|
日記・備考録 |
2006 | 2007/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2008 |
| August | September 2007 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 |
October | Home |
.....................................................................................................................................
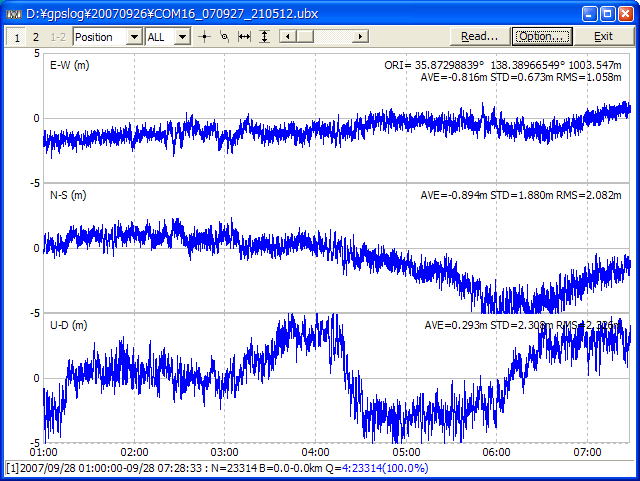
9/28とほぼ同じ時間帯の屋根上NovAtelアンテナ+OEM-VのMSAS-DGPS解 (NMEA出力、基線解比較誤差)。出力のSolution TypeはWAASになっている。NovAtel NMEA解で2周波による電離層補正を行っているか否か良く分からないのだが、これを見る限り、MSAS補正は有効になっている様でこれくらい精度が出れは問題ない。(ubloxのMSAS補正が有効にならないのは今のところちょっと原因が分からない)
.....................................................................................................................................
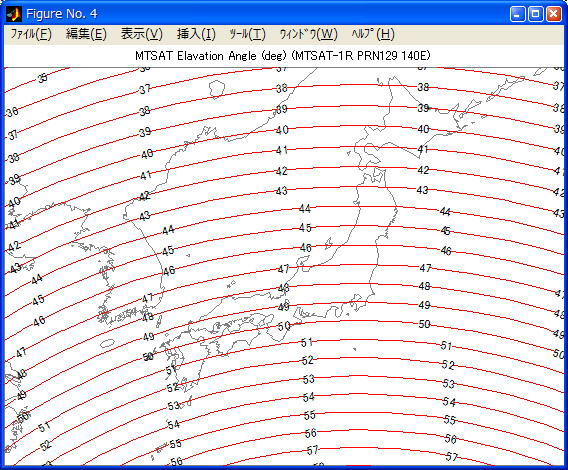
GTを使ってMTSAT(-1R)の仰角を描いてみた (プログラム)。北海道でも40度程度で見えるので街中でも結構有効なのではないかと思う。
.....................................................................................................................................
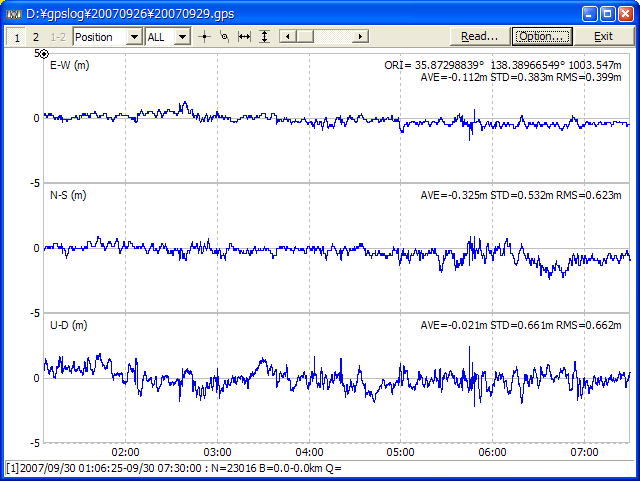
屋根上NovAtelアンテナ+ubloxのMSAS-DGPS解 (NMEA出力、基線解比較誤差)。昨日結果はフィルタ効きすぎで傾向が見えにくかったので、これは最も緩いフィルタ設定 (Dynamic Platform Model = 7-Airborne < 4g) に変更した結果。問題は絶対座標精度な訳だが、正直あんまり良くない。水平2DRMSで3-5mといったところで本当にDGPSが有効になっているかは疑問。ubloxのF/W更新をしてみた方が良いかもしれない。
.....................................................................................................................................
