測位解: rov2_0273_1510_07.zip (755KB), Google Earth: rov2_0273_1510_07.kmz (970KB)
(基準局: 電子基準点 0273 塩尻+0046 大町+0263 小淵沢+IGS USUD 1Hz補正)
観測データRINEX : rov21510.zip (13.8MB)
|
日記・備考録 |
2006 | 2007/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2008 |
| April | May 2007 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
June | Home |
....................................................................................................................................
昨日の速度/加速度グラフを見ていると予想したとおり垂直と水平方向の挙動は全く違う。これからRTKLIBに運動モデルを入れる予定だがやはり等方なモデルはうまくないのではと思う。
あとSP3対応、リアルタイム通信I/FやRTCM、NTRIPを入れたり、やることはいっぱい残っている。ネットワークRTKの基礎技術の確認は出来たのだが実際に動くところまでの実装はまだまだ時間がかかりそうだ。その前に今時点でのRTKLIBを凍結してきちんとしたリリースにした方がよいかもしれない。
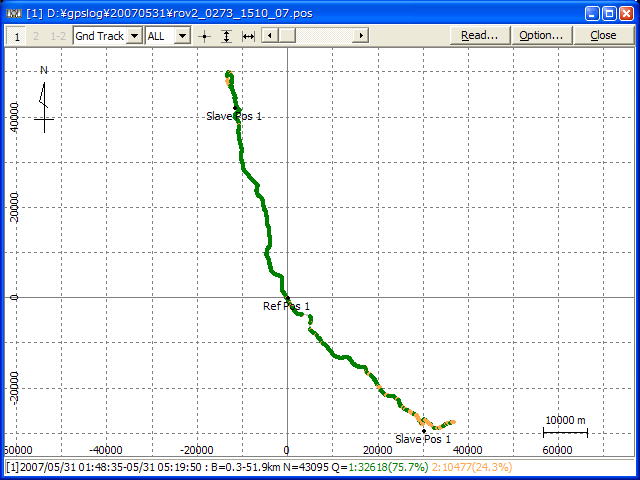
さてさてまたデータを取ってきた。目的は長い軌跡。中央高速に乗って豊科ICで降り、白馬近くまで行って木崎湖をぐるっと回って戻ってきた。今のところバッテリの制約でこれくらいのセッションが限界。なお最近のデータはubloxと比較するため4Hzで取っている。約100kmの軌跡で電子基準点3点のネットワーク補正解。全般に上空視界が良い道が多かったがFIX率が出ていない。今日は大気が不安定で強い雨も降ったのでその影響かもしれない。(補足: 行き帰りほぼ同じ道を通っているのだが、行きのFIX率が悪く、強い雨が降っていた時間帯と一致するので、大気擾乱の影響の可能性が高い) 現在3点の線形補間しか出来ないが4点以上の高次補間を入れるとちょっとだけ性能が上がる可能性もある。
測位解: rov2_0273_1510_07.zip (755KB), Google Earth: rov2_0273_1510_07.kmz (970KB)
(基準局: 電子基準点 0273 塩尻+0046 大町+0263
小淵沢+IGS USUD 1Hz補正)
観測データRINEX : rov21510.zip (13.8MB)
....................................................................................................................................
CDDISが復活したのでIGS USUD 1Hzを入れて昨日取った移動体データの解析。麦草峠越えの八ヶ岳周回コース。目的は山道が多いので自動車の速度/加速度の統計を取る。
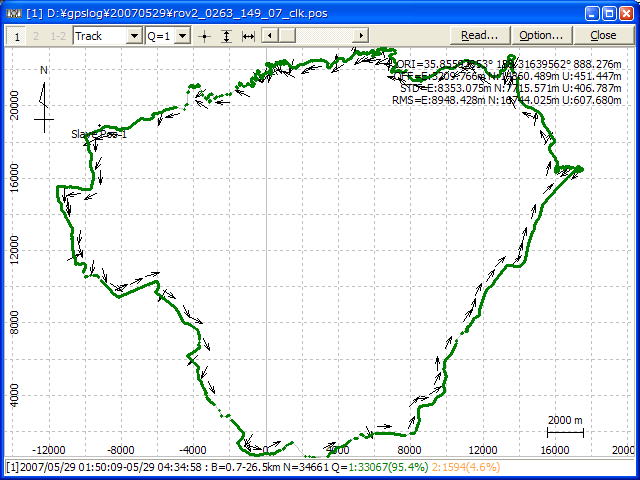
測位解: rov2_0263_149_07_clk.zip (603KB), Google Earth: rov2_0263_149_07_clk.kmz (751KB)
(基準局: 電子基準点 0263 小淵沢+0612 茅野+0613
小海+IGS USUD 1Hz補正)
観測データRINEX: rov2149.zip (9.6MB) (追加 15:05)
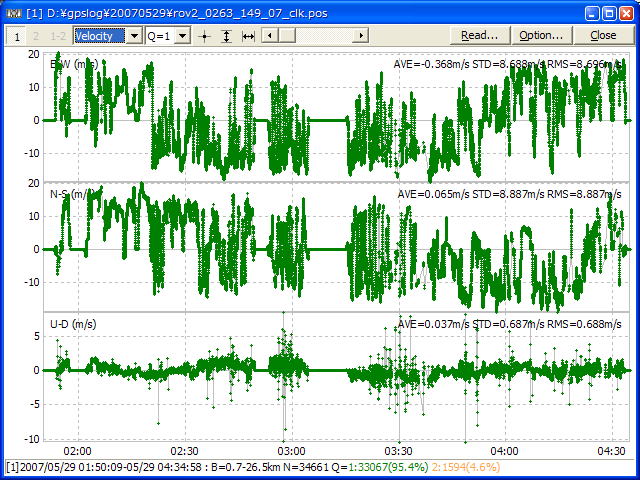
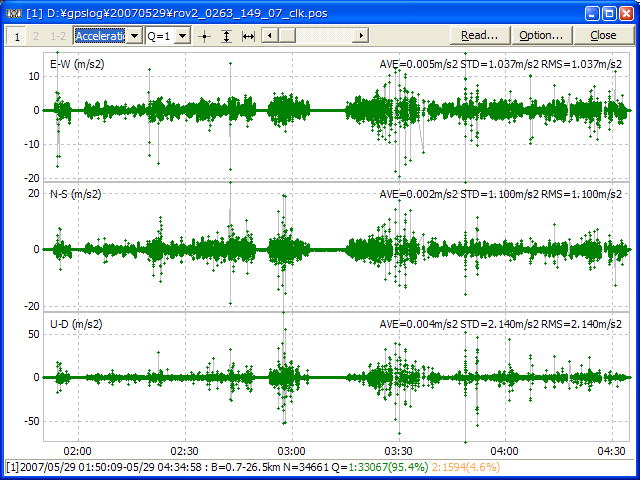
Fix解の1階/2階差分で計算した速度/加速度。上下5G以上を示している点が結構あるが、運転中体が浮き上がったりしている訳ではないので測位誤差かミスFixを拾っているのだろうと思う (ちょっと考えれば分かるように自動車の通常走行では下方向に1Gより大きな加速度がかかることはあり得ない) (補足: F1みたいな大きな空力パーツをつけてダウンフォースが出るようにすれば別)。今後加速度計を載せて比較してみたい。(速度グラフを見て法定速度を越えているなどと野暮なことを言わないように。これは測位誤差だろう) これを見ると速度や加速度の拘束を入れてフィルタをかけるのは自動車では有効な手法かもしれない。
....................................................................................................................................
