|
日記・備考録 |
2006 | 2007/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2008 |
| February | March 2007 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
April | Home |
.....................................................................................................................................
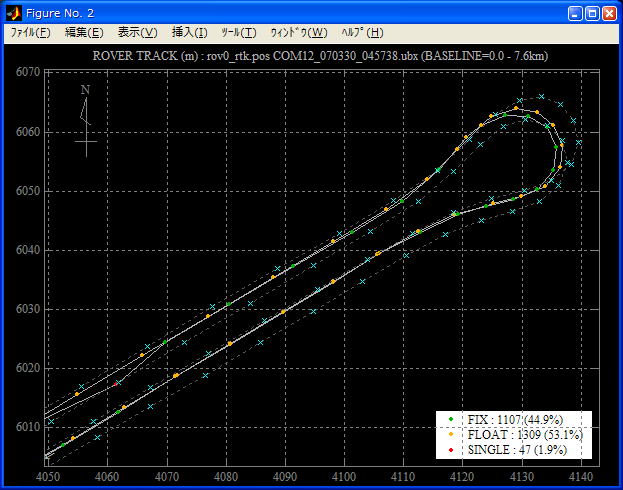
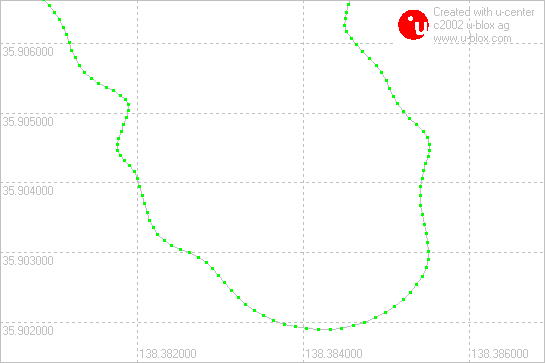
昨日取った移動体データの解析。・+実線はNovAtelのRTKLIB-kinematic解、×+点線はubloxのMSAS-DGPS解。それぞれのアンテナ位置は50cm程離れている。kinematic解の基準局座標は近くの電子基準点との基線解析(static)で決めているので多分数cmの絶対精度はある。
ublox解は大変滑らかな軌跡を描くのだが下のように同じ道路を走行しても軌跡が重ならない。従って絶対座標はせいぜい2-3mの精度しかない。ただ短期的な相対精度はそんなに悪くないので使っているフィルタが自動車走行にうまくマッチしている可能性が高い。kinematic解もオプションでフィルタを導入できる様にした方がよいだろう。現実のデータを取って解析してみると机上検討ではなかなか見えにくい改善点や問題点が沢山出てきて大変有用だと改めて思う。
......................
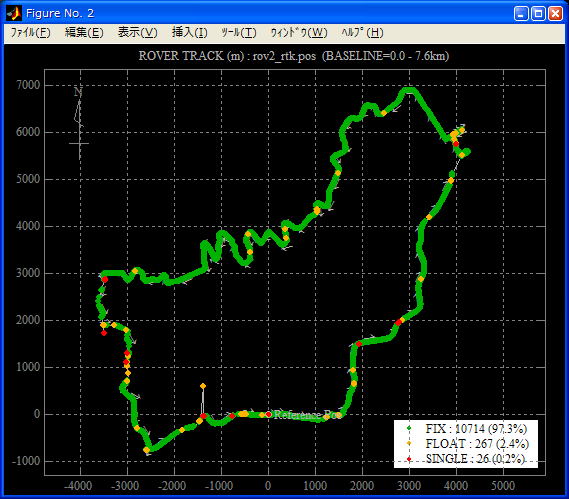
基準局アンテナを屋根の上に上げて再チャレンジ、今度は4Hzでサンプリングしてみた。RTKLIB-kinematic-combined解でFIX率97.3%。うーん今度はちょっと良すぎる。よーく見ると明らかにミスFIXしている点が何点かある。これはもう少し色々とデータを取ってみないとダメだな。
......................