国土交通省 大阪航空局 神戸航空衛星センター, 運輸多目的衛星用衛星航法補強システム(MSAS)信号の送信について, 2007/9/27
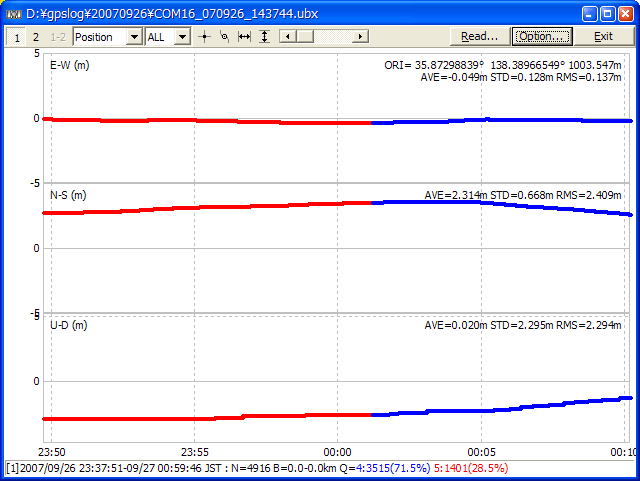
MSAS試験モードを使わない設定 (Allow test mode usage (Msg 0)=OFF) にしてubloxで連続受信し、夜半過ぎに測位解のFix Modeが3D→3D/DGPSに切り替わったことを確認。2007/9/27 0:00JSTに補強信号の送信が開始された様だ。やっと正式運用となったので今後少しちゃんと性能評価をしてみたい。(1:08)
ubloxのNMEA解の誤差。基線解析解比較。赤が単独測位解、青がDGPS解。0:01:12JSTにDGPS解に切り替わっている。ただ、どうもDGPS解に切り替わって精度が上がったという感じはしない。
.....................................................................................................................................
IERS Workshop on Conventions, BIPM in Sevres, France, 20-21 September
2007
先週開催されたIERS Conventionsに関するワークショップ。Workshop programmeからプレゼン資料が見れる。今は中身を見ている暇がないのでとりあえず貼っておく。
ちょっとメモ。昔からWordで固定幅の英字フォントを使って整形出力しようとしても、間に空白が挟まると
の様に右揃えがガタガタになり、どうやっても直らなくて諦めていたのだが、メニュー「ツール」 - 「オプション」 - 「互換性」で「半角文字と全角文字の文字幅を調整しない」をチェックすると
の様に綺麗に揃うことが分かった (未だにWord 98を使っているので分からないのだが、これは新しい版では問題ないのかもしれない)。
.....................................................................................................................................
J. Boehm et al., Short Note: A global model of pressure and
temperature for geodetic applications, J. Geodesy, 2007
GPTと呼ぶ経験的全球気圧・気温モデル。緯度経度及び日付を入力すると気圧・気温を出力してくれる。ECMWF再解析データから平均気候値を算出しそれを9次9階の球面調和関数展開して作った様だ。Fortran及びMatlabのソースコードはここから得られる。気候値を使っているので当然実観測値に比較し精度は落ちるわけだが、GPS観測点で気象観測もしている局は少ないので簡易に気圧・気温を得るには便利。最新のIGSルーチン解析でもGMFと共にこのGPTを使っている解析センターが多い様だ。
PPPではZHDは標準大気で求めZWDは適当なマッピング関数を使って推定しまうことが多い。この手法では実大気と標準大気との差に起因するZHD誤差はほぼZWD推定値に流れて殆ど測位精度は落ちない。従ってこれらの解析で気候値を使う必要性はあまり感じない。多分、数値予報モデルや実観測データまでちゃんと入れないと有意の差が出てこないのではないかとは思う。
.....................................................................................................................................
Russian Space Agency Information - Analytical Centre : News, 21 Sep 2007
> According to the plan of transition
to the improved version of the national geocentric
coordinate
> system “Earth Parameters 1990” (PZ-90.02)
the ephemeris information implementing PZ-90.02
> reference system has been updated on
all operational GLONASS SVs from 12:00 to
17:00 UTC
> 20/09/2007.
GLONASSのephemerisが、2007/9/20 12:00~17:00UTCに、PZ-90.02と呼ぶ新しい基準座標系に切り替わったという通知。PZ-90.02はITRF2000とほぼ一致するとのことでWGS84との座標変換は必要ないとのこと。ICD-GLONASSも改訂される様だ (3.3.4)。GLONASS対応受信機の中にはF/Wバージョンアップが必要になるものもあるかもしれない。
.....................................................................................................................................