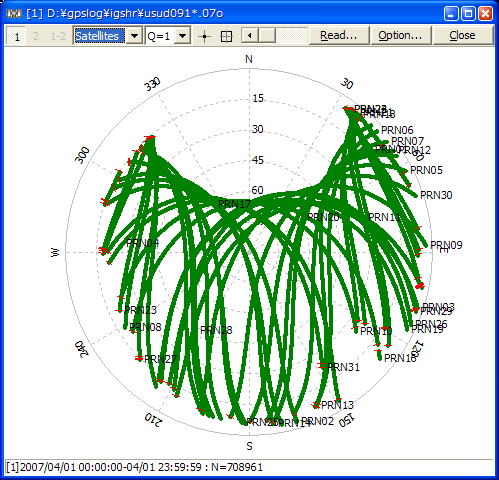
IGS USUD局のスリップ状況。1Hz 24H分。USUDは西方向低仰角のデータが取れていないことがわかる。1Hz時計変動推定には少し条件が悪い。これは64mパラボラの影響であろうか。(補足: 西方向の欠測はパラボラにしては大きすぎるので、多分南東の欠測部分がパラボラの影響で、西方向は地平線(山)に隠れているだけではないかと思う。8:49)
高須他, 低レート基準局網観測データを使った移動体キネマティックGPS測位, 電子情報通信学会 宇宙航行エレクトロニクス研究会(SANE),
2007/7/27
同じネタで申し込んでしまった。今度は原稿を書かなければいけないのでもう少し基礎データを取って内容のあるものにするつもり。原稿締切7/5。
2007/5/29 17:00JST (8:00UTC) 現在、IGS high-rate観測データの5/28-29分がCDDISにupされていない。high-rateデータは通常15分毎のファイルが概ね1H以内にはupされるはずなので、またCDDISのトラブルかもしれない。データを取ってきたので解析しようと思ったが明日に回そう。
....................................................................................................................................
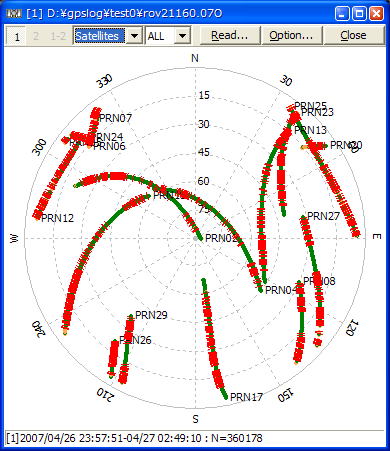
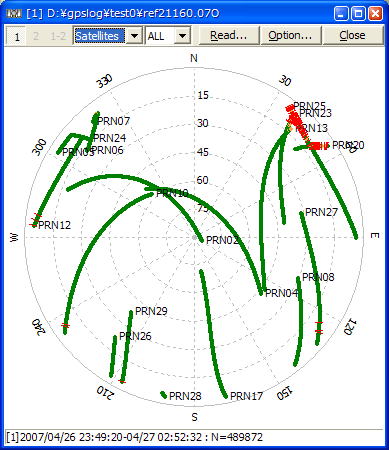
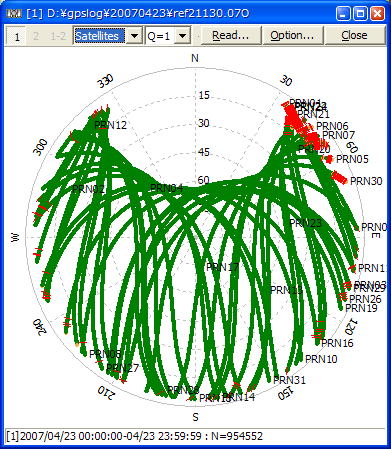
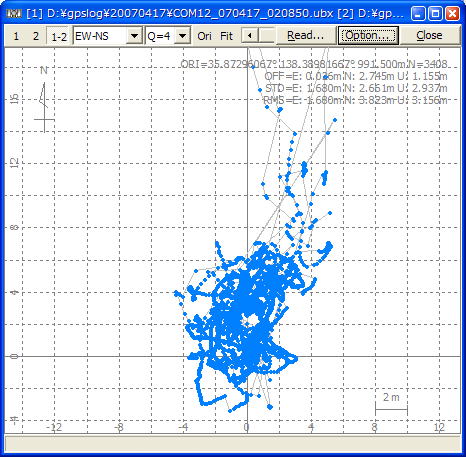
昨日と同じ移動体観測データのスカイプロット(左)。同時に取った基準局データ(右)。基準局の北東15度以下のスリップはアンテナ視界が屋根の縁にかかっているところ。設置場所をもう少し移動させた方が良いかもしれない。(補足: 基準局1Hz 24H分のプロット。北東以外は概ね5度まで綺麗に受かっていることが分かる。5/29)
ION GNSS 2007 Technical Program
9月米国フォートワースで開催されるION GNSS
2007のプログラムがupされている。自分の発表はAlternateになってしまったのですっかり行く気を無くしているのだが、お世話になっている海洋大から幾つか発表が予定されているのが嬉しい。特にD3近藤氏の発表は地味だが大変有用な成果だと思う。頑張って欲しい。
....................................................................................................................................
