埵憡 | 擇廳埵憡嵎 | ||
| 巊梡塹惎楋 | 惛枾楋(婳摴丒帪寁) | 惛枾楋(婳摴)丄曻憲楋 | ||
| 婎弨嬊 | 晄梫 | 昁梫 | ||
| 寛掕嵗昗 | 悽奅應抧宯偵傛傞愨懳嵗昗 | 婎弨嬊憡懳嵗昗 (婎慄儀僋僩儖) | ||
| 揹棧憌抶墑曗惓 | 2廃攇偵傛傞曗惓 | 2廃攇曗惓(挿婎慄)丄曗惓側偟(抁婎慄) | ||
| 斃憲攇埵憡僶僀傾僗 | 幚悢抣悇掕 | 惍悢壔偵傛傞惛搙岦忋 | ||
| 應埵惛搙 | kinematic | TBD | TBD | |
| 抁婜static | TBD | TBD | 1H | |
| 挿婜static | 悈暯3mm丄悅捈6mm | 悈暯3mm,悅捈6mm+婎慄挿亊1ppb | 24H | |
| 墳梡暘栰 | 僌儘乕僶儖丒儘乕僇儖抧妅曄摦寁應 GPS婥徾妛丄帪崗摨婜 |
堦斒應埵 儘乕僇儖抧妅曄摦寁應 |
||
.....................................................................................................................................
婳摴曗娫(1)
IGS惛枾楋偺婳摴偼15暘娫妘偺塹惎埵抲偟偐梌偊傜傟側偄偺偱15暘傛傝抁偄娫妘偱悇掕傪峴偆応崌曗娫傪峴偆昁梫偑偁傞丅傑偨塹惎-娤應嬊偺婔壗嫍棧傪媮傔傞嵺偵塹惎懍搙偑昁梫偵側傞偨傔塹惎埵抲偐傜懍搙傪悇掕偡傞昁梫偑偁傞丅偙傟傜偺曗娫丄懍搙悇掕惛搙偼捈愙應埵惛搙偵塭嬁傪媦傏偡偨傔曗娫傾儖僑儕僘儉偑廳梫偱偁傞丅GT偱偼崅惛搙偺曗娫傪峴偆偨傔惛枾塹惎塣摦儌僨儖傪巊偄偰婳摴曗娫傪峴偭偰偄傞丅GT偵偍偗傞婳摴曗娫傾儖僑儕僘儉偼埲壓偺捠傝偱偁傞丅
丒塹惎埵抲(抧媴屌掕嵗昗)傪嵨嵎丒復摦儌僨儖偲抧媴夞揮僷儔儊乕僞偵傛傝姷惈嵗昗宯偵曄姺偡傞丅
丒曗娫娫妘枅偵惛枾塹惎塣摦儌僨儖偵傛傞忢旝暘曽掱幃偺2揰嫬奅抣栤戣傪夝偔丅偡側傢偪曗娫娫妘椉抂偺塹惎埵抲傪惛枾楋偵堦抳偝偣傞傛偆愭摢帪崗偺塹惎懍搙傪媮傔傞丅
丒2揰嫬奅抣栤戣偺夝朄偲偟偰偼偄傢備傞慱偄寕偪朄傪巊偭偰偄傞丅弶婜抣偲偟偰偼嵟弶偺嬫娫偼埵抲偲帪崗嵎偐傜嶼弌偟偨奣嶼抣丄師嬫娫埲崀偼慜嬫娫偺廔揰懍搙傪巊偆丅忢旝暘曽掱幃偺悢抣夝朄偲偟偰偼屌掕僗僥僢僾4師Runge-Kutta傪巊梡偟偰偄傞丅
丒惛枾塹惎塣摦儌僨儖偲偟偰偼埲壓偺愛摦傪峫椂偟偰偄傞丗抧媴廳椡8師丄寧丒懢梲廳椡丄懢梲鐃幩埑儌僨儖CODE(屌掕僷儔儊乕僞)丄怘儌僨儖=墌摏儌僨儖
丒埲忋偱媮傑偭偨曗娫揰偺塹惎埵抲媦傃懍搙(姷惈嵗昗)傪嵞搙丄嵨嵎丒復摦儌僨儖媦傃抧媴夞揮僷儔儊乕僞偵傛傝抧媴屌掕嵗昗偵曄姺偡傞丅
埲忋偺曗娫傾儖僑儕僘儉偺曗娫岆嵎偼塣摦儌僨儖偺嬤帡岆嵎偑巟攝揑偱偁傝奣偹儮a*t2/2(儮a:壛懍搙岆嵎)偱媮傔傞偙偲偑偱偒傞丅GT偺応崌塣摦儌僨儖偺嬤帡岆嵎偼懢梲鐃幩埑儌僨儖偺岆嵎偱寛傑傞丅GPS塹惎婳摴偵偍偄偰懢梲鐃幩埑壛懍搙偼奣偹10-7m/s2偱偁傝屌掕僷儔儊乕僞偵傛傞岆嵎傪10%偲尒愊傕傞偲壛懍搙岆嵎偼儮a=10-8m/s偲側傞丅曗娫嬫娫偺拞揰偱嵟傕曗娫惛搙偑埆偔側傞偺偱偙偺揰偱偺曗娫岆嵎偼10-8m/s2亊450s2/2=1mm偲側傞丅偙偺曗娫岆嵎偼惛枾楋惛搙5cm埲壓偵斾傋廫暘彫偝偄偺偱柍帇偱偒傞丅
側偍埲忋偺傛偆偵惛枾塣摦儌僨儖傪巊傢側偄曗娫偼慡偰曗娫岆嵎偵敽偆惛搙楎壔偑寽擮偝傟傞丅
婳摴曗娫偵偮偄偰曗懌
GT偱偼塣摦儌僨儖偱曗娫偡傞娭學忋丄塹惎埵抲偼偄偭偨傫姷惈嵗昗偵曄姺偟嵞搙抧媴屌掕嵗昗偵栠偟偰偄傞丅埲慜偼偳偆偣栠偡偺偩偐傜偲偙偺嵗昗曄姺帪偺抧媴夞揮僷儔儊乕僞傪0偵屌掕偟偰偄偨偺偩偑丄PPP帪偺巆嵎傪夝愅偡傞偲曗娫抣巊梡epoch偺抣偑柧傜偐偵戝偒偔惛搙傪棊偲偟偰偄傞帠偑妋擣偱偒偨偺偱丄尰嵼偼IERS
Bulletin B傪巊偭偰偄傞丅偁偲15暘娫妘偱忢旝暘曽掱幃嫬奅抣栤戣傪夝偄偰偄傞娭學偱曗娫帪娫偑寢峔偐偐傞丅29塹惎1擔暘傪30昩娫妘偵曗娫偡傞偺偵栺30暘丅廬偭偰PPP帪偵偼geneph.m傪巊偭偰帠慜偵曗娫偟偨婳摴傪巊偆昁梫偑偁傞丅
婳摴曗娫偵偮偄偰偺曗懌(2)
婳摴曗娫偵偮偄偰偼堦斒偵偼儔僌儔儞僕僃曗娫丄僗僾儔僀儞曗娫摍偑巊傢傟傞偙偲偑懡偄丅17師儔僌儔儞僕僃曗娫偱mm惛搙傪払惉壜擻偲偺曬崘傕偁傞丅偙傟傜偺曗娫惛搙偵偮偄偰偼崱屻昡壙梊掕偱偁傞丅
