{kind=link}
●:FIX,●:FLOAT, 測位解: rov20427.zip (439KB), Google Earth: rov20427.kmz (445KB)
基準局 : 電子基準点 中道(940048) 30sサンプリング+時間補間
観測データRINEX : rov2116a.zip (7.0MB), ublox DGPS解 kmz : ubx20427.kmz (375KB) (追加 4/28)
|
日記・備考録 |
2006 | 2007/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2008 |
| March | April 2007 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 |
May | Home |
....................................................................................................................................
やっと電離層推定が大体うまく働く様になってきた。固定点80km基線の後処理キネマティックで水平1.5cm, 垂直4cm(RMS), FIX率95%は出ているが、パラメータをかなりチューニングしないといけない。あとIGS点と電子基準点との基線だとアンテナモデルを入れても上下のオフセットが10cm近く出る (座標はそれぞれITRF2000とF2解を使用)。これはF2解のオフセットか標高差に伴う対流圏モデル誤差の影響か。結構微妙。実は固定点でも絶対座標をcm精度できっちり検証するのはそんなに簡単ではない。
....................................................................................................................................
世の中は連休らしいのだがそんな気分は全然ない。
昨日の観測データと、同時に取ったublox MSAS-DGPS解のKMZファイルも公開。観測データにはローバ分しか含まれていない。ubloxは高感度とフィルタのおかげでNovAtelで取れていない区間でもちゃんと解が得られていることが分かる。
なお以降解析結果の公開は自粛。興味の有る方は5/23の発表をお聞き下さい。
....................................................................................................................................
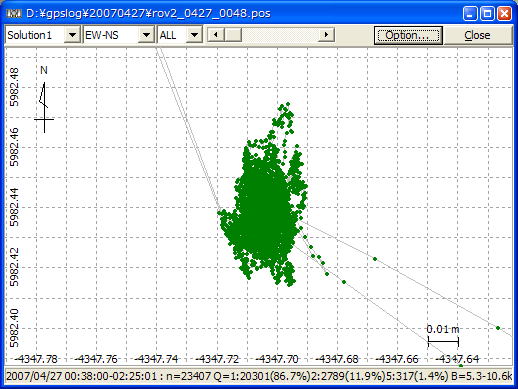
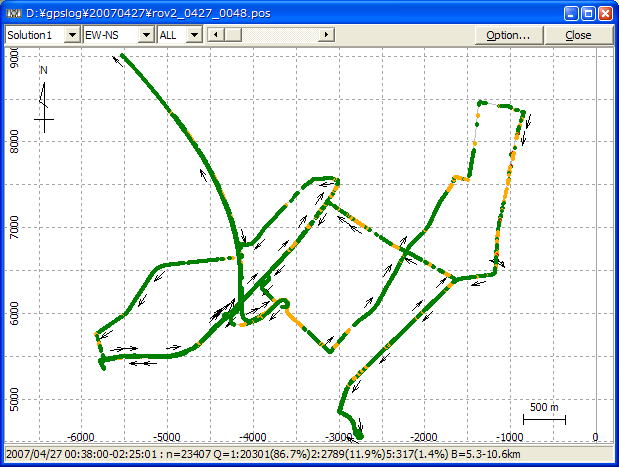
甲府市街走行データのキネマティック解。基準局は近隣電子基準点の30sサンプリングデータ。やはりビル街や裏通りの測位条件はかなり悪い。まだ1Hz点による衛星時計変動補正は入っていない。やはり30sの補間だと停止点のスポットが1Hzに比較し随分とぶれる。でも水平3cmの精度は出ている様に見える
(停止点拡大図)。
●:FIX,●:FLOAT, 測位解: rov20427.zip (439KB), Google Earth: rov20427.kmz (445KB)
基準局 : 電子基準点 中道(940048) 30sサンプリング+時間補間
観測データRINEX : rov2116a.zip (7.0MB), ublox DGPS解 kmz : ubx20427.kmz (375KB) (追加 4/28)
....................................................................................................................................