Matlab 7.4の設定にマルチスレッドオプションがあることに気付いたので切り替えて再ベンチ。7.3 (R2006b) ではこの設定は無いのだが、これを見るとマルチスレッドが有効になっている様だ。
>>bench,a=rand(2000);b=rand(2000);tic;c=a*b;toc,tic;c=inv(a);toc
| LU | FFT | ODE | Sparse | 2-D | 3-D | a*b | inv(a) | version | OS |
|---|---|---|---|---|---|---|---|---|---|
| 0.11 | 0.19 | 0.16 | 0.46 | 0.32 | 0.82 | 1.44 | 2.07 | 7.4 (R2007a) multi-thread=on | Windows XP pro SP2 |
| 0.16 | 0.19 | 0.16 | 0.32 | 0.33 | 0.70 | 2.74 | 3.41 | 7.4 (R2007a) multi-thread=off | Windows XP pro SP2 |
| 0.11 | 0.19 | 0.16 | 0.38 | 0.34 | 0.71 | 1.44 | 2.07 | 7.3 (R2006b) | Windows XP pro SP2 |
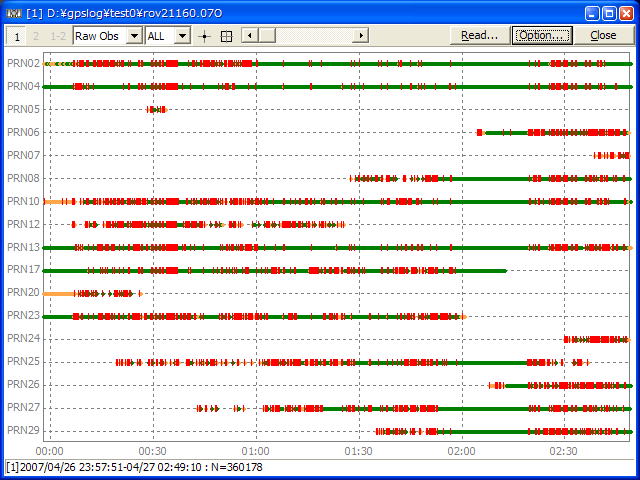
移動体キネマティック解改善のため解析ツールを整備中。4/27移動体観測データのスリップ状況グラフ。赤線がスリップ位置。L1 LLIフラグのみで検出。実はNovAtelの場合L2 LLIも検出に使うとスリップが多くなり過ぎてまともなFix率にならないので、基線解ではL1 LLI+LG Jumpでスリップ検出している。(補足: LG Jumpでは殆どのスリップは捕まえられるので、NovAtelではスリップしていなくてもL2 LLIが立つケースが非常に多いということでもある。もともとLLIを出力しない受信機もあるし、LLIはあまり信用しない方がよい。スリップ検出はキネマティック測位では大変重要な技術なのだが、特に移動体では信頼性の高いスリップ検出法は殆ど存在しない。5/28) しかしこれだけスリップしていながら良く90%もFix解が求まっていると思う。多分地上移動体では一般的な状況だと思う。
....................................................................................................................................
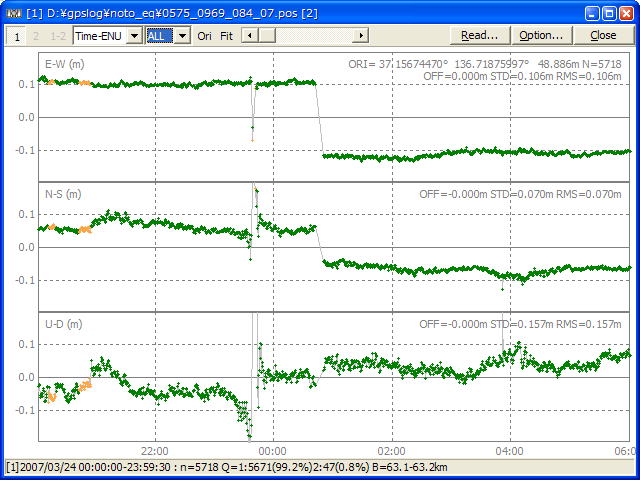
3月の能登半島地震で大きく動いた電子基準点 960575 富来のRNX2RTKP2.0による基線解析結果。基準点は 020969 福光、基線長63.2km。暦はまだ放送暦。23:30の変動は悪DOP条件を拾っている。これ位の基線になるとFix解でも少しフラフラし出しかつFix率も落ちていく。
準天頂衛星システムユーザインタフェース仕様書
IS-QZSS 0.0版
準天頂衛星のユーザI/F仕様書0.0版が公開されている。7月までに1.0版制定予定。準天頂衛星は当初3機構成の予定だったが、昨年3月に方針が変わりS帯サービスが無くなり、1機の技術・利用実証後に2機を追加しシステム実証に移行する2段階計画に変更された。Galileoの例の様に皆測位衛星のビジネス化には苦労しているようだ。IS-QZSS
0.0を見る限り技術的によく考えられている計画だと思うが、実際の開発・運用は初めてのことも多く苦労するのではないか。関係者の方は頑張って欲しい。実は3機構成になるとMSASと組み合わせてある程度の時間帯GPSなしで測位出来る様になる。これは当然日本の外交政策の一環として考慮されているはずである。問題は第2段階に本当に移行できるのかであるが今のところ不確定要素が多く先行きは不透明である。
....................................................................................................................................
ちょっと訳あってGT0.6.3のマニュアルを見直していたのだが、設定項目が多すぎてGPS解析専門家や特別な訓練を受けた人でない限り、一般ユーザが使いこなすのは無理だろうなあと思った。もう少し誰でも使える様にしなければとは思う。
数10kmの基線解析で地震による地殻変動が綺麗に捉えられることが分かったので、100km超基線でやってみたが今度は簡単にFIXしてくれない。これくらいになると基線観測値のみでは推定値収束に時間がかかる。実は基線観測値のみでは位相バイアスと軌道誤差の分離も難しい。ということでRTKLIBに精密暦対応の機能追加。IGU予報値を使って数100km程度の長基線RTKが実用になれば結構応用はあるはずなので、これもテーマ候補の一つ。
....................................................................................................................................
