
|
擔婰丒旛峫榐 |
2005 | 2006 | 2007/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2008 |
| November | December 2007 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
January | Home |
.....................................................................................................................................
偝偰崱擭傕崱擔偱偍廔偄丅
崱擭傪怳傝曉偭偰傒傞偲堦擭偦傟傎偳戝夁側偔岲偒側偙偲傪傗偭偰偙傟偨擭偩偭偨偲偼尵偊傞偲巚偆丅尋媶柺偱偼巚偭偨傛偆偵惉壥偑弌側偐偭偨婥傕偡傞偑丄抧摴側搘椡偑偦偺偆偪椙偄寢壥偲側偭偰尰傟傞偙偲傪婩偭偰偄傑偡丅奆條傛偄偍擭傪丅
.....................................................................................................................................
僾儘僌儔儉僠儏乕僯儞僌傗僐儞僷僀儖僆僾僔儑儞偺愝掕偵傛傝丄Armadillo忋偱偺rtklib偺幚峴偼1僄億僢僋1.5s埵傑偱偼崅懍壔偱偒偨丅屻偼傗偼傝soft-float偐MaverickCrunch偺桳岠壔偟偐側偄偺偱偙傟偼嵟掅尷gcc傗libc偺嶌傝捈偟偑昁梫偱傕偆彮偟帪娫偑偐偐傞偩傠偆丅
偟偐偟崅懍壔偺偨傔偵偼僾儘僼傽僀儖傪偪傖傫偲庢傜側偗傟偽偄偗側偄偲捝姶丅僾儘僼傽僀儖傪庢傟偽惈擻僱僢僋偑壗張偵偁傞偐堦栚椖慠丅(曗懌: Linux偱偼僗僞僢僋僆乕僶僼儘乕椺奜偺僆乕僶僿僢僪偑寢峔戝偒偄偙偲傪敪尒丅偪傚偭偲戝偒偄儘乕僇儖攝楍偼malloc偱妋曐偟偨傎偆偑椙偄丅12/31捛婰)
偝偰擭枛偱嶨帠偑棴傑偭偰偄傞偺偱傂偲傑偢嶌嬈偼拞抐丅
.....................................................................................................................................
Debian Wiki, ARM EABI Port
ARM偺晜摦彫悢揰墘嶼傪崅懍壔偡傞EABI:Embedded Application Binary Interface偲屇傇ABI丅偙傟偺幚憰偵偼Kernel傪2.6.18埲崀偵忋偘傞昁梫偑偁傞偟僇乕僱儖偩偗偱側偔慡偰偺儔僀僽儔儕傗僶僀僫儕傪嶌傝捈偡昁梫偑偁傞丅傑偩stable偱傕柍偄傛偆偩偟扤偐偑偪傖傫偲億乕僥傿儞僌偟偰偔傟傞偺傪懸偮偟偐側偄偺偐側偁丄偲敿暘偁偒傜傔儌乕僪丅偟偐偟怴偟偄偙偲傪傗傠偆偲偡傞偲壗帠傕偡傫側傝偲偼偄偐傫側偁丅(偲傝偁偊偢soft-float偱傕10攞偔傜偄偼懍偔側傞傛偆側偺偱傕偆彮偟婃挘偭偰傒傞偐)
.....................................................................................................................................
