
|
日記・備考録 |
2005 | 2006 | 2007 | 2008 | 2009/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2010 |
| February |
March
2009 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
April | Home |
.....................................................................................................................................
GPS+ambiguity+resolution, Google Patent Search
1月末にRTKLIBをオープンソースとして公開したわけだが、急にpatent大丈夫かなあと心配になってGoogle
Patent Searchで検索。特にRTKにおける整数バイアス決定に関してはRTK-GPS受信機メーカのノウハウの固まりと言って良いので、知らぬ間に特許侵害をしている可能性も無いというわけではない。成立している関連特許だけ見ても、Hemisphere,
Trimble, SiRF, Furuno, Topcon, Navcom, Magellan,
NovAtel, といった錚々たるGPS受信機/チップメーカが並んでいる。正直これらの内容をチェックする時間も暇も、ましてや意欲も無いので、中身を見るつもりはあんまり無い訳だが、誰かチェックしてくれないだろうか。実はRTKLIBのコードにも
(とても面倒なのでするつもりはないが) 特許申請すれば多分成立するであろう
(と思っている) アルゴリズムがいくつか含まれている。いずれにしても先進的なアルゴリズムを含んだソフトウェアのソースコードを公開すること自体、特許侵害の訴訟リスクを含んだものであることはよく認識する必要がある。(もし私が公開しているコード中に特許侵害の可能性のある部分を発見された場合は教えていただけると助かります。回避策を講じるか、それが無理なら公開を停止するしかありません)。
補足: LAMBDAやMLAMBDA自体は、もともと暗号攻撃に使われていた格子基底縮小アルゴリズムをほぼそのまま整数最小二乗による整数バイアス決定に応用したものなので特許は成立し得ないはず。口の悪い人はパクリだという (私はそうは思わないが)。(16:15追記)
.....................................................................................................................................
The International Symposium on Global Navigation
Satellite System, Space-Based and Ground-Based
Augumentation Systems and Applications, Berlin, Germany, 11-14 November 2008
昨年11月に独ベルリンで開催されたInternational
GNSS Symposium 2008のプレゼン資料がupされている。内容は学術研究より、サービス/製品紹介や応用事例といったビジネス指向が強い。NRTKサービスの拡充を初めとして欧州全体でGNSS応用を推進していこうという機運が感じられる。例えばポーランドのNRTKサービスASG-EUPOSの紹介を見るとかなりのコストをかけて基準局網やNRTKサービスシステムを構築しているにもかかわらず
(試験キャンペーン期間ということもあり) 2010/8までは無料でNRTKのサービスが利用できる様だ。
-------------------
Beagle Board到着。Rev.B7。発送は米国からで、UPS経由だった。
ボードのバージョンは2-3日前にRev.Cに切り替わった様で、狙っていた人が多かったせいか、Digi-Keyでもさっそく品切れである。Rev.CはRAM容量が倍 (256MB) になったりUSBポートやLCD
I/Fが追加されていたり、まあ普通に使うにはRev.Cの方がずっと良いだろう。思っていたより背が高かったので予定していたケースに入れるためには使わないコネクタを取り外す必要があるかも。年度末で色々と仕事が溜まっていて、いじれる様になるのは4月の中旬以降だろう。
.....................................................................................................................................
F.Takac et al., GLONASS Amibiguity Resolution, Inside GNSS, 2009
GLONASSを使ったRTKにおけるAR (Ambiguity Resolution)
の問題点の分かりやすい解説。
現在のGLONASSの測位信号はFDMAで衛星間で波長が異なるので、ちょっと考えれば分かるように搬送波位相バイアスの2重差が整数にならない。従って単純には従来のRTK-GPS手法を適用できない。通常は"single-differenence
reference ambiguity" (これは結局搬送波位相バイアスの波長依存項)
を推定して残りを整数化することが行われる。ただし"inter-frequency-bias"
(これはDCBと紛らわしいので一般にはinter-channel
biasと言われる方が多い) の大きさが異機種受信機間では異なるため、異機種受信機間基線でのGLOASS
RTKは問題が発生する。この点、RTCM等でも問題点は認識しているようだが、根本的な解決というのはなかなか難しい様だ。
.....................................................................................................................................