高須, 時間・空間補間した基準局網観測値によるキネマティックGPS性能の評価, 地球惑星科学連合大会2007
昨日の発表資料と細かい解析結果やデータをup。(時間の関係で発表では技術詳細を説明できませんでした。内容にご興味のある方はお問い合わせ下さい。またデータ解析を希望される方もいらっしゃるかもしれませんが、お問い合わせ下さい。)
少し発表の補足。昨日発表は今年度(もしかすると来年度以降も)やるつもりのテーマ、キネマティックGPSの移動体応用、の準備で得られたささやかな知見といったものである。キネマティックGPSの移動体応用実用化には色々な状況の現実データを解析して問題点を潰していくというプロセスが必要だが、データ取得時に一々基準局を近くに持っていって設置しなければならないのはやってられないと思ったからである。電子基準点を使えればこの制約が大幅に緩和される。だからこの成果そのものがそれ程価値のあるものだとは思っていない。さて悪条件の観測データとその状況を同時記録する手段が欲しい。ドライブレコーダ用のwebカメラと安いIMUを導入したいと思っているのだが他にいい手はないだろうか。
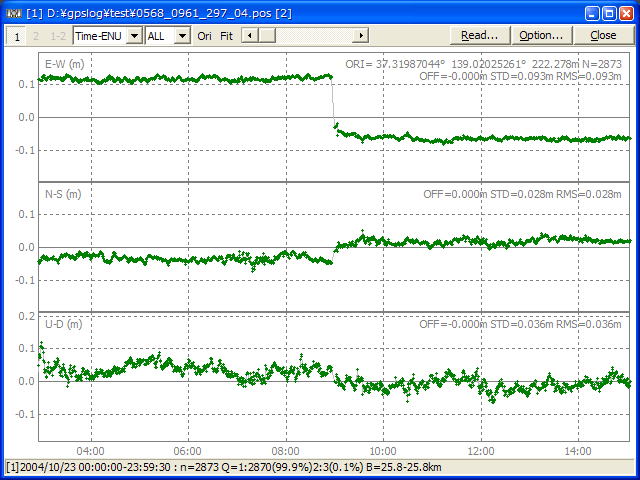
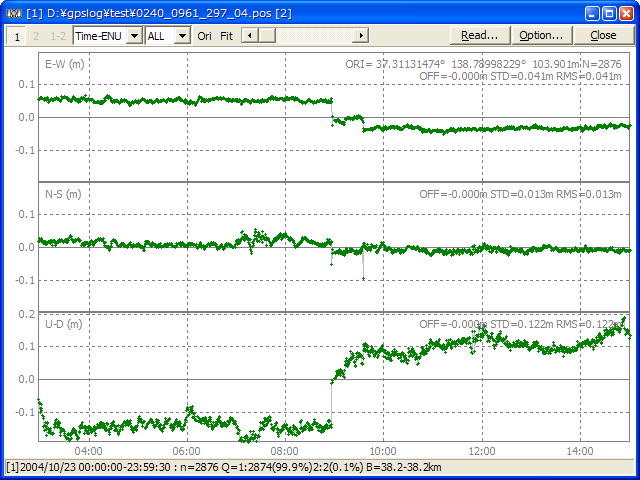
今回、RTKLIBに電離層・対流圏推定機能を入れたので、少し長い基線解析で地震による地殻変動を捉えることができる様になった。RNX2RTKP2.0による2004年新潟県中越地震の後処理基線解析 (30sサンプリング)。電子基準点 960568 守門(上)及び950240 小千谷(下)、基準局は 020961 新潟下田で座標は2004/10/1のF2解に固定。基線長は25.8km及び38.2km。GTによるキネマティックPPP結果と比較してみるとARが効いているのか対流圏の相殺効果か、動いていない時間帯の位置がビシッと決まっている感じがする。ローカルな地震なら充分に使えそうな感じではある。
....................................................................................................................................
地球惑星科学連合大会。自分の発表よりも、色々な方から興味深い発表が沢山聞けて有意義な大会だったと思う。さて少し休養して次に何をやるかを整理したい。(21:56)
....................................................................................................................................
午後から地球惑星科学連合大会2007参加。東北大太田さん、名大伊藤さんらと面白いお話を出来て良かった。さてホテルで明日午前中の発表資料を直す。やはり場違い感が強いが今更変更も出来ないので開き直ってキネマティックGPSの宣伝に徹することにする。明日午後の海洋大ゼミ資料も全然出来ていないのでこれもでっち上げなければいけない。今日は寝られるのだろうか。(21:55)
5/5に書いたNovAtel受信機のキャリアスムージングの件、補足訂正を追加。