.....................................................................................................................................
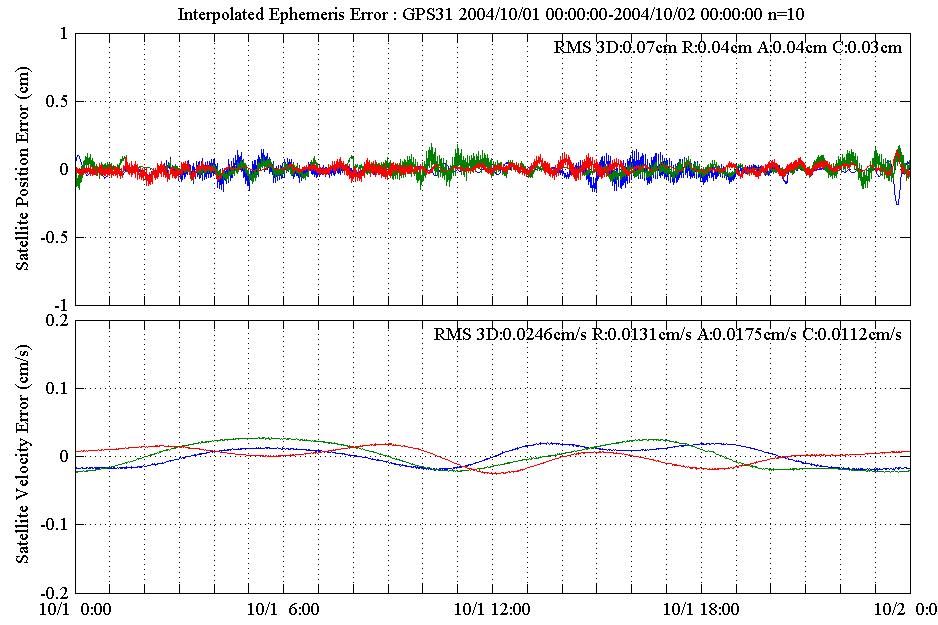
惛枾楋偺塹惎婳摴曗娫偼堦斒偵偼儔僌儔儞僕僃曗娫摍偺懡崁幃曗娫偑巊傢傟傞偙偲偑懡偄丅埲壓惛枾楋曗娫惛搙偺昡壙傪峴偭偨丅
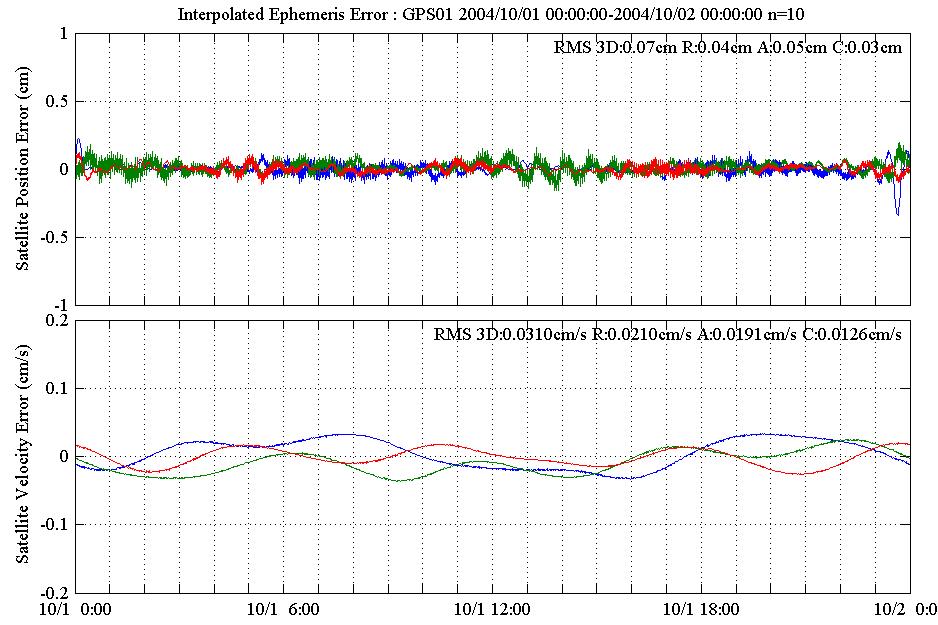
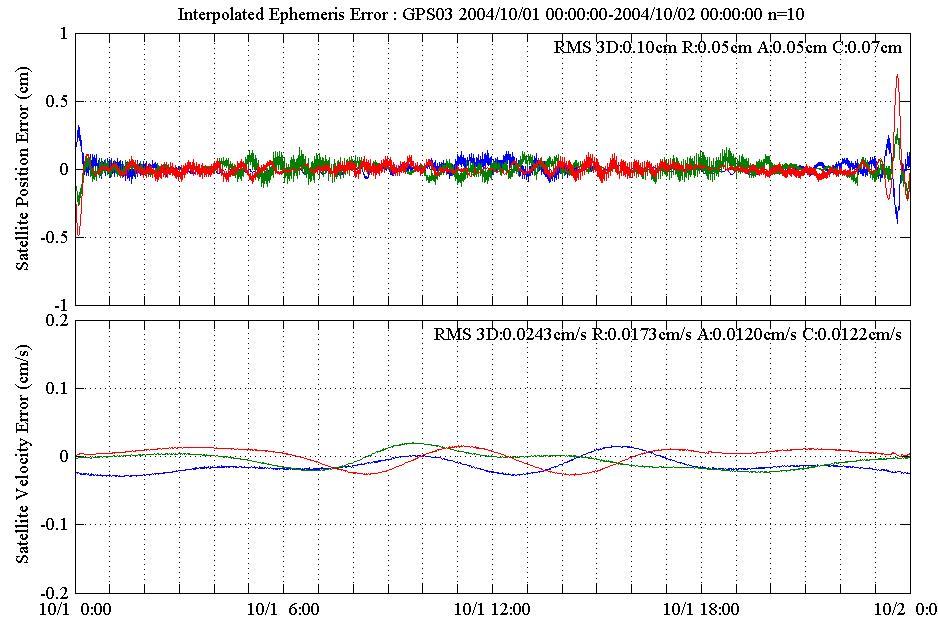
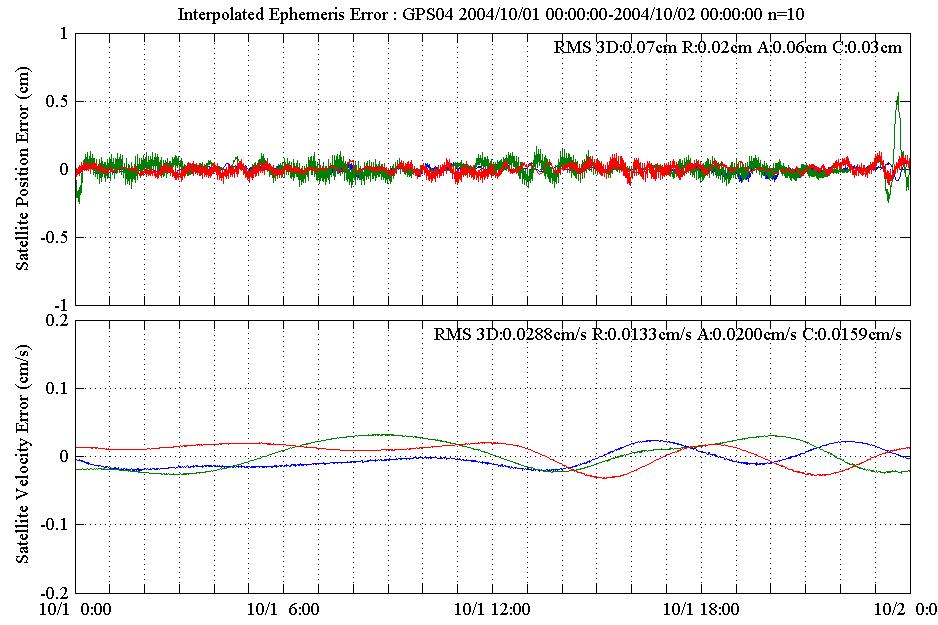
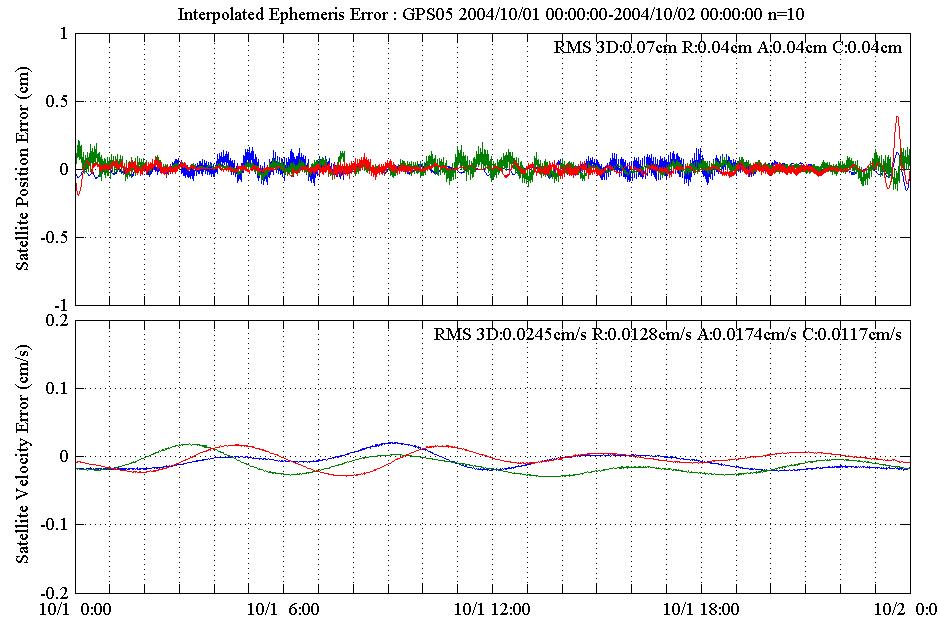
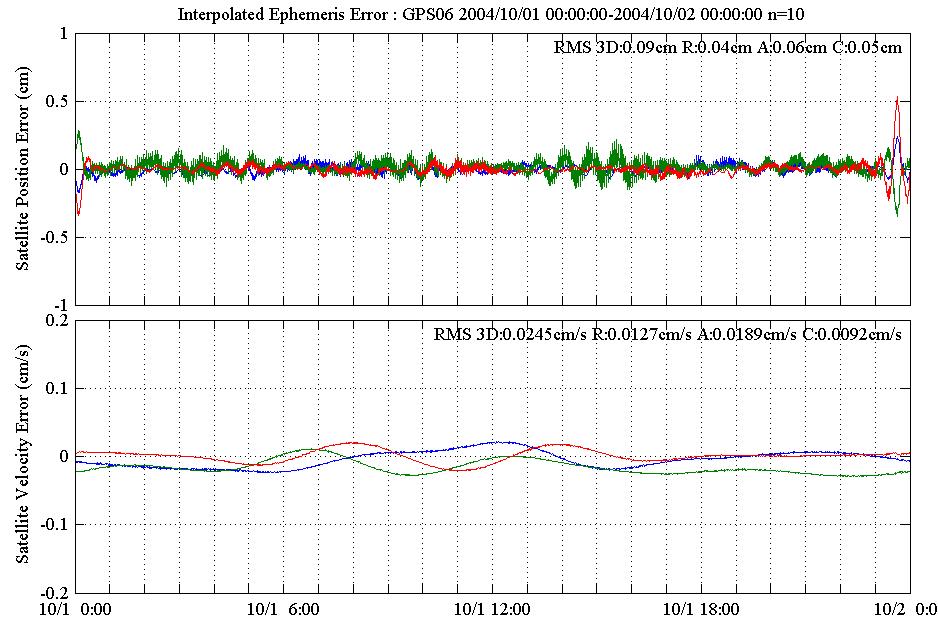
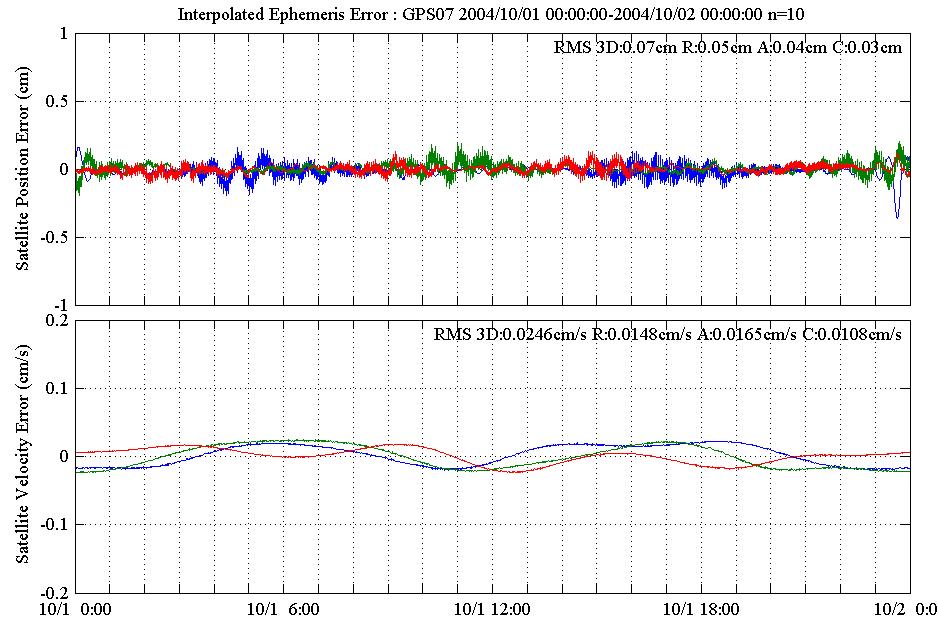
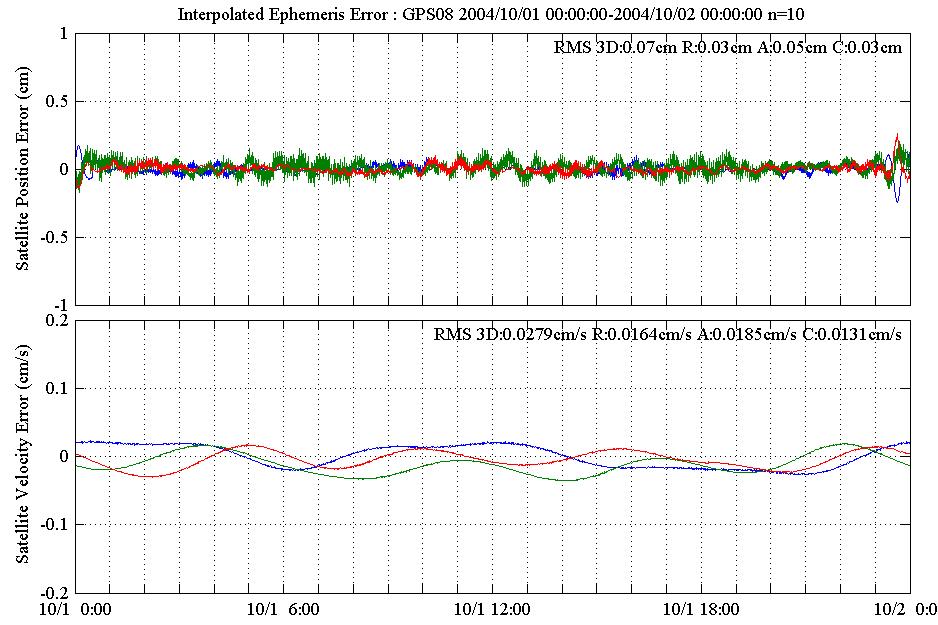
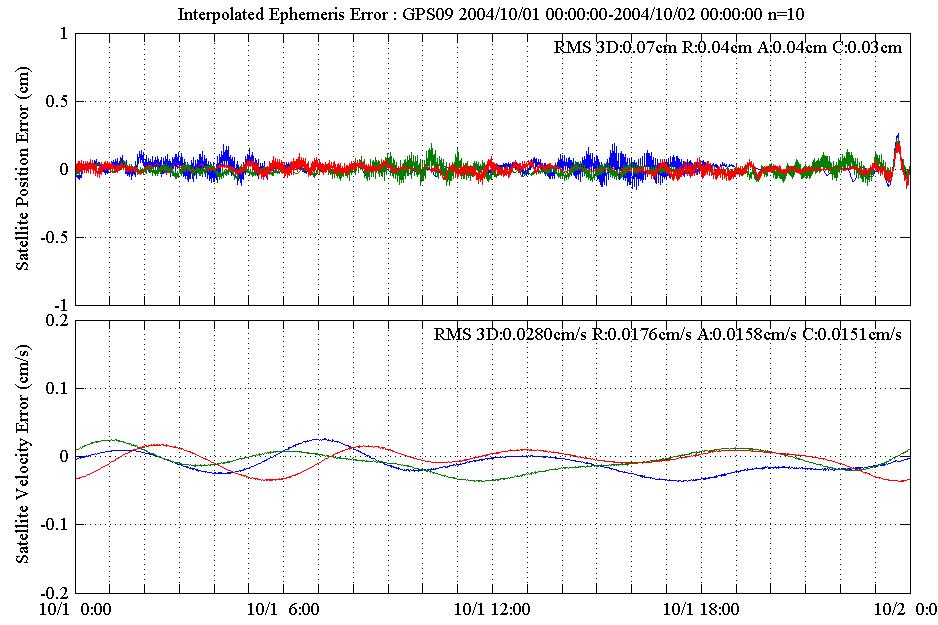
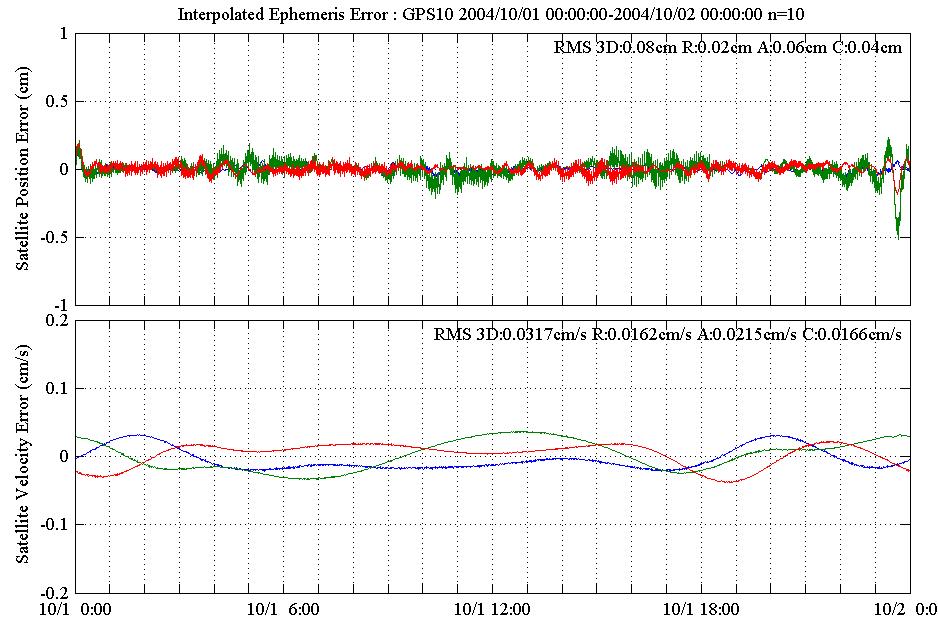
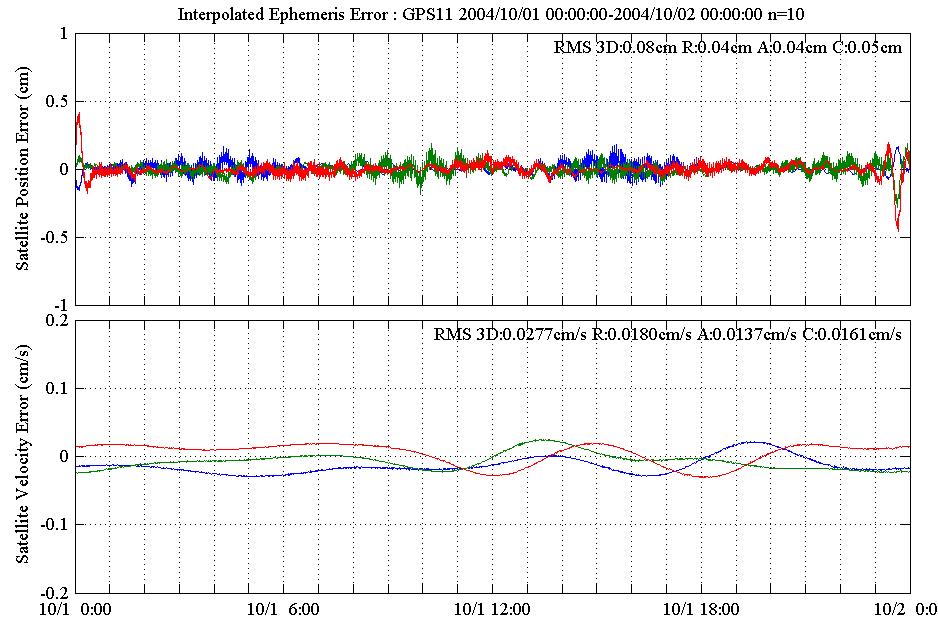
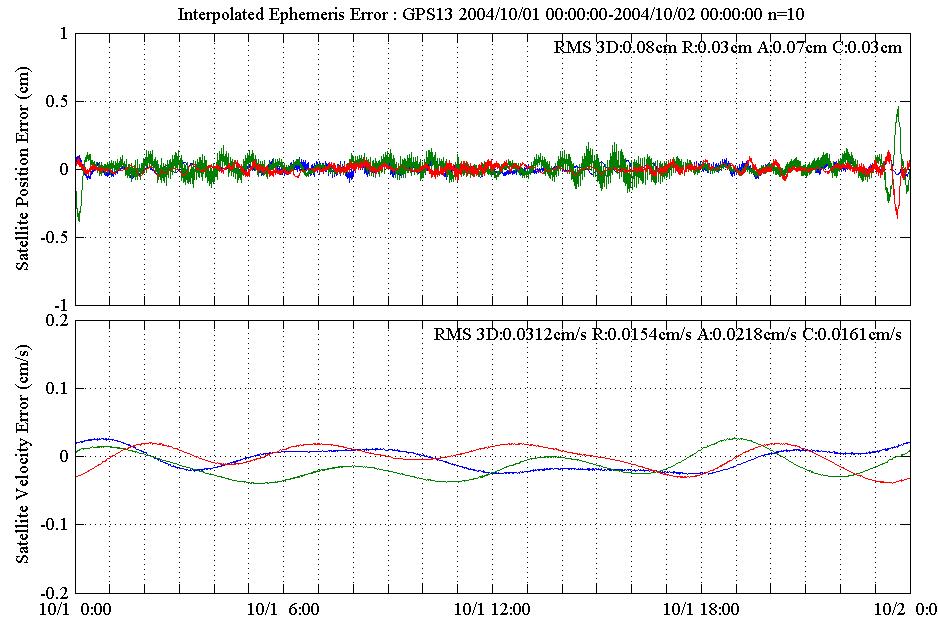
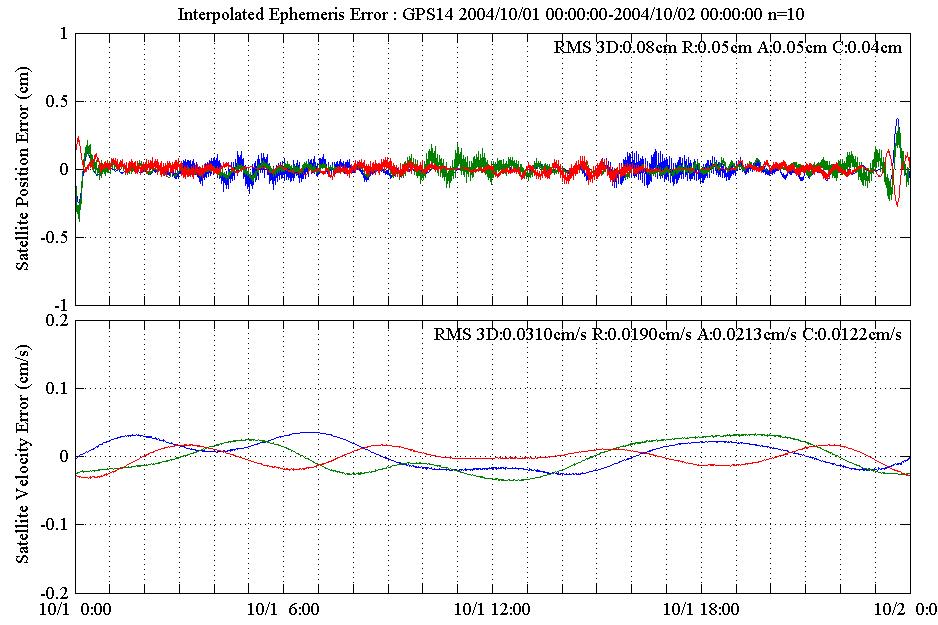
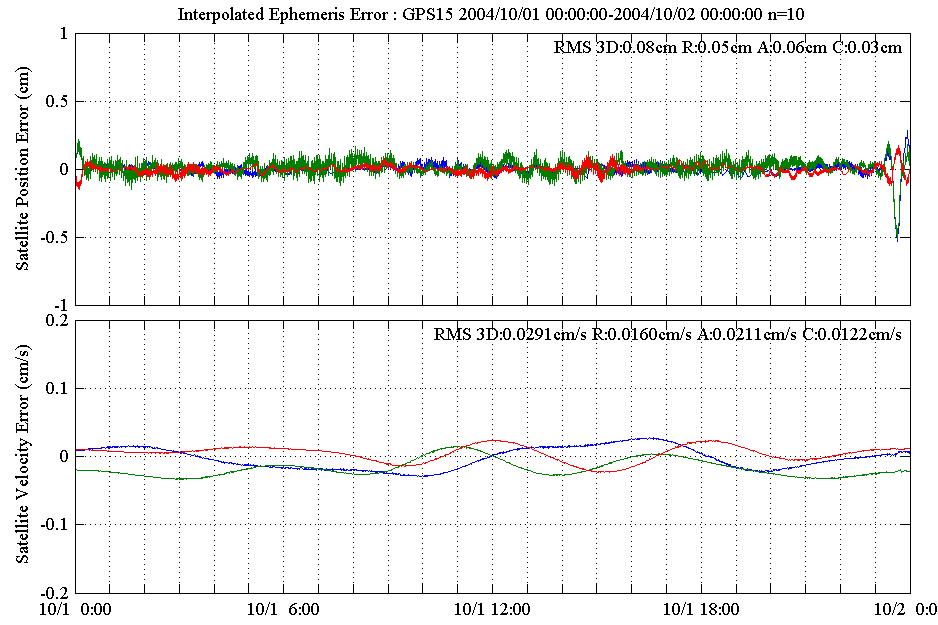
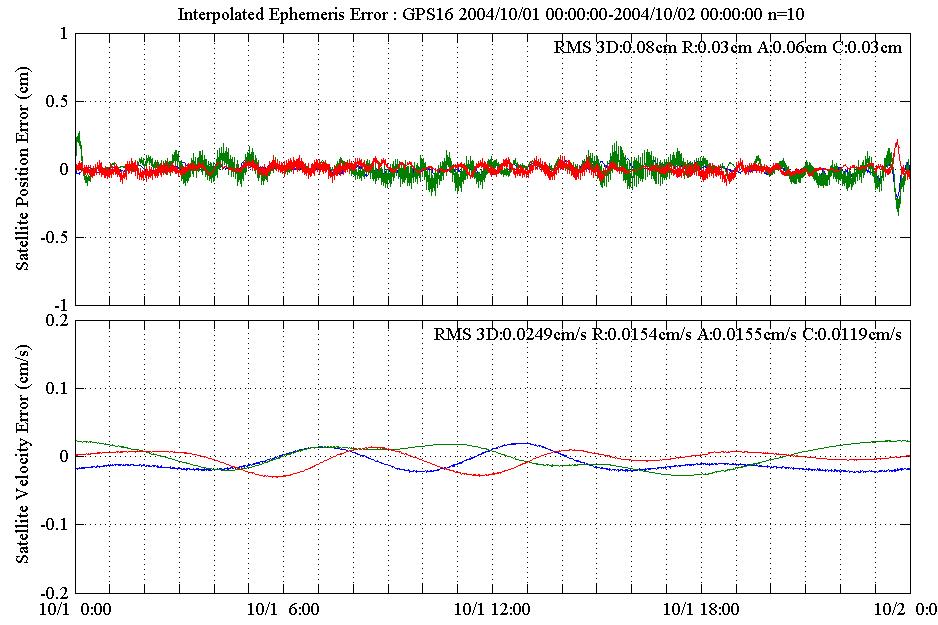
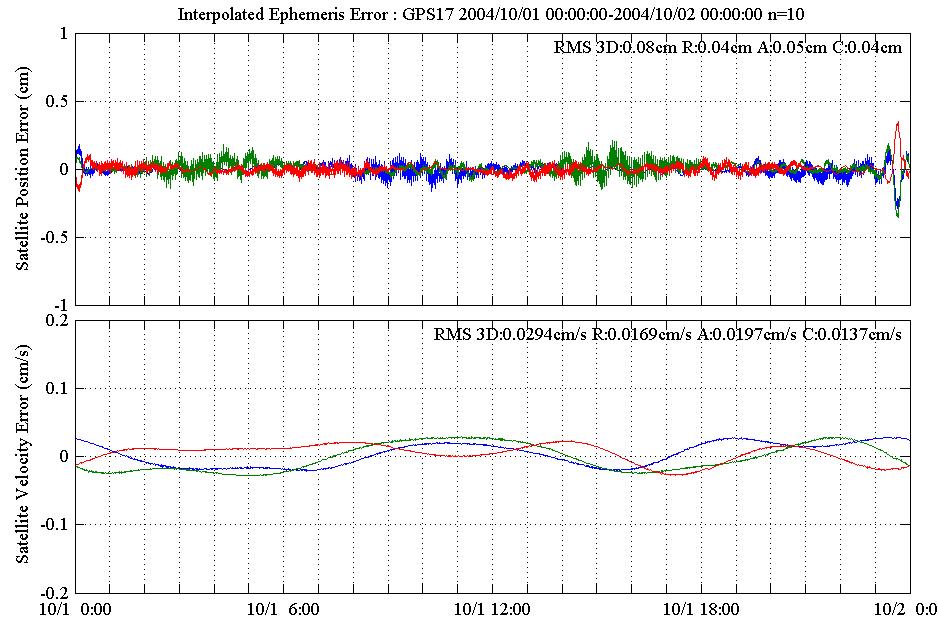
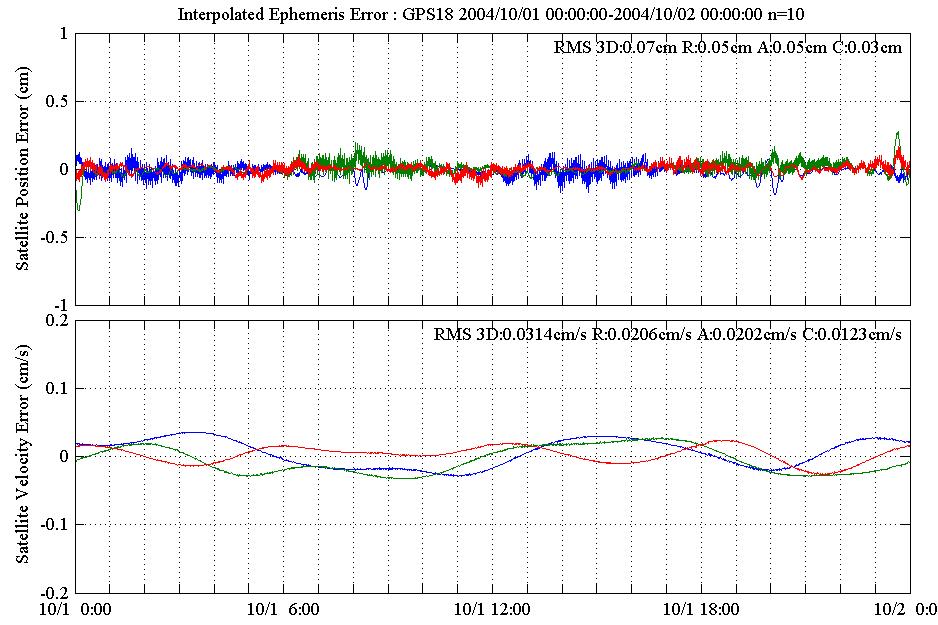
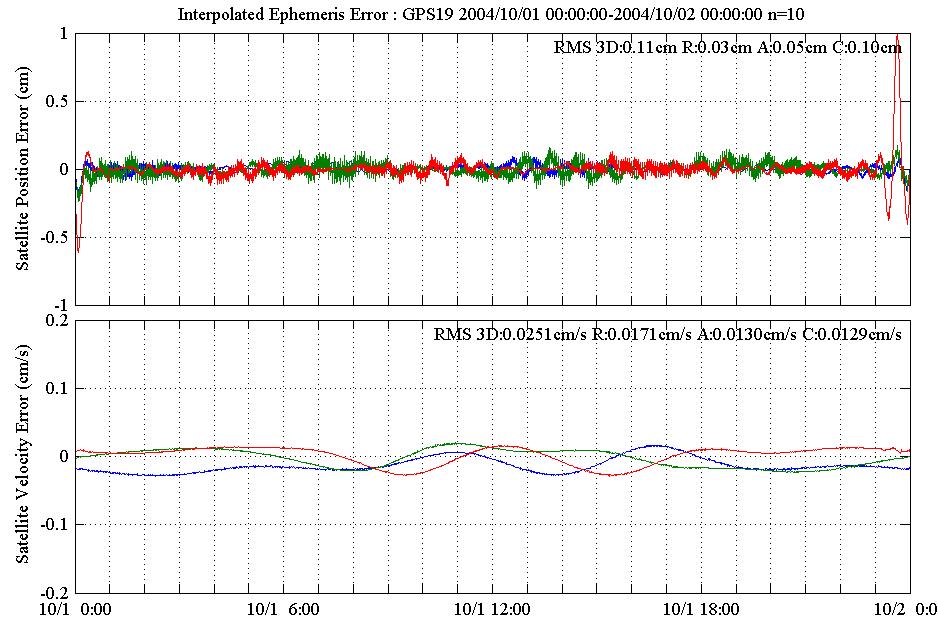
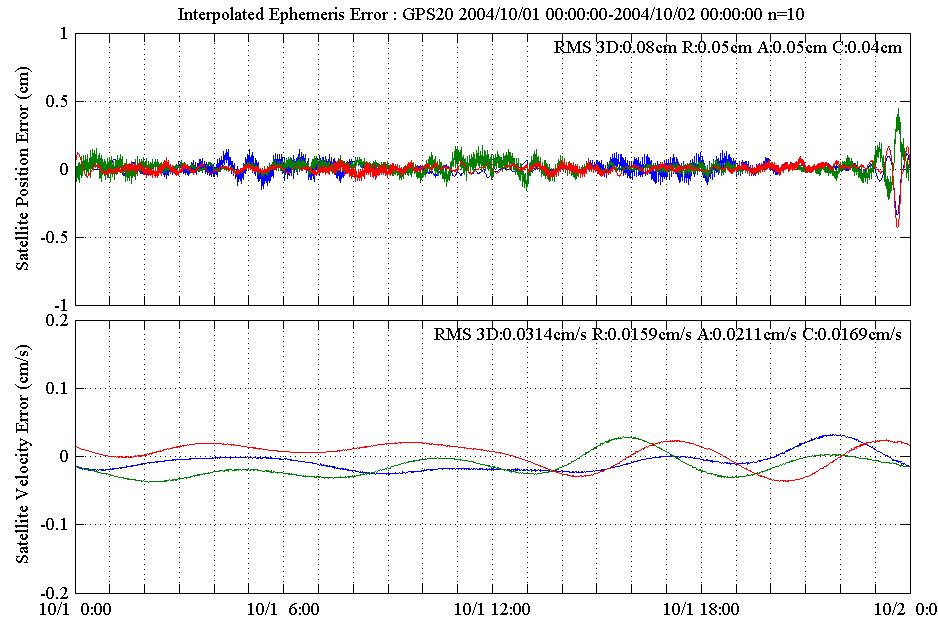
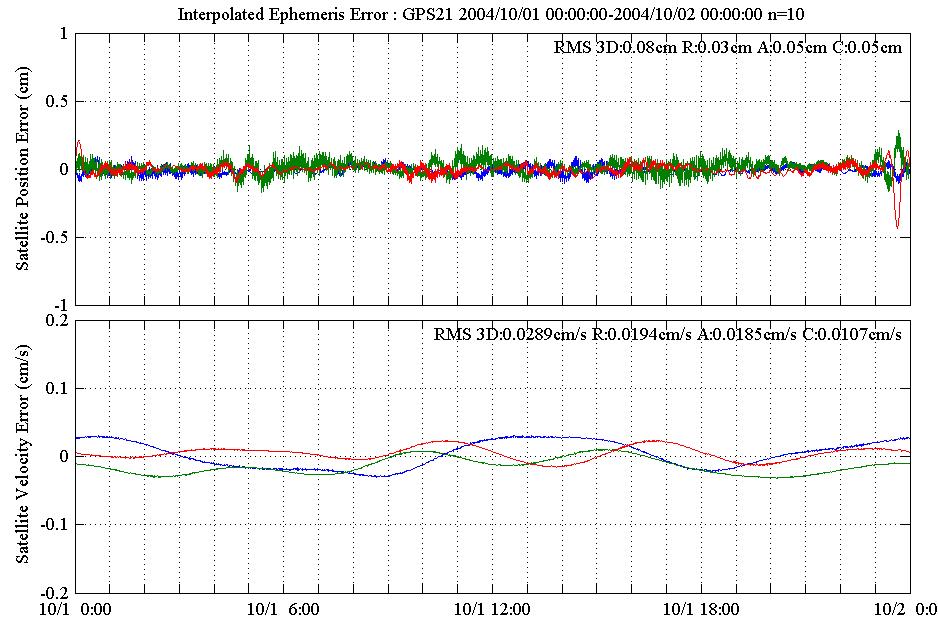
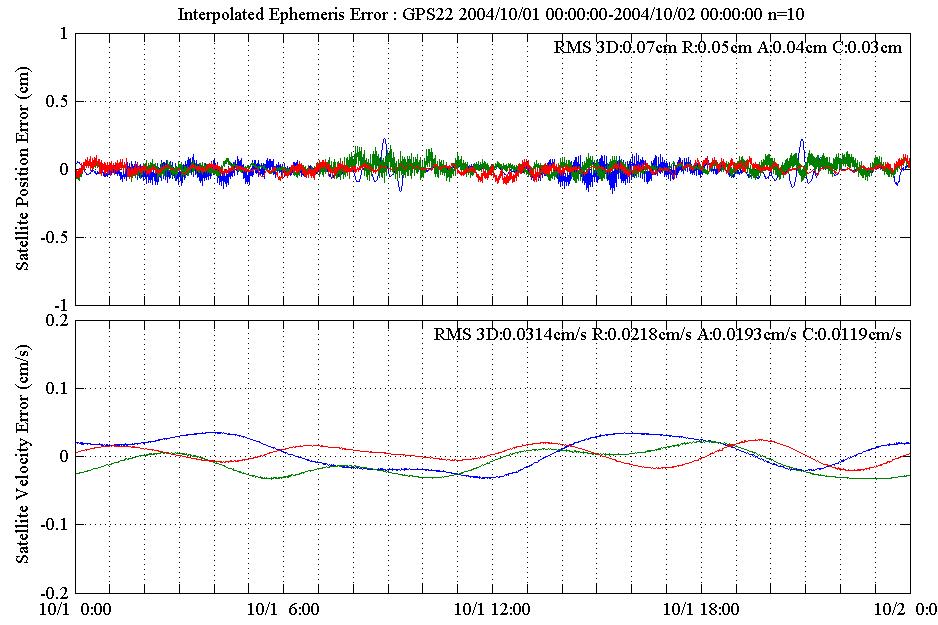
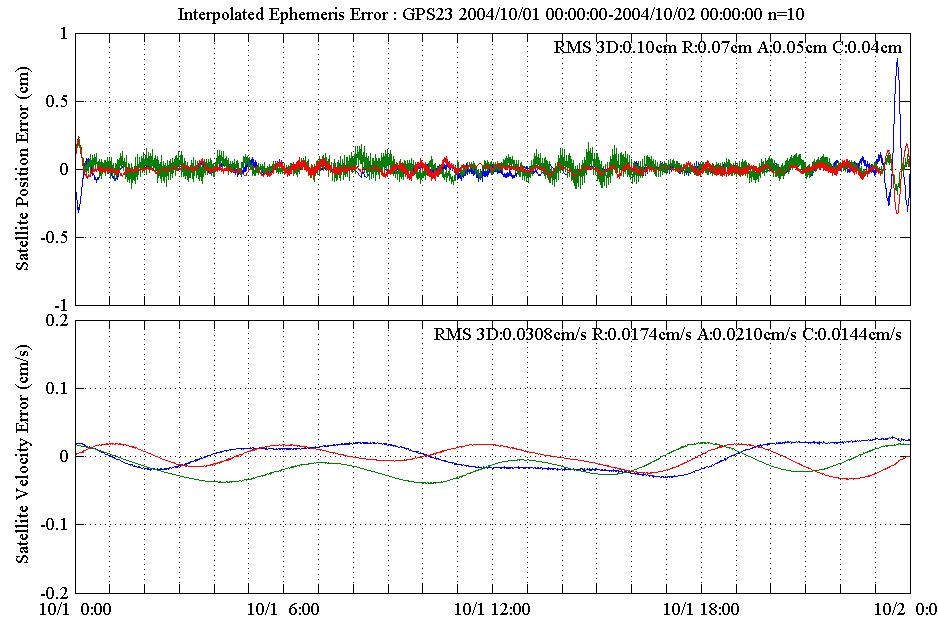
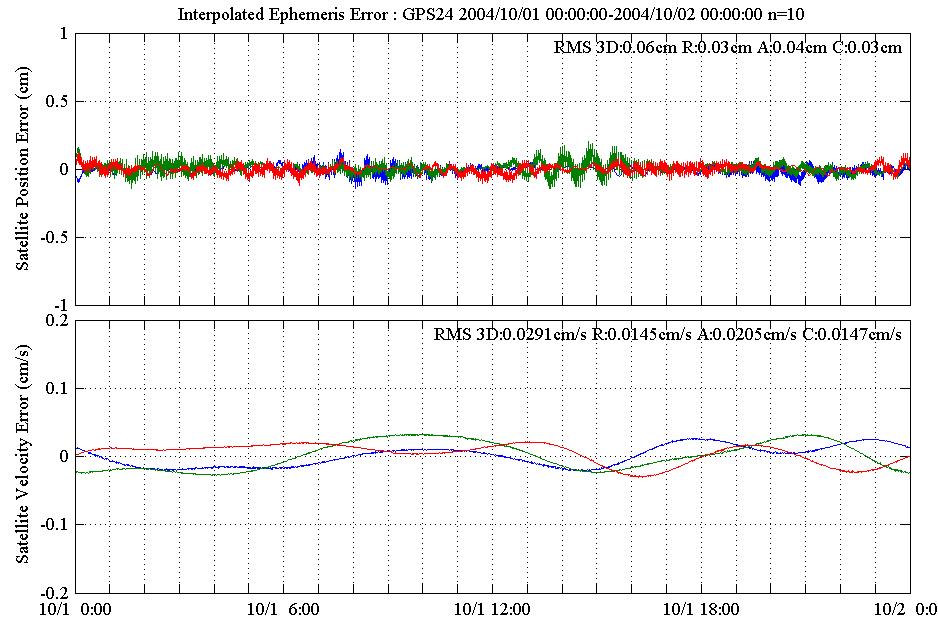
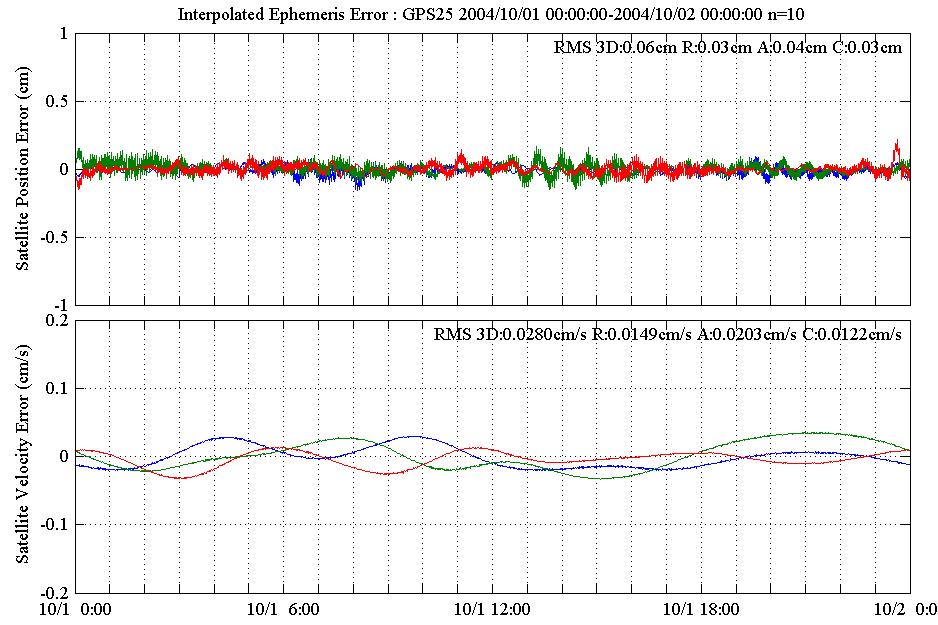
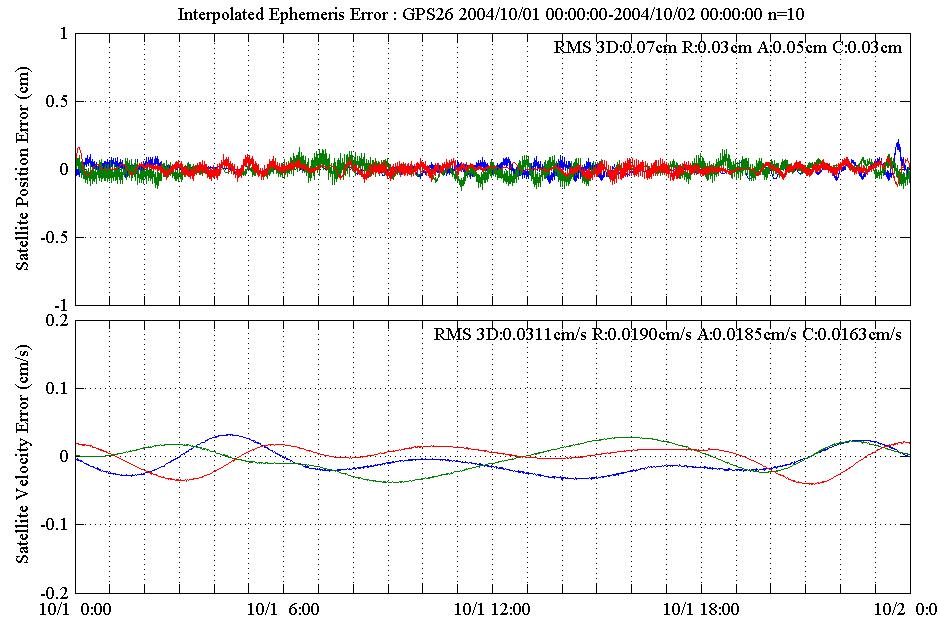
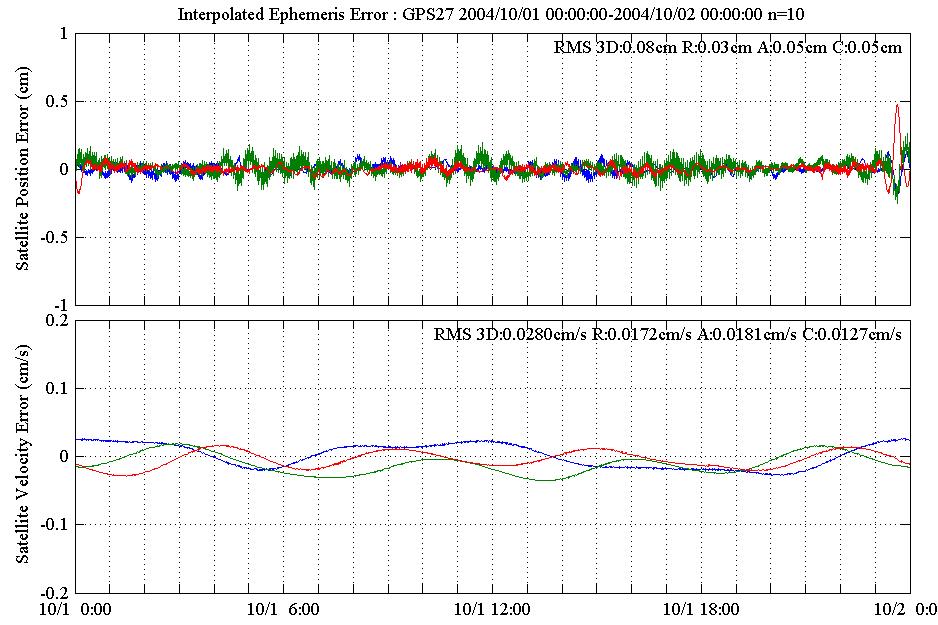
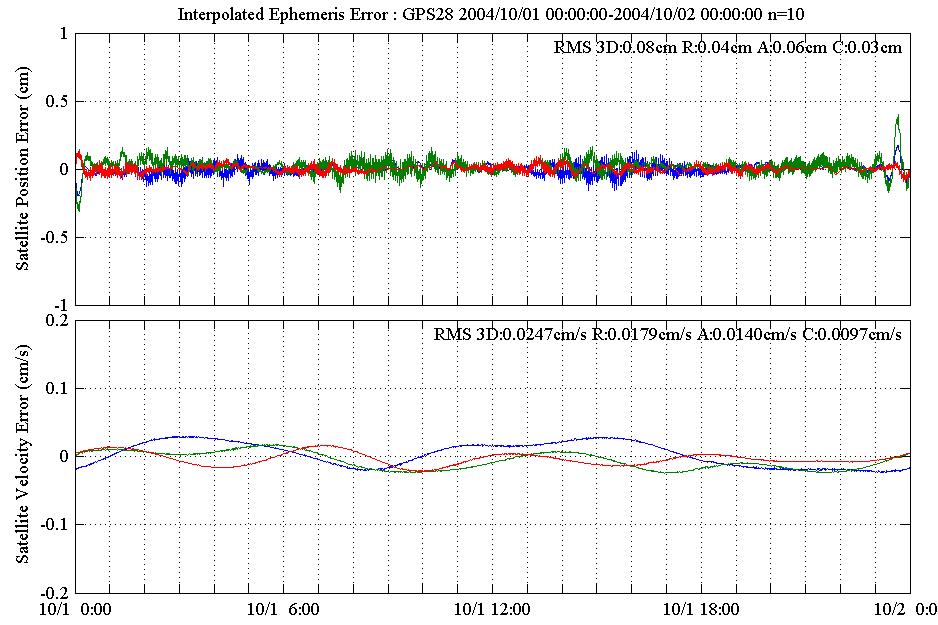
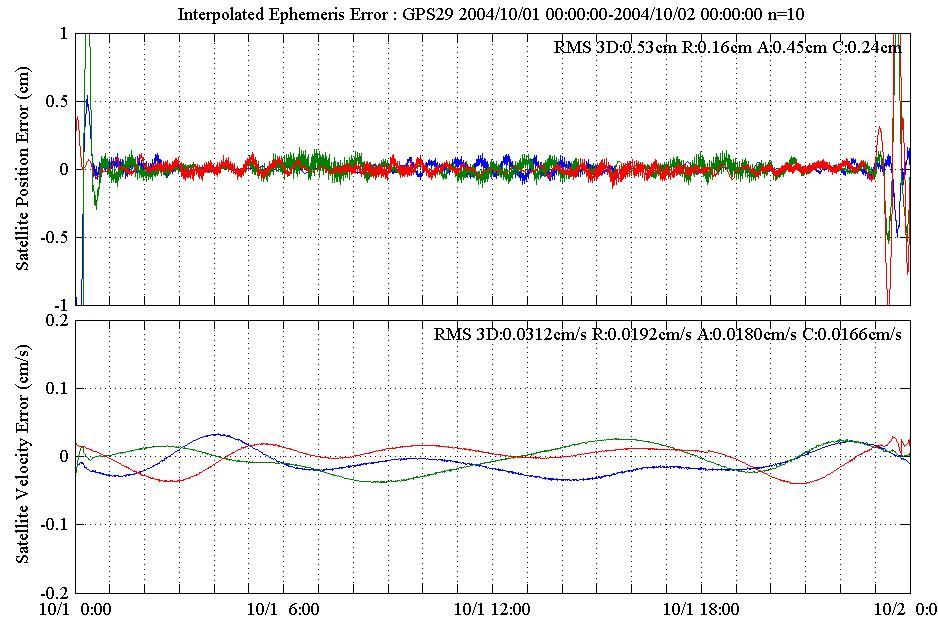
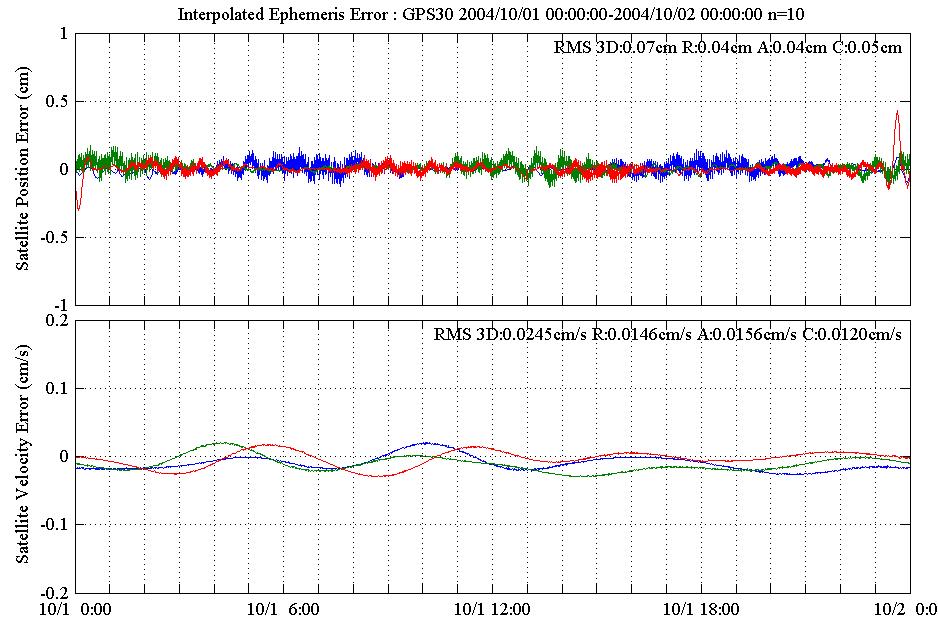
曗娫偼n師儔僌儔儞僕僃丅偨偩偟曗娫嬫娫偼曗娫揰傪拞怱偲偟偰n+1揰傪庢傞丅椺偊偽9師側傜曗娫揰傪嫴傓傛偆偵慜屻5揰偢偮庢偭偰10揰9師偱曗娫偡傞丅曗娫師悢傪曄偊偰昡壙偟偨曗娫惛搙傪埲壓偵帵偡丅偙偙偱偼惛枾塹惎塣摦儌僨儖傪巊偭偨曗娫抣偲斾妑偟偨岆嵎傪帵偡丅擔懼傝嬤偔偺惛搙埆壔傪杊偖偨傔摉擔偩偗偱側偔丄慜擔丄梻擔偺惛枾楋傕摨帪偵巊梡偟偰偄傞丅
| degree of polynomial |
Position Error (cm) | Velocity Error (cm/sec) | ||||||
|---|---|---|---|---|---|---|---|---|
| 3D | Radial | AlongTrk | CrossTrk | 3D | Radial | AlongTrk | CrossTrk | |
| n=5 | 118.12 | 72.10 | 73.84 | 57.48 | 0.415 | 0.253 | 0.260 | 0.202 |
| n=6 | 11.57 | 7.31 | 6.89 | 5.75 | 0.051 | 0.032 | 0.031 | 0.025 |
| n=7 | 1.02 | 0.63 | 0.63 | 0.50 | 0.029 | 0.017 | 0.019 | 0.014 |