昨日紹介したニュースに対する雑感。
普段あまり意識していないのだが、この様にGPS応用分野のリストが示されてみると、GPSが社会インフラとして必要不可欠になってしまっている現実が実感される。最近、EUが資金難に陥っていたGalileoへの追加拠出を決めたというニュースがあったが、これは短期的な採算性を度外視しても国家戦略として衛星測位システムを推進する、という強い意志の表れと見るべきだろう。
.....................................................................................................................................
S.James, IGSMAIL-5643, Termination of Selective Availability
(SA) on GPS III Satellites, 20 Sep 2007
重要なニュースかどうか良く分からないのだが、9/18の米国大統領による公式声明らしい。折角なので和訳してみる。
> 米国大統領は、民生信号の意図的精度低下能力を備えたGPS衛星の調達を止めるべきであるという
> 国防総省の勧告を受け入れた。この決定は世界中の平和的民間活動を支援するためGPSがどこでも
> 無料で利用できるべきであるというGPS利用者に対する米国の強い約束が反映されたものである。
> SAとして知られるこの精度低下能力はGPS
III衛星ではもはや存在しない。米国は2000年5月にこ
> のGPS信号の意図的精度低下を停止したが、この新しい決定によりSA能力自体が削除され、それ
> により世界中の民間利用者がずっと関心を持ってきたGPS性能の不確実性が無くなることになる。
> GPSは、飛行機、自動車、船舶や鉄道の航法、通信、緊急通報、資源探査、鉱業、建築、財務処
> 理、その他多数の異なった分野で世界中の利用者に利益をもたらしてきた。全てのGPS利用者や
> その政府はGPSの未来に関心を持っている。米国は、民生用衛星測位システムの運用における国際協
> 力を推進し、それらの信号の意図的な妨害や破壊を防ぐための国際支援を確立するための活動を継
> 続する。
文章中、"financial transactions"の意味が良く分からないのだがGPS応用でこんなのがあるのだろうか。
.....................................................................................................................................
引き続き、精密測位解説原稿。
精密測位用の潮汐モデルや衛星固定座標変換行列
(衛星アンテナ位相中心やphase windupモデル計算に必要)
用に任意時刻での太陽/月のECEF座標が必要になるのだがこれを計算するのは結構面倒である。精密天体暦を引いてICRF座標を求め、精密歳差/章動モデル+地球回転パラメータを使ってICRF→ITRF座標変換するのが最も精度が良いのだが、ゼロから実装するのは大変だしそんなに精度も必要ない。ということで簡易推算式というのが多数提唱されていおりこれを使う方法もあるのだが、どれが良いのか分からないし、多くのものはこれでも複雑すぎる。また座標系、時刻系、視差、光行差の取扱い等、気をつけないと間違える落とし穴も多い。ということで解説はどうしようか。(GT0.6.3ではJPL
DE405を引いて天体位置を求めるルーチンやECI→ECEF変換行列計算がライブラリに含まれているのでこれを使えばよい。)
.....................................................................................................................................