慻傒崬傒Linux偼寢峔柺敀偄丅USB儊儌儕傕昗弨偱僒億乕僩偝傟偰偄傞偺偱慡偔僾儘僌儔儉傪彂偐側偄偱傕
cat /dev/ttyACM0 > ublox.log
偲傗傞偩偗偱娙堈儘僈乕偵側傞丅偨偩彮偟徚旓揹椡偑尩偟偄丅Armadillo-220丄ublox AEK-4P丄1G USB儊儌儕丄USB柍慄LAN (Planex GW-US54GXS) 傪巊偭偰娙堈儘僈乕傪摦偐偟偰丄5V 1800mAh偺Li僶僢僥儕 (JTT Mobile Battery Slim) 偱1帪娫40暘偟偐帩偨側偐偭偨丅僨乕僞傪RAM偵僶僢僼傽儕儞僌偟偰USB儊儌儕傊偺曐懚昿搙傪壓偘傟偽傕偆彮偟壱摥帪娫偼墑偽偣傞偐傕偟傟側偄丅(USB儊儌儕偺彂偒崬傒傪巭傔偨傜壱摥帪娫偼2帪娫15暘偵側偭偨丅寢峔USB儊儌儕偼揹椡傪怘偭偰偄傞條偩)
rtklib_2.1傪僋儘僗娐嫬偱僐儞僷僀儖偟偰Armadillo偱幚峴偟幚峴帪娫傪應傞丅rnx2rtkp偺抁婎慄擇廃攇KGPS應埵丅30s娫妘24H暘2880僄億僢僋丅
Armadillo-220 (ARM9 200MHz) : 17800s (6.18s/epoch)
(Linux2.6+gcc4.1.2)
PC (C2Q Q6600 2.4GHz) : 14s (0.0049s/epoch) (Win XP+VMWare+Linux2.6+gcc4.1.2)
PC (C2Q Q6600 2.4GHz) : 20s (0.0069s/epoch) (Win XP+Cygwin+gcc 3.4.4)
Armadillo偺抣偼搑拞傑偱偺寁應偵傛傞梊應抣丅側偍BLAS/LAPACK偼巊偭偰偄側偄丅戝懱PC偺1000攞嫮幚峴帪娫偑偐偐偭偰偍傝憡摉抶偄丅PC偺1/100掱搙偺惈擻偼偁傞偩傠偆偲梊應偟偰偄偨偺偩偑丅Armadillo偱巊偭偰偄傞ARM9偵偼堦墳晜摦彫悢揰婡峔偑晅偄偰偄傞傜偟偄偺偩偑丄尰峴僨傿僗僩儕價儏乕僔儑儞偱偼巊傢傟偰偄側偄條偩丅廬偭偰晜摦彫悢揰墘嶼偼儔僀僽儔儕僄儈儏儗乕僔儑儞偱偁傝丄偙偙偱10攞埲忋抶偔側偭偰偄傞偼偢丅偙偺惈擻偱偼RTK-GPS偵偼慡慠巊偊側偄丅傕偭偲僠儏乕僯儞僌偺昁梫偑偁傞丅偁偲PC偱傕1僄億僢僋5ms傕偐偐偭偰偄傞偺偼彮偟抶偡偓傞偺偱偙傟傕挷嵏偡傞昁梫偑偁傞丅
彮偟ARM偺晜摦彫悢揰墘嶼偵偮偄偰挷傋偨丅
(1) Armadillo偺奐敪娐嫬偱偼hard-float側僆僽僕僃僋僩
(偡側傢偪FPU柦椷傪杽傔崬傫偩僆僽僕僃僋僩)
傪惗惉偡傞丅hard-float僆僽僕僃僋僩偱偼FPU偑側偄応崌椺奜偑敪惗偡傞偺偱FPU柦椷枅偵僇乕僱儖僄儈儏儗乕僔儑儞偵傛傝柦椷幚峴偝傟傞丅偙傟偼僆乕僶僿僢僪偑戝偒偄
(曗懌: 椺奜敪惗偡傞偲僐儞僥僉僗僩僗僀僢僠偑婲偙傝僉儍僢僔儏傕僼儔僢僔儏偝傟傞偺偱傑偲傕側惈擻偼弌側偄丅寢嬊尰峴偺懡偔偺ARM
Linux僨傿僩儕價儏乕僔儑儞偱偼晜摦彫悢揰墘嶼傪懡梡偡傞AP偼傑偲傕偵摦偐側偄偲偄偆偙偲丅12/28捛婰)
(2) 僐儞僷僀儔愝掕偱soft-float (偡側傢偪FPU柦椷傪僐儞僷僀儔偑儔僀僽儔儕屇傃弌偟傑偨偼惍悢墘嶼柦椷偵曄姺)
側僆僽僕僃僋僩傪惗惉偡傞偙偲傕偱偒傞 (FPU側偟偺応崌偙偺曽偑懍偄)
偑丄偙偺応崌libc傪娷傔巊偭偰偄傞儔僀僽儔儕傪慡偰soft-float偱嶌傝捈偡昁梫偑偁傞丅偙傟偼憡摉偵戝曄偦偆丅
(3) Armadillo-2x0偱巊偭偰偄傞ARM9儀乕僗偺CPU
EP93僔儕乕僘偵偼MaverickCrunch偲屇傇FPU懳墳僐僾儘僙僢僒偑搵嵹偝傟偰偄傞偑丄傑偩尰峴gcc偑偪傖傫偲懳墳偟偰偄側偄傜偟偄丅
偳偆傕FPU偺僇乕僱儖僄儈儏儗乕僔儑儞偼抶偡偓傞條偱soft-float偵斾妑偟偰傕10-20攞帪娫偑偐偐傞條偩(嶲峫)丅RTK-GPS偺応崌懡暘幚峴帪娫偺90%埲忋偑晜摦彫悢揰墘嶼側偺偱偪傚偭偲幚梡偵側傜側偄丅偙傟偼側傫偲偐側傜側偄偩傠偆偐丅
.....................................................................................................................................