The 4th Annual ION Autonomous Lawnmower Competition, Wright State University Dayton, Ohio, 31
May, 2007
第4回自動芝刈り機コンペティション。ION Satellite
Divisionがスポンサになっている。昨年はオハイオ大が優勝し$8,000を獲得した。日本でも昨年のGPS/GNSSシンポジウムで第一回GPSロボットカー学生コンテストが実施され、防衛大チームが完璧な走行で優勝したらしい。今年も開催されるようなので興味のある学生さんは是非沢山参加して、盛り上げてほしいと思う。
.....................................................................................................................................
天気も良いのでNovAtelと一緒にちょっとドライブ。アンテナは磁石式マウントで車の背。かわいそうなので一緒にubloxも乗せてあげる。高感度だけあって衛星はubloxの方が良く入る。ubloxはSBAS
enabledで試験信号利用on。コースは3/5と大体同じ。RTKLIBの後処理キネマティックcombinedモードでFIX率50.1% (拡大)。思ったより良くない。
基準局アンテナはベランダに測量用三脚で設置しただけなので上空視界が悪い。これは屋根の上まで出さないとダメだろう。



基準局アンテナの向こう側遠くに写っているのは甲斐駒、北岳、鳳凰三山。屋根の上に設置できれば360度仰角3度位までは障害物はない環境。でも実は屋根に登るのが大変なのと取り外しが簡単に出来なくなるのでどうしようか迷っている。
.....................................................................................................................................
某2周波GPS受信機+アンテナ届く。アムテックスさん経由で発注して2週間強。早い。某と言ってもNovAtel社のOEMV-3という新しい受信機。RTKファームなしの20HzRAW出力。L2Cは既に入っていてGLONASSとL5はファーム更新(有償)で対応。実はRTK実験用に2式購入したので全部で中型乗用車並の価格である。将来的に劇的に価格が下がるのは見えているが今必要なので仕方ない。少し過分な設備投資なのだが成果を出してなんとか回収できるようにしたい。
ちょっと分解してみたが、上に見えている基板は単純なI/F変換なのでエンジンは1枚、メーカがその気になればすぐに価格を1桁は下げられるはずである。すなわち9割はパテント料と言うことになる。



3/17に書いた幾何学距離計算につき補足を追加した。結局単独測位計算一つとっても色々な解法があり、その最終解はほぼ一致する。どれを選ぶかは色々な条件とその人の趣味ということになる。
.....................................................................................................................................
最近のLinuxは標準でtelnetdもftpdも入らないのでセットアップが面倒。単にPCからtelnetでログインして操作したいだけなのだが。今時セキュリティに厳しいのは仕方ないと思うが、昔のunixのゆるーい感じが懐かしい。teratermでのtelnetログインは諦めて、PuTTYというsshクライアントを取ってきて遠隔ログインで操作することにする。でもこれパッチ当てないと日本語が通らない様だ。また面倒。FTPもWinSCPというssh経由クライアントを拾ってきて使うことにした。
いつもコマンド名忘れるので備考: デーモン起動設定管理 = chkconfig
はじめての自宅サーバ構築 ~Fedora/CentOS~
Fedora Coreサーバ設定。セキュリティ強化で昔に比べ色々と面倒になっているので、単純なことを単純にやるのは結構大変。もうシステム管理者にはなれそうもない。
.....................................................................................................................................
松原, 日本のソフトウェア産業、衰退の真因, 日経ItPro
ソフトウェア産業の端にいる人間として、暗澹となる様な内容。正直どうしたら良いのか良く分からないのだが教育の重要性は感じる。ただ高校に導入された「情報」授業の現状や大学におけるIT教育の内容を外から見たり聞いたりしている限り、教える側の人材不足は深刻である。やはりインド人にはもう勝てないのかも知れない。
ST100にスリムCDROMドライブを組み込み、Fedora Core 6をインストール。あっけなく終了。最近のLinuxはH//W対応が良いので、昔のようにLANカードを選ばないとネットワーク接続もできないといったこともない。でも久しぶりにLinuxを弄ったので殆どコマンドを忘れかけている。とりあえず今日はOSインストールのみで寝る。
.....................................................................................................................................