free ocean tide loading provider
各種海洋潮汐モデルパラメータ生成サービス。局位置、モデル、Emailアドレスを指定すると指定形式の海洋潮汐パラメータが返送されてくる。利用可能なモデルはGOT00.2,
GOT99.2b, FES94.1, FES95.2, FES98, FES99,
FES2004, CSR3.0, CSR4.0, NAO.99b, TPXO.5,
TPXO.6.2, TPXO.7.0, 及び Schwiderski。
試しに以下パラメータ (局名 経度 緯度 高度) で実行してみた。潮汐モデルはNAO.99b及びFES2004。
000841 139.0699 34.9498 0.0000
メールで送られてきた結果(BLQ形式)。係数の意味は、横方向の主要11分潮(M2, S2, N2, K2, K1, O1, P1, Q1, Mf, Mm, Ssa)毎に、上から振幅(上下, 東西, 南北) (m)及び 位相(上下, 東西, 南北) (度)。
000841
$$ NAO.99b_PP ID: 2007-09-18 16:26:05
$$ Computed by OLMPP by H G Scherneck, Onsala Space Observatory, 2007
$$ 000841, RADI TANG lon/lat: 139.0699 34.9498
.01000 .00495 .00176 .00140 .01164 .00896 .00375 .00181 .00024 .00008 .00001
.00258 .00134 .00034 .00038 .00219 .00177 .00070 .00036 .00009 .00003 .00001
.00280 .00105 .00057 .00028 .00209 .00154 .00066 .00032 .00004 .00004 .00004
63.3 83.4 69.8 79.1 -133.7 -151.6 -135.4 -156.7 -12.7 -43.1 -64.0
-12.8 26.5 -21.0 24.2 -170.2 169.5 -172.0 162.7 -25.7 -49.6 -71.1
-78.1 -60.3 -87.0 -66.1 85.1 66.4 83.5 58.2 29.3 31.2 6.4
$$ END TABLE
000841
$$ FES2004_PP ID: 2007-09-18 17:06:21
$$ Computed by OLMPP by H G Scherneck, Onsala Space Observatory, 2007
$$ 000841, RADI TANG lon/lat: 139.0699 34.9498
.00992 .00490 .00167 .00142 .01167 .00905 .00386 .00179 .00025 .00007 .00002
.00263 .00134 .00036 .00037 .00210 .00171 .00070 .00033 .00009 .00003 .00001
.00279 .00098 .00057 .00023 .00209 .00159 .00069 .00031 .00004 .00004 .00004
63.0 80.9 66.6 74.3 -134.0 -152.3 -133.9 -160.1 -16.1 -44.3 -37.3
-12.8 23.6 -23.6 24.2 -169.6 169.9 -169.3 162.0 -36.7 -53.8 -38.9
-79.2 -62.2 -89.9 -67.3 83.4 65.0 84.0 53.8 38.3 30.6 4.5
$$ END TABLE
以下はGT0.6.3に含まれている同一地点の海洋潮汐モデルパラメータ (gt_0.6.3/data/oload_gsi.blq) 。このファイルはあらかじめ全電子基準点をGOTIC2/NAO.99bで計算しその結果をBLQに変換して作成している。概ね0.1mm以下の差しかないが位相が少しずれている。これは何でだろう。
000841
$$ 000841, RADI TANG lon/lat: 139.0699 34.9498
.01009 .00501 .00175 .00141 .01175 .00904 .00377 .00182 .00028 .00010 .00002
.00264 .00136 .00035 .00038 .00218 .00176 .00070 .00036 .00010 .00003 .00001
.00284 .00106 .00057 .00029 .00212 .00156 .00067 .00032 .00003 .00004 .00004
64.3 84.1 70.7 79.1 -134.0 -152.4 -135.9 -158.0 -13.7 -42.7 -58.6
-13.2 25.7 -22.2 23.1 -170.3 169.5 -171.9 163.1 -25.7 -50.3 -77.1
-77.7 -59.9 -86.3 -65.9 84.2 65.2 82.4 56.1 39.8 35.5 7.0
$$
-------------
Notice Advisory to Navstar Users (NANU) 2007109, 18 Sep., 2007
AEP (Architecture Evolution Plan) によるGPS
MCS (Master Cotrol Station) のシステム換装が9/14に完了したとのこと。今のところ特にトラブルは出ていない様だ。
.....................................................................................................................................
某技術解説原稿作成。9月末〆。テーマは精密測位のモデルと精密単独測位(PPP)。どこまで細かく書くかは結構難しいのだが頁数、時間との兼ね合いで決める。一応最新の知見は入れたいのでIGS新解析仕様で取り込まれたモデルには触れる予定。
ちょっとIGSプロダクトに関しての覚え書き。
以前、IGSの時計プロダクトのうち各基準局時計は受信アンテナの
(LC位相中心ではなく) L1位相中心 (かつPコード)
で定義されると聞いたことがある。ちょっと調べた範囲ではこのことが明記された文書が見つからないのだがIGS時計プロダクトを使う場合は要注意。なお、IGSプロダクトの衛星時計はLC位相中心位置、衛星座標は衛星重心位置、基準局座標は測地基準点位置(=アンテナ基準点+偏心)で定義される。また基準局座標は(モデルにより計算した)
地球潮汐効果を除いた平均値である。厳密に言えばこれらの定義自身が使用するアンテナモデルや潮汐モデルに依存して変動するため、IGSプロダクトを使用するためにはIGSのConvention
(すなわち今ならigs05.atx、IERS Conventions
2003+FES2004+CMC) と同じモデルを使用しなければいけないということになる。(でもユーザ側では精度に応じて適当な近似を行わないとやってられない。)
CODE GIM Processing Description, Center for Orbit Determination in Europe,
Astronomical Institute, University of Bern
CODE GIMの頁が移転して行方不明になっていたのを検索で見つけたので貼っておく。
.....................................................................................................................................