Reuters, Russia launches final satellites for its
own GPS, Dec 25, 2007
2007/12/25 19:32UTC, 3婡偺GLONASS塹惎丄儘僔傾僇僓僼僗僞儞偺僶僀僐僰乕儖塅拡僙儞僞偐傜懪偪忋偘惉岟丅婰帠偱偼"峲朄僔僗僥儉姰惉偺偨傔嵟屻偺3婡"偲彂偄偰偄傞偺偩偗偳丄FOC24婡偵偼側傜側偄偺偱傑偩姰惉偵偼帪娫偑偐偐傞偺偱偼偲巚偆丅偄偢傟偵偟偰傕GLONASS偑幚梡揑偵巊偊傞條偵側傝偮偮偁傞偺偱棃擭偵側偭偨傜彮偟杮奿揑偵GLONASS偺棙梡偵庢傝慻傫偱傒偨偄丅
.....................................................................................................................................
妎彂丅Armadillo-220偱偺ublox偲柍慄LAN (Planex GW-US54GXS) USB僪儔僀僶偺僀儞僗僩乕儖朄丅
(1) ublox
丂(a) 奐敪娐嫬偱make menu config丅Kernel/Library/Default
Selection-Customize Kernel Settings傪ON丅
丂(b) Linux Kernel Configuration - Device
Drivers - USB support - USB Modem (CDC ACM)
support傪ON丅
丂(c) atmark-dist-20071214/vendors/AtmarkTechno/Armadillo-220.Base/ext2_devtable.txt偵埲壓峴傪捛壛丅
丂/dev/ttyACM c 666 0 0 166 0 0 1 2
丂(d) make all偟偰kernel偲romfs傪嶌傝捈偟丅
(2) 柍慄LAN (Planex GW-US54GXS)
丂(a) linux-1.26.12.3-a9-13/drivers/usb/net/zd1211_driver/zdusb.c
67峴偵埲壓峴傪捛壛丅(儀儞僟ID/僾儘僟僋僩ID捛壛)
丂{USB_DEVICE(0x2019,0x5303)},
丂(b) inux-1.26.12.3-a9-13/drivers/usb/net/zd1211_driver/Makefile
8峴傪埲壓偵曄峏丅
丂ZD1211REV_B=1
丂(c) 奐敪娐嫬偱make menu config丅Kernel/Library/Default
Selection-Customize Kernel Settings, Customize
Vendor/User Settings傪ON丅
丂(d) Linux Kernel Configuration - Device
Drivers - USB support - USB Network Adapters
- USB ZD1211 based Wireless device Support傪ON丅
丂(e) Userland Configuration - Network Application
- wireless_tools suport, iwconfig傪ON丅
丂(f) make all 偟偰kernel偲romfs傪嶌傝捈偟丅
側傫偺偙偲偼側偄丄Linux2.6偱偼椉曽偲傕婛偵僪儔僀僶偑僒億乕僩偝傟偰偄傞偺偱偦傟傪桳岠偵偟偰僇乕僱儖傪嶌傝捈偣偽傛偄丅偨偩彮偟僜乕僗傪捈偡昁梫偑偁傞丅側偍ublox偼斈梡USB僔儕傾儖僨僶僀僗 (CDC ACM) 偲偟偰擣幆偝傟丄僨僶僀僗柤偼/dev/ttyACM0丅傑偨柍慄LAN愝掕偼儐乕僥傿儕僥傿iwconfig傪巊偆丅偟偐偟慻傒崬傒Linux偼怓乆偲惂栺偑偁偭偰晛捠偺Linux偲巊偄彑庤偼悘暘偲堘偆丅偱傕傗偭偲彮偟條巕偑暘偐偭偰偒偨偺偱偙傟偐傜偼嶌嬈偑恑傓偩傠偆丅
.....................................................................................................................................