| n=8 | 0.16 | 0.08 | 0.11 | 0.08 | 0.028 | 0.017 | 0.018 | 0.013 |
| n=9 | 0.13 | 0.05 | 0.11 | 0.05 | 0.028 | 0.017 | 0.018 | 0.013 |
| n=10 | 0.13 | 0.05 | 0.10 | 0.06 | 0.028 | 0.017 | 0.018 | 0.013 |
| n=11 | 0.14 | 0.05 | 0.12 | 0.06 | 0.028 | 0.017 | 0.018 | 0.013 |
| n=13 | 0.15 | 0.06 | 0.12 | 0.06 | 0.028 | 0.017 | 0.018 | 0.013 |
| n=15 | 0.15 | 0.06 | 0.13 | 0.06 | 0.028 | 0.017 | 0.018 | 0.013 |
n=10偺嵺偺塹惎枅偺曗娫岆嵎傪埲壓偵帵偡丅戝晹暘偱岆嵎偑2mm埲壓偵廂傑偭偰偄傞偑椺偊偽PRN29偺擔懼傢傝嬤偔偱1cm傪挻偊傞岆嵎偑弌偰偄傞丅偙偺帪婜偺PRN29偼IGS惛枾楋嶌惉帪偺塣摦儌僨儖晄惍崌偑戝偒偄塹惎偱偁傝惛枾楋偺抣傕彮偟夦偟偄偺偱昡壙偼擄偟偄丅
| PRN01 | PRN03 | PRN04 | PRN05 | PRN06 | PRN07 | PRN08 | PRN09 | PRN10 | PRN11 |
| PRN13 | PRN14 | PRN15 | PRN16 | PRN17 | PRN18 | PRN19 | PRN20 | PRN21 | PRN22 |
| PRN23 | PRN24 | PRN25 | PRN26 | PRN27 | PRN28 | PRN29 | PRN30 | PRN31 |
埲忋傛傝婳摴曗娫偼奣偹8師埲忋偺懡師懡崁幃曗娫傪巊偊偽傎傏廫暘側惛搙偑弌傞偙偲偑暘偐偭偨丅堦晹塹惎偱擔懼傢傝晅嬤偱1cm傪挻偊傞偙偲偑偁傞偑偙傟偼惛枾楋偺栤戣偺壜擻惈偑崅偄丅
側偍埲忋偼崅搙偺崅偄GPS塹惎偱偼懡崁幃曗娫偱廫暘惛搙偑弌傞偲偄偆偙偲偱懠偺婳摴偺塹惎偱偼忬嫷偑堎側傞丅椺偊偽LEO塹惎偱偁傞GRACE偼傗偭偰傒傞偲懡師懡崁幃曗娫偱偼廫暘側惛搙偼弌側偄傛偆偩丅偙傟偼嬻婥掞峈傗崅師抧媴廳椡崁偑塹惎塣摦偵岠偄偰偄偰丄懡崁幃揥奐偟偨応崌偺崅師崁偺婑梌傪柍帇偱偒側偄偨傔偱偁傞偲峫偊傜傟傞丅
.....................................................................................................................................
帪寁曗娫
IGS惛枾楋偺帪寁偼5暘娫娫妘抣偑岞奐偝傟偰偄傞丅帪寁埨掕搙偼捠忢Allan
Deviation偲屇傇帪娫娫妘冄偺娭悢冃y(冄)偱昞偝傟丄Ray偺榑暥偵傛傟偽冄=300s偵偍偗傞GPS塹惎帪寁偺Allan
Deviation偼埲壓偺捠傝丅Block II/IIA 3亊10-12(Cesium), 2亊10-11(Rubidium), Block IIR 2亊10-12乣5亊10-13
惛枾楋帪寁傪曗娫偡傞応崌曗娫拞揰偱傗偼傝嵟傕惛搙偑埆偔側傝偦偺曗娫岆嵎偼帪寁埨掕搙偱寛傑傞丅冄=150s偺Allan
Deviation傪忋婰榑暥僌儔僼偐傜奜憓偱媮傔傞偲丄Block II/IIA 侾亊10-1侾(Cesium), 俉亊10-11(Rubidium), Block IIR 俁亊10-12乣侾亊10-1俀丅廬偭偰拞揰偱偺曗娫岆嵎偼Block II/IIA 侾.5ns(Cesium),
12ns(Rubidium), Block IIR 0.45ns乣0.15ns偲尒愊傕傞偙偲偑偱偒傞丅
偙傟傜偺曗娫岆嵎偼惛枾楋帪寁岆嵎0.1ns埲壓偵斾妑偟廫暘戝偒偄偺偱曗娫抣傪巊偆偲惛搙楎壔偺壜擻惈偑崅偄丅
尰嵼丄JPL媦傃CODE AC夝偺帪寁偵偼30昩娫妘偺塹惎帪寁悇掕抣偑娷傑傟偰偄傞偺偱丄30昩娫妘夝愅偺応崌偙傟傪巊偆傎偆偑椙偄丅
側偍30昩娫妘帪寁偺曗娫岆嵎傪忋偲摨條偵尒愊傕傞偲丄Block
II/IIA 俁ns(Cesium), 1俆ns(Rubidium), Block
IIR 0.15ns丄偲俆暘娫妘帪寁偵斾傋夵慞偝傟側偄丅
廬偭偰30昩枹枮娫妘偺崅帪娫暘夝擻PPP偱偼惛枾帪寁傪偳偙偐傜擖庤偡傞偐偑栤戣偲側傞丅