GPSによる無人田植機、農家水田で発の実演、中央農業総合研究センター, 2005
田植えロボットにネットワークRTKを応用した事例。この資料ではGPSとしか書いていないがジェノバの発表を見るとVRSを使っているようだ。田植え機本体の値段がどれ位するか知らないが多分\数100万だろうから、やはりRTKのイニシャルコスト、運用コストとも現状より1桁下げないとなかなか普及するところまでいかないのではと思う。
運用コストは、分散型ネットワークRTKを使って自前で安価に基準局網を設置できる様になるとずいぶん削減できる。ただ現行ではやはり2周波受信機がイニシャルコストを引き上げるので、受信機も1桁以上安くならないと普及は難しいだろう。どうせ将来安くなるのは見えているので、そろそろどこかが安価な2周波受信機を出さないだろうか。
.....................................................................................................................................
「進展するロボット化技術と農業機械の開発改良」セミナーレポート(前編), Robot Watch
田植えロボットにRTK-GPSが応用された例が紹介されている。農業ロボット用の要素技術として精密航法システムが重要で、GPS以外にも光学測量等色々な手法が実験されているようだ。ネットワークRTKも当然これらの応用に有望だろう。この例に限らず10cm精度の精密測位が安価に実現できれば色々な分野で需要はかなりあると思う。
NTRIP Networked Transport of RTCM via Internet
Protocol Downloads
RTCM NTRIPプロトコルのサンプル実装集。NTRIP自体はTCP/HTTPベースの非常にシンプルなプロトコルであるが、サーバ側でスケーラブルな性能を得るためには実装上は色々な考慮が必要になる。携帯パケット回線経由のアクセスが実用になるのかもちゃんと評価してみないといけない。なおNTRIPがHTTPを使っているのはファイアウォールやプロキシ経由でもサーバ(NtripCaster)にアクセスしやすいとの理由による。すなわちWebだけはアクセス可能になっているネットワークが多いので、同一I/Fにすれば途中で遮断されにくいとの意図である。ただNTRIP
ver.1.0はHTTPと完全なコンパチビリティがないらしくver.2.0では仕様変更されるかもしれない。またUDP/RTPへの拡張も検討されている様である。(調べた範囲ではまだver.2.0は正式版にはなっていない様)
なお無線通信では回線が不安定になりがちで、TCPの場合回線が切れた後に再接続するとTCPのレベルで再送が発生してしまうので後から送ったデータにも遅延が発生する。すなわちTCPはリアルタイム無線通信に向いているとは言い難い。そういった点でも携帯パケット経由NTRIPを使ったRTK補正情報配信に実用性があるかはちゃんと評価する必要がある。
.....................................................................................................................................
ST100にFedora Core 6を入れようとしてUSB-CDROMドライブを繋いでブートしようとしたら起動しない。BIOSセットアップでブートデバイスにUSB-CDROMが選択できないので、BIOSが対応していない様だ。安く上げるためにCDROMなしの構成でたのんだのがまずかった。でもCDROMなし構成ではHDが飛んだ際の再インストールも不可能
(まあネットワークブートと言う手はあるのだが)
なので、構成で選べること自身不親切だと思う。
さて、ノートPC用スロットインタイプのスリムCDROMドライブが必要なのだが、ちょっとコネクタが特殊だし、近くのPCショップでは置いていないだろう。仕方ないので来週東京に出た際に秋葉原に行って探すことにする。(mac
miniのドライブを取り出して使うという手もあるがmac
miniは分解が大変なのでおとなしく新しいのを買うことにする)
J.B.Tsui, Fundamentals of Global Positioning System
Receivers, A Software Approach, Second Edition, Wiley Interscience, 2005
GPS受信機技術の基礎。GPS信号構造+コード捕捉/追跡の原理+航法アルゴリズム+etc。ほぼ他の参考書でカバーされている内容なので買わなくても良かったかも知れない。(民生用)2周波受信機のP(Y)コード捕捉/追跡技術(コードレス/セミコードレス)の解説を探しているのだが、これはやはり論文から調べないとダメなようだ。もしかすると特許公報を探した方がよいのかも知れない。
.....................................................................................................................................