....................................................................................................................................
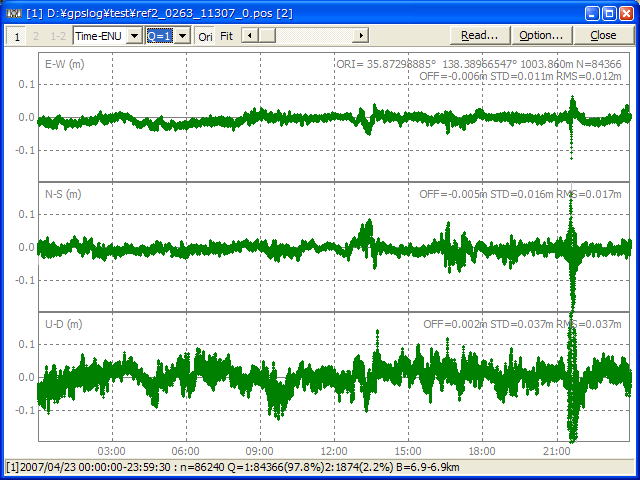
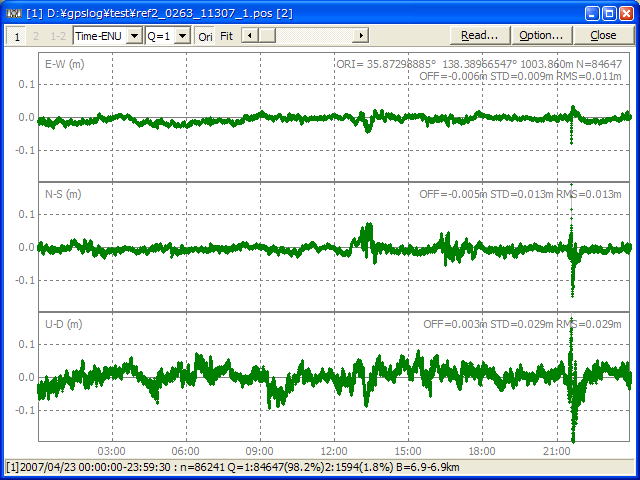
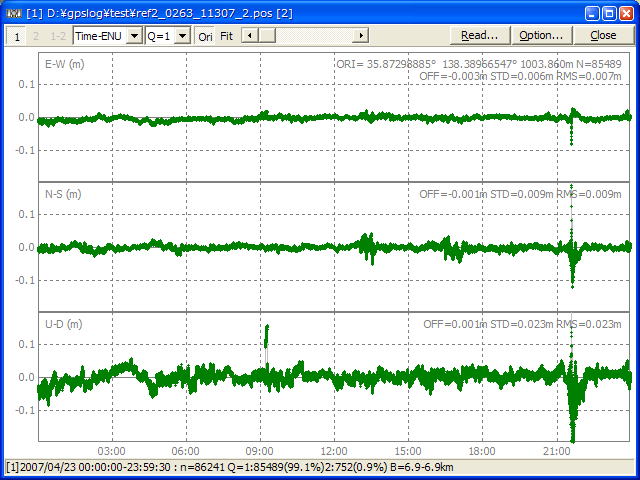
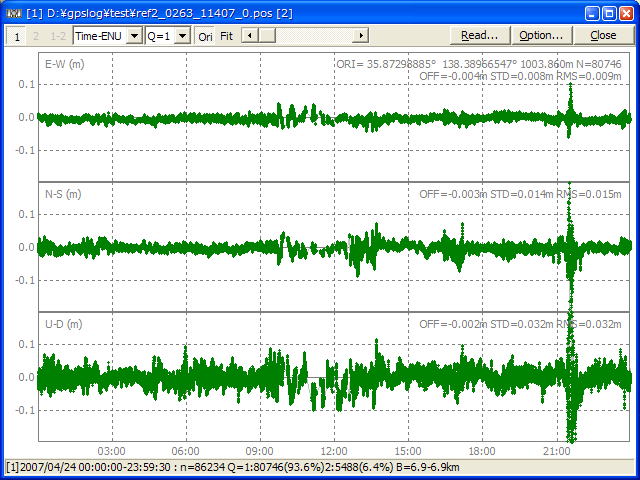
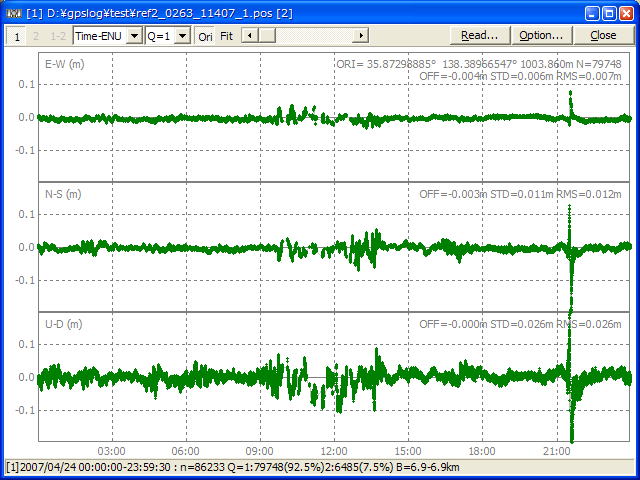
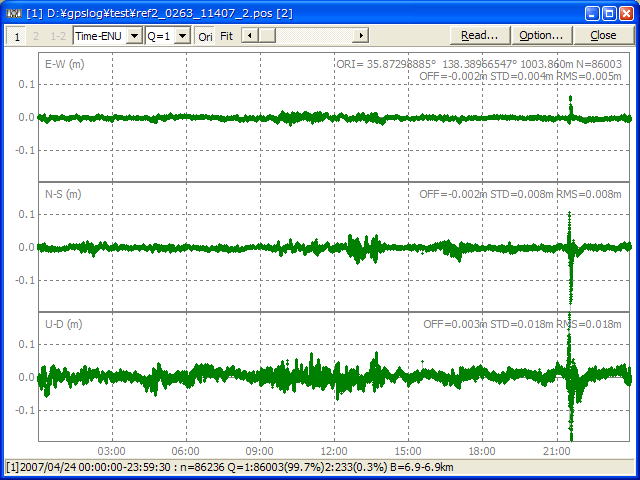
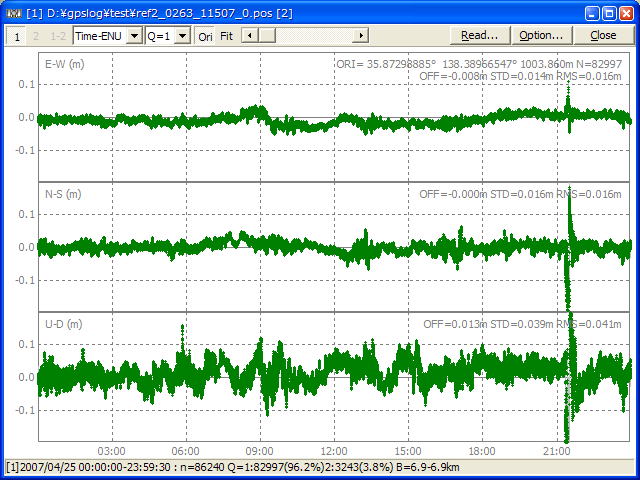
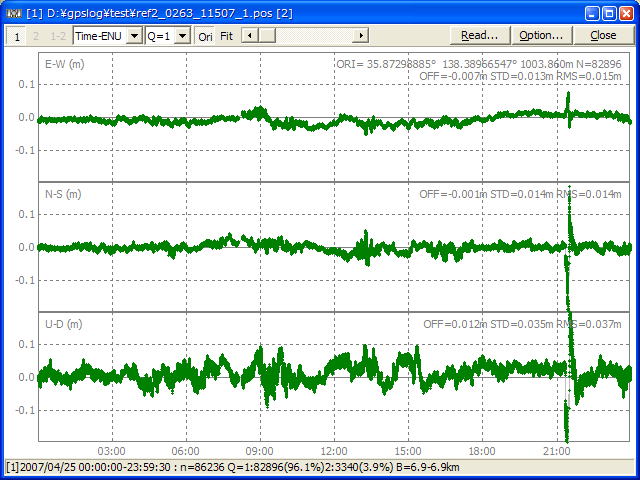
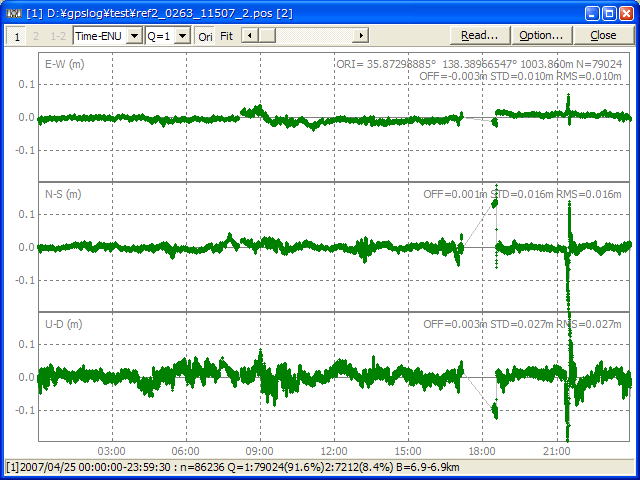
少し長いセッションの定点キネマティック測位結果を記録のため。RTKLIB2.0、ローバ(定点): NovAtel (屋根の上)、基準局: 電子基準点 小淵沢(0263) 30s (基線長=6.9km)、1Hz時計変動補正: IGS USUD、ネットワーク補正: 電子基準点 高根(0797) 30s (基準座標は近隣電子基準点との24Hスタティック測位で決定)
| 日付 | 時間 | 間隔 | FIX解標準偏差 E/N/U (FIX率) | ||
| 基準局時間補間 | +1Hz時計変動補正 | +ネットワーク補正 | |||
| 2007/4/23 | 24H | 1Hz | E:1.1cm,N:1.6cm,U:3.7cm(97.8%) | E:0.9cm,N:1.3cm,U:2.9cm(98.2%) | E:0.6cm,N:0.9cm,U:2.3cm(99.1%) |
| 2007/4/24 | 24H | 1Hz | E:0.8cm,N:1.4cm,U:3.2cm(93.6%) | E:0.6cm,N:1.1cm,U:2.6cm(92.5%) | E:0.4cm,N:0.8cm,U:1.8cm(99.7%) |
| 2007/4/25 | 24H | 1Hz | E:1.4cm,N:1.6cm,U:3.9cm(96.2%) | E:1.3cm,N:1.4cm,N:3.5cm(96.1%) | E:1.0cm,N:1.6cm,U:2.7cm(91.6%) |
4/25 +ネットワーク補正の18:00前後にネットワークRTK方式の不安定性が現れている。基準局間13km(0263-0797)でもこうなので50km間隔基準局網でネットワーク補正値のAvailabilityを100%近くまで持っていくのはなかなかしんどいのではないかと思う。一般的にネットワークRTKの評価というとせいぜい数時間セッションのサンプル数例というケースが多く、あまり信用できる結果とは言えない。多分ネットワークRTKのサービス業者はシステム監視や改良のためこの辺の評価を継続的に行っていると思うが出来ればその結果を見てみたい (もちろんこれはノウハウそのものなので表に出てくるとは思っていないが)。
......................................