RTK-GPS測位の基礎とプログラミング
昨年度東京海洋大の研究室ゼミで行ったRTK-GPSの基礎理論とそのプログラミングに関する講義資料集をup。内容につきご指摘、不明点等有ればお知らせ下さい。(追記: ゼミの中で開発したRTKGPSライブラリであるRTKLIBのマニュアルと精度評価結果もup。19:30)
第172回 地震予知連絡会資料, 2007/4/9 (PDF
7.1MB)
GT0.6.3のキネマティックPPPを使って解析して頂いた能登半島地震による地殻変動が含まれている。地震前後の欠測もあるし変動が綺麗に捉えられているわけではない。少しGPSでは厳しい条件かも知れない。これくらい(6H)の時間幅だとウネウネする見かけ上数cmの変動が目立ってとっても気持ち悪い。これはなんとかしたいとずっと思ってはいるのだが。
....................................................................................................................................
5月発表に向けRTKLIBの大幅改造。でも何故か電離層推定があまりうまく働かない。見落としている点はないか確認中。実は、電離層推定を入れなくてもちょっとある(あまり正統的でない)対策を加えると30km基線くらいまでは、今のプログラムのままでも実用になるかもしれない。でも、電離層遅延の基線長依存性については少し長期のデータで統計解析をしなればいけないだろうとは思っている。
....................................................................................................................................
やっと概ね想定した通りの性能が出るようになった。移動体は4/11に取った4Hzデータ。重要な点は基準点として近隣電子基準点の30sサンプリングデータを時間補間して使っていること
(追記: 正確には補間ではないのだが分かりやすい表現にしている。興味の有る方は5/23の発表をお聞き下さい。18:17)。すなわちタダで使える電子基準点データを使って、移動体のキネマティック解析が可能になる。
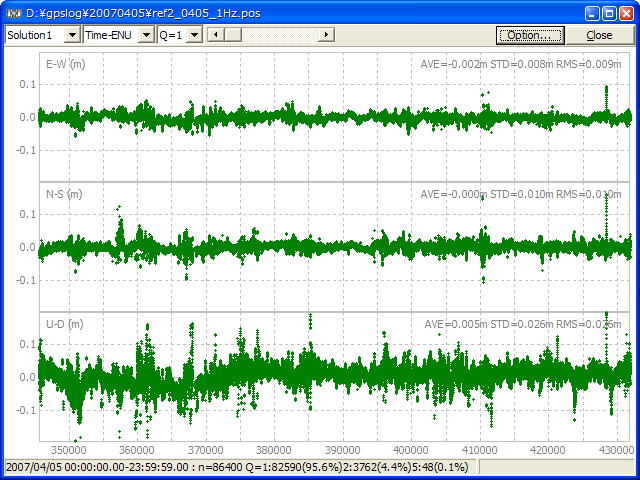
定点1Hzキネマティックでも水平1cm, 垂直3cm (RMS), FIX率95% (追記: グラフ追加。18:33) は出ているが、やはり少し衛星時計補間誤差の影響が出る。後はIGS
1Hz点を使ってこの変動補正を行う。まあとりあえず最低限の発表ネタは確保。

●:FIX,●:FLOAT, 基準局 : 電子基準点 小淵沢(950263) 30sサンプリング+時間補間
....................................................................................................................................
サクラに雪なんてこちらに越してきて始めて。でもこれはこれで風流なものではある。

....................................................................................................................................
昨日、一昨日upした自動車走行データのRINEXファイルをup。大量のデータをあえてupするのはどなたか市販基線解析ソフトでの結果を送って下さる方がいらっしゃらないかと思ってのこと。
(RTKLIBの評価・改良のためTrimble TTC, GrafNavやRTDの結果と比較してみたいと思っているので、基線解析ソフトの結果を送っていただけると大変有り難いです。なお基準局座標:
35.872988847, 138.389665429, 1003.8228。アンテナ:
NovAtel GPS-702-GG。基準局座標は近隣電子基準点との24H
Static測位解。電子基準点座標はF2解。ただしPCV補正は入っていません。)
....................................................................................................................................