 |
EPSON DIRECTのST100という小型PC届く。上に載っているのはmac mini
(G4)。思ったより大きかった。Celeron M 1.46GHz、HD40GB、RAM256MB、CDROMなしという構成で約\5.5万。目的はLinuxを入れてRTK基準局サーバにする。 x86の小型PCでなるべく安いものを探してこれになった。Windows XPがプレインストールされているので実行速度を測る。メインのC2D 2.4GHzで8秒かかる後処理キネマティック解析が13秒。十分に速い。この程度あれば10基線程度の補正データ生成も数10ms以下で処理できる。サーバをちゃんと組めば1000ユーザ程度の補正データ配信も余裕でこなせると思う。玄箱等を使えばもっと安く上がるが速度の余裕が無いのと環境整備に時間がかかる。実はシリアルI/Fが省略されているのが痛い。Linuxで使えるUSB-シリアルアダプタを探さないといけない。 |
.....................................................................................................................................
RTKLIB ver.1.1完。とりあえず次のステップに行く前の整理。次はver.2.0の予定だがネットワークRTK用の大幅な修正/拡張が入る。でも色々と検討事項がありちょっとコーディングは止まったまま。
合同大会プログラム決定。こちらも少しピッチを上げてネタを作らねば。
・タイトル(日本語) : 時間・空間補間した基準局網観測値によるキネマティックGPS性能の評価
・講演セッション : D106 測地学一般
・講演形態 : オーラル
・講演日時 : 05月23日 11:15 - 05月23日 11:30
.....................................................................................................................................
安価な無線通信技術と精密測位技術を組み合わせた応用を少し考えてみる。
分かりやすい応用でGPS芝刈機というのはどうだろう。実は海洋大に行くと多分昔研究に使ったと思われるエンジン式芝刈機が転がっているのだが、単独測位では精度が低くあまり実用的では無かったと思う。m以上ずれたら刈り残しが大量に出てしまう。これを安価なネットワークRTKを使って自動運転させれば、ゴルフ場の人件費削減に大きく役立つのではないだろうか。この例に限らず屋外の工事、農業、林業等の作業に、cm級の精密測位を使って制御した自動機械を導入することにより大幅な省力化がはかれそうである。これは測位機器価格\数10万、運用コスト\数1000円/月くらいになれば結構需要がありそうな気がする。
.....................................................................................................................................
RTKLIBの衛星-受信機間の幾何学距離を求めるルーチンを以下の様なiterationで書いているのであるが、ある方から解析的に解ける、とご指摘を受けて良く見ると確かにただの2次方程式なのでiterationは必要ない。色々と考えているつもりでも考えが及んでない点が多いなあと反省(元々sin, cosの入る形から効率化のため近似を入れる様に書き換えたという経緯もある)。もちろん以下が間違いというわけでは全然ないのであるが、少しだけ効率が悪い。(学生さんへの宿題。以下関数をiteration無しでほぼ同一解を求めるように書き換えよ)
(補足: 後から確認したら単独測位のGauss-Newton途中解で電波伝搬時間が明示的に求まり、その値を使えば直接地球回転角を求められるのでここでのiterationは必要ないとの趣旨だった様。ご指摘はもっともなのだがその方法だと受信機時計誤差を明示的に求める必要があり、相対測位の基準局側の様に必ずしも受信機時計誤差を求める必要のないケースでも単独測位計算が必要になり少し効率が悪い。解としては殆ど差は出ないので結局どちらでも良いように思う。3/29追記)
extern double geodist(const double *rs, const double *rr, double *e)
{
int i,j;
double r,rk,rot;
if (norm(rs,3)<RE) return -1.0;
e[2]=rs[2]-rr[2];
for (i=0,r=2E7,rk=0.0;i<10;i++,rk=r) {
rot=-OMGE*r/CLIGHT;
e[0]=rs[0]-rs[1]*rot-rr[0]; /* e=Rz(-OMGE*r/C)*rs-rr */
e[1]=rs[0]*rot+rs[1]-rr[1];
r=norm(e,3);
if (fabs(r-rk)<1E-4) {for (j=0;j<3;j++) e[j]/=r; return r;}
}
return -1.0;
}
3月末に定額無線データ通信サービスがやっとイー・モバイルで始まる。ただまだサービスエリアが狭いし速度が出るのかもよく分からない。無線データ通信は今後どんなサービスが現れるのか技術的にもビジネス的にも大変興味深い分野である。5年後を考えると定額高速通信は当たり前になっている可能性が高い。それらの技術と精密測位を組み合わせると結構面白い応用が考えられる様に思うのだが。
.....................................................................................................................................