偦偺屻塹惎帪寁悇掕抣傪婎偵尰嵼偺GPS塹惎偵娭偟偰帪寁曗娫岆嵎傪昡壙偟偨丅偦偺寢壥丄5暘娫妘帪寁曗娫岆嵎偱0.1ns乣0.6ns丄30昩娫妘帪寁曗娫岆嵎偱0.03乣0.06ns掱搙偺惛搙偑摼傜傟傞偙偲偑傢偐偭偨丅偙傟傜偺岆嵎偼惛枾楋帪寁岆嵎0.1ns埲壓偵懳偟柍帇偼弌棃側偄偑岆嵎傪峫椂偟偰巊梡偡傟偽廫暘巊梡壜擻偱偁傞偲峫偊傜傟傞丅
.....................................................................................................................................
婔壗嫍棧儌僨儖(1)
GPS偵傛傞崅惛搙應埵寁嶼傪峴偆嵺偵偼塹惎偲嬊偺埵抲偐傜塹惎-庴怣傾儞僥僫娫偺婔壗嫍棧(Geometric
Distance)傪惛枾偵媮傔傞昁梫偑偁傞丅 偙偺嫍棧傪惛枾偵媮傔傞偨傔偵偼怣崋偺揱攄抶墑傪峫椂偟偨岝楬嵎曽掱幃(Light-Time
Equation)偲屇傇曽掱幃傪夝偐側 偗傟偽側傜側偄丅
偙偺曽掱幃偱偼揱攄抶墑埲奜偵怣崋揱攄拞偺塹惎媦傃嬊偺姷惈嬻娫忋偱偺堏摦傗庴怣婡帪寁岆嵎傪峫椂偡傞昁梫偑偁傞丅
庴怣婡帪寁岆嵎偼塹惎埵抲偑捠忢GPS帪崗宯偵摨婜偟偰梌偊傜傟傞(偁傞偄偼悇掕偡傞)偺偱偦偺帪崗宯偲怣崋庴怣帪崗偑
偢傟偰偄傞岠壥傕曗惓偡傞偨傔偵昁梫偱偁傞丅
GT偑巊梡偟偰偄傞婔壗嫍棧儌僨儖傪埲壓偵帵偡丅
GPS塹惎偺応崌丄怣崋揱攄抶墑+庴怣婡帪寁岆嵎儮t偼崅乆0.1昩埲壓側偺偱偙偺娫偺塹惎塣摦偼娙堈側儌僨儖偱嬤帡偟偰傕
廫暘惛搙偑弌傞丅 GT偱偼偙偺塹惎塣摦偼塹惎丒抧媴偺擇懱栤戣偺2師嬤帡偵傛傝夝偄偰偄傞丅
塹惎懍搙偑廫暘側惛搙偱梌偊傜傟傞偲壖掕偟偰嬤帡岆嵎偼奣偹儮a*儮t2/2偱梌偊傜傟丄偙偺応崌偺儮a偼抧媴廳椡 偺J2崁偑巟攝揑偱GPS婳摴偵偍偄偰10-4m/s2偔傜偄偺抣偺偨傔丄儮t=0.侾s偲偟偰嬤帡岆嵎偼嵟戝
0.0005mm偱偁傝柍帇偱偒傞丅 static應埵偺応崌丄嬊偺堏摦偼傎偲傫偳抧媴偺帺揮偵傛傞傕偺偱偁傝丄抧媴愒摴敿宎Re=6378km丄
帺揮懍搙冎=0.729亊10-4rad/s偲偟偰偙偺帪娫撪偺愒摴忋嬊偺堏摦偼Re冎儮t偱梌偊傜傟50m偔傜偄偵側傞丅
偙偺掱搙偺帪娫撪偱偼抧媴帺揮幉偺曽岦偼廫暘偵埨掕側偺偱丄GT偱偼嵨嵎丒復摦儌僨儖偲抧媴夞揮僷儔儊乕僞傪巊偭偰
GPS帪崗宯偵摨婜偟偨帪崗偺帺揮幉傪弌偟丄偦偺帺揮幉傪拞怱偲偟偨夞揮塣摦偱嬤帡偟偰偄傞丅
側偍偙偺婔壗嫍棧儌僨儖偵偮偄偰挊柤側GPS夝愅僜僼僩偱偁傞Bernese偼塹惎塣摦偺抧媴廳椡岠壥傪柍帇偟偰偄傞丅
(Bernese5.0 Draft Document 2.3 Observation Equation嶲徠) 抧媴廳椡偵傛傞壛懍搙偼GPS婳摴偱1m/s2掱搙偱偁傝偦傟偵傛傞塹惎埵抲偺曄壔偼0.1s偱嵟戝5mm掱搙偵側傞偺偱
丄偙傟傪柍帇偡傞偙偲偵傛傝應埵惛搙楎壔偵寢傃偮偔壜擻惈偑偁傞丅
Bernese偼幚愌偺偁傞偡偽傜偟偄惛枾夝愅僜僼僩偩偑巊偭偰偄傞儌僨儖偑庒姳屆偄偒傜偄偑偁傞丅(偙偺崁懕偔)
.....................................................................................................................................
婔壗嫍棧儌僨儖(2)
岝楬嵎曽掱幃偱偼幃偺椉曈偵婔壗嫍棧崁兿偑弌偰偔傞偺偱偦偺傑傑偱偼夝偗側偄丅廬偭偰悢抣寁嶼偺掕朄偵廬偄iteration偵傛傝兿傪媮傔傞丅偙偺曽掱幃偼旕忢偵廂懇偑懍偔兿=0傪弶婜抣偵偟偰傕捠忢3,4夞偱廫暘側惛搙偱兿傪媮傔傞偙偲偑弌棃傞丅
塹惎婳摴媦傃嬊埵抲傪僷儔儊乕僞悇掕偡傞嵺偵昁梫偲側傞偺偱摨帪偵婔壗嫍棧偺塹惎埵抲丒懍搙偵傛傞曃旝暘學悢傪媮傔傞丅儮t=0偺応崌丄婔壗嫍棧偺塹惎埵抲偵傛傞曃旝暘學悢偼嬊偐傜塹惎傪尒偨帇慄曽岦扨埵儀僋僩儖丄塹惎懍搙偵傛傞曃旝暘學悢偼0儀僋僩儖偲側傞丅偦傟偵塹惎埵抲丒懍搙偺t-儮t偐傜t傊偺忬懺慗堏峴楍傪妡偗傞偙偲偵傛傝儮t暘偺塹惎埵抲丒懍搙偺曄壔暘傪曗惓偡傞丅GT偱偼偙偺忬懺慗堏峴楍傕抧媴廳椡傪峫椂偟偨塹惎塣摦曽掱幃偺2師嬤帡偵傛傝媮傔偰偄傞丅
.....................................................................................................................................