偪傚偭偲傗傝偨偄偙偲偑偁偭偰慻傒崬傒Linux僇乕僪armadillo-220傪峸擖丅ARM9 200MHz丄RAM32MB丄Flash RAM 8MB+256MB丄USB儂僗僩丄LAN丄僔儕傾儖I/O亊3丄僷儔儗儖I/O亊16bit丄偱柤巋埲壓僒僀僘丅Linux偑僾儕僀儞僗僩乕儖偝傟偰偄傞偺偱揹尮偲僔儕傾儖抂枛傪偮側偘偽偡偖Linux儅僔儞偲偟偰棙梡偱偒傞丅偝偰傑偢偼ublox偲柍慄LAN傪USB偱宷偓偨偄偺偱丄偪傚偭偲僪儔僀僶傪彂偐側偗傟偽偄偗側偄丅
.....................................................................................................................................
Spaceflight Now, Final Delta launch of 2007 lofts new GPS satellite, 20 December, 2007
2007/12/20 20:04UTC丄GPS 2R-18塹惎丄暷崙僼儘儕僟廈働乕僾僇僫儀儔儖偐傜Delta2儘働僢僩偱懪忋偘惉岟丅Delta2偼79夞楢懕偺懪忋偘惉岟偱1989擭偺搊応偐傜134夞拞132夞偺惉岟偲偺偙偲丅偙傟偱婳摴忋偺Block IIR-M塹惎偼5婡栚丅師偺懪忋偘偼棃擭3寧拞弡偵6婡栚偺Block IIR-M傪梊掕丅(曗懌; 塹惎斣崋偼SVN57/PRN29偱丄僗儘僢僩C1偵搳擖偝傟傞柾條丅12/25捛婰)
.....................................................................................................................................