GNSS 2007 Abstruct Verification, The Institute of Navigation
ION GNSS 2007の受領アブスト一覧がupdateされている。良く知った名前も散見するし、もの凄い数の登録ではある。
多分Eulerの"Novel Concept in Multiple
GNSS Network RTK Processing"は内容がぶつかるのではと思う。Odijkの"Two
Approaches to Precise Kinematic GPS Positioning
with Miniaturized L1 Receivers"は内容が楽しみ。
.....................................................................................................................................
申告書類を税務署に送る。今年から定率減税額が半分に減らされていることに気付く。知らない中に増税。増税はいいが税金使って整備したものはちゃんと国民に返すべき。ということで再度書いておく。国土地理院は電子基準点の1Hz観測データをちゃんと無料公開すべきだと思う。
.....................................................................................................................................
毎年恒例の確定申告。昨年はやたら本を買った年だった気がする。当然技術書は全部必要経費で落とす訳であるが、ちょっと収支バランスが悪い。
.....................................................................................................................................
清水の舞台を飛び降りる心境で某2周波GPS受信機発注。多分3年程度で償却できると思うのだがどうなることやら。さて、すっきりしたのでプログラム開発に注力せねば。
Amazonで届いた参考書。
E.D.Kaplan et al.(ed), Understanding GPS Principles and Applications,
Second Edition, Artech House, 2005
1996年に出た参考書の第2版。1版は主に受信機技術に詳しいが航法アルゴリズム等はぱっとしないという印象があった。新しいだけ有って最近の話題、例えばINS
integration、AGPS、Galileo等が増補されている。GPS/GNSSマーケットや応用に触れた章があるのが技術書としては珍しい。10人以上のその道の専門家が各章を書いているので内容が濃い。ざっと面白そうな所を読んで新しく覚えた用語。CRPA
(FRPA) antenna、MS-based A-GPS、Hadamard
Variance etc。
R.Prasad et al., Applied Satellite Navigation Using GPS, GALILEO,
and Augmentation Systems, Artech House, 2005
mobile communcations seriesの中の1巻とあってGPS/GNSSの移動体応用技術が主体。SBAS,
Galileoや無線通信網との融合等。今やろうとしていることにちょうどマッチしていて興味深い。
.....................................................................................................................................
確定申告に向け書類整理。後は中基線+ネットワークRTK対応RTKLIB改修。
.....................................................................................................................................
Internet Week 2005 チュートリアル, WIDE School of Internet
2005/12に実施されたインターネットに関するチュートリアル。リアルビデオによるビデオ講義が見られる。ネットワークRTK絡みで無線通信技術に興味が出てきたので「#29
インターネットに近づく携帯網と無線技術~IP技術者から見たその裏側と仕掛け~」を見てしまった。約3H、長くて疲れたが、携帯網の仕組みや無線通信技術動向等、手っ取り早く概要を掴むには良い。ただネットワーク専門家向けなので内容は高度。略語が分からないのでGoogleやWikipediaで検索しながら聞く。これを聞くと2010年には4G携帯で通信帯域など気にする必要はなくなりそう。5年10年後を考えると通信量を減らす工夫より将来の通信手段にどれだけ融合しやすいアーキテクチャなのかが最も重要な気がしてきた。ところでもうすぐ日本版E911が3G携帯で運用開始されるが、これには単なるGPSではなくAGPS(Assisted
GPS)が使われる。これは航法メッセージをAGPSサーバでデコードしてSMS(Short
Message Service)で携帯に送ることによりGPS初期捕捉時間(TTFF)短縮を行う。
J.LaMance et al., Assisted GPS: A Low-Infrastructure Approach, GPS World, 2002
AGPSの解説が有ったので張っておく。今はAGPSにDGPSは載っていない様だが当然拡張としては考えられる。将来的には携帯基地局にネットワークRTK基準局をおいて全ての携帯でcm精度のRTK測位ができるようになるかもしれない。RTKは
(補助手段の使い易い) カーナビよりは実はマンナビに向いている。ただ2周波GPS/GNSS受信機が携帯に内蔵できるよう数千円以下になる日がホントに来るのだろうか。
.....................................................................................................................................