嵗昗曄姺曗惓
IGS Orbit/Clock傪巊偭偨PPP偱偼壗傕曗惓傪偟側偄偲悅捈15乣20mm偺宯摑岆嵎偑弌傞丅GT偱偼偦偺偨傔IGS
ITRF嬊偺PPP寢壥偲ITRF嵗昗傪巊偭偰嵟彫擇忔朄偱Helmert曄姺學悢傪媮傔嵗昗曄姺曗惓傪峴偄嵟廔悇掕嵗昗偲偟偰偄傞丅(Helmert曄姺學悢偺悇掕)
IGS ITRF嬊PPP寢壥 (曗惓側偟)丄IGS ITRF嬊PPP寢壥(曗惓桳傝)
Helmert曄姺偵傛傞曗惓學悢偺偆偪悅捈嵗昗偺曗惓偵岠偔偺偼傎偲傫偳Scale僷儔儊乕僞偱戝偒偝偼戝懱2乣3ppb偔傜偄偺抣偱偁傞丅IGS偱偼惛枾楋偺昳幙娔帇偺偨傔偺宲懕揑偵PPP偵傛傝ITRF嬊嵗昗傪寛掕偟偦偺寢壥傪岞奐偟偰偄傞丅偦偺寢壥傪尒偰傕傎傏摨條偺曗惓學悢抣偑摼傜傟偰偄傞丅曗惓學悢偺偆偪dx,dy,dz偼Geocenter僆僼僙僢僩丄Rx,Ry,Rz偼抧媴夞揮僷儔儊乕僞岆嵎偵婲場偡傞傕偺偲棟夝偱偒傞偑Scale僷儔儊乕僞偵偮偄偰偼昁偢偟傕尨場偑柧椖偱側偄丅ITRF宯偼GPS偩偗偱側偔VLBI,SLR摍偺懠偺應抧庤抜傕巊偭偰寛掕偝傟偰偄傞偐傜丄偙偺曗惓崁偼GPS寁應撈帺偺摿惈偵婲場偡傞傕偺偱偁傞壜擻惈偑崅偄丅偙偺尨場偲偟偰傂偲偮峫偊傜傟偰偄傞偺偼夝愅偵巊梡偟偰偄傞塹惎媦傃庴怣傾儞僥僫埵憡拞怱僆僼僙僢僩偺栤戣偱偁傞丅尰嵼IGS夝愅僙儞僞乕偱昗弨偲偟偰巊傢傟偰偄傞庴怣傾儞僥僫埵憡拞怱僆僼僙僢僩/曄摦僷儔儊乕僞偼IGS_01.PCV偩偑偙偺僷儔儊乕僞偼摿掕偺傾儞僥僫偵懳偡傞憡懳抣偲偟偰寁應偝傟寛掕偝傟偨傕偺偱偁傞丅傑偨塹惎傾儞僥僫埵憡拞怱僆僼僙僢僩偵偮偄偰偼塹惎Block枅偵屌掕偺抣傪巊梡偟偰偍傝昁偢偟傕尰幚偺抣偲崌抳偟偰偄側偄壜擻惈偑偁傞丅IGS偱偼偙偺栤戣偵懳墳偡傞偨傔"absolute"傾儞僥僫埵憡拞怱僷儔儊乕僞偺摫擖傪寁夋偟偰偄傞條偱偁傝丄彨棃揑偵偼偦偺摫擖偵傛傝Scale僷儔儊乕僞偵傛傞曗惓偼昁梫側偔側傞偐傕偟傟側偄丅
.....................................................................................................................................
帪寁悇掕
PPP偵偍偄偰偼塹惎婳摴媦傃帪寁傪惛枾楋摍偵屌掕偟嬊埵抲摍傪悇掕偡傞偑丄偙偺嵺巊梡偡傞帪寁偑偳偆嶼弌偝傟偰偄傞偐偑廳梫偱偁傞丅椙偔抦傜傟偰偄傞傛偆偵2廃攇(L1,L2)偺媅帡嫍棧娫偵偼庡偵塹惎媦傃庴怣婡偺夞楬抶墑嵎偵敽偆DCB(Differential
Code Bias)偁傞偄偼IFB(Inter-Frequency Bias)偲屇傇僶僀傾僗偑懚嵼偡傞丅傑偨怴偟偄宆偺僐乕僪儗僗庴怣婡偵偍偄偰偼L1斃憲攇偵偮偄偰C/A僐乕僪(C1),P(Y)僐乕僪(P1)偺2庬椶偺媅帡嫍棧偑寁應偱偒偦偺娫偵偼摨條偵僶僀傾僗偑懚嵼偡傞丅捠忢帪寁偼媅帡嫍棧傪巊偭偰應傞偺偱偙傟傜偺僶僀傾僗傪偳偆埖偆偐偱帪寁悇掕抣偑曄傢傞丅
寢榑偐傜彂偔偲尰嵼偺IGS Clock偼P1媦傃P2媅帡嫍棧偺揹棧憌僼儕乕慄宍寢崌傪巊偭偰寛掕偝傟偰偄傞丅P1偺寁應偑弌棃側偄庴怣婡偵偮偄偰偼P1偺戙傢傝偵C1傪屻偱愢柧偡傞P1-C1僶僀傾僗偱曗惓偟偨抣偑巊梡偝傟傞丅側偍偙偺庤弴偼GPS
Week 1056 (200/04/02)偐傜奐巒偝傟偰偍傝偦傟埲慜偺帪寁悇掕抣偼堎側偭偨媅帡嫍棧傪巊偭偰寛掕偝傟偰偄傞偺偱拲堄偑昁梫偱偁傞丅
埲忋傛傝P1媅帡嫍棧傪寁應偱偒傞2廃攇庴怣婡偲IGS
Clock傪巊偭偰PPP夝愅傪峴偆応崌丄媅帡嫍棧僶僀傾僗傪峫椂偡傞昁梫偼柍偄丅媅帡嫍棧僶僀傾僗傪峫椂偡傞昁梫偑偁傞偺偼1廃攇娤應偺応崌媦傃P1傪寁應偱偒側偄庴怣婡傪巊梡偡傞応崌偺傒偱偁傞丅
偝偰丄忋偱帪寁偼媅帡嫍棧傪巊偭偰應傞偲彂偄偨偑偙傟偼尩枾偵偼惓偟偔側偄丅崅惛搙偺帪寁悇掕偵偼媅帡嫍棧偲斃憲攇埵憡偺椉幰偑巊傢傟傞丅偡側傢偪帪寁偺帪娫曄摦偵偮偄偰偼斃憲攇埵憡丄愨懳抣偵偮偄偰偼媅帡嫍棧偵傛傝應傞丅偙傟偼媅帡嫍棧偵偼庡偵儅儖僠僷僗偵傛傞戝偒側嶨壒惉暘偑壛傢傞偙偲媦傃斃憲攇埵憡偺傒偱偼斃憲攇埵憡僶僀傾僗偲帪寁僶僀傾僗偺暘棧偑弌棃側偄偙偲偵傛傞丅偙偙偱媅帡嫍棧偼悇掕婜娫拞偺暯嬒抣偲偟偰帪寁僶僀傾僗偺愨懳抣寛掕偵巊梡偝傟傞丅媅帡嫍棧偵偼庡偵儅儖僠僷僗偵傛傞僶僀傾僗惉暘偑娷傑傟傞偑IGS
Clock偺応崌偼儅儖僠僷僗傪娷傔偰媅帡嫍棧傪暯嬒偟帪寁悇掕偵巊梡偟偰偄傞條偱偁傞丅
媅帡嫍棧儅儖僠僷僗偺憡懳抣偼斃憲攇埵憡傪婎弨偵偟偰梕堈偵悇掕偱偒傞偺偱丄慡儅儖僠僷僗偺暯嬒=0偺條側堦掕偺惂栺傪壖掕偡傞偲儅儖僠僷僗偺愨懳抣傪悇掕偡傞偙偲偑弌棃傞丅GT偵偍偄偰傕偙偺庤朄偱悇掕偟偨媅帡嫍棧儅儖僠僷僗傪巊偭偰媅帡嫍棧傪曗惓偡傞偙偲傕壜擻偱偁傞偑丄媅帡嫍棧儅儖僠僷僗曗惓傪峴偭偨帪寁悇掕抣偲IGS
Clock偲偺娫偵偼柧傜偐側僶僀傾僗岆嵎偑擣傔傜傟傞丅偙傟偼IGS
Clock偑儅儖僠僷僗曗惓傪峴偭偰偍傜偢儅儖僠僷僗傪娷傔偨媅帡嫍棧暯嬒傪帪寁悇掕偵巊梡偟偰偄傞偨傔偲峫偊傜傟傞丅
尩枾偵尵偊偽娤應嬊偵傛傝儅儖僠僷僗偺戝偒偝傗弌曽偼堎側傞偺偱儅儖僠僷僗傪娷傔偨媅帡嫍棧暯嬒傪巊偭偰寛掕偝傟傞帪寁悇掕抣偼巊梡偟偨娤應嬊僙僢僩偵傛偭偰嵎偑弌傞偼偢偱偁傞丅偟偐偟尰嵼傑偱偺夝愅偱偼梲偵偦偺條側嵎偼尒傜傟偰偄側偄丅
偝傜偵暋嶨側偙偲偵GPS偱偼尨棟忋塹惎帪寁偲庴怣婡帪寁偺嵎偟偐寁應偱偒側偄偺偱摿掕帪寁傪婎弨偲偟偨憡懳帪寁偟偐寛掕偡傞偙偲偑弌棃側偄丅廬偭偰捠忢偼摿掕偺婎弨帪寁嬊偺帪寁傪0偵屌掕偟偰憡懳帪寁傪悇掕偡傞丅婎弨帪寁嬊偺慖傃曽偼擟堄偱偁傞偑側傞傋偔崅埨掕帪寁傪帩偭偨嬊傪慖掕偡傞偺偑晛捠偱丄IGS偺夝愅偱傕悈慺儊僓乕尨巕帪寁傪憰旛偟偨嬊傪婎弨帪寁嬊偲偡傞偙偲偑懡偄丅側偍偙偺曽朄偼帪寁婎弨嬊帪寁偑屘忈偟偨傝娤應僨乕僞偑寚棊偟偨傝偟偨応崌丄慡懱偺帪寁悇掕偑攋抅偟偨傝岆嵎偑憹戝偡傞偺偱丄婎弨帪寁嬊偺忬懺傪娔帇偟堎忢偺応崌暿偺婎弨帪寁嬊偵愗傝懼偊偨傝丄嵟弶偐傜暋悢偺婎弨帪寁偺廳傒晅偒暯嬒傪婎弨偲偟偰帪寁傪悇掕偡傞応崌傕偁傞丅
偙偺傛偆偵GPS塹惎媦傃庴怣婡僱僢僩儚乕僋撪偱寛掕偝傟偨憡懳帪寁偼嵟廔揑偵UTC傗GPS帪崗傊偺懳墳偯偗偑側偝傟傞丅IGS
Clock偺応崌偼奺夝愅僙儞僞偱悇掕偝傟偨憡懳帪寁傪挷惍暪崌偡傞偺偲摨帪偵暋嶨側庤弴偱嵟廔揑偵GPS帪崗宯偵崌傢偣傞丅偙偺庤弴偺徻嵶偵偮偄偰偼J.Ray,K.Senior,
IGS/BIPM pilot project: GPS carrier phase
for time/frequency transfer and timescale
formation, Metrologia 40 (2003) S270-S288偵徻偟偄丅尩枾偵尵偊偽GPS帪崗偼曻憲楋埲忋偺惛搙傪帩偨側偄偺偱IGS
Clock偺帪崗宯偼IGRT(Rapid Clock)傑偨偼IGST(Final
Clock)偲屇偽傟傞丅帪寁偑悇掕婜娫拞偺媅帡嫍棧暯嬒抣傪婎偵寛掕偝傟傞偙偲媦傃GPS帪崗偲偺懳墳晅偗偑夝愅婜娫枅偵峴傢傟傞偙偲傛傝IGS
Clock偵偼24H枅00:00GPST偵偍偄偰帪崗偺晄楢懕偑尒傜傟傞丅応崌偵傛偭偰偼帪崗晄楢懕偑栤戣偵側傞偙偲帪崗宯傪捈愙UTC偵懳墳晅偗傞曽偑壗偐偲搒崌偑椙偄偙偲偐傜IGS偱傕帪崗寛掕僾儘僙僗偺夵慞専摙偑偝傟偰偍傝丄彨棃揑偵偼偙傟傜偺僾儘僙僗偑曄峏偵側傞壜擻惈偑崅偄丅
偝偰丄偙偺愨懳帪崗偲偺懳墳晅偗偼應埵偺柺偱偼昁偢偟傕昁梫偲偼側傜側偄丅PPP偺応崌偱傕塹惎帪寁偺憡懳嵎偑惛枾偵寛掕偝傟偰偄傟偽傛偔丄庴怣婡帪寁悇掕抣傪巊傢側偄応崌偁傞偄偼巊偆応崌偱傕庴怣嬊娫偺憡懳嵎偟偐昁梫偱側偄応崌丄昁偢偟傕愨懳帪崗偼昁梫偲偝傟側偄丅廬偭偰捠忢憡懳帪崗偲偟偰寛掕偝傟偰偄傞夝愅僙儞僞夝傕PPP偱巊梡偡傞偙偲偑弌棃傞丅側偍偙偺嵺丄庴怣婡帪寁偼巊梡偟偨塹惎帪寁偺帪崗宯偵廬偭偰悇掕偝傟傞偙偲偵側傞丅
GPS娤應僨乕僞傪巊偭偨帪寁寛掕庤弴偵偮偄偰偼懡暘夝愅僜僼僩僂僃傾偵傛偭偰堎側傞偑徻嵶偑岞奐偝傟偰偄傞傕偺偼傎偲傫偳側偄丅埲壓偵GT偱巊梡偟偰偄傞帪寁悇掕庤弴傪傑偲傔傞丅側偍偙偺庤弴偼GT偺奐敪偵摉偨偭偰帋峴嶖岆偟側偑傜摫弌偟偨傕偺偱嵟廔揑偵悇掕抣偼IGS
Clock偵0.15ns偺惛搙偱堦抳偟偰偄傞丅
丒C1媅帡嫍棧娤應抣偵P1-C1僶僀傾僗曗惓傪峴偄P1憡摉媅帡嫍棧傪惗惉偡傞丅
丒斃憲攇埵憡娤應抣偺cycle-slip専弌傪峴偆丅cycle-slip傪専弌偟偨応崌慜屻傪暿傾乕僋偲偟偰幆暿偡傞丅
丒P1-P2揹棧憌僼儕乕媅帡嫍棧傪L1-L2揹棧憌僼儕乕斃憲攇埵憡傪巊偭偰僗儉乕僕儞僌偡傞丅
丒僗儉乕僕儞僌偟偨P1-P2揹棧憌僼儕乕媅帡嫍棧傪巊偭偰僷儔儊乕僞悇掕傪峴偆丅
丒塹惎帪寁偼1st order Gauss-Marcov丄庴怣婡帪寁偼random-walk夁掱偱儌僨儖壔偟悇掕偡傞丅塹惎帪寁弶婜抣偼曻憲楋丄庴怣婡帪寁弶婜抣偼僐乕僪偲曻憲楋傪巊偭偨扨撈應埵偱媮傔傞丅
丒摨帪偵傾乕僋枅斃憲攇埵憡僶僀傾僗巆嵎傪屌掕抣偲偟偰悇掕偡傞丅偙偙偱弶婜抣偼0丄弶婜昗弨曃嵎偼1m偲偟偰偄傞丅
丒悇掕廔椆屻丄塹惎枅丄娤應嬊枅偵斃憲攇埵憡僶僀傾僗巆嵎悇掕暯嬒抣傪帪寁悇掕抣偐傜僶僀傾僗偲偟偰嵎偟堷偔丅
僗儉乕僕儞僌媅帡嫍棧偼憡懳抣偲偟偰偼斃憲攇埵憡偺惛搙傪堐帩偟偰偄傞偑傾乕僋撪偺儅儖僠僷僗暯嬒抣偑僶僀傾僗偲偟偰忔偭偰偄傞偨傔偦傟傪屌掕斃憲攇埵憡巆嵎偲偟偰悇掕偟棊偲偟偰偄傞丅悇掕帪寁偦偺傑傑偱偼帪寁偵僶僀傾僗偑巆傞偨傔丄嵟屻偵斃憲攇埵憡偲媅帡嫍棧偺嵎暘傪僶僀傾僗巆嵎悇掕抣偺暯嬒傪巊偭偰曗惓偟偰偄傞丅
.....................................................................................................................................