ちょっと韮崎のノジマまで買い物に行ってきたついでにまたデータを取ってきた。10Hzサンプリング。RTKLIB
ver.1.2bキネマティック解。中央高速 小淵沢IC→韮崎IC区間の走行を含んでいる。やはり基線長が10kmを越えるととたんにFIX率が落ちる。まだ電離層推定が入っていないのでこんなものだろう。この走行データで近隣電子基準点30sデータ+近隣IGS
1Hzデータを仮想基準点に使って100%近いFIX率まで持っていければ一応目標達成なのだがどうなるか。
ところで近隣IGS 1Hz点はUSUDを使おうと思っていたのだがsite photoを見ると近くに巨大なパラボラがあってその方位の衛星可視条件があまり良くない様だ。多分南方向だと思うのだがGoogle
Mapでは高解像度の写真がなく状況がよく分からない。臼田局は1時間くらいなのでちょっと偵察に行って来ようかと思っている。
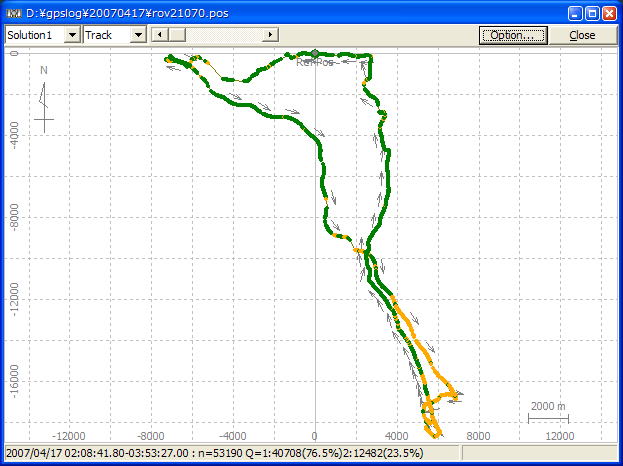
●:FIX,●:FLOAT, 測位解: rov20417.zip (746KB), Google Earth: rov20417.kmz (1.26MB)
観測データRINEX : rov21070.zip (37.4MB) (追加 4/18)
.....................................................................................................................................
こないだ取った高速道路走行のRTKLIB ver.1.2b キネマティック解を記録のためupしておく。4Hzサンプリング。中央高速 小淵沢IC→長坂ICを含んだ周回路。途中で八ヶ岳PAで少し休憩を取っている。基線長は8km以下なので高速道路上の軌跡は割と綺麗に取れている。高速道路で解が途切れているのは主に陸橋の下をくぐった所。段々とデータ取得要領が分かってきたので、できれば次に市街地走行データを取りたいのだが、これは基準局を市街地近くに設置し最低数時間はバッテリで動く環境を作らなければいけない。5月の発表に間に合うかは微妙。なお、KMLポイントデータには時刻タグを付加している。

●:FIX,●:FLOAT, 測位解: rov20411.zip (153KB), Google Earth: rov20411.kmz (250KB) (条件変更差し替え,4/18)
観測データRINEX : rov21010.zip (6.8MB) (追加 4/18)
...........................................................
後藤, GPS観測による精密軌道決定, 計測自動制御学会先端電子計測部会講演会,
2007 (PDF 6.4MB)
NICT後藤氏がGPSによる衛星の精密軌道決定について最近発表されている資料を見つけた。衛星の精密軌道決定はマイナーな分野で日本では地道にやっている人は少ないのだが、測位だけでなく地球の精密計測においても基盤となる技術なので貴重な研究だと思う。
.....................................................................................................................................