SELENE (H-IIA F13) 打上成功。関係者の方々おめでとうございます。ロケット-衛星の正常分離で「打上成功」とされる様で、運用に係わられている方はこれからが本番、頑張って下さい。インターネット中継を見ていたがとても綺麗な打ち上げだった。(12:05)
9/9に書いたが、移動体に対する相対論効果について混乱していたのは、GPS Theory, Algorithms and Application (Xu, Springer, 2003) の相対論効果の項を読んだから。少し長いが引用してみる。(5.3.2 Earth's Rotational effercts, p.61)
> This can be simplified as (Ashby and
Spiler 1996)
> Δρ=[(rr-rs)・vr]/c (5.136)
> ...
> This term of correction is also valid
for the kinematic GPS receivers that are
not fixed on the Earth's surface.
> The velocity vectro in Eq.5.136 is
> vr=ωe×rr+vk (5.137)
> where the first term on the right-hand
side is the velocity vector of the receiver
due to the Earth's rotation, and
> the second term vk is the kinematic
velocity vector of the receiver related to
the Earth's surface. A kinematic
> motion of 100 km/h related to the Earth's
surface can cause additonal Sagnac effects
up to 2 meters.
> The Sagnac correction also has to be
taken into acount for low-Earth orbit (LEO)
satellites (e.g. TOPEX,
> CHAMP and GRACE), which are equipped
with GPS receivers onboard for satellite-satellite
tracking (SST).
結論から言えばここに書いてあることは間違いである。確かにBlue bookのAshbyの説明を読むと(5.136)の様な形式でSagnac効果の説明をしているのだが、vrには受信機速度を含めてはいけない。もし以上が本当なら以上のSagnac効果(?)を無視すると100 kmで走る自動車のKGPSで数m以上の誤差を生じることになるが (補足: 2 mと書いてあるが計算が合わないので2 cmの間違いかもしれない。でも結論は変わらない)、現実にそんなことはない。厳密には、移動受信機には特殊相対論効果による受信機時計遅れが発生するが、これは全観測に同一のオフセットを与えるので測位解には影響しない。また赤道上以外に置かれた受信機にも一般相対論効果により受信機時計の遅れまたは進みが発生するが、これも同様の理由で測位解に影響しない。ただこれらは精密時刻同期にGPSを使う場合は問題になるので補正が必要になる。しかし相対論は難しい。昔、光行差(Aberration)計算を少しやったときにも理解に苦労したが、直感的な理解が成り立たないので導出の途中で間違っても気付きにくい。特殊相対論はともかく一般相対論は特に数学的取扱いが難しく何度かチャレンジしているのだが、まだちゃんと理解できずにいる。そのうちまた挑戦したい。
ずいぶん前に書いたのだが、参考書を読む場合に正しい態度はちょっと引っかかったら本当かどうか自分自身で確認すること。世の中の論文、参考書、解説、ましてやネット上の雑文、には多少の差はあるが嘘や間違いがたくさん含まれている。大事なのは自分の頭でちゃんと考える (あるいは考えようと努力する) ことだと思う。
.....................................................................................................................................
最近、文章が書けなくなっているなあと実感。日本語もまともに書けないのだから、英語などもっと書けない。ついでに言えばプログラムも書けなくなってきた、これは大変に拙い。
.....................................................................................................................................
移動体に対する相対論効果について頭が混乱してきた。再度熟考中。
.....................................................................................................................................
あまり他の人の書いた本の内容を批判しない方がよいと思うのだが、また酷い間違い読者の誤解を招く (17:15修正) 文章を見つけたのでメモ。新・GPS測量の基礎
(土屋他, 日本測量協会, 2002) 5.1.4 連続キネマティック測位
(p.124) から引用 。
> 連続キネマティック測位において、ローバー
(移動受信機) の速度が早いこと自体は問題にならない。
> ...
> エポック期間中での速度変化、つまり加速度があると、記録された搬送波位相には加速度を積分した結
> 果は残っているものの、加速度変化の履歴は後から知ることは出来ない。これが測定誤差となる (図-5.4)。
> ...