媅帡嫍棧僶僀傾僗
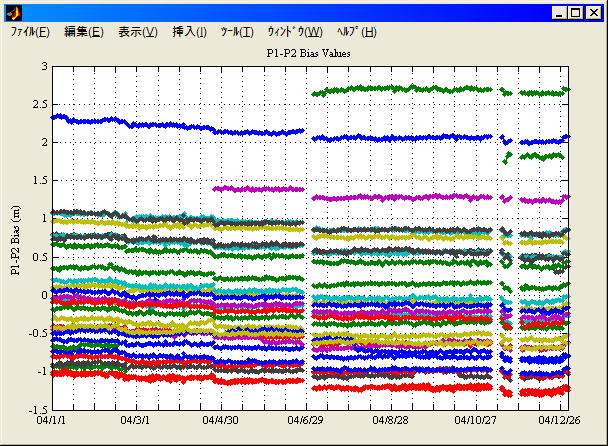
P1-P2僶僀傾僗
P1-P2僶僀傾僗IGS悇掕抣1擭暘丅IGS TEC Final偐傜敳偒弌偟偰偄傞丅塹惎DCB偺榓偑0偵側傞傛偆偵惓婯壔偟偰偄傞偺偱塹惎偑愗傝懼傢偭偨僞僀儈儞僌偱晄楢懕偑尒傜傟傞丅敳偗偰偄傞偲偙傠偼壗屘偐IGS
TEC Final偑側偄偲偙傠丅挿婜埨掕搙傕偐側傝椙偄偑杮摉偩傠偆偐丅
IGS P1-P2僶僀傾僗抣(塹惎) (2004/1/1-2004/12/31) (昞帵僾儘僌儔儉)
P1-C1僶僀傾僗
僐乕僪儗僗庴怣婡偵偼偄偔偮偐偺曽幃偑偁傝丄曽幃偵傛傝媅帡嫍棧應掕抣偵嵎偑尒傜傟傞丅IGS僱僢僩儚乕僋偑Rogue/TurboRogue(TR)傪拞怱偵偟偨庴怣婡偐傜怴悽戙偺僐乕僪儗僗庴怣婡偵堏峴偵偁偨傝丄媅帡嫍棧娤應抣偵TR偲偺僶僀傾僗偑尒傜傟傞傛偆偵側偭偨丅
徻嵶偼埲壓偺IGS Mail傪嶲徠偺偙偲丅
J.Kouba et al., Handling mixed receiver types, IGS Mail-2320, 24 Jun 1999
J.Ray, new pseudorange bias convention, IGS Mail-2744, 15 Mar 2000
P1-P2偱IGS Clock偑嶼弌偝傟傞傛偆偵側偭偨偺偼GPS
Week 1056 (2000/04/02)偐傜偱丄偦傟傑偱偺IGS
Clock偼C1-P2偱嶼弌偝偰偄偨丅廬偭偰GPS Week
1055埲慜偺IGS Clock傪巊梡偡傞偵偼拲堄偑昁梫偱偁傞丅P1-C1僶僀傾僗偺抣偵偮偄偰偼壗搙偐峏怴偝傟偰偍傝IGS
Clock傪巊偆嵺偵偼IGS夝愅偱巊傢傟偨P1-C1僶僀傾僗傪巊偭偰曗惓偡傞昁梫偑偁傞丅IGS偱偺夝愅偱巊梡偝傟偰偄傞P1-C1僶僀傾僗偺棜楌偲偦偺抣傪埲壓偵帵偡丅
| 揔梡奐巒廡 | cc2noncc.f僶乕僕儑儞 | 嶲徠IGS Mail | 旛峫 |
|---|---|---|---|
| GPS Week 1056 (2000/04/02) | ver.1.3 | IGS Mail-2744 | |
| GPS Week 1067 (2000/06/18) | ver.1.4 | IGS Mail-2879 | |
| GPS Week 1097 (2001/01/14) | ver.2.0 | IGS Mail-3160 | |
| GPS Week 1106 (2001/03/18) | ver.2.1 | IGS Mail-3220 | |
| GPS Week 1150 (2002/01/20) | ver.2.4 | IGS Mail-3674 | |
| ver.3.0 | IGS Mail-3737 | ||
| ver.3.2 | IGS Mail-4214 | ||
| GPS Week 1208 (2003/03/02) | ver.4.0 | IGS Mail-4279 | |
| GPS Week 1219 (2003/05/18) | ver.4.3 | IGS Mail-4366 | |
| GPS Week 1257 (2004/02/04) | ver.4.5 | IGS Mail-4825 | |
| GPS Week 1271 (2004/05/10) | ver.4.6 | IGS Mail-4937 | |
| GPS Week 1284 (2004/08/15) | ver.4.7 | IGS Mail-4987 | |
| GPS Week 1306 (2005/01/16) | ver.4.8 | IGS Mail-5078 |
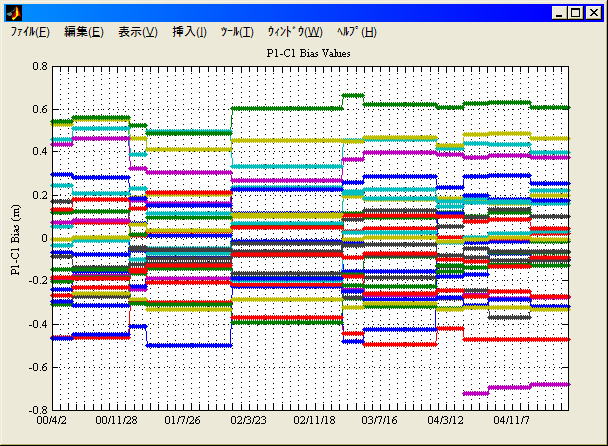
IGS P1-C1僶僀傾僗抣 (2000/4/2-2005/6/1) (昞帵僾儘僌儔儉)
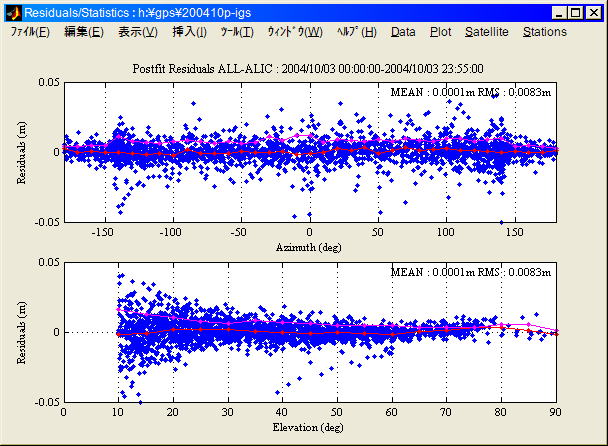
悇掕巆嵎-曽埵嬄妏埶懚惈(椺) (2004/10/3 24H
PPP, 娤應嬊:ALIC) (愒: 暯嬒丄僺儞僋: 昗弨曃嵎)
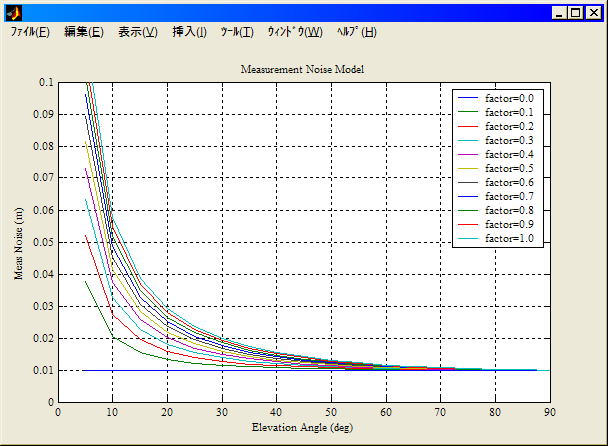
娤應僲僀僘儌僨儖 (昞帵僾儘僌儔儉)
| 夝愅ID | factor | 婳摴悇掕岆嵎 | 旛峫 |
|---|---|---|---|
| 200410c-test6 | 1.0 | 5.52cm | |
| 200410c-test7 | 0.6 | 5.52cm | |
| 200410c-test8 | 0.3 | 5.53cm | |
| 200410c-test9 | 0.1 | 5.58cm | |
| 200410c-test10 | 1.5 | 5.61cm |
.....................................................................................................................................
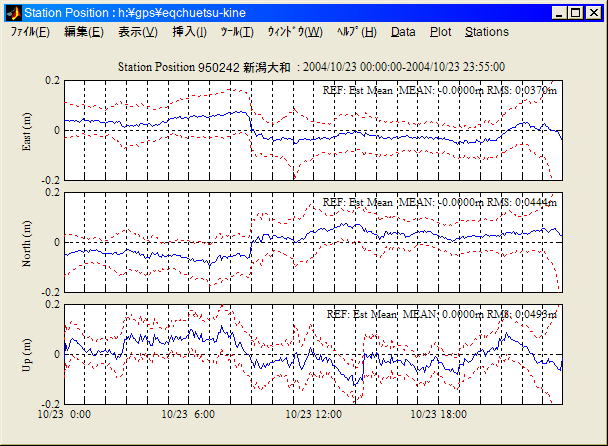
應埵儌乕僪偵傛傞帪娫姶搙偺嵎
丒2004/10/23 00:00乣23:55, 揹巕婎弨揰950242 怴妰戝榓
丒GT0.5.5alpha 5暘娫妘24H丄IGS Final Orbi/Clock巊梡丄clock
jump儕儁傾桳丄backward僼傿儖僞桳
丒怴妰導拞墇抧恔敪惗帪崗丗 2004/10/23 8:57UTC
Kinematic PPP儌乕僪
Static PPP儌乕僪 (嬊埵抲僾儘僙僗僲僀僘=1mm/sqrt(sec))
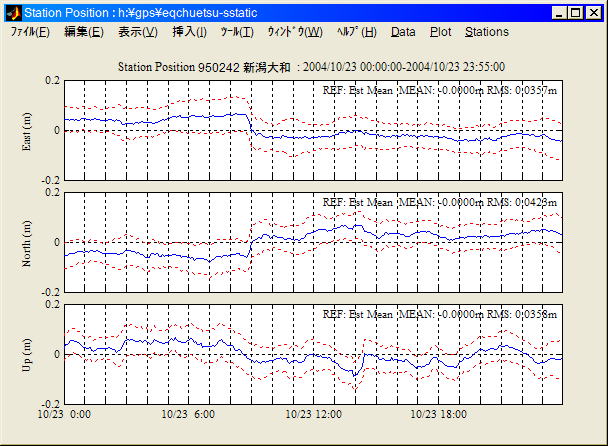
Static PPP儌乕僪 (嬊埵抲僾儘僙僗僲僀僘=0.3mm/sqrt(sec))
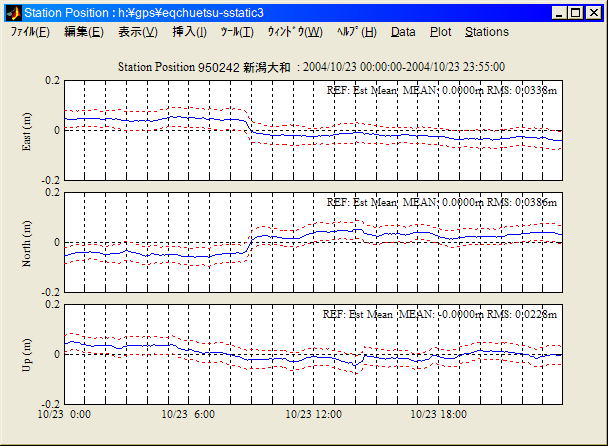
Static PPP儌乕僪 (嬊埵抲僾儘僙僗僲僀僘=0.1mm/sqrt(sec))
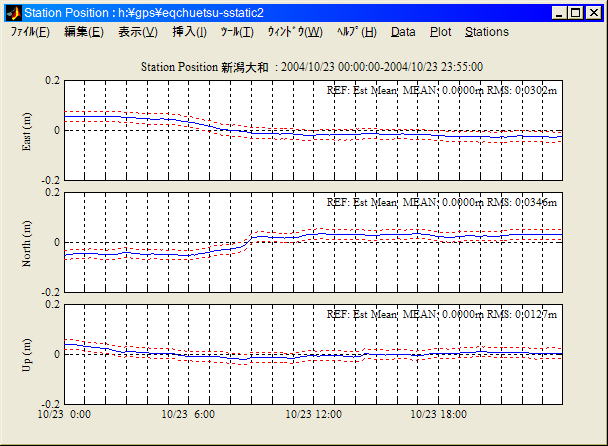
Static PPP儌乕僪 (嬊埵抲僾儘僙僗僲僀僘=0mm/sqrt(sec))
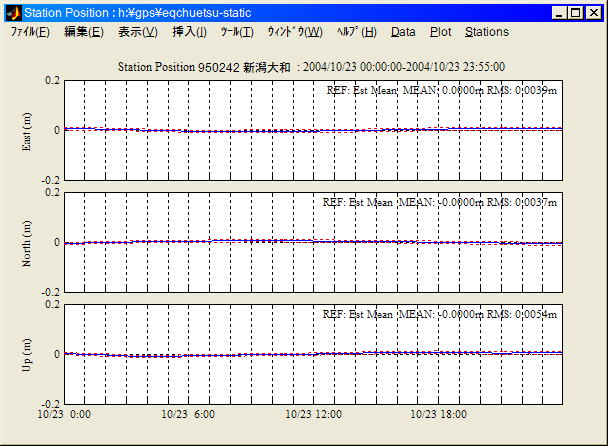
(杮夝愅偵偼崙搚抧棟堾揹巕婎弨揰僨乕僞傪巊梡偟傑偟偨)
.....................................................................................................................................
Static PPP偵偍偗傞嬊埵抲僾儘僙僗僲僀僘僷儔儊乕僞
嬊埵抲偼random-walk夁掱偱儌僨儖壔偟偰偄傞偺偱侾H偱10cm(1冃)偺曄摦偑偁傞応崌偺嬊埵抲僾儘僙僗僲僀僘偼丄
sqrt(0.1m^2/3600s)=0.0017m/sqrt(sec)
媡偵1mm/sqrt(sec)偺僾儘僙僗僲僀僘偺応崌丄1H屻偺埵抲偺晄妋掕惈(1冃)偼
sqrt(0.001m/sqrt(sec)^2*3600s)=0.06m
忋婰拞墇抧恔偵傛傞怴妰戝榓偺埵抲曄摦偵偮偄偰static
PPP, 僾儘僙僗僲僀僘=1mm/sqrt(sec)偺応崌丄悈暯10cm掱搙偺曄摦偑偁傝廂懇偵1乣1.5H偐偐偭偰偄傞偐傜戝懱堦抳偡傞丅
kinematic PPP偺応崌傕偭偲曄摦偑僔儍乕僾偵弌傞偼偢偩偑幚嵺偵偼偐側傝側傑偭偰偄傞丅偙傟偼懳棳寳抶墑傪悇掕偟偰偄傞塭嬁偐傕偟傟側偄丅
.....................................................................................................................................
Clock Steering偵敽偆媅帡嫍棧娤應抣偺旘傃
悈徎敪怳婍傪僋儘僢僋婎弨偲偟偰巊梡偟偨GPS庴怣婡偵偼庴怣婡僋儘僢僋偺僪儕僼僩偑戝偒偄傕偺偑偁傞丅GPS娤應僨乕僞偺僒儞僾儕儞僌僞僀儈儞僌偼庴怣婡僋儘僢僋偵婎偯偄偰寛傔傜傟傞偑丄偙傟傜偺庴怣婡偱偼壗傕懳嶔偟側偄偲偙偺僞僀儈儞僌偑GPS帪崗偐傜偳傫偳傫偢傟偰偄偭偰偟傑偆偲偄偆栤戣偑桳傞丅偙傟傜偺庴怣婡偺拞偵偼丄偙偺栤戣偵懳墳偡傞偨傔堦掕埲忋僋儘僢僋岆嵎偑戝偒偔側偭偨応崌偵帺摦揑偵庴怣婡僋儘僢僋傪憖嶌偟GPS帪崗偵崌傢偣偙傓偲偄偆摦嶌傪偡傞傕偺偑偁傞丅偙偺摦嶌偼Clock
Steering偲屇偽傟傞丅
偙傟傜偺摦嶌偺徻嵶偼懡暘偵庴怣婡偵埶懚偡傞偑丄堦斒揑偵偼庴怣婡僋儘僢僋偲GPS帪崗偲偺嵎偑0.5ms傪挻偊偨僞僀儈儞僌偱惓妋偵1ms庴怣婡僋儘僢僋傪偢傜偡摦嶌傪偡傞傕偺偑懡偄丅尰嵼妋擣偟偨拞偱偙傟傜偺摦嶌傪峴偆庴怣婡偼埲壓偺捠傝丗AZTECH UZ-12, TRIMBLE4000SSI, TRIMBLE4700, TRIMBLE5700丅側偍丄庴怣婡偵傛偭偰偼偙偺婡擻傪OFF偵愝掕偱偒丄尨巕帪寁摍偺奜晹僋儘僢僋傪愙懕偡傞応崌偼捠忢OFF偵愝掕偝傟傞偨傔丄偙傟傜偺庴怣婡偱傕Clock Steering偑敪惗偟側偄応崌傕桳傞丅
Clock Steering偼庴怣婡僋儘僢僋偺旘傃偱偁傞偐傜丄娤應僨乕僞偵塭嬁偑尰傟傞丅偙偺摦嶌偺娤應僨乕僞傊偺弌曽偼2庬椶偁傞丅
(1) Clock Steering帪偵媅帡嫍棧娤應抣偵1ms偺旘傃偑尰傟傞丅Time
Tag Offset=0偺傑傑丅(椺 NOUM, AZTECH UZ-12)
(2) Clock Steering帪偵媅帡嫍棧娤應抣偵旘傃偼尰傟側偄丅Time
Tag Offset偵1ms偺旘傃偑尰傟傞丅(椺 GLSV, TRIMBLE4000SSI)
媅帡嫍棧娤應抣傪惗惉偡傞嵺偺庴怣婡僋儘僢僋岆嵎傪Time Tag偱帵偝傟偨庴怣帪崗傪婎弨偵應傞偲峫偊傟偽(1), (2)偼摍壙偱偁傞丅
傑偨尰嵼妋擣偟偰偄傞斖埻偱偼丄Clock Steering帪偵斃憲攇埵憡娤應抣偵偼旘傃偼敪惗偟側偄丅
偝偰(2)偺応崌丄RINEX娤應僨乕僞弌椡帪偺Time Tag Offset偺弶婜抣偼懡偔偺応崌0偲側傞傛偆偩丅廬偭偰丄椺偊偽1帪娫枅偵弌椡偟偨偺RINEX娤應僨乕僞傪暪崌偟偰丄24帪娫暘偺RINEX娤應僨乕僞傪嶌偭偨応崌丄尦偺娤應僨乕僞僼傽僀儖撪偱偼Clock Steering帪偺媅帡嫍棧娤應抣偺旘傃偼敪惗偟側偄偑丄暋悢偺娤應僨乕僞僼傽僀儖偺愗傝懼偊僞僀儈儞僌丄偡側傢偪偙偺応崌1帪娫枅偵丄Time Tag Offset偑0偵儕僙僢僩偝傟傞偲摨帪偵媅帡嫍棧娤應抣偵旘傃偑尰傟傞 (椺 揹巕婎弨揰, TRIMBLE5700)丅偙傟偼丄椺偊偽24帪娫RNIEX娤應僨乕僞傪3擔娫暘寢崌偟偰夝愅偡傞條側応崌偵傕摨偠尰徾偑敪惗偡傞丅
庴怣婡僋儘僢僋偺旘傃偑斃憲攇埵憡娤應抣偵斀塮偝傟側偄偙偲傗庴怣婡僋儘僢僋岆嵎偺堦晹傪Time Tag Offset偵摝偑偡偙偲偑RINEX僼僅乕儅僢僩忋惓偟偄偺偐偳偆偐偼巇條傪撉傫偩偩偗偱偼濨枂偱偁傞偑丄尰幚偵偼嫋梕偝傟偰偄傞傛偆偩丅傑偨偙偙偱彂偄偨帠崁偑慡偰偺Steered Clock庴怣婡偵摉偰偼傑傞偐偳偆偐偼晄柧偱偁傞丅傕偟偐偡傞偲堎側傞摦嶌傪偡傞庴怣婡偑偁傞壜擻惈傕偁傞丅
偝偰丄偙傟傜偺庴怣婡偵偍偄偰媅帡嫍棧娤應抣偵旘傃偑尰傟傞偙偲媦傃斃憲攇埵憡娤應抣偵偼旘傃偼敪惗偟側偄偙偲偼娤應僨乕僞張棟忋偼婔偮偐偺栤戣傪堷偒婲偙偡丅
(1) 媅帡嫍棧娤應抣傪巊偭偰僒僀僋儖僗儕僢僾専弌偟偰偄傞応崌丄庴怣婡僋儘僢僋旘傃傪僒僀僋儖僗儕僢僾偲岆敾掕偟偰偟傑偆丅
(2) 媅帡嫍棧娤應抣偵偺傒旘傃偑尰傟斃憲攇埵憡娤應抣偵旘傃偑尰傟側偄偙偲偐傜丄椉幰傪巊偭偨慄宍寢崌偵旘傃偑尰傟傞丅偙傟傪娤應検偲偟偰悇掕傪峴偆応崌偵戝偒側岆嵎梫場偲側傞丅
偙傟傜偺栤戣偵懳墳偡傞偨傔丄堦斒偵巊傢傟偰偄傞娤應僨乕僞慜張棟僾儘僌儔儉偼ClockPrep偱偁傞 (嶲峫:IGSMAIL-4318)丅偙偺僾儘僌儔儉偺摦嶌偺徻嵶偼傛偔暘偐傜側偄偑Help摍傪撉傓尷傝丄媅帡嫍棧娤應抣偺旘傃傪専弌偟偰旘傃傪捈偡偲摨帪偵丄偦傟偲柕弬偟側偄傛偆偵Time Tag傪廋惓偟偰偄傞偩偗偺條偱偁傞丅偙偺張棟偵傛傝丄媅帡嫍棧娤應抣偵旘傃偑徚偊丄斃憲攇埵憡娤應抣偲偺柕弬傕夝徚偝傟傞丅婜娫偺挿偄娤應僨乕僞偱偼Time Tag Offset偑偳傫偳傫椵愊偝傟偰戝偒偔側偭偰偄偔偑丄斃憲攇埵憡娤應抣傪巊偭偨惛枾夝愅偱偼娤應僨乕僞偺庴怣帪崗偺寛掕偵偼媅帡嫍棧娤應抣偵傛傞扨撈應埵偑巊傢傟丄Time Tag偼庴怣帪崗偺奣嶼寛掕偵偟偐巊傢傟側偄偺偱捠忢栤戣偲側傜側偄丅
GT偵偍偄偰傕婔偮偐偺曽幃傪昡壙偟偨偑丄嵟廔揑偵偼ClockPrep偲帡偨傛偆側埲壓偺曽朄偱曗惓偟偰偄傞丅
(1) 娤應僄億僢僋枅偵媅帡嫍棧偵傛傞扨撈應埵偱庴怣婡僋儘僢僋岆嵎傪媮傔傞丅偙偙偱媮傔傜傟傞抣偼GPS帪崗偵懳偡傞岆嵎偱偁傞丅
(2) 庴怣婡僋儘僢僋岆嵎偺僄億僢僋娫嵎偺愨懳抣偑0.5ms埲忋傪僋儘僢僋旘傃偲敾掕偡傞丅僋儘僢僋旘傃暆偼僋儘僢僋岆嵎僄億僢僋娫嵎傪1ms偺攞悢偵娵傔偰媮傔傞丅
(3) 僋儘僢僋旘傃埲崀偺僄億僢僋偺帪崗僞僌偐傜僋儘僢僋旘傃暆暘傪尭嶼偡傞丅
(4) 僋儘僢僋旘傃埲崀偺僄億僢僋偺媅帡嫍棧娤應抣偐傜僋儘僢僋旘傃暆暘傪尭嶼偡傞丅
(5) 僋儘僢僋旘傃埲崀偺庴怣婡僋儘僢僋岆嵎悇掕抣偐傜僋儘僢僋旘傃暘傪尭嶼偡傞丅
GT偵傛傞庴怣婡僋儘僢僋旘傃曗惓偺椺傪埲壓偵帵偡丅
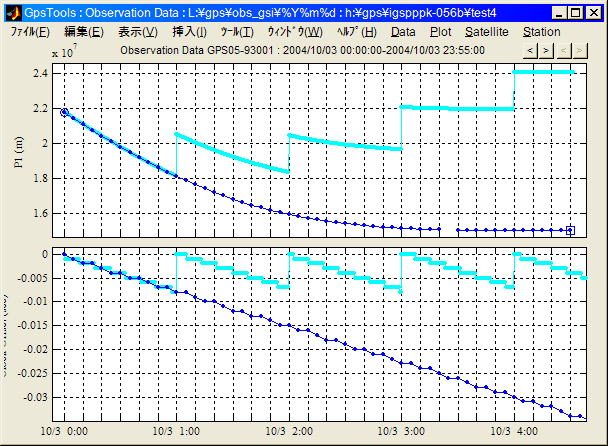
庴怣婡僋儘僢僋旘傃曗惓椺 (揹巕婎弨揰:93001嵅栰,
庴怣婡:TRIMBLE5700, 2004/10/3 0:00-4:40)
忋抜:P1媅帡嫍棧娤應抣, 壓抜:Time Tag Offset,
悈怓:曗惓慜娤應僨乕僞, 惵:曗惓屻娤應僨乕僞
栺8乣9暘娫妘偱Clock Steering偑敪惗偟曗惓慜僨乕僞偱偼1帪娫枅偵Time
Tag Offset偑0偵儕僙僢僩偝傟偰媅帡嫍棧娤應抣偑旘傫偱偄傞丅
.....................................................................................................................................
