GPS L1アンテナ・受信機評価
Evaluation of GPS L1 Antenna/Receivers |
更新 2009/06/18
2008/05/25 |
Home |
Abstract
廉価一周波GPSアンテナ及び受信機によるRTK-GPS性能を評価するための基礎データとして、GPS
L1 アンテナ及び受信機の特性を計測した。計測した特性としてはアンテナ位相中心オフセット・変動、搬送波位相マルチパス、コードマルチパス、搬送波雑音電力密度
(C/N0) である。またこれらのアンテナ及び受信機の組み合わせで一周波RTK-GPS性能の評価を行った。評価内容としてはRTK-GPS性能
(基線長=1 m)、RTK-GPS性能 (基線長=7 km)、RTK-GPS初期化時間である。
高須, 低価格一周波受信機を使ったRTK-GPS性能の評価、課題とその解決策, 日本地球惑星科学連合2008年大会 (発表資料PDF)
T.Takasu and A.Yasuda, Evaluation of RTK-GPS Performance with Low-cost
Single-frequency GPS Receivers, International Symposium on GPS/GNSS 2008,
November 11-14, 2008, Tokyo International
Exchange Center, Japan 11/18追加
解析ツール Analysis Tool : ANTTOOL 1/14 更新
評価結果 7/25更新
Evaluation Results
(1) アンテナ位相中心オフセット・変動 (Antenna
Phase Center Offset/Variation)
(2) マルチパス (サマリ) (Multipath Summary)
(3) マルチパス (搬送波位相) (Carrier-Phase
Multipath)
(4) マルチパス (コード) (Code Multipath)
(5) 搬送波雑音電力密度 (Carrier To Noise
Power Density C/N0)
(6) RTK-GPS性能 基線長=1 m (RTK-GPS Performance,
Baseline Length=1 m)
(7) RTK-GPS性能 基線長=7 km (RTK-GPS Performance,
Baseline Length=7 km)
(8) RTK-GPS初期化時間 (RTK-GPS Time To First
Fix with Ambiguity Resolution)
評価アンテナ
Evaluated Antennas
| Vendor |
Antenna |
Objective |
Freq. |
Type |
Active/
Passive |
LNA |
Size
(mm) |
weight
(g) |
Price |
Image |
| Gain |
NF |
| NovAtel |
GPS-702-GG |
Geodetic/
Reference |
L1/L2 |
Pinwheel |
Active |
29dB |
2.0dB |
185Φx69 |
500 |
$995 |
 |
| u-blox |
ANN-MS |
General |
L1 |
Patch |
Active |
27dB |
1.5dB |
40x48x13 |
105 |
$31 |
 |
Aero
Antenna |
AT575 |
General |
L1 |
Patch |
Active |
12dB |
? |
53Φx13 |
113 |
$200 |
 |
| AntCom |
4G15A2-XS-3 |
Mini-Arinc
Airborne |
L1 |
Patch? |
Active |
? |
? |
55x86x17 |
? |
$194 |
 |
Micro
Pulse |
2335TB |
Vehcle
Tracking |
L1 |
Patch |
Active |
26dB |
<2.5dB |
65Φx12 |
28 |
$47 |
 |
| PCTel |
GPS-TMG-40N |
Timing |
L1 |
Herix |
Active |
40dB |
<2.5dB |
80Φx125 |
300 |
$219 |
 |
| Pioneer |
GPS-M1ZZ Ant |
General |
L1 |
Patch |
Active |