ublox偺AEK-4T庴怣婡偺MSAS曗惓偑巪偔摥偐側偄審偵偮偄偰埲慜壗搙偐彂偄偨偑丄尰嵼ublox japan幮偐傜夵廋F/W斉AEK-4T傪偍庁傝偟偰彮偟昡壙偟偰偄傞丅偦偺寢壥傪婰榐偺偨傔彮偟揬偭偰偍偔丅
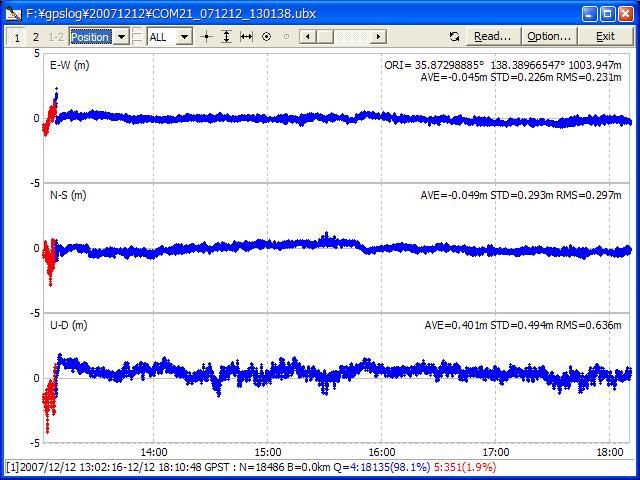
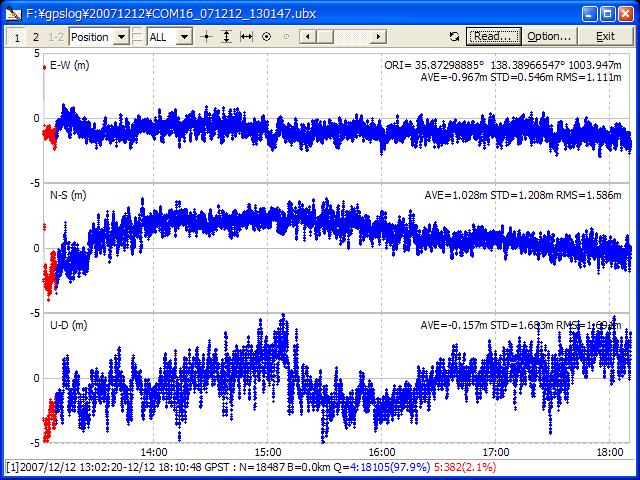
傑偢屌掕揰應埵丅壆崻偺忋偺傾儞僥僫(NovAtel GPS-702-GG) 偲2暘婒僗僾儕僢僞宱桼偱怴F/W斉AEK-4T偲媽F/W斉AEK-4T傪宷偄偱應埵丅1Hz 栺5H暘丅NMEA夝偺婎慄夝斾妑岆嵎丄嵍: 怴F/W丄塃: 媽F/W丅嶲峫偺偨傔RAW+RTLIB-MSAS-DGPS夝丅
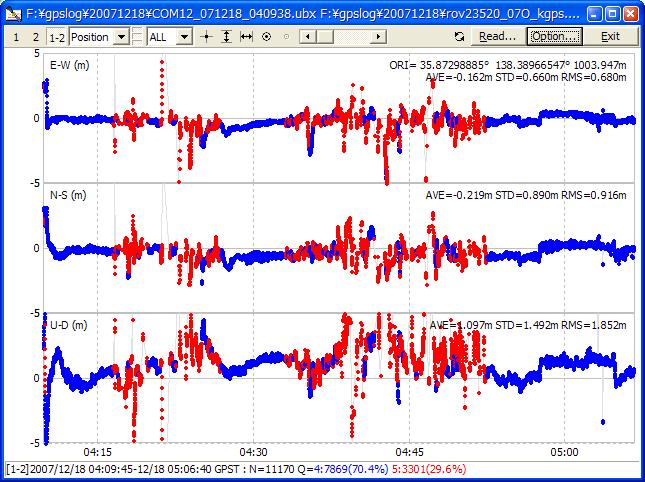
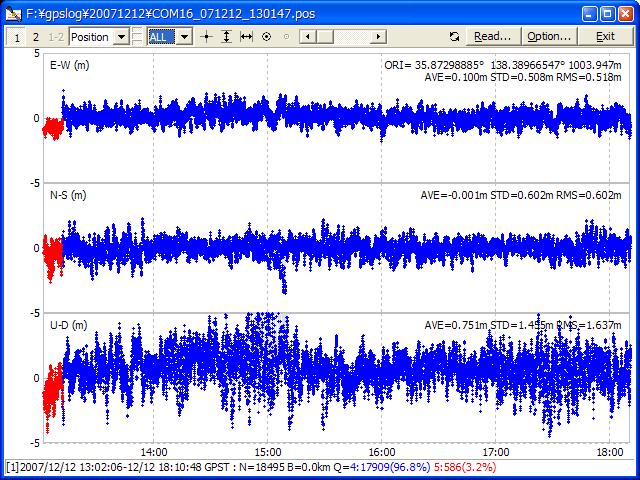
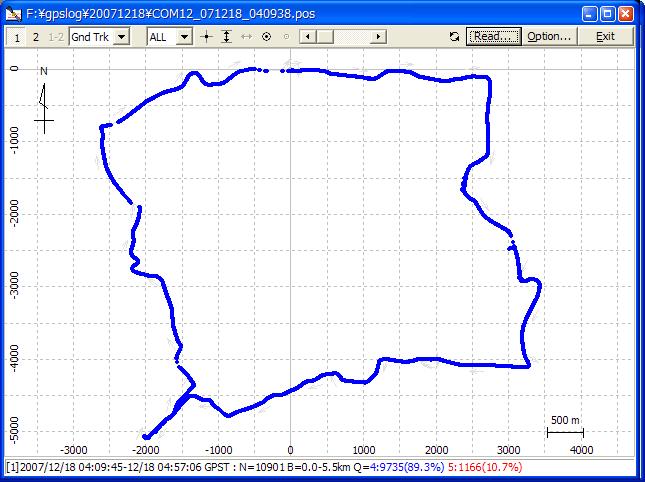
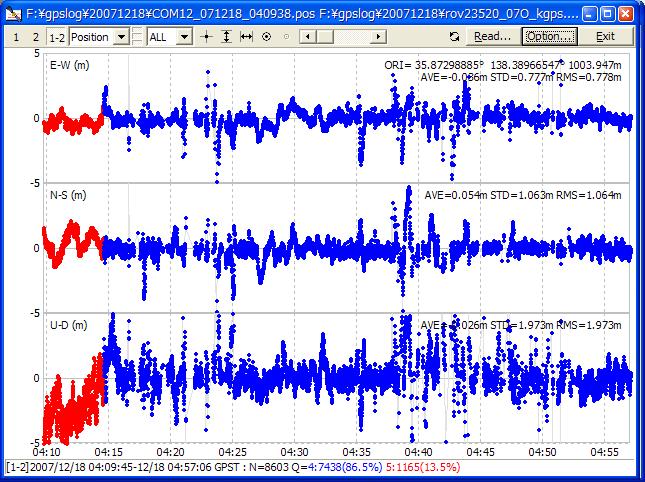
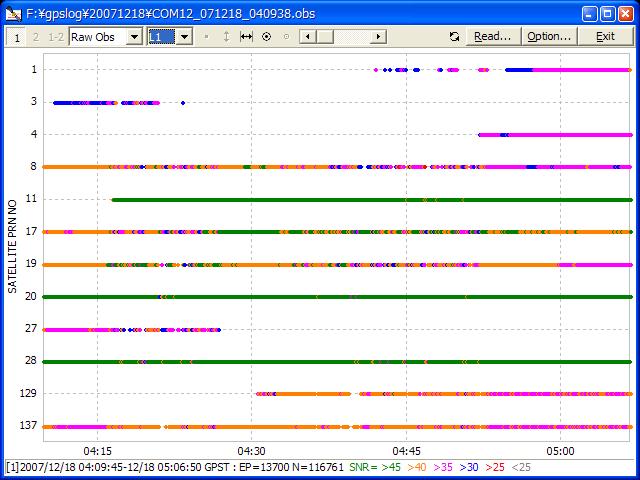
師偵堏摦懱應埵丅帺摦幵儖乕僼偵NovAtel GPS-702-GG傪愝抲偟2暘婒僗僾儕僢僞宱桼偱怴F/W AEK-4T偲NovAtel OEM-V傪愙懕丅壠偺夞傝傪40暘傎偳僪儔僀僽丅嵍: NMEA夝婳愓丄塃: NMEA夝應埵岆嵎 (NovAtel KGPS-FIX夝斾妑)丅嶲峫偺偨傔RAW+RTKLIB-MSAS-DGPS夝婳愓丄岆嵎丅惗僨乕僞庢摼忬嫷丅側偍僌儔僼拞惵偑DGPS(MSAS)夝丄愒偑扨撈應埵夝傪帵偟偰偄傞丅傑偨KGPS-FIX夝偑摼傜傟側偄嬫娫偼惛搙昡壙弌棃側偄偺偱惛搙偼忦審偑椙偄嬫娫偺傒偺寢壥偱偁傞偙偲傕拲堄丅