> 式から明らかなように、加速度が大きいほど精度は低下し、エポックが短いほど精度には有利である。
多分筆者の単なる思い違いだとは思うのだが、こういうトンデモ本の様なことをさも本当のごとく書いてあるのはちょっと拙いのではないか。原理的に加速度が大きいことにより測位精度が低下することは殆どない(搬送波追尾ループの追尾誤差が少し増える効果はある)。よく読むと以上の文章は「測位精度」のことを書いている訳ではないのだが明らかに誤解を受ける文章で問題がある
(17:15修正)。数少ない和文参考書の一つで、結構影響力が強い本なのであえてここに指摘しておく。
(補足: 受信機の加速度やjerkが搬送波追尾にどういう影響を与えるかは、PLLループフィルタの方式や定数、信号受信強度等により複雑に変化する。基準発振器のジッターも加速度や振動依存性を持っており、加速度により受信機時計が変動し搬送波追尾に影響を与えることもある様だ。細かい解析については、Kaplan
ed. (2006) 5.6を参照。ただ一般的には加速度による搬送波追尾誤差増大は無視できる程度の様だ。19:35追記)
.....................................................................................................................................
Stable North America Reference Frame (SNARF)
Working Group, UNAVCO
UNAVCOのSNARFと呼ぶワーキンググループサイト。GPS観測網を使った北米基準座標系の精密決定が目的のようだ。G.Blewitt、Y.Bock、K.Larson等、そうそうたるメンバが揃っている。興味深いのは最新ワークショップ
(March 2007)のBlewittの発表で、"Ambizap"と呼ぶネットワーク解ARアルゴリズムについて紹介している。詳細はよく分からないのだが、PPP解を入力にして大規模ネットワークのARを高速に行う手法らしい。将来のGIPSYのディストリビューションに含める予定で、4000
CPUのクラスタでも動くとのこと。座標を1mm以内の精度で確定でき(?)
より精密な基準座標系を構築できるとしている。
従来手法では、数100~数1000局程度の大規模ネットワーク解の一括ARは計算量の問題で現実的ではなかった訳で、ARをあきらめる
(PPP)、階層化/クラスタ化して分割AR (GEONETルーチン解)
等、精度面である程度の妥協を強いられていた。これらをスーパコンを使って力任せに解いてやろうというのが出発点であろうか。個人的にはARより対流圏や電離層補正の方が重要な気がするのだが、これはこれで面白い研究ではある。
GPSによる精密単独測位(PPP)に関する覚え書き:
幾何距離モデル
8/31に幾何学距離計算及びSagnac効果補正アルゴリズムについて少し書いたが、ついでなのでGT0.6.3で採用している幾何学距離モデルの解説を貼っておく。GT内部では衛星座標を慣性座標系で表しているため8/31の(0)~(4)のどれとも異なっている。ただECEF→ECI変換行列が必要だったり、逐次計算中で衛星位置を再計算してたり、今見なおすと効率悪い実装だなあという気はする。ところでこの解説でちょっと触れたBerneseの幾何学距離モデル誤差の件、最新版でもまだ直っていないのだろうか。(よく考えるとこのモデル誤差は相対測位では局間1重差でほぼ相殺されるからnegligibleかも。でも5.0から導入されたPPPでは系統誤差として現れそうな気がする)
.....................................................................................................................................
第51回宇宙科学技術連合講演会, 札幌コンベンションセンター, 2007/10/29-31
秋の測地学会講演会は遠すぎるので多分パスだが、ちょっと今後の仕事に関連しそうな発表が幾つかあるので宇科連は参加するかもしれない。でも発表なしで参加するのは気が引けるので来年は何か出したいとは思う。ところで準天セッションは3日間ほぼフルのプログラム。さすがに気合が入っている。
L.A.Lapine et. al., GPS + GLONASS for Precision South Carolina's
GNSS Virtual Reference Network, Inside GNSS, 2007
Inside GNSS最新号から。南カロライナ州に構築したVRSネットワークの事例紹介。基準局は平均70km間隔の45局。ビル屋上や専用タワーでマウント。受信機/アンテナはTrimble
NetR5+Zephr Geodetic Model 2。各基準局はインターネットVPNを介してサーバと接続。サーバはDell ブレードサーバ3台にVMWareとTrimble
NetRTK kernel (GPSNet) をインストール。ユーザインタフェースはNTRIP+RTCM2.3/RTCM3.0/CMR+。同時最大200ユーザサポート可能で補正情報のAvailability
99.9%としている。以上構築コストは予備受信機や工事費用を含めて$1.6M
(\116/$1として約1.9億円)。運用費はメンテナンス費とS/Wライセンス。利用料$600/年×50ユーザで運用費を回収でき、150ユーザつけば6年で全ハードウェア更新可能としている。
運用費見積りが少し甘いのではないかという気もするが、今ならハード/ソフトを買ってくれば、別にGEONETを使わなくてもシステム自体は割と簡単に構築できるわけで日本でも地域限定でどこかが事業として始める可能性もある。(もちろんこれは既存のネットワーク型RTKサービス業者に対し競争力が無ければ事業としては成り立たない訳で、利用料を下げてもユーザがつくかは結構微妙なところかもしれない)
(補足: 細かく把握しているわけではないが、現行ネットワーク型RTKコストを引き上げている要因はGEONETデータ配信料と専用回線費用の様なので、ローカル限定なら自前基準局の方が安く上がる可能性が高いと思う。21:24追記)
.....................................................................................................................................