? |
? |
31x35x12 |
? |
? |
 |
Aero
Antenna |
AT2775-43 |
Geodetic/
Reference |
L1/L2 |
Choke Ring |
Active |
40dB |
? |
357Φx80 |
2,500 |
? |
 |
| Trimble |
Bullet III |
General |
L1 |
? |
Active |
35dB |
<3.3dB |
78φx66 |
170 |
$125 |
 |
** Evaluation Planned
評価受信機
Evaluated Receivers
| Vendor |
Receiver |
Objective |
Freq. |
# of Channel |
Max
Rate |
DGPS |
Output |
Size
(mm) |
Price |
Image |
| NovAtel |
OEMV-3 |
Geodetic/
Reference |
L1/L2 |
48ch |
20Hz |
SBAS/
RTCM |
NMEA/
Binary |
185x160x71 |
$7,995 *4 |
 |
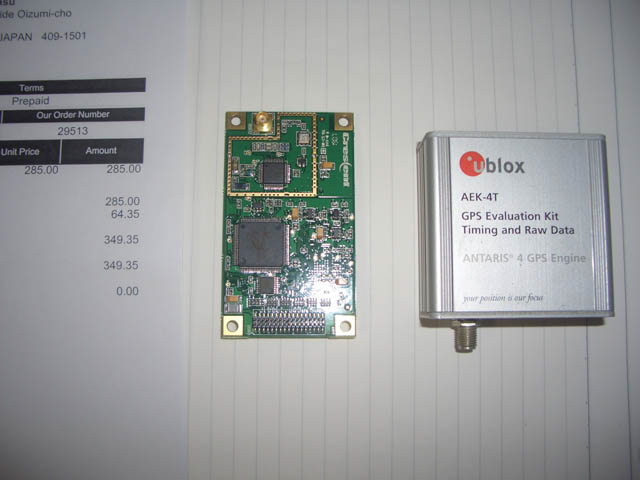
| u-blox |
AEK-4T |
General/
Timing |
L1 |
16ch |
4Hz/
10Hz *1 |
SBAS/
RTCM |
NMEA/
Binary |
17x22x3
(Module) |
$179
(Module) |
 |
| u-blox |
EVK-5H *3 |
General |
L1 |
50ch |
4Hz/
10Hz *1 |
SBAS/
RTCM |
NMEA/
Binary *3 |
17x22x3
(Module) |
$99
(Module) |
 |
| NovAtel |
Superstar II (OEM Board) |
Genaral |
L1 |
12ch |
1Hz/
5Hz *2 |
SBAS/
RTCM |
NMEA/
Binary |
71x46x13 |
$165 |
 |
| Garmin |
GPS-15L-W
(Module) |
General |
L1 |
12ch |
1Hz |
SBAS/
RTCM |
NMEA/
Binary |
36xx46x8 |
$60 |
 |
| Hemisphere |
Crescent
(OEM Board) |
General/
RTK-GPS |
L1 |
12ch |
10Hz/
20Hz *2 |
SBAS/
RTCM |
NMEA/
Binary |
71x40x12 |
$285 |
 |
Magellan **
(Thalles) |
AC12
(Module) |
General |
L1 |
12ch |
1Hz |
SBAS/
RTCM |
NMEA/
Binary |
40x61x13 |
$106 |
- |
USGlobalSat
** |
ET202 (SiRF II)
(Module) |
General |
L1 |
12ch |
1Hz |
SBAS/
RTCM |
NMEA/
Binary |
31x31x7.6 |
$57 |
 |
*1 Raw Measurement, *2 Optional, *3 only
F/W ver. 3.00, unable output raw data after F/W ver.4.00, *4 No RTK Option
** Evaluation Planned
付録 アンテナ/受信機評価方法
Appendix Antenna/Receiver Evaluation Methods
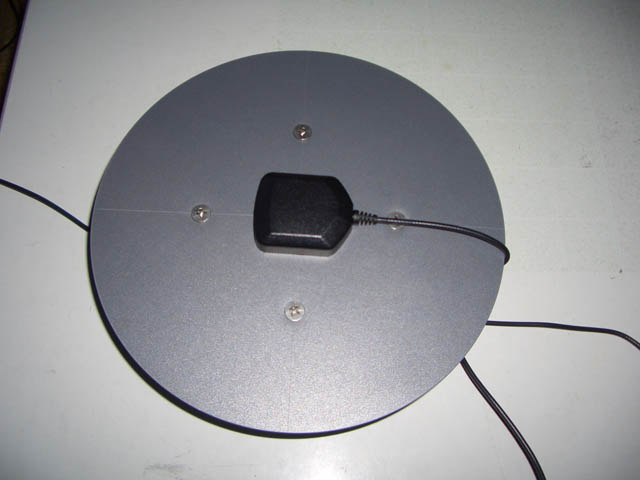
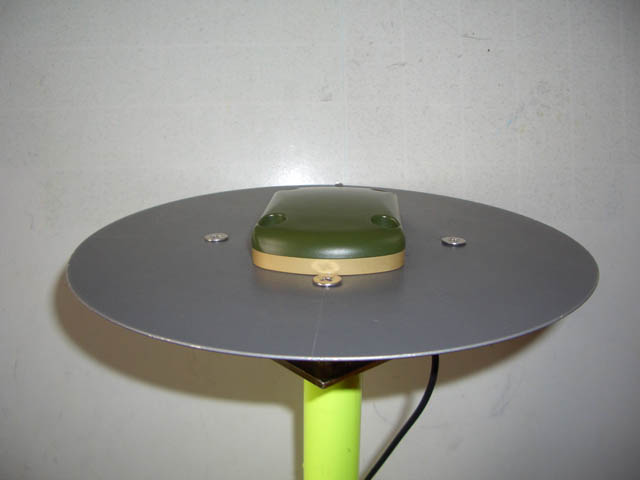
(1) 構成 Configuration
(a) アンテナ・受信機の系統図及びアンテナ設置状況
(b) アンテナマウント・グランドプレーンの位置関係: antmount.pdf
(2) アンテナ位相中心オフセット・変動 (Antenna
Phase Center Offset/Variation)