asahi.com, 欧州版GPS、民間資金を断念 EUなどが肩代わり, 2007/5/17
Galileoも前途多難な様。GPSが原則無料で使える上に性能面で概ね満足と言える現状では、確かに他の測位衛星システムが(国家戦略としてではなく)
ビジネスとして成り立つのは難しいのかもしれない。さて世界の測位衛星システムは何処に行くのだろう。
....................................................................................................................................
GE Maniacs
Google Earthの使いこなし情報が割と良くまとまっているサイト。結構おもしろい。
ところでGoogle Earthのkml/kmzファイルはインターネットでアクセス可能な場所に置くとGoogle Mapでもほぼそのまま表示できる。Google Earthでは詳細地図表示が出来ないのだがGoogle Mapでは地図上に軌跡を表示することが出来る。またGoogle Earthの航空写真は精度が良くなく数10mのずれが良くあるが、Google Mapは(日本では)Zenrin地図を使っているので1m位の精度は有るようだ。ただ容量の大きなkml/kmzファイルはサーバエラーになるのである程度データを圧縮する必要がある。ということで4/17の走行データ基線解(解析条件は5/17とほぼ同じ。基準局=電子基準点。)を一部切り出しkmzにしてupした。概ね綺麗に道路をトレースしていることが分かる。

http://gpspp.sakura.ne.jp/gmap/rov2_0048_107.kmz
(以上URLをGoogle Mapの検索フィールドにコピーして"地図を検索"ボタンを押すと地図上に軌跡が表示されます)
http://gpspp.sakura.ne.jp/gmap/COM12_070417_020850.kmz
参考のため同時に取ったubloxのMSAS-DGPS解もup。これを見るとubloxも充分使える気もする。ubloxと基線解の差を取ってみるとMSAS-DGPS解でも水平RMSで1~3m位の精度が出ていることが分かる。(厳密にはアンテナ位置が50cm位ずれているのとサンプリングタイミングが数m秒ずれているのも考慮する必要がある。)
.....................................................................................................................................
ION GNSS2007に送っていた、ネットワークRTKのアブストがacceptされたというメールが届く。ただAlternateなので少しガッカリ。まあアイデア一発みたいな内容なので仕方ないか。8月ぐらいまで頑張ってみてちゃんとした成果が出なければ、今年は諦めて少し温めて出し直す方がいいのかもしれない。
ION GNSS2007 Program
B2: Network-Based RTK
Co-Chairs: Dr. Dorota Grejner-Brzezinska,
The Ohio State University (dbrzezinska@osu.edu) and Dr. Giovanni Pugliano, Parthenope University
of Naples, Italy (giovanni.pugliano@uniparthenope.it)
Wednesday Afternoon, September 26 - 2p.m.-5:30p.m.
1. Near Real Time Assessment of the Ionosphere
Effect on High Accuracy GNSS Applications
which Require Ambiguity Resolution: S. Lejeune,
R. Warnant, Royal Meteorological Institute,
Belgium
2. Application of Predicted Ionosphere Model
to Medium Range RTK Positioning: Performance
Assessment: P. Wielgosz, A. Krankowski, L.W.
Baran, University of Warmia and Mazury, Poland;
D. Grejner-Brzezinska, The Ohio State University
3. Long-Range Single-Baseline RTK for Complementing
Network-Based RTK: D. Kim, R.B. Langley,
University of New Brunswick, Canada
4. Undifferenced Ionosphere and Troposphere
Estimation for Network Kinematic GPS: P.M.
Grgich, The University of Melbourne, Australia
5. Joint GPS/GALILEO Precise Positioning
Performance Using Active Reference Networks:
T. Schueler, B. Eissfeller, E. Schueler,
University FAF Munich, Germany
6. Multiple Carrier Ambiguity Resolution
Methods and Performance Benefits for Regional
RTK and PPP GNSS Positioning Services: Y.
Feng, Queensland University of Technology,
Australia; C. Rizos, The University of New
South Wales, Australia; M. Higgins, Queensland
Government, Australia
7. Novel Concept in Multiple GNSS Network
RTK Processing: H-J. Euler, inPosition gmbh,
Switzerland; J. Wirth, FH Rapperswil, Switzerland
8. Data Quality and Coordinate Monitoring
for a Permanent Network: Proposals and Experiences:
L. Biagi, S. Caldera, M.G. Visconti, Polytechnic
of Milan, Italy
Alternates
1. Generating VRS Data Using Atmospheric
Models: How Far Can We Go?: D.B.M. Alves,
L.F.A. Dalbelo, J.F.G. Monico, Sao Paulo
State University, Brazil; L.F. Sapucci, CPTEC-INPE,
Brazil
2. Internet-Based Network-RTK with Self-Distributed
Reference Stations - Concepts and Prototype:
T. Takasu, N. Kubo, A. Yasuda, Tokyo University
of Marine Science and Technology, Japan
3. The Latest Development of a State-wide
GNSS Network-based RTK System in Australia:
K. Zhang, F. Wu, S. Wu, RMIT University,
Australia; C. Rizos, C. Roberts, L. Ge, T.
Yan, University of New South Wales, Australia;
C. Gordini, A. Kealy, The University of Melbourne,
Australia; M. Hale, P. Ramm, H. Asmussen,
Department of Sustainability and Environment,
Australia; D. Kinlyside, P. Harcombe, Department
of Lands, NSW Government, Australia
4. Processing Models for Extending the Range
of Network RTK Positioning: P. Grgich, A.
Kealy, C. Gordini, The University of Melbourne,
Australia
.....................................................................................................................................