EGU 2007.Session G1, The Impact of technique errors on reference
frame accuracy and stability, 2007
EGU (European Geoscience Union) General Assembly
2007 (Vienna, Austria, 15-20 April 2007)のITRF2005に関するセッションG1
プレゼン資料集。Geocenter変動、解析モデル、誤差分析等参考になるものが多い。ちゃんと見ていないがとりあえず貼っておく。
.....................................................................................................................................
K.T.Woo, Optimum Semicodeless Carrier-Phase Tracking of L2, Navgation: Journal of The Institute of Navigation, 2000
AS下のGPS L2信号追尾技術、すなわち民生用二周波受信機のL2受信技術に関してのサーベイ及び改良追尾法の提案。既存のコードレス、セミコードレス受信機技術、すなわち(1)Squaring、(2)Cross-Correlation、(3)P-Code Aided L2 Squaring、(4)Z-Tracking、の概要を掴むのに良い。ついでなのでreferenceに上げられている関連U.S.Patentを以下に示しておく。米国公開特許の内容を見るにはU.S.Patent and Trademark Officeでも良いが、今ならGoogle Patent Searchが便利。なお、米国特許の有効期限は以前は17年だったらしい (今は20年)。これらの特許はそろそろ期限が切れるのでL2Cが普及する前に、廉価な二周波受信機が登場してくる可能性もある (と言うか登場して欲しい)。(補足: 米国特許の有効期限は現在は出願後20年。以前は特許権付与後17年だったが、昔の特許は移行措置としてどちらでも選べるらしい。従って例えば下記(1)についてはFiling date=出願日として2011年まで有効ということになる。従って特許が切れるまでまだ少しかかる様だ。9/4追記)
(1) U.S.Patent No.5,134,407, Global Positioning
System Receiver Digital Processing Technique,
1992
(2) U.S.Patent No.4,928,106, Global Positioning
System Receiver Improved Radio Frequency
and Digital Processing, 1990
(3) U.S.Patent No.4,972,431, P-Code Aided
Global Positioning System Receiver, 1990
ところで以上をざっと読んでL2搬送波の捕捉/追尾方法は大体理解できたのだが、L1/L2のP(Y)コード追尾/再生はどうやっているのかよく分からなかった。ちょっと考えるとYまたはWコードパターンが分からないとダメな気がするのだが。もしかすると、再生したC/Aコードタイミングにより一旦 (一時的な) Pコードを生成し、これを使ってWコードを再生して、YコードをPコードに変換しているのかもしれない。受信機によってはP1/P2間の誤差相関が大きいものがあるらしいが、この辺のコード追尾方法が関係しているのかもしれない。ところでPコードって秘密にされているのかと思っていたら、IS-GPS-200を読むと既に仕様として規定がある訳 (3.3.2.2) でPコードを使うこと自体はunspecifiedな仕様を使っている訳ではないことになる。まあ、ASの意味も既にあまりないので、将来的にはSAと同じ様にASも停止される可能性もある。また、P(Y)コードが再生できているということは、Wコードパターンも解析できるということで、解析したWコードを使っている受信機もあるのかもしれない。ただこの方法はWコードが変更されたら受信できなくなる訳でその点でリスクのある実装ではある。
ちょっと受信機に深入りしすぎの感もあるので元に戻らなくてはいけない。
.....................................................................................................................................
| Home | by T.Takasu |