偝偰丄怴F/W偱偼媽F/W偵偁偭偨栤戣揰偼惀惓偝傟偰偄傞偲峫偊傜傟傞丅
屌掕揰應埵寢壥偵偮偄偰偼旕忢偵椙偄丄偲偄偆偐椙偡偓傞丅僼傿儖僞偼嵟傕娚偄愝掕偵偟偰偁傞偺偩偑僗儉乕僕儞僌偺偣偄偐儅儖僠僷僗偑旕忢偵椙偔梷惂偝傟悅捈RMS岆嵎偑1m傪愗偭偰偄傞丅巊偭偰偄傞傾儞僥僫偼應検媺偱偁傞偑偙傟偼DGPS愱梡庴怣婡偵旵揋偡傞惛搙偲峫偊傜傟傞丅
堏摦懱應埵偵娭偟偰偼MSAS曗惓偑桳岠偵側傜側偄嬫娫偑懡偄丅MSAS偼庴偐偭偰偄傞偺偱偙傟偵娭偟偰偼傑偩F/W偺夵椙偑昁梫偲巚傢傟傞丅偨偩媽F/W偺MSAS儘僗僩屻偺嵞曔懆偵旕忢偵
(悢暘乣悢10暘) 帪娫偑偐偐傞栤戣揰偼怴F/W偱偼尒傜傟側偐偭偨丅
偄偢傟偵偟偰傕F/W偝偊婃挘傟偽MSAS偼旕忢偵桳岠偵摥偔偲偄偆偙偲偱偁傝丄懠儊乕僇偺庴怣婡F/W傕婃挘偭偰梸偟偄偲偙傠偱偁傞丅
.....................................................................................................................................
ION GNSS 2007偺proceeding偑傗偭偲岞奐偝傟偨偺偱柺敀偦偆側傕偺傪彮偟撉傓丅
D.Odijk et al., Two Approaches to Precise Kinematic GPS Positioning
with Miniaturized L1 Receivers, ION GNSS 2007
掅壙奿堦廃攇庴怣婡偵傛傞惛枾應埵惈擻昡壙丅捠忢偺RTK偵壛偊偰"time-differences"傪巊偭偨"time
relative method"傪採埬偟偰偄傞丅庴怣婡偲偟偰ublox
TIM-LL/LP偲Septentrio AsteRx1傪巊偭偰幚昡壙偟偰偄傞丅岞墍偺妸傝戜偺忋偵婎弨嬊丄roundabout