現在CDDISのサーバが止まっていて、IGS 1Hz局の観測データが落とせないので困っていたのだが、韓国のIGSデータセンタは1Hzデータのミラーも置いてある様だ。素晴らしい。日本でもこういう地味でも重要な国際貢献をすれば良いのにと思うのだが。
GTをお使いの方は以下行をgt_0.6.3/data/prm_gpssrcs.mに追加するとダウンローダでダウンロード可能になります。
kasi ='ftp://nfs.kasi.re.kr'; % KASI
...
addrs={
...
1,'IGS OBS H-RATE (KASI)', [kasi,'/gps/data/hrate/%Y/%n/%yd/%h/%s%n%H%t.%yd.Z']
...
};
.....................................................................................................................................
4/17の走行データのネットワーク基準局解。基準局データは電子基準点(30s)とIGS
USUD(1Hz)のみ。時間方向と空間方向の補間を両方使っている。やっとのことでここまで来た。今回の目標は、一般入手容易な電子基準点30sサンプリングデータを使って、移動体キネマティック測位が実用になることを示すことだったので、概ね満足。
細かく見ると色々と問題もあるのだが、まあ次のステップには行けそうだ。
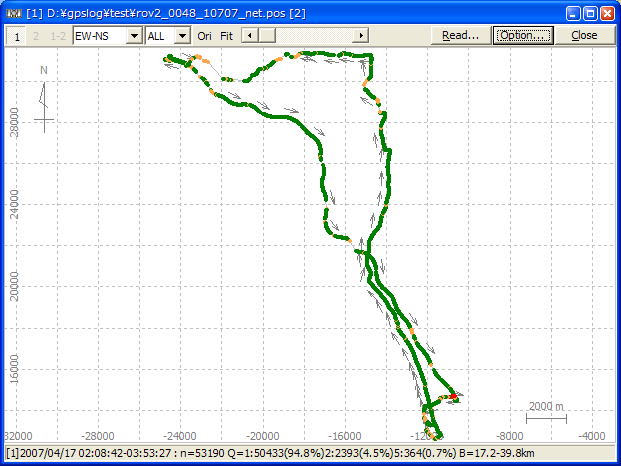
●:FIX,●:FLOAT, 基準局: 電子基準点 川上(0613)+小淵沢(0263)+中道(0048)+IGS
USUD
.....................................................................................................................................
さて昨年やったHR-PPPではIGS 1Hz局数10局のデータを使い、かなりの手間をかけて1Hz 衛星時計を推定した訳であるが、実は30sの補間で有れば、今回やったように相当手を抜いても殆ど性能は落ちない。電離層変動が心配だったが電離層フリーを使うよりL1のみで変動推定した方がむしろ結果が良い様だ。今は30sのIGS時計が手に入るので近くのIGS 1Hz局データを併用すると1Hz-PPPも容易に実現できることになる。
あと、ネットワークRTK補正値を作成するのに単純に基準局網観測値の単純な空間補間で良い様に思われる方がおられるかもしれないが、これは一般にはうまく行かない。これは単純な補間では基準局網観測値Ambiguityの整数性が失われてしまうのでARできなくなるからである。従ってこの問題を回避するため色々と複雑な手順が必要になる。ただ、後処理、長セッション処理ではFix解とFloat解の差はあまりなくなるので単純補間+Float推定という解は十分にあり得る。
結局何が言いたいかというと、色々と手を抜いてあまり性能の落ちない方式というのは考えれば考えられる訳で、あんまり杓子定規に理想ばっかり追ってもダメだということである。
.....................................................................................................................................
発表資料作成。結局時間切れで色々とやりたいと思っていたことが手つかず。従ってあんまり期待しないでください。まあネットワークRTKを含めたキネマティック測位は今年度一杯かけてやるつもりのテーマなので、必ずしも今結果が出なくても良いのだけど。さて今はまだ成果がないのだけれど、世界的にまだやられていなくて面白いと思っているテーマだけ書いておく。どちらもキネマティック測位アルゴリズムがらみ。
・最適部分FIXアルゴリズム。
・衛星初期位相パラメータ推定。
.....................................................................................................................................
GPSキネマティックPPPによる地殻変動観測 セミナ資料 (2004/12)
色々と整理していたら、昨年末に地震研究者の方々を訪問しご意見を伺った際に使用したプレゼン資料が出てきたのでup。HR-PPPによる地震波観測事例が割と良くまとまっているのでは、と思う。
最近地震の方は全然いじっていないし、実は解析すると約束して頂いている観測データがまだ手つかずのままなのだが、区切りがついたらGTの改修と共に少し時間をさきたいと思う。(長らくお待たせして申し訳有りません。実は解析にGTの改修が必要でそこで止まっています。もう暫くお待ち下さい。)
.....................................................................................................................................
さて土曜も終わってしまう。今日はしょーもないプログラムいじりばかりで結局進捗は殆どなかった。仕方ないので発表資料作成開始。いつも少し枚数が多すぎるのでゆっくり話せるように今回は10頁程度におさえるつもり。
.....................................................................................................................................
ここのところ殆ど休んでいないのでちょっと疲れがたまって効率が悪い。5月最後の週は少しゆっくりと休養が取りたいなあ。
.....................................................................................................................................
うー、眠い。やっと問題点判明。USUD 1Hzを入れて4/27のデータでFiX率がやっと89%を越えた。でもちょっと追い込まれてきた。今日は寝る。でもその前にバックアップを取らなきゃ。(2:43)
時間補間については概ね満足な結果が得られたので、次は空間補間。これは従来型ネットワークRTKと変わらない訳ではあるが実は理論は結構難解。簡単に書くと基準局間の整数化した2重差バイアスを1重差バイアスに戻してからL1/L2毎の1重差残差を計算し補正量とすれば良い。後は基準局基線毎補正量をユーザ位置に空間補間する。問題は単純には2重差→1重差の変換はできないので何らかの制約条件の追加が必要。一番簡単なのはどれか1つの衛星の(1重差)バイアスを0にする。ただしここで共通バイアスが発生する(これはユーザ測位計算時に消える)ので、ユーザ側で(基準局で見えない)過多な衛星が受かったとしても使えない。すなわち使える衛星は最も可視条件が悪い基準局に制約されることになる。(補足: まあこれは普通の相対測位でも同じだが、ネットワークRTKの場合、補正に使う全基準局の共通可視衛星しか使えない。)
さて問題は実装。プログラムをいじるのは土曜までと決めているので、間に合うかは微妙。
日本地球惑星科学連合2007年大会
やっと予稿集本文がupされた。D106-010ではGT0.6.3を使った解析で得られた地球潮汐に関する新しい知見が発表されるらしい。どんな結果が出てくるのか大変に楽しみである。
.....................................................................................................................................
定点では問題ないが移動体でFIX率が落ちるバグを作り込んでしまったらしい。色々調べたが原因不明。1日前のバックアップに戻す。この版でもダメ。その前は連休前のバックアップしかないので、その版に戻す。さてこれで連休中作業がパー。
.....................................................................................................................................
