| Overview | Specifications | Program Execution | Parameter Estimator | Plot Data | Utilities | Data Files | Libraries |
|
GPS Precise Analysis Software GpsTools: Parameter Estimator (4) |
| (1) (2) (3) (4) (5) (6) (7) (8) |
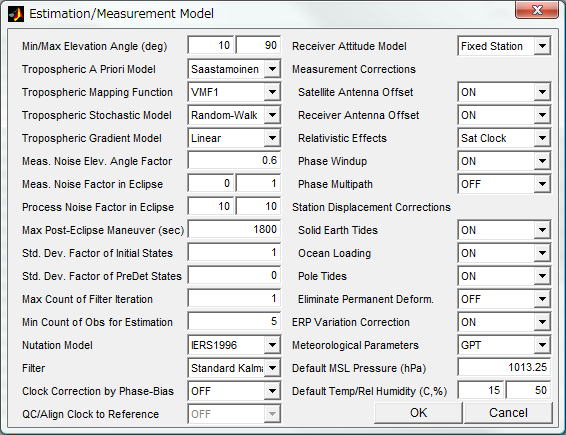
Estimation/Measurement Model Setting
| Item | Operation |
|---|---|
| Min/Max Elevation Angle | Set the minimum elevation angle (cutoff angle) (deg) and maximum elevation angle (deg) |
| Tropospheric Model | Set the zenith tropospheric delay model. - No Tropos : no tropospheric delay model - Saastamoinen : Saastamoinen model |
| Tropospheric Mapping Function | Set the tropospheric mapping function. - COSZ : cos z mapping function - NMF : Niell Mapping Function (NMF) - GMF : Global Mapping Function (GMF) - VMF1 : Vienna Mapping Function 1 (VMF1). To use VMF1, VMF1 Grid data have to be installed into the directory of Tropos/Meteo Parameters specified by Data Directory/Files Setting dialog. |
| Tropospheric Stochastic Model | Set the stochastic model of tropospheric
parameter variation. - Random-Walk : Random-Walk process model - Gauss-Marcov : Gauss-Marcov process model |
| Tropospheric Gradient Model | Set the tropospheric gradient model. - (blank) : No tropospheric gradient model - Linear : Linear tropospheric gradient model - Quadratic : Quadratic tropospheric gradient model |
| Meas. Noise Elev. Angle Factor | Set the weighting factor of measurement noise by elevation angle. If setting it 0, the weighting factor is always 1. If setting it 1, the weighting factor is 1/sin(El). Refer Measurement Noise Factor. |
| Meas. Noise Factor in Eclipse | Set the factor of measurement noise in eclipse
or post-eclipse maneuver period for Block
II/IIA and Block IIR/IIR-M. If setting it 0, the observation data in eclipse or post-eclipse maneuver period are excluded. |
| Process Noise Factor in Eclipse | Set the factor of process noise of satellite position/velocity in post-eclipse maneuver period for Block II/IIA and Block IIR/IIR-M. |
| Max Post-Eclipse Maneuver | Set the maximum period (s) of post-eclipse maneuver. |
| Std. Dev. Factor of Initial States | In case of estimation with multiple paths, set the factor of the initial standard deviations of estimated states. The initial standard deviations of a path are set to last standard deviations of previous path multiplied by the factor. If set it 0, the standard deviations of the states are reset to initial values in each path. |
| Std. Dev. Factor of PreDet States | In case of providing the standard deviations of the predetermined states, set the factor of the standard deviations. If set it 0, the errors are treated as 0. |
| Max Count of Filter Iteration | Set the maximum number of iteration of the filter. Usually set it 1. |
| Min Count of Obs for Estimation | Set the minimum number of observation data to estimate parameters. If the number of observation data in an epoch is less than the value, the any results of the parameter estimation will be acquired. |
| Nutation Model | Set the nutation and precession model. - IAU1976/1980 : IAU1976 nutation + IAU 1980 precession + deps/dspi - IERS1996 : IERS1996 nutation/precession |
| Filter | Set the type of filter. - Standard Kalman : Standard Kalman filter |
| Clock Correction by Phase-Bias | In case of estimating satellite or receiver
clock biases, the clock bias values are corrected
by using the average of the phase-bias estimations
for the period. ÅEOFF : No correction of satellite/receiver clock by phase-bias. ÅEON : Correction of satellite/receiver clock by phase-bias. |
| Align Clock to Reference | Set whether the alignment of estimated clock
to reference clock is enabled or disabled. - OFF : No alignment to reference clock - IGS Final : Align estimated clock to IGS Final clock - IGS Rapid : Align estimated clock to IGS Rapid clock - IGS-CODE : Align estimated clock to IGS Final-CODE clock |
| Receiver Attitude Model | Set the attitude model of the receiver antenna. - Fixed Station : Receiver antenna is fixed to the earth - LEO Satellite : Receive antenna is fixed to satellite body. The Z-axis of the satellite is toward to the each center and X-axis is along the orbit path. |
| Measurement Corrections | Set whether the measurement corrections are
enabled or disabled. - Satellite Antenna Offset : Satellite antenna offset and variation - Receiver Antenna Offset : Receiver antenna offset and variation - Relativistic Effects : Relativistic effects - Phase Windup : Phase windup effects - Phase Multipath : Phase multipath |
| Station Displacement Corrections | Set whether the site displacement corrections
by earth tides are enabled or disabled. - Solid Earth Tides : Displacement by solid earth tide - Ocean Loading : Displacement by ocean loading - Pole Tides : Displacement by pole tide - Eliminate Permanent Deform. : Eliminate permanent deformation term |
| ERP Variation Correction | Set whether the correction for ERP subdaily variation is enabled or disabled. |
| Meteorological Parameters | Set the meteorological parameters (pressure,
temperature, humidity) model. - Standard Atmosphere : standard atmosphere - GPT : Global Pressure and Temperature (GPT) model - JMA GSM Online : Input from JMA NWM (GSM) - JMA MSM Online : Input from JMA NWM (MSM) |
| Default MSL Pressure | Set the default mean sea level pressure (hPa) for standard atmosphere. |
| Default Temp/Rel Humidity | Set the default mean sea level temperature (C) and relative humidity (%) for standard atmosphere. |
| OK | Enable changes and close dialog. |
| Cancel | Abandon changes and close dialog. |
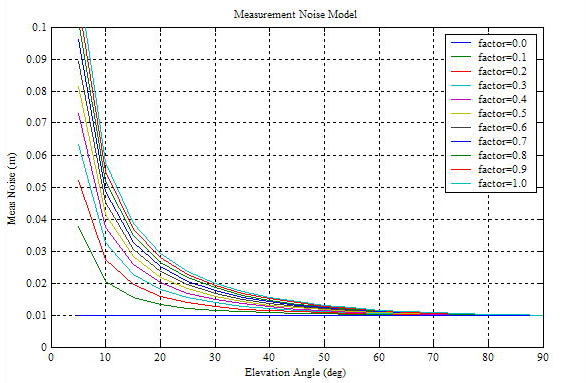
(Measurement Noise = 0.01m)
| Copyright (C) 2004-2008, T.Takasu, All Rights Reserved. |