(儊儕乕僑乕儔儞僪)忋偵儘乕僶庴怣婡傪抲偒丄夞揮偝偣偰應埵惛搙傪應偭偰偄傞偺偑柺敀偄丅愄RTK-GPS偺惛搙昡壙梡偵僕僃僢僩僐乕僗僞乕傪巊偭偰婳愓嵞尰惈傪應傠偆偐偲巚偭偰偄偨偺偩偑偙傟偼傕偭偲娙扨丅寢榑偑偁傫傑傝傛偔暘偐傜側偄偺偩偑丄傗偭傁傝掅壙奿堦廃攇庴怣婡偱偼怓乆岺晇偟偰傕側偐側偐幚梡揑側惈擻偼弌側偄側偁丄偲尵偭偨偲偙傠偐丅
.....................................................................................................................................
TIOBE Programing Community Index
悽奅偱嵟傕億僺儏儔乕側僾儘僌儔儉尵岅偼壗偐丄偲偄偆儕僗僩丅専嶕僄儞僕儞偺僸僢僩悢偱儔儞僋傪寛傔偰偄傞傜偟偄丅偙偙偺偲偙傠Java偑偢偭偲埨掕偟偨恖婥傪曐偭偰偄傞偺偼儂儞僩偐偹偲偄偆婥偼偡傞丅嵟嬤偺恖婥忋徃慻偼PHP丄C#丄Ruby偲偄偭偨偲偙傠偐丅Matlab傕廰偔23埵偵擖偭偰偄傞丅偝偰偪傚偭偲偱傕僾儘僌儔儉傪彂偄偨偙偲偑偁傞尵岅傪忋偘偰偄偔偲Java丄C丄Basic丄C++丄Perl丄JavaScript丄Pascal丄Fortran丄Matlab丄Ada丄Awk丄Bash丄Csh丄偱崱傑偱彂偄偨僐乕僪検偼丄C偑僟儞僩僣偱丄懕偄偰C++丄Matlab丄Bash
(sh)偺弴偐側偁丅崱屻傗偭偰傒偨偄尵岅偼Ruby丄C#丄岲偒側尵岅偼幚偼Awk傗sh偩偭偨傝偡傞丅偟偐偟悽偺拞偵偼怓乆側僾儘僌儔儉尵岅偑偁傞傕偺偩丅
.....................................................................................................................................