更新サービスを購入した Matlab 7.4 (2007a)
が送られてきたので早速ベンチ。
>>bench,a=rand(2000);b=rand(2000);tic;c=a*b;toc,tic;c=inv(a);toc
| LU | FFT | ODE | Sparse | 2-D | 3-D | a*b | inv(a) | version | OS |
|---|---|---|---|---|---|---|---|---|---|
| 0.15 | 0.20 | 0.16 | 0.31 | 0.33 | 0.71 | 2.72 | 3.36 | 7.4 (R2007a) | Windows XP pro SP2 |
| 0.15 | 0.16 | 0.20 | 0.35 | 0.45 | 1.67 | 1.95 | 2.46 | 7.4 (R2007a) | Windows Vista 64bit Home Prem |
| 0.11 | 0.19 | 0.16 | 0.37 | 0.36 | 0.69 | 1.47 | 2.10 | 7.3 (R2006b) | Windows XP pro SP2 |
| 0.33 | 0.33 | 0.20 | 0.31 | 0.45 | 0.67 | 6.91 | 7.59 | 6.5.1 (R13SP1) | Windows XP pro SP2 |
今回のバージョンアップの目玉はマルチスレッドライブラリに対応していることらしいが、マルチコアでも演算が速くなる訳でもない。せっかくなので眠っているVista 64bitにもインストールしてみた。どうもVGAドライバがまだ64bitに最適化されていないようで3Dだけ異常に遅いが、後は似たようなもの。ただ64bitはさすがにメモリが沢山使える。
>> for n=100:10:1000, n, a=zeros(1000000,n); clear; end
XP 32bitではn=160でメモリ不足で落ちるが、Vista
64bitではn=530まで動いて、スワップのせいかHDアクセス中のままOSがハング
(仕方ないのでリセット。HDにはあまり良くないので真似しないように。)
一応実装メモリ一杯は使えるようだ。
2007aでGTが正常動作しないという報告を受けているので調査予定だが、多分対応は6月以降になってしまうだろう。
The IGS Tracking Network Recently active high rate/low latency LEO sites
スマトラ地震解析の際に使えたので日本の1Hz IGS局はUSUDとMIZUの2局だと思い込んでいたのだが、現在MIZUは1Hzデータの提供を停止しているようだ。CDDISのアーカイブを調べてみると、2005/183 (7/2) までのデータで途切れている。基本的に1局でも衛星時計変動補正は可能なのだが、データの安定供給のためにはある程度多くの局が運用されていることが望ましい。USUD以外の日本近隣1Hz IGS局はSUWN, DAEJ (韓国) だが離れているので日本で使うには衛星可視条件が少し悪い。数局で良いので国土地理院はGEONET 1Hzデータを一般公開してくれないだろうか。ところでMIZUは何故1Hzデータ提供を止めてしまったのだろう。
.....................................................................................................................................
ふと、まともなネタが何一つできていないことに気付いた。でもデバッグが終わらない。あと2週間。これは拙い。
さて、色々と機能拡張のためRTKLIBの大幅改修を行っているのだが、長基線やネットワークRTKは本質的にプログラミングが難しいことに改めて気付く。この難しさは、短基線相対測位の二重位相差を前提としたプログラム構造を単純に拡張してもうまくいかないことに起因している。すなわち構造をいったん壊してかなりの部分を書き直さないといけない。残り時間を加味して少し戦略を練り直す必要があるかも知れない。
.....................................................................................................................................
多分電離層の影響でなかなか性能が出ない。プログラムの大幅改修が必要そうだが間に合うか微妙。
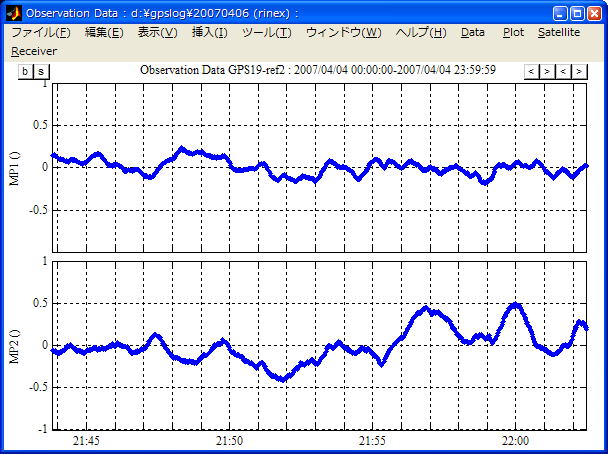
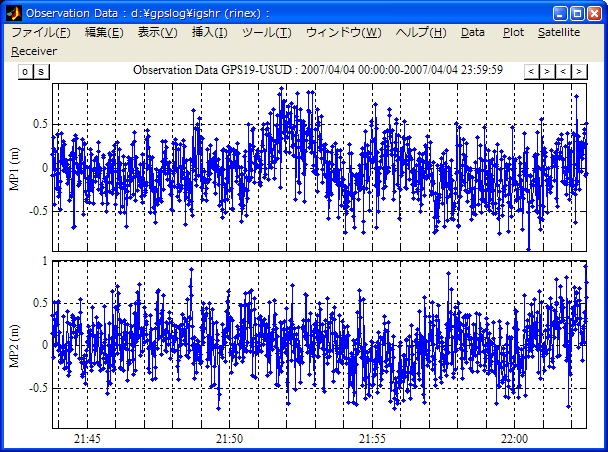
さて発表とは直接関係ないのだがちょっとした発見を紹介。屋根の上のアンテナでとった1Hzデータのコードマルチパス。IGS USUDのマルチパス。アンテナ+受信機はそれぞれNovAtel GPS-702-GG+OEMV-3,
AOAD/M_T+Ashtech Z-XII3。一目瞭然、全くパターンが違う。調べてみるとNovAtelはデフォルトでコードにキャリアスムージングをかけるらしい。キャリアスムージングに使われるHatchフィルタは電離層変動が大きいとむしろ悪さをするので、精密測位では切った方が性能が上がる可能性もある。あとスムージングをかけるとコードと位相に大きな相関が発生するので誤差モデルの設定が難しいという問題もある。
(補足: NovAtelのマルチパスが滑らかなのは、キャリアスムージングを行っているからではないとのご指摘を頂いた。これはNovAtel独特の受信回路特性に起因するものらしい。受信機によってずいぶん特性が違うので解析時のコード誤差モデルのチューニングは結構やっかい。5/22)
.....................................................................................................................................
Matlab測位プログラミングの基礎とGT (その1)
平成2007年度 海洋大研究室ゼミは、MATLABを使いこなして最小限の手間で最大限の研究成果を出そう、がテーマ。第1回の資料をup。
.....................................................................................................................................
| Home | by T.Takasu |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}