僒僀僋儖僗儕僢僾曇廤 (1)
Kinematic PPP偵偍偄偰偼斃憲攇埵憡娤應抣偺僒僀僋儖僗儕僢僾専弌偑戝曄廳梫偱偁傞丅偙傟偼Static
PPP偺応崌懠偺僄億僢僋偺娤應傪巊偭偰應埵夝偵嫮偄峉懇偑偐偗傜傟傞偺偵斾妑偟丄Kinematic偱偼應埵夝偑懠僄億僢僋偺應埵夝偲撈棫偲側傞偨傔峉懇傪嫮偔偐偗傜傟側偄偨傔偱偁傞丅Kinematic
PPP偺応崌丄僒僀僋儖僗儕僢僾専弌楻傟偼僷儖僗忋偺戝偒側應埵岆嵎偲側偭偰尰傟傞丅僒僀僋儖僗儕僢僾専弌楻傟偵傛傞應埵岆嵎偺椺傪埲壓偵帵偡丅
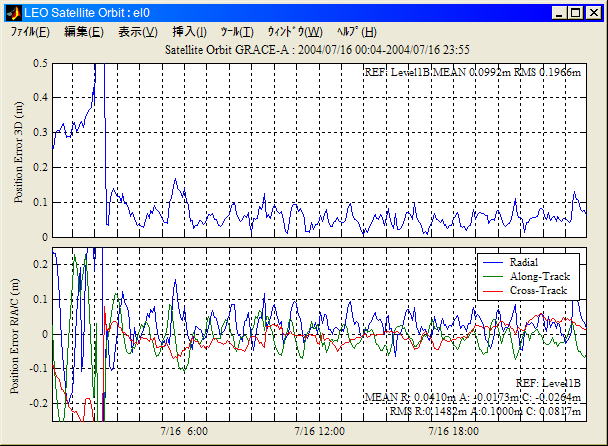
僒僀僋儖僗儕僢僾専弌楻傟偵傛傞應埵岆嵎偺椺
GRACE-A Kinematic PPP寢壥 2004/7/16 0:00乣2:30偵偐偗偰戝偒側應埵岆嵎偑尒傜傟傞
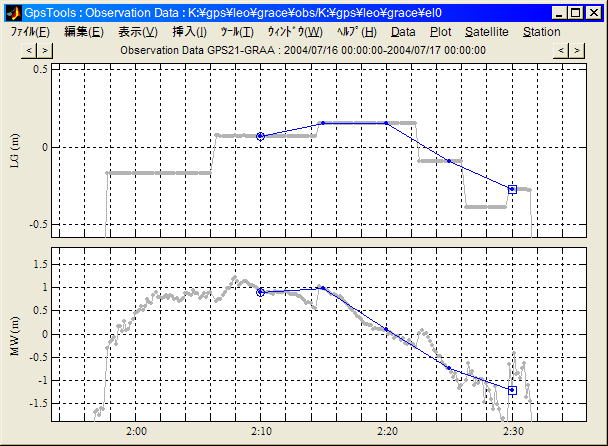
摨忋PRN21塹惎 斃憲攇埵憡娤應抣偺LG(婔壗妛僼儕乕慄宍寢崌)媦傃MW(Melbourne-Wubbena慄宍寢崌)
2:14, 2:22, 2:26, 2:29偺僞僀儈儞僌偱柧傜偐側僒僀僋儖僗儕僢僾偑尒傜傟傞偑専弌偱偒偰偄側偄
(奃怓: 惗娤應僨乕僞(10昩娫妘), 惵: 曇廤嵪娤應僨乕僞(300昩娫妘),
仜:傾乕僋奐巒, 仩:傾乕僋廔椆)
僒僀僋儖僗儕僢僾専弌楻傟偼埲忋偺傛偆偵戝偒側應埵岆嵎偲側偭偰尰傟傞偑丄僒僀僋儖僗儕僢僾偺岆専弌(夁専弌)傕應埵惛搙偺埆壔偲側偭偰尰傟傞丅偙傟偼僒僀僋儖僗儕僢僾曗廋傪峴傢側偄応崌偼傾乕僋挿偑抁偔側傝丄傾乕僋撪偺撈棫惈偺崅偄娤應僨乕僞悢偑尭傝丄悇掕忦審偑埆偔側傞偙偲偵傛傞丅椺偊偽摨帪5塹惎偑娤應偱偒傞応崌丄傾乕僋偼嵟掅偱傕3僄億僢僋埲忋偺娤應僨乕僞傪帩偮昁梫偑偁傝丅(娤應僨乕僞悢5亊3=15,
悇掕僷儔儊乕僞悢: 應埵夝3亊3+斃憲攇埵憡僶僀傾僗5=14)丅傑偨堦斒偵帪崗偺嬤偄僄億僢僋偺娤應僨乕僞偵偼憡娭偺崅偄岆嵎偑娷傑傟傞偙偲偑懡偄偨傔丄僒僀僋儖僗儕僢僾偵傛傞傾乕僋暘抐媦傃抁傾乕僋壔偼偙偺揰偱傕悇掕忦審傪埆壔偝偣傞丅僒僀僋儖僗儕僢僾曗廋傪峴偆応崌丄忦審偵傕傛傞偑岆曗廋傪姰慡偵側偔偡偙偲偑擄偟偔丄岆曗廋偼僒僀僋儖僗儕僢僾専弌楻傟偲摨條偺惛搙埆壔傪堷偒婲偙偡丅
埲忋傛傝丄摿偵Kinematic偺応崌丄僒僀僋儖僗儕僢僾専弌傾儖僑儕僘儉偼専弌楻傟偼柍偔偟丄岆専弌傕嵟彫偵偡傞偲偄偆攚斀偡傞梫媮傪枮懌偡傞昁梫偑偁傞丅
偝偰憡懳應埵偺応崌丄僒僀僋儖僗儕僢僾専弌偼悇掕帪偲摨條偵斃憲攇埵憡娤應抣偺擇廳嵎傪嶌偭偰偐傜専弌傪峴偆偙偲偑懡偄丅偙傟偼塹惎帪寁丄庴怣婡帪寁曄摦傗奺庬偺岆嵎梫場偑徚嫀偝傟傞偨傔僒僀僋儖僗儕僢僾専弌偑梕堈偵側傞偨傔偱偁傞丅
PPP偺応崌丄擇廳嵎偑巊偊側偄偺偱僛儘嵎斃憲攇埵憡娤應抣偺傑傑僒僀僋儖僗儕僢僾専弌傪峴偆昁梫偑偁傞丅僒僀僋儖僗儕僢僾専弌偵偼婔偮偐偺曽幃偑峫偊傜傟傞偑堦斒偵偼暋悢偺曽幃傪慻傒崌傢偣偰梡偄傜傟傞丅偙傟偼専弌惛搙傪忋偘傞偨傔偲丄扨撈偱偼L1,L2斃憲攇埵憡偺偳偪傜偑旘傫偩偐敾掕偱偒偢丄L1,L2斃憲攇埵憡偦傟偧傟偺僗儕僢僾検偺悇掕傕弌棃側偄偙偲偵傛傞丅
僒僀僋儖僗儕僢僾専弌偵巊傢傟傞庡側曽幃傪埲壓偵帵偡丅
(1) LG(斃憲攇埵憡婔壗妛僼儕乕慄宍寢崌)旘傃専弌
(2) MW(Melbourne Wubbena Wide Lane慄宍寢崌)旘傃専弌
(3) LC(斃憲攇埵憡揹棧憌僼儕乕慄宍寢崌)-PC(媅帡嫍棧揹棧憌僼儕乕慄宍寢崌)偺旘傃専弌
(4) WL(Wide Lane慄宍寢崌)僄億僢僋娫3廳嵎
(5) NL(Narrow Lane慄宍寢崌)僄億僢僋娫3廳嵎
LG偼婔壗妛崁(婳摴, 塹惎/庴怣婡帪寁, 懳棳寳抶墑)偑徚嫀偝傟丄偐偮斃憲攇偟偐巊梡偟偰偄側偄偨傔媅帡嫍棧儅儖僠僷僗偺塭嬁傪庴偗側偄丅廬偭偰僒僀僋儖僗儕僢僾偵傛傞旘傃傪敾掕偟傗偡偄丅偨偩偟揹棧憌抶墑崁偑巆偭偰偄傞偨傔揹棧憌抶墑偺曄摦偑寖偟偄応崌傗娤應僄億僢僋娫妘偑戝偒偄応崌偵偼僒僀僋儖僗儕僢僾偲揹棧憌抶墑曄摦偺愗傝暘偗偑擄偟偄丅
MW偼婔壗妛崁媦傃揹棧憌抶墑崁偑徚嫀偝傟偰偄傞偑媅帡嫍棧儅儖僠僷僗偺塭嬁偑戝偒偔媅帡嫍棧娤應忦審偵嫮偔埶懚偡傞丅
LC-PC偼MW偵斾傋偰傕嶨壒偑戝偒偄丅
WL/NL僄億僢僋娫3廳嵎偼庴怣婡偺帪寁偑尨巕帪寁偱側偄応崌丄庴怣婡帪寁曄摦偲僒僀僋儖僗儕僢僾偺愗傝暘偗偑擄偟偄丅傑偨LEO塹惎偺條側崅懍堏摦懱偺応崌傕摨條偺棟桼偱僒僀僋儖僗儕僢僾偺愗傝暘偗偑擄偟偄丅
(偙偺崁懕偔)
.....................................................................................................................................
僒僀僋儖僗儕僢僾曇廤 (2)
僒僀僋儖僗儕僢僾専弌崲擄側帠椺丅偙偺塹惎傪彍奜偡傞偲Kinematic
PPP應埵夝偺戝偒側岆嵎偑側偔側傞偺偱6:55偵僗儕僢僾偟偰偄傞偙偲偼娫堘偄側偄偑LG旘傃1cm埲壓丅MW傕儅儖僠僷僗偱撦偭偰偄偰1cycle
(86cm) 旘傫偱偄傞偐旝柇丅
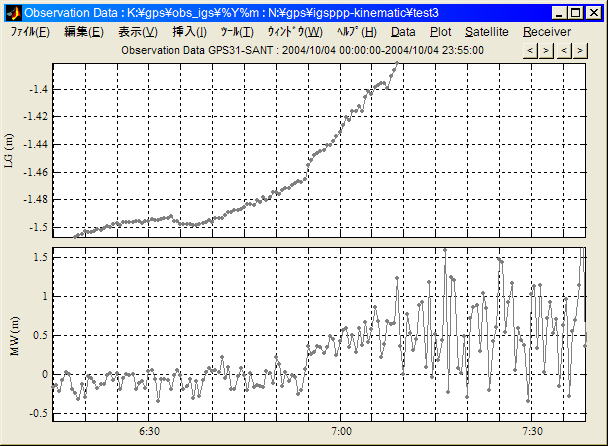
僒僀僋儖僗儕僢僾専弌崲擄側帠椺 (2004/10/4
SANT PRN31娤應僨乕僞)
忋抜: 婔壗妛僼儕乕慄宍寢崌丄壓抜: Melbourne
Wubbena慄宍寢崌丄6:55偵僒僀僋儖僗儕僢僾偑敪惗偟偰偄傞丅
L1/L2僒僀僋儖僗儕僢僾偲LG旘傃検偺娭學丅(1,1),
(4,3), (5,4), (8,6), (9,7), (10,8), (13,10),
(14,11) 偼LG偱偼専弌偑擄偟偄偑丄MW WL偱偼(4,3),
(4,5) 偼1cycle (86cm), (8,6), (9,7), (10,8),
(13,10), (14,11)偼2cycle (172cm) 埲忋旘傇偺偱(1,1)埲奜偼捠忢偼専弌偱偒傞偼偢丅忋偺帠椺偼(4,3)
偐傑偨偼(-1,-1)偐? 偱傕LG旘傃偑彫偝偡偓傞丅
| L1/L2 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.0 | -24.4 | -48.8 | -73.3 | -97.7 | -122.1 | -146.5 | -170.9 | -195.4 | -219.8 | -244.2 | -268.6 | -293.1 | -317.5 | -341.9 | -366.3 |
| 1 | 19.0 | -5.4 | -29.8 | -54.2 | -78.7 | -103.1 | -127.5 | -151.9 | -176.3 | -200.8 | -225.2 | -249.6 | -274.0 | -298.4 | -322.9 | -347.3 |
| 2 | 38.1 | 13.6 | -10.8 | -35.2 | -59.6 | -84.0 | -108.5 | -132.9 | -157.3 | -181.7 | -206.2 | -230.6 | -255.0 | -279.4 | -303.8 | -328.3 |
| 3 | 57.1 | 32.7 | 8.2 | -16.2 | -40.6 | -65.0 | -89.4 | -113.9 | -138.3 | -162.7 | -187.1 | -211.5 | -236.0 | -260.4 | -284.8 | -309.2 |
| 4 | 76.1 | 51.7 | 27.3 | 2.9 | -21.6 | -46.0 | -70.4 | -94.8 | -119.3 | -143.7 | -168.1 | -192.5 | -216.9 | -241.4 | -265.8 | -290.2 |
| 5 | 95.1 | 70.7 | 46.3 | 21.9 | -2.5 | -27.0 | -51.4 | -75.8 | -100.2 | -124.6 | -149.1 | -173.5 | -197.9 | -222.3 | -246.7 | -271.2 |
| 6 | 114.2 | 89.8 | 65.3 | 40.9 | 16.5 | -7.9 | -32.3 | -56.8 | -81.2 | -105.6 | -130.0 | -154.5 | -178.9 | -203.3 | -227.7 | -252.1 |
| 7 | 133.2 | 108.8 | 84.4 | 59.9 | 35.5 | 11.1 | -13.3 | -37.7 | -62.2 | -86.6 | -111.0 | -135.4 | -159.8 | -184.3 | -208.7 | -233.1 |
| 8 | 152.2 | 127.8 | 103.4 | 79.0 | 54.6 | 30.1 | 5.7 | -18.7 | -43.1 | -67.6 | -92.0 | -116.4 | -140.8 | -165.2 | -189.7 | -214.1 |
| 9 | 171.3 | 146.8 | 122.4 | 98.0 | 73.6 | 49.2 | 24.7 | 0.3 | -24.1 | -48.5 | -72.9 | -97.4 | -121.8 | -146.2 | -170.6 | -195.1 |
| 10 | 190.3 | 165.9 | 141.5 | 117.0 | 92.6 | 68.2 | 43.8 | 19.3 | -5.1 | -29.5 | -53.9 | -78.3 | -102.8 | -127.2 | -151.6 | -176.0 |
| 11 | 209.3 | 184.9 | 160.5 | 136.1 | 111.6 | 87.2 | 62.8 | 38.4 | 14.0 | -10.5 | -34.9 | -59.3 | -83.7 | -108.2 | -132.6 | -157.0 |
| 12 | 228.4 | 203.9 | 179.5 | 155.1 | 130.7 | 106.2 | 81.8 | 57.4 | 33.0 | 8.6 | -15.9 | -40.3 | -64.7 | -89.1 | -113.5 | -138.0 |
| 13 | 247.4 | 223.0 | 198.5 | 174.1 | 149.7 | 125.3 | 100.9 | 76.4 | 52.0 | 27.6 | 3.2 | -21.2 | -45.7 | -70.1 | -94.5 | -118.9 |
| 14 | 266.4 | 242.0 | 217.6 | 193.1 | 168.7 | 144.3 | 119.9 | 95.5 | 71.0 | 46.6 | 22.2 | -2.2 | -26.6 | -51.1 | -75.5 | -99.9 |
| 15 | 285.4 | 261.0 | 236.6 | 212.2 | 187.8 | 163.3 | 138.9 | 114.5 | 90.1 | 65.7 | 41.2 | 16.8 | -7.6 | -32.0 | -56.5 | -80.9 |
忋偺帠椺丄偦傟偱偼TEQC偱偼専弌偱偒傞偺偩傠偆偐偲巚偭偰傗偭偰傒偨(TEQC僆僾僔儑儞 : teqc +qc +set_mask 0 +ssv +sym +l -plot)丅 僗儕僢僾専弌悢48丅傗偼傝専弌偱偒側偄丅TEQC偼昗弨愝掕偱偼僒僀僋儖僗儕僢僾専弌偑娒偡偓傞丅偪側傒偵GT偺娤應僨乕僞曇廤寢壥 (儘僌)丅僗儕僢僾専弌悢259丅寢嬊A/S on偺忬懺偱偼媅帡嫍棧儅儖僠僷僗偑戝偒偔偐側傝忦審偺傛偄嬊偱傕姰慡側僒僀僋儖僗儕僢僾専弌偼崲擄偩偲偄偆偙偲丅偙偺曈偼偁傞掱搙妱傝愗傞昁梫偑偁傞丅
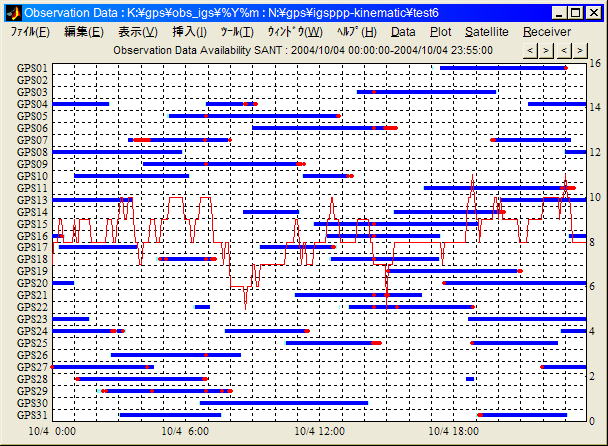
GT偵傛傞SANT 2004/10/4娤應僨乕僞曇廤寢壥
惵慄 : 桳岠娤應僨乕僞桳, 愒揰 : 僒僀僋儖僗儕僢僾,
愒慄 : 娤應塹惎悢
.....................................................................................................................................