(a) ターゲットアンテナ/受信機、基準アンテナ/受信機で取得したL1搬送波位相観測値の二重位相差φ1に関し、観測方程式 [1] による基線解析によりターゲットアンテナ位相中心位置を求める。なお基準アンテナ座標は固定し、ターゲットアンテナ位相中心位置座標及び搬送波位相バイアスを一定値として推定する。整数バイアスはFIXせずフロート解として推定する。観測データは24H分
10s間隔のデータとする。
λ1φ1 = ((ρua - ρub) - (ρra - ρrb)) + λ1N + ε ....... [1]
ここでλは搬送波波長、ρは衛星-アンテナ位相中心間の幾何学距離、Nは整数バイアス、εは観測誤差を示す。
(b) (a) で求めたターゲットアンテナ位相中心位置を固定し、再度ターゲットアンテナ/受信機、基準アンテナ/受信機で取得した搬送波位相観測値による二重位相差φ1に関し、観測方程式 [2] を使った基線解析によりアンテナ位相中心変動パラメータ及び搬送波位相バイアスを一定値として推定する。ここでアンテナ位相中心変動Δφpcvは [3] 式に示す球面調和関数により表わす。
λ1φ1 = ((ρua - ρub) - (ρra - ρrb)) + λ1N + Δφpcv + ε ....... [2]
Δφpcv = Σ Σ (Pnm(cos(2*z)) * (Anm * cos(m*a) + Bnm * sin(m*a)))) ....... [3]
ここでPnmは正規化ルジャンドル倍関数、zは衛星天頂角、aは衛星方位角であり
アンテナ位相中心変動パラメータとして未知係数
{A00, A10, A11, B11, A20, A21, B21,...} を推定する。なお球面調和関数の次数は10階5次とした。
(3) 搬送波位相マルチパス (Carrier-Phase Multipath)
(a) (2) (b) の推定時に搬送波位相観測値の事後残差及び衛星方位仰角を出力させる。事後残差には基準受信機を基準としたターゲット受信機の搬送波位相マルチパス+受信機雑音が含まれる。
(b) (a) で抽出したマルチパス+受信機雑音からrunning
average filterにより受信機雑音成分を低減する。
(4) コードマルチパス (Code Multipath)
(a) 基準アンテナ及び受信機で取得した2周波搬送波位相観測値φ1r, φ2r から以下 [4] 式により衛星毎のL1電離層遅延変動
I1 を求める。観測データは24H分 10s間隔のデータとする。
I1 = - (λ1φ1r - f12/ f22 λ2 φ2r) / 2; I1 = I1 - mean(I1) ...... [4]
(b) ターゲット疑似距離観測値P1及び搬送波位相観測値φ1 のGeometry Free線形結合と(a)の電離層遅延変動から
以下 [5] 式によりターゲット受信機のコードマルチパス+受信機雑音MP1を抽出する。
MP1 = P1 - λ1 * φ1 - 2 * I1; MP1 = MP1 - mean(MP1) ...... [5]
(c) (b)で抽出したマルチパス+受信機雑音からrunning
average filterにより受信機雑音成分を低減する。
(5) 搬送波電力雑音比 (Carrier To Noise Power
Density C/N0)
ターゲット受信機が出力する搬送波電力雑音比
(C/N0) と放送暦 (ephemeris) により計算した観測時刻の衛星方位・仰角から、C/N0
スカイプロットまたはC/N0-仰角グラフとして描画する。なおC/N0の代わりにSNR
(信号雑音比) を出力する受信機に関しては以下の概算変換式によりC/N0に変換して表示する。
C/N0 = SNR +30dB ...... [6]
(6) RTK-GPS測位性能 (RTK-GPS Performance)
取得したターゲットアンテナ/受信機の観測データと基準局観測データを使った後処理基線解析により測位解を計算する。条件としてはRTK-GPS測位条件と同等とする。出力された測位解を使ってFIX率、整数バイアス正解率、測位解精度を解析する。
(7) RTK-GPS初期化時間 (RTK-GPS Time To First
Fix with Ambiguity Resolution)
取得したターゲットアンテナ/受信機の観測データと基準局観測データを使った後処理基線解析により測位解を計算する。条件としてはRTK-GPS測位条件と同等とする。解析を開始するエポックを30秒ごとにずらし解析開始後最初に整数バイアスがFIXするまでの時間
(初期化時間) を計測する。整数バイアス正解率や初期化時間の分布を解析する。
Home