色々実験やプログラム開発に必要なので、某2周波GPS受信機の価格を問い合わせたのだが、RTKをつけないRaw出力でもまだ結構良いお値段がする。でも1周波受信機と1桁以上差があるのはその内容を考えるとやはり納得し難い。さてどうしようか。
.....................................................................................................................................
新しいネットワークRTKシステムの提案は最終的に基準局 数千以上、ユーザ 数百万以上を狙っている。もちろんこれは現在の2周波受信機価格を見れば笑止千万なわけであるが、これはあと十年でL2CやL5が普及すれば劇的に下がる可能性が高い。RTKの一般利用にはそれ以外の課題も多いがその潜在需要を考えると今技術開発に力を入れる価値はあると考えている。まあ、動くものを作らないと誰も本気にしないのでまずはそこから。
河口, インターネットGNSS基準局ネットワークの構築, WIDE Technical-Report, 2006
これを読むと日本でも独自のネットワークRTKシステム開発を進めている研究も有るようだ。素晴らしい。
.....................................................................................................................................
昨日申し込んだアブストを読み返してみると稚拙な英語が改めて恥ずかしい。内容はネットワークRTKを少しかじった研究者ならすぐに考えつきそうなネタではある。ただ実装はそんなに容易ではない。最低ARを含んだRTKや電離層/対流圏推定が出来て通信プログラミングにも精通していないとプログラムは組めない。あと半年で本当に動くところまで行くのだろうか。これも今ならleicaのSpiderNETを組み合わせると近いことができるはずであるが、自前で何とかすることに意味はある。
W.R.スティーヴンス, UNIXネットワークプログラミング 第2版, ピアソン・エデュケーション, 2000
通信 (ソケット) プログラミングに関する名著。緻密で詳細な解説。以前お世話になった。多分今回も色々と参照することになる。
戸辺他, インターネットを基盤とした高度衛星測位環境, 信学技報, 2004
浪江他, インターネット回線を補正データ伝送に利用したGPS測位, 全国測量技術大会, 2003
ちょっと"Internet based rtk"で検索しただけで大量の論文が引っかかるので、誰でも考えつきそうなネタ過ぎたかなと反省。でもその多くが測位/補正手法ではなく単に通信手法の提案/評価になっているのは残念。その点少しはオリジナリティが出せるかなという気もする。ところで最初の論文にあるIBASのVRS拡張はどうなっているのだろう。
.....................................................................................................................................
今年から来年度一杯かけてやるつもりの研究テーマの一環。ION GNSS 2007申込。海洋大研究員として発表予定。これも内容は見切り発車。目途が無いわけでは無いが本当に成果が出るかはよく分からない。IONは結構落とされると聞いているのでまずは採択される必要がある。事前paperもいるはず。あとパスポートが切れているので9月までに取り直さなければならない。
T.Takasu et al., Internet-Based Network-RTK with Self-Distributed Reference Stations - Concepts and Prototype, (submitted to) ION GNSS 2007
.....................................................................................................................................
昨日紹介したGPS受信機は1周波受信機での (ネットワーク)
RTK実験のため購入したのだが、仕様を良く読むと
"half-cycle ambiguity resolved"
なphaseを出力するとある。当然1/2波長のARは1波長に比較し条件が悪い。これは何とかならないのだろうか。
.....................................................................................................................................