GPS惛枾夝愅偱傛偔巊傢傟傞L1,L2斃憲攇埵憡媦傃媅帡嫍棧娤應抣偺慄宍寢崌傪埲壓偵帵偡丅奺慄宍寢崌偺掕媊偵偮偄偰偼暿巻嶲徠丅昞撪偺Typical Noise+Multipath偼暯嬒揑側抣偱偁傞偑丄媅帡嫍棧儅儖僠僷僗偼摿偵掅嬄妏偱戝曄戝偒偔側傞偙偲偑偁傝丄屌掕嬊偱傕嵟戝偱悢m偵払偡傞偙偲偑偁傝偦偺嵺偼MW,
MP1, MP2偺僲僀僘惉暘傕偦傟偵墳偠偰戝偒偔側傞偺偱拲堄偑昁梫偱偁傞丅
| LC | Linear Combination | Wave Length | Relative Ionosphere | Typical Noise+Multipath |
|---|---|---|---|---|
| L1 | L1 Carrier Phase | 19.0cm | 1.0 | 0.3cm |
| L2 | L2 Carrier Phase | 24.4cm | 1.6 | 0.3cm |
| LG | Geometry-free Phase | - | 0.6 | 0.4cm |
| LC | Ionosphere-free Phase | - | 0.0 | 0.9cm |
| MW | Melbourne-Wubbena | 86.2cm | 0.0 | 21cm |
| WL | Wide-lane Phase | 86.2cm | 1.3 | 1.7cm |
| NL | Narrow-lane Phase | 10.7cm | 1.3 | 1.7cm |
| MP1 | L1 Multipath | - | 0.0 | 30cm |
| MP2 | L2 Multipath | - | 0.0 | 30cm |
(Assumption : Typical Noise+Multipath : L1=0.3cm, L2=0.3cm, P1=30cm, P2=30cm)
僒僀僋儖僗儕僢僾曇廤(2)偱彂偄偨専弌崲擄側僗儕僢僾偺椺偼MP1傑偨偼MP2慄宍寢崌傪巊偆偲偆傑偔専弌偱偒傞偙偲偑暘偐偭偨丅MP1,MP2慄宍寢崌偺旘傃傪埲壓偵帵偡丅側偍TEQC偼庢愢傪撉傓尷傝LG亄MP1+MP2旘傃偱僒僀僋儖僗儕僢僾傪専弌偟偰偄傞條偩丅
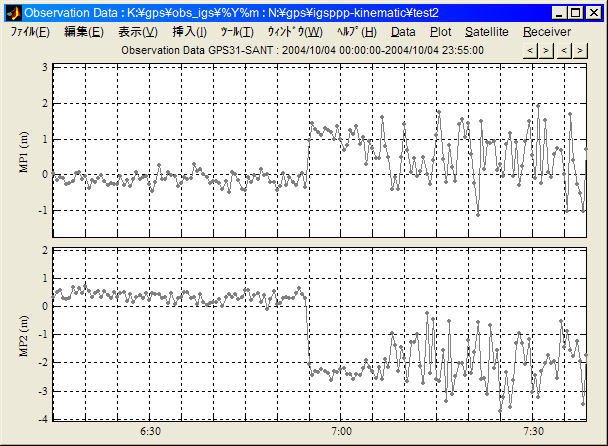
僒僀僋儖僗儕僢僾専弌椺 (2004/10/4 SANT PRN31娤應僨乕僞)
忋抜: L1 Multipath慄宍寢崌丄壓抜: L2 Multipath慄宍寢崌丄6:55偵僒僀僋儖僗儕僢僾偑敪惗偟偰偄傞丅
L1,L2僒僀僋儖僗儕僢僾偵傛傞LG, MW, MP1, MP2偺旘傃検傪暿巻偵帵偡丅(弌椡僾儘僌儔儉)
.....................................................................................................................................
尰嵼僀儞僞乕僱僢僩傪夘偟偰棙梡偱偒傞庡側僆儞儔僀儞GPS惛枾夝愅僒乕價僗媦傃偦偺摿挜傪埲壓偵帵偡丅夝愅傪埶棅偡傞偵偼RINEX娤應僨乕僞傪Web偐傜傑偨偼FTP偵傛傝夝愅僒乕僶偵upload偡傞丅夝愅寢壥偼Email傑偨偼FTP偱庢摼偡傞偙偲偑弌棃傞丅娤應僨乕僞宍幃偲偟偰Compact RINEX媦傃gzip,compress摍偺埑弅僼傽僀儖傕僒億乕僩偟偰偄傞丅OPUS埲奜偼慡悽奅偺娤應揰偺惛枾應埵偑壜擻偱偁傞丅
| Service | Provider | Analysis Eng. | Strategy | Ref. Frame | Ref. Stas | Note |
|---|---|---|---|---|---|---|
| AUSPOS | Geosience Australia (崑) | MicroCosm(R) | 憡懳應埵 (Static) |
ITRF | 嬤椬IGS嬊3嬊 | 24H惛搙悈暯1cm,悅捈1-2cm |
| SCOUT | SOPAC (暷) | GAMIT | 憡懳應埵 (Static) |
ITRF,WGS84 | 嬤椬3嬊 | |
| OPUS | NGS (暷) | page5 | 憡懳應埵 (Static) |
ITRF, NAD83 | 嬤椬CORS3嬊 | 僒億乕僩偼暷崙媦傃堦晹椞堟撪偺傒 |
| AUTO GIPSY | NASA JPL (暷) | GIPSY/OASIS-II | PPP (Static) |
ITRF, WGS84 | - | upload偼anonymos FTP傾僪儗僗巜掕 |
| CSRS-PPP | CSRS (壛) | CSRS-PPP | PPP (Static/Kinematic) |
ITRF, NAD83 | - | 梫儐乕僓搊榐 帪寁/懳棳寳摨帪悇掕 |
僆儞儔僀儞GPS惛枾夝愅僒乕價僗偺惛搙傪昡壙偡傞偨傔丄摨堦偺GPS娤應僨乕僞傪僆儞儔僀儞GPS惛枾夝愅僒乕價僗傪巊偭偰夝愅偟丄偦偺寢壥傪斾妑偟偨丅僨乕僞偲偟偰偼2004/10/3
24H 30昩娫妘偺崙搚抧棟堾 揹巕婎弨揰960698 嬍擵塝偺娤應僨乕僞傪巊梡偟偨丅夝愅忦審偲偟偰偼24H
Static應埵偲偟丄傾儞僥僫婡庬偑巜掕壜擻側傕偺偼AOAD/M_T偲偟偨丅夝愅寢壥媦傃GT
PPP夝傪婎弨偲偟偨岆嵎傕帵偡丅嶲峫偺偨傔崙搚抧棟堾F2夝偺抣傕摨帪偵帵偟偨丅昞拞偱AUTO
GIPSY偺應埵夝偼傾儞僥僫埵憡拞怱偺傕偺偱偁傝傾儞僥僫僆僼僙僢僩傪曗惓偟偰偄側偄丅廬偭偰懠偲摨堦婎弨偱昡壙偡傞偨傔偵偼僆僼僙僢僩暘悅捈嵗昗82mm傪嵎偟堷偔昁梫偑偁傞丅
| Service/ Solution |
ITRF2000 Position | Error wrt GT PPP | Note | ||||
|---|---|---|---|---|---|---|---|
| X (m) | Y (m) | Z (m) | E (mm) | N (mm) | U (mm) | ||
| GT PPP | -3355701.7822 | 4200702.9589 | 3419893.7309 | 0.0 | 0.0 | 0.0 | 丂 |
| AUSPOS | -3355701.783 | 4200702.963 | 3419893.740 | -1.9 | +5.7 | +8.0 | ref:DAEJ,SUWN,SHAO |
| SCOUT | -3355701.7828 | 4200702.9676 | 3419893.7398 | -5.0 | +3.6 | +10.8 | ref:DAEJ,SUWN,SHAO |
| OPUS | -3355701.784 | 4200702.955 | 3419893.746 | +3.8 | +13.8 | +6.5 | out of service range丂 |
| AUTO GIPSY | -3355701.8305 | 4200703.0400 | 3419893.7863 | -12.9 | -3.8 | +108.6 | without antenna offset |
| CSRS-PPP | -3355701.7910 | 4200702.9647 | 3419893.7317 | +3.3 | -4.7 | +8.9 | 丂 |
| GSI F2夝 | -3355701.8161 | 4200702.9610 | 3419893.7359 | +25.2 | -8.1 | +21.9 | 丂 |
.....................................................................................................................................
媅帡嫍棧娤應儌僨儖
P=兿+c(dt-dT)+I+T+兠
偵偍偄偰庴怣婡帪寁岆嵎dt,塹惎帪寁岆嵎dT偼壗傪昞偟偰偄傞偐傪峫偊偰傒傞丅
庴怣婡偱偼庴怣婡帪寁偵廬偭偰堦掕帪娫娫妘偱庴怣應埵僐乕僪埵抲傪應掕偡傞丅傛傝尩枾偵偼庴怣偟偨PRN僐乕僪偵摨婜偝偣偨儗僾儕僇PRN僐乕僪偺僐乕僪僔乕働儞僗忋偺埵抲傪應掕偡傞丅偨偩偟偦偺應掕僞僀儈儞僌偺愨懳帪崗tr'偲庴怣婡帪寁偱偺應掕帪崗tr(偙傟偼晛捠抂悢偼偱側偄)偲偺嵎偑帪寁岆嵎偲尵偆傢偗偱偼側偄丅兿偼傾儞僥僫埵憡拞怱娫嫍棧偲偟偰掕媊偝傟傞偐傜娤應儌僨儖傪忋婰偺傛偆偵彂偔偨傔偵偼丄帪娫傪慿偭偰傒偰應掕偟偨應埵僐乕僪(偺埵抲)偑斃憲攇偵嵹偭偰庴怣傾儞僥僫埵憡拞怱偵擖幩偟偨僞僀儈儞僌偺愨懳帪崗t偲庴怣婡帪寁偱偺應掕帪崗tr偺嵎傪庴怣婡帪寁岆嵎dt偲偟側偗傟偽側傜側偄丅廬偭偰dt偵偼杮棃偺庴怣婡帪寁岆嵎偵壛偊庴怣働乕僽儖抶墑傗庴怣婡夞楬抶墑儮tr偑娷傑傟傞丅偙傟傜偺抶墑偼堦斒偵僐乕僪偵傛傝堎側傞偐傜丄帪寁偼堦偮偩偲偟偰傕僐乕僪偑堎側傞偲帪寁岆嵎dt傕堎側傞偙偲偵側傞丅媅帡嫍棧僶僀傾僗(庴怣婡DCB)偼庡偵偙偺抶墑偺嵎偵傛傝惗偠傞丅(側偍庴怣僐乕僪偲儗僾儕僇僐乕僪偺摨婜岆嵎傕偁傞偼偢偩偑偙傟偼娤應岆嵎偲偟偰埖偆偺偑懨摉偱偁傞)
偦傟偱偼塹惎帪寁岆嵎dT偲偼壗偐丅應掕偟偨應埵僐乕僪埵抲偑昞偡帪崗ts偲偙偺應埵僐乕僪偺嵹偭偨斃憲攇偑塹惎傾儞僥僫偺埵憡拞怱傪弌敪偟偨愨懳帪崗(t-冄)偲偺嵎偲偟側偗傟偽側傜側偄丅偙傟傕應埵僐乕僪埵抲偑昞偡帪崗ts偲塹惎偱偺應埵僐乕僪惗惉僞僀儈儞僌偺愨懳帪崗ts'偺嵎偱偼側偄丅庴怣婡偲摨條偵夞楬抶墑傗憲怣働乕僽儖抶墑儮ts偑娷傑傟傞丅偙傟偑塹惎DCB偑惗偠傞尨場偲側傞丅
側偍埲忋偼偁偔傑偱娤應儌僨儖傪忋偺條偵彂偔偨傔偺掕媊偱偁傝捈姶揑側帪寁偺堄枴偲偼堎側偭偰偄傞丅悢幃偱昞偟偰傒傛偆丅
dt1=tr-t1=tr-tr'+儮tr1
dt2=tr-t2=tr-tr'+儮tr2
dT1=ts1-(t1-冄)=ts1-(ts1'+儮ts1)
dT2=ts2-(t2-冄)=ts2-(ts2'+儮ts2)
DCBr=儮tr1-儮tr2=dt1-dt2
DCBs=儮ts2-儮ts1佮dT1-dT2 (ts1-ts1'佮ts2-ts2')
P1-P2揹棧憌僼儕乕慄宍寢崌偱帪寁岆嵎dt,dT傪掕媊偡傞偲偟偰
dt=C1*dt1+C2*dt2=dt1-C2*DCBr=dt2+C1*DCBr
dT=C1*dT1+C2*dT2=dT1-C2*DCBs=dT2+C1*DCBs
(C1=f1^2/(f1^2-f2^2),C2=-f2^2/(f1^2-f2^2))
P1=兿+c(dt1-dT1)+I1+T+兠1=兿+c(dt-dT)+I1+T+兠1-c*C2*(DCBr-DCBs)
P2=兿+c(dt2-dT2)+I2+T+兠俀=兿+c(dt-dT)+I2+T+兠2+c*C1*(DCBr-DCBs)
PC=C1*P1+C2*P2=兿+c(dt-dT)+T+兠 (ion-free媅帡嫍棧)
尩枾偵尵偊偽働乕僽儖丒夞楬抶墑傕帪娫曄摦偡傞偩傠偆偐傜帪寁岆嵎偵偼偦傟傜偺曄摦傕娷傑傟偰偄傞偲尵偊傞丅
偙偙偱廳梫側偺偼
丒帪寁偼傾儞僥僫埵憡拞怱偱掕媊偡傞丅
丒帪寁岆嵎偵偼働乕僽儖丒夞楬抶墑偑娷傑傟偰偄傞
丒偳偺僐乕僪偱帪寁岆嵎傪掕媊偟偨偐偵傛傝偦偺抣偑曄傢傞丅
偙偲偱偁傞丅
帪崗摨婜偵GPS傪巊偆応崌丄埲忋偺條偵帪寁岆嵎偑傾儞僥僫埵憡拞怱偱媮傑傞偺偱丄幚嵺偺帪寁岆嵎傪媮傔傞偨傔偵偼働乕僽儖丒夞楬抶墑暘傪曗惓偟偰偁偘傞昁梫偑偁傞丅偙偺抣偼GPS娤應偱偼媮傔傛偆偑側偄偺偱暿搑寁應偟偰棊偲偡丅偙傟傜偺抶墑偑曄摦偟側偄傛偆惛枾帪崗摨婜梡偵偼壏搙曗彏偝傟偨摿暿偺働乕僽儖傗庴怣婡傪巊偆條偱偁傞丅
(偙偺崁懕偔)
.....................................................................................................................................