IGS局のGoogle Mapも作ってみた。GPS Week 1408 SINEXに座標が含まれている局のみ。全246局。IGSの座標系はITRF2005 (厳密にはIGS05)。やはり結構Google Map座標とは差がある様だ。でも上空から見てみると色々と発見があって面白い。
IGS STATIONS MAP (試験公開)
.....................................................................................................................................
ちょっとGoogle Map APIの試験用に作った頁。電子基準点地図。マーカーをクリックするとその点に地図中心が移動して詳細情報を表示する。座標は2007/1/1の国土地理院F2解を変換して出力している。Google
Mapの座標系はWGS84なので差は数cm以下のはずだが航空写真との比較で数m以上のずれのある点もある。これはGoogle
Mapの座標精度がその程度だと考えて良いと思う。(少し色んな基準点を見ているのだが航空写真と地図が数10mずれている地点も多いし、特にGoogle
Mapの航空写真の位置精度はあまり良くない様だ)
日本全部を表示すると相当に重たい。Google Mapは所謂Ajaxの一例だがブラウザの性能がもっと上がらないと複雑で実用的なAPは厳しいのではとは思う。日本語コードをUTF-8に統一しないと文字化けするのでそれを処置するのに少し時間がかかってしまった。(文字コードの変換は特別な変換tツールを使わなくても、IEでテキストを開いて、コード指定をして保存すればOK。Webで日本語を使うのは色々と面倒な点が多い。)
GEONET STATIONS MAP (試験公開)
.....................................................................................................................................
日本地球惑星科学連合2007年大会 : セッションD106
測地学一般, 2007/5/22-23, 幕張メッセ
未だネタが全然出来ていないのだがどうしよう。回りを見ると皆アカデミックな内容で明らかに場違いな気もする。あと1月半、今年は多分連休は休めなさそうである。
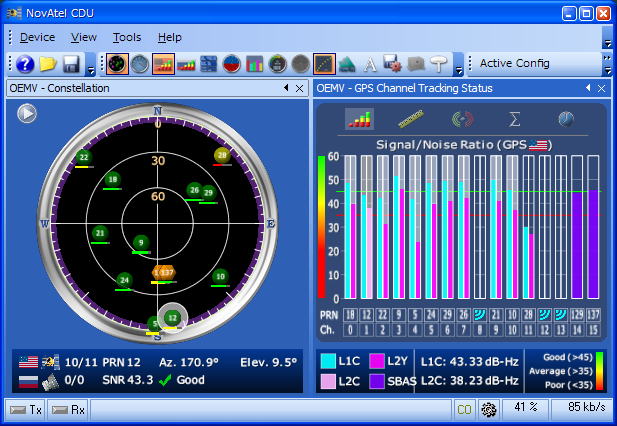
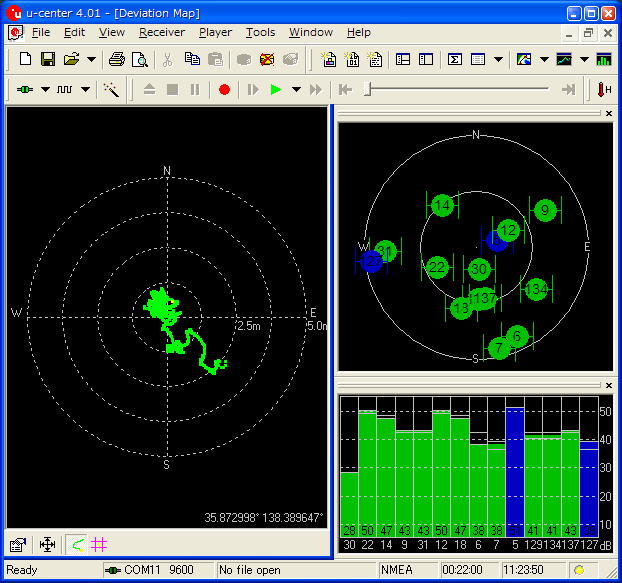
NovAtel OEMV-3のコマンドで
> forcegpsl2code auto
を設定し、L2コード選択を"自動"にするとL2Cが入る
(デフォルト設定では入らない)。PRN12受信レベルの薄桃色がL2C。下のようにL2Y(濃桃)はL1に比較し概ね10dB近く受信レベルが落ちる場合が多いが、L2Cは5dB位で落ちが少ない。これは特に低仰角や移動体では有利になると思う。
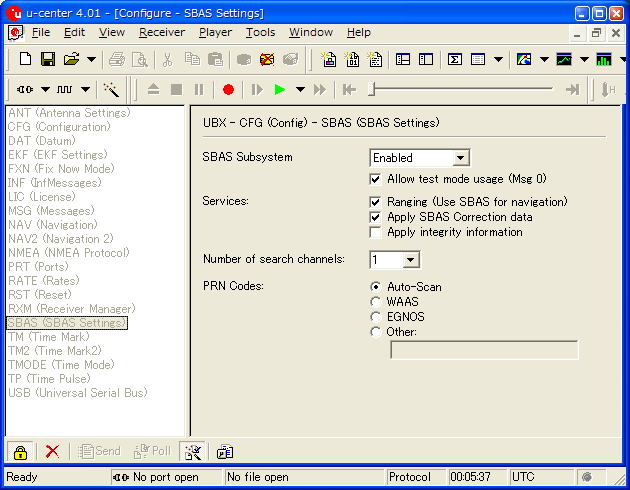
ついでに覚え書き。SBAS試験信号の補正情報を有効にするコマンド。(Type
0メッセージをType2メッセージに読み替えて受信)
>> sbascontrol enable auto 0 zerototwo
以上を入力するとSolution type がSingleからWAASに切り替わるのでDGPSが有効になっているようだ。