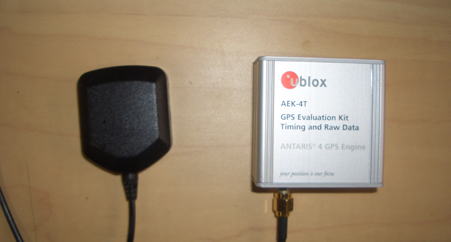
U-BLOXのAEK-4TというGPS受信機が届いたので車の背にアンテナをくっつけて雨の中を少しドライブ。この受信機、OEMモジュールの評価キットだがUSBバスパワーで動作し10HzRAW (code+phase) 出力できる優れもの (1式$349+送料+消費税)。u-centerと呼ぶPC用サポートAPも大変良くできている。SBAS enableでデータを取ったらPRN129, 137 (MSAS) 以外にPRN134が入る。調べたらハワイ上空に位置するWAASらしい。これはさすがに日本で補正情報は使えないのだろうな。
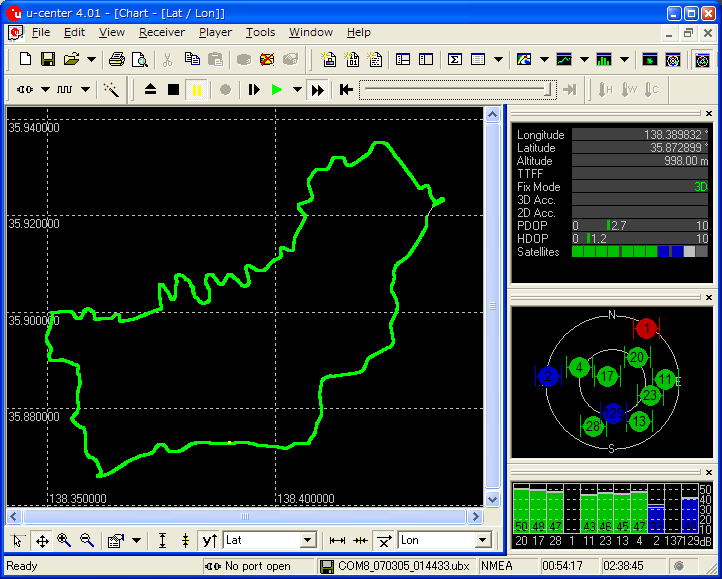
UBLOX+MSAS DGPS単独測位 (訂正3/30) による軌跡。回りにビルは皆無、障害物は樹木くらいで上空視界は良い。北東の途切れている部分は清里駅近くのトンネル。拡大してみるとスムーズな軌跡だが、停止点でも結構ドリフトがあるので絶対座標がそんなに信用できる訳ではない。何らかのフィルタが入っている可能性が高い。
.....................................................................................................................................
2007/03/04
GPS Visualizer
GPS測位結果 (トラック、ウエイポイント) を地図画像やGoogle
Map, Google Earthファイルに変換してくれるというWebサイト。
そのうちRINEXをアップロードすると後処理キネマティック解析結果を返してくれるというWeb頁をRTKLIB使って作ろうかと思っている
(スタティックやPPPはあるが多分相対測位キネマティックは世界中でもまだ無いはず)。できれば自前サーバを立てたいところだが、田舎で回線が未だにADSLなのが少し厳しい。早く光がこないか、とずーっと思っているのだが。
.....................................................................................................................................
測地学会誌最新号届く。昨年9月に開催された「測地・地殻変動に関する研究集会」講演原稿特集号(第1部)。大変充実した内容。その中から。
太田他, PPPキネマティックGPSの長期安定性評価, 測地学会誌, 第52巻第4号, 2006
GIPSYによるPPPキネマティック解析時系列安定性評価。衛星時計の解への影響、長期解での異常値原因解析、長周期地震計への適用性評価等を行っている。30s間隔1年分の誤差グラフにキネマティックPPPの不安定性が現れており、課題が見える。できれば相対測位解との比較が見たかった。
最近ネットワークRTKの技術サーベイをやっていて、将来的にはリアルタイムPPPと広域ネットワークRTKは融合するだろうとの感を強くしている。すなわち現在の精密暦時計で衛星間整数Ambiguityを維持する推定手法になっていないのが、PPPでARを困難にしている本質的な理由なので、原理的にはここを何とかすればARを加えたリアルタイムPPPは可能になる。そして実はこれはネットワークRTKを地球規模に拡大したものと一致する。もちろん実現には技術課題は多数有って目途があるのかも分からない。ただこれは長期での開発課題だと思っている。
.....................................................................................................................................
Windows Vista環境で色々と作業。spamメールフィルタが改善されているのでこれだけで移行する意味はあると思うが、動かないH/Wが有ったり画面回転を有効にするとAeroが無効になったりやはりまだH/Wの対応が悪い、ということで移行は当分先という結論。
.....................................................................................................................................
| Home | by T.Takasu |
{kind=link}
{kind=link}
{kind=link}
{kind=link}