Robot Watch, 戞2夞GPS儘儃僢僩僇乕妛惗僐儞僥僗僩奐嵜 乣GPS偺應埵僨乕僞偱儘儃僢僩傪惂屼!, 2007/12/4
愭擔偺GPS僔儞億帪偵峴傢傟偨GPS儘儃僢僩僇乕僐儞僥僗僩偺徻嵶側儗億乕僩偑忋偑偭偰偄傞丅偪傚偆偳GPS偺儘儃僢僩墳梡偵嫽枴偑弌偰偒偰嵟弶偐傜嵟屻傑偱尒妛偟偰偄偨偺偩偑寢峔柺敀偐偭偨丅棃擭偼崙嵺戝夛偵側傞傜偟偄偺偱偤傂傑偨戲嶳偺嶲壛幰偑僄儞僩儕偟偰惙傝忋偑偭偰偔傟傞偙偲傪婅偆丅
.....................................................................................................................................
NewScientist, China's satellite navigation plans threasten
Galileo, November 8 2006
偪傚偭偲屆偄婰帠偩偑拞崙偺Compass/Beidou娭楢僯儏乕僗傪揬偭偰偍偔丅偙傟偵傛傞偲Beidou偼孯梡怣崋偵壛偊偰2008擭偐傜10m惛搙偺"open"僒乕價僗傪奐巒偡傞偲偁傞丅傑偩媄弍巇條偑偪傖傫偲岞奐偝傟偰偄傞栿偱偼側偄偟惈擻傗怣棅惈傕傛偔暘偐傜側偄偺偱拞崙埲奜偱杮摉偵巊傢傟傞傛偆偵側傞偐偼晄柧偱偁傞偑丄GPS怣崋屳姺惈偑崅偔庴怣婡僼傽乕儉僂僃傾夵廋掱搙偱嵪傓偺偱偁傟偽崱屻棙梡偑恑傓壜擻惈偼偁傞丅open僒乕價僗偵娭偟偰偼拞崙
偲偦偺嬤椬崙偑懳徾偲偁傞丅MEO塹惎偵偮偄偰偼慡悽奅偱巊偊傞偺偱偼側偄偐偲巚偆偑丄傕偟偐偡傞偲拞崙嬤椬埲奜偱偼怣崋傪弌偝側偄偁傞偄偼惛搙偑棊偪傞摍偺惂栺偑偁傞偺偐傕偟傟側偄丅
.....................................................................................................................................
AFP BBNews, EU, GPS偺懳峈攏乽僈儕儗僆寁夋乿偵24壄儐乕儘偺梊嶼彸擣, 2007/11/26
AFP BBNews, 乽僈儕儗僆寁夋乿丄EU偑慡夛堦抳偱幚峴偵崌堄, 2007/12/01
崱擭5寧偵帒嬥偺審偼寛拝偑偮偄偰偄偨偺偐偲巚偭偰偄偨傜偳偆傕崱傑偱潌傔偰偄偨傜偟偄丅傗偭偲僾儘僕僃僋僩宲懕偑杮寛傑傝偵側偭偨條偩丅偱傕摉弶偺2008擭塣梡奐巒梊掕偑2013擭偵偢傟崬傓條偩偟偙偺愭傑偩傑偩攇棎偑偁傞偐傕偟傟側偄丅
.....................................................................................................................................
| Home | by T.Takasu |
{kind=link}
{kind=link}
{kind=link}
{kind=link}