.....................................................................................................................................
4/1にupしたキネマティック解のkmzファイルをGoogle Earthのドライブルートツアー機能を使って再生すると軌跡がガクガクと上下振動してしまう問題発見。どうも <LineString>に <altitudeMode>absolute</altitudeMode>タグをつけると発生するらしい。多分これはGoogle Earthのバグだと思う (ver.4.0.2737)。ということでガクガクしないkmzファイルに差し替え。Google Earthは確かに凄いソフトなのだが、安定してない点も多いようでまだβといった雰囲気が漂ってはいる。(なおドライブルートツアーを実行するにはGoogle Earthでkmzファイルを開き、"Rover Track"を選択して下側のツアー実行ボタンを押して下さい)
.....................................................................................................................................
東京に出たついでに秋葉原に寄ってSMA-TNC同軸変換アダプタを探す。千石の近くの無線機屋で1個\1,200也。少し高いが急いでいたので買う。久しぶりに秋葉原駅に降りたのだが駅前が全く様変わりしているのに驚いた。萌えコスチュームのおねーちゃんがビラ配っているし...。でも、ラジオデパートは30年前と全然変わっていないのだよなあ。屋根の上のNovAtelアンテナにubloxを繋ぐ。同軸変換アダプタはこのため。なんとPRN127が西の地平線近くに入る。SBASが4衛星入るのでこれでGPSが無くなっても測位はできる (相当にDOPは悪いが)。
さてSBASのPRN割り当てを調べてみると
・WAAS : PRN134 (Inmarsat POR), PRN122 (Inmarsat
AOR-W))
・EGNOS : PRN120 (Inmarsat AOR-E), PRN131
(Inmarsat IOR)
・MSAS : PRN129 and 137 (MTSAT 1-R and 2)
ということで、PRN127の情報が見つからないのだが、これは位置からするとどうもインドのGAGAN (GSAT-4) の可能性が高い。この記事では2006/12打上予定となっているので既に上がって試験を行っているのかもしれない。さて静止位置が82Eと書かれているのでGTのコマンドを使って方位・仰角を計算してみよう。
>> satazel(geodtoecef([0,82,35786000]),geodtoecef([35.87,138.39,1002]))*180/pi
ans = -111.249686218052 18.4106522534994
どうも方位・仰角が少し合わない気がする。もしかするとまだ規定静止位置まで移動中なのかもしれない。
.....................................................................................................................................
アンテナ設置用拡張ポールが届いたので屋根の上に上げているRTK基準局アンテナを30cm程上に移動。評価用に、現在連続して観測データを取得しているのだが、明らかに単独測位のばらつきが少なくなった気がする。これで概ね仰角5度以上の衛星がほぼスリップなしに捕捉できる様になった。ただNovAtel CDUと呼ぶPC用サポートAPの安定性が良くない。すぐに例外を起こす。これは早くLinux基準局サーバS/Wを整備してそちらに移行したい。
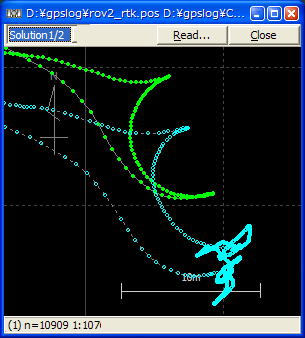
3/31に取った移動体データの解析結果をちょっと紹介。左は清里の森の駐車場で10分ほど停止して出発した時の軌跡 (基線長7.0km) 。緑がNovAtel-RTKLIBキネマティック解(全てFIX解)。水色がubloxのDGPS解。ubloxは絶対座標が数m以上ずれているのと停止点でのドリフトが大きい。右はキネマティック解の停止点拡大図。停止点でのドリフトが殆どなく、概ね1cm以下の(相対)精度が出ていることが分かる。

.....................................................................................................................................
一昨日とったデータの条件を変えた解析結果一覧。ForwardとInstantaneous ARはRTKと同等の条件。Instantaneous ARはエポック毎に独立にAR (Single-Epoch AR)。CombinedはForward+Backwardの結合解。測位解が得られていないエポックは可視衛星数が3以下のところ。
| Elevation Mask | # of Epochs | # of Solutions | # of Fixed Solutions (Fix Rate=Fixed/Solutions) | ||
|---|---|---|---|---|---|
| Forward | Instantaneous AR | Combined | |||
| 10 deg | 12242 | 11092 | 8006 (72.2%) | 7485 (67.5%) | 9678 (87.3%) |
| 15 deg | 12242 | 11007 | 9299 (84.5%) | 8639 (78.5%) | 10533 (95.7%) |
| 20 deg | 12242 | 10930 | 9806 (89.7%) | 9782 (89.5%) | 10721 (98.1%) |
| 25 deg | 12242 | 10909 | 9825 (90.1%) | 10266 (94.1%) | 10761 (98.6%) |
| 30 deg | 12242 | 10775 | 9585 (89.0%) | 9798 (90.9%) | 10506 (97.5%) |
仰角マスク25度で結果が最も良くなるということはアンテナの取り付け方法に改善の余地がある。これは今後少し評価したい。上空視界の良いエリアでは、ほぼ電子基準点に近い瞬時FIX率が得られている。これは受信機やアンテナ性能が良いせいだと思う。ただ障害物が多いエリアでublox並にもう少し衛星が捕捉できると良いのだが。受信機メーカには移動体RTK用に高感度2周波受信機の開発をお願いしたい。(当面、条件の悪いエリア用に高感度1周波受信機を併用して補助に使うというやり方も考えられる。これはubloxの相対精度の高さを考えると充分実用的かも知れない。)
MSAS試験信号の送信に関するページ, 神戸航空衛星センター, 国土交通省, 2007/4/2
更新されていたので正式運用か、と思ったら「平成18年度末頃になる予定です」が「平成19年度早期に開始予定です」に書き換わっているだけだった。正式運用になったら色々と評価しようと思っているのだがまだ時間がかかるのだろうか。GPS使っている人は皆待ちこがれているので早く正式運用になって欲しい。ところで神戸航空衛星センターについて書いた記事を見つけた。13mのお皿3枚。MTSAT-1Rのメイン局はこちら。MTSAT2のメイン管制局は常陸太田航空衛星センターらしい。
.....................................................................................................................................
昨日とったデータのL1のみの後処理キネマティック解 (RTKLIB kinematic+L1+combined解) FIX率 NovAtel: 27.8%、ublox: 16.0%。さすがにL1のみでのRTKは厳しいかもしれない。ただNovAtelのL1/L2 FIX解と比較してみると、ubloxのL1-kinematic解は明らかにMSAS-DGPS解より良い様に見える。頑張れば低価格1周波受信機のRTKで10cm精度が出るかも知れない。これはもう少しちゃんと評価する予定。
......................
参考のため昨日取った移動体の後処理キネマティック測位解をupしておく
。なお基準局座標を電子基準点を使ってちゃんと決め直したので昨日より少しFIX率が落ちている (95.7% 98.6%)。あと部分FIXを有効にし1つでもFIXすればFIXとしているのでFIX解でも精度のかなり悪いものも一部含まれている。従って解精度は同時出力している標準偏差を参考にして下さい。条件等は以下の通り。その他解析条件は測位解ヘッダ参照下さい。
・測位解 : rov2_rtk.zip (テキスト), rov2_rtk.kmz (Google Earth KML)
・後処理基線解析ソフト : RNX2RTKP (RTKLIB ver.1.1)
・ローバ/基準局受信機/アンテナ : NovAtel OEMV-3,
GPS-702-GG
・測位周期 : 4Hz
・解析時間 : 38秒 (WinXP, C2D 2.4GHz)
(追記: 仰角マスクを25度にするとFIX率が向上することが分かったので、その条件の測位解に差し替えた。22:47)
(追記: Google Earth ドライブルートツアー実行時に上下振動してしまう問題対応のためkmzファイル差し替え。4/7)
(観測データRINEX: rov20900.zip 10.2MB。興味のある方は手持ちの基線解析ソフトで解析して比較してみてください。結果をお知らせいただけると今後の研究に参考になり大変有り難いです。)
......................
移動体の観測データを見ていると条件の悪い時間帯でもMSASは大体受かっている。日本ではMSASは南方仰角50度位で常に見えるのでこの測位信号も移動体では使った方が良いだろう。そろそろMSASも正式運用だしこの辺も研究テーマにはなる。ところでSBASのephemerisフォーマットや計算方法は何処にあるのだろう。
......................
ublox MSAS-DGPS解もup。条件は以下の通り。なおNovAtelとはアンテナ位置が進行方向後ろ30cm程離れている。NovAtelで測位出来ていない区間でも測位出来ている点が多いがこれは高感度, MSAS測位信号, ublox航法アルゴリズムの全部が影響していると思う。ubloxは解が所々抜けている。これは測位解と生観測値を4Hzで同時出力しているので通信処理か演算処理が間に合っていない可能性がある。
・測位解 : ubx_dgps.zip (NMEA), ubx_dgps.kmz (Google Earth KML)
・受信機/アンテナ : ublox AEK-4T, ANN-MS-0-005
(付属小型パッチアンテナ)
・DGPS : MSAS-DGPS試験信号 (設定)
・測位周期 : 4Hz
ubloxの観測データRINEXもup: ubx20900.zip 1.3MB。ubloxログファイルをant2rin.exeで変換した。D.Milbertさん有り難う御座いました。なおRINEXにMSASは含まれていない。(21:51追加)
.....................................................................................................................................
| Home | by T.Takasu |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}