Spaceflight Now, Delta 2 rocket delivers another GPS satellite
to orbit, March 24, 2009
7機目のGPS Block IIR-M衛星 (SVN49/PRN01)
2009/3/24 8:34 UTC 米国ケープカナベラル空軍基地からDelta
2ロケットで打ち上げ成功。これでDelta 2は87回連続打ち上げ成功で成功率は140/142とのこと。衛星は木曜にキックモータで円軌道に投入された後、金曜に太陽電池とアンテナを展開し、チェックアウトの後、数週間後には運用に入る予定。最後のIIR-M打ち上げは8/21に予定されており、その次は年末のBlock
IIF初号機となる。IIFの打ち上げは新しいロケットDelta
4で行われる可能性も有る様だ。

United Launch Alliance Web Cast中継から
Inside GNSS, GPS, GLONASS, Galileo, Compass: What GNSS
Race? What Competition, March 23, 2009
Munich Satellite Navigation Summitの続報。概ね3/6に書いたとおりだが、衛星測位に関する中国-欧州間の関係は未だぎくしゃくしている様だ。
.....................................................................................................................................
United Launch Alliance, Delta II Set to Launch GPS IIR-20 for the
U.S. Air Force
明日のGPS Block IIR-M衛星打ち上げのライブ中継の頁を貼っておく。打ち上げウインドウは、3/24
4:34-4:49 a.m. EDT (8:34-8:49 UTC, 17:34-17:49
JST)。なお、EDTはアメリカ東部夏時間で、3月第2日曜からすでにsummer
time適用中。夏時間適用でない場合はEST、総称的にはETと呼ばれる様だ。(参考) 新しい衛星 (SVN49) の打ち上げが成功すればPlane
B, Slot 2, PRN01が割り当てられる模様。
.....................................................................................................................................
Inside GNSS,
More Problem with GPS IIF; II-R-(20)M Is L5's Plan B, March 18,2009
GPS Block IIFの熱真空試験で何らかの問題が発生していると報じられていたが、これは"plasma event"時にL2送信機に出力異常(低下?)が発生するという問題だったらしい。現在対応策を検討中だが、10月のIIF初号機打ち上げが予定通り実行されるかどうかは微妙な情勢の様。ITU規定により8/26までに
L5信号を軌道上から送信しないと周波数割当優先権が消滅するので、もし3/24に予定されているL5ペイロードを積んだIIR-M(20)衛星が失敗すると(既にバックアッププランはなく)大変なことになる。
IIR-Mの打ち上げ遅延の原因だった分離用タイマは対策が施された様で、失敗確率は低いと思うがGPS関係者は祈る気持ちだろう。
.....................................................................................................................................
年度末に加えて、飛び込みで色々と入って目が回っている。
合間を縫ってDigi-KeyにBeagle Boardを発注。3月末にRev.Cが出るという情報もあるが、RTK-GPS受信機用にはRev.B7でも十分ということが分かったのと、Rev.Cは品薄で手に入らなくなりそうなので。消費税込みで\16,107也。ところでDigi-Keyは\7,500以上は送料無料になるのね。多分米国から直接発送だと思うのだけどどうやって安く上げているのだろう。今はインターネットが有って外国から物を買うのは簡単だけれどUPSやFedexの送料が高すぎるので、日本で手に入るものは日本で買ったほうが安く上がることが多い。これなんとかならないものだろうか。
.....................................................................................................................................
J.Geng et al., Ambiguity resolution in precise point positioning
with hourly data, GPS Solutions, 2009
リージョナル局のみを使って推定したUHD (Uncalibrated
Hardware Delay, UPD/初期位相とほぼ同義) を使ってPPP-ARを行うという研究。1
hr PPPで評価しネットワークから4000km以上離れた局でも顕著な精度改善が見られるとしている。個人的には、電離層の問題があるので本当に1
hr程度のデータで安定に実用的なFix率が得られるのかは少し懐疑的に思う。
.....................................................................................................................................
T.Takasu et al., Development of the low-cost RTK-GPS receiver
with the open source program package RTKLIB, ION GNSS 2009 submission
またギリギリで出すには出した。いつもの様に完全に泥縄である。RTKLIBの組み込みLinux上への移植は、昨年Armadillo-220上にやろうと思っていたのだが、浮動小数点演算が遅すぎてその高速化のためにツールチェインを作り直す途中で挫折している。ずっとカーネルが2.6.16以上に上がらないか定期的にチェックしているのだがどうも期待薄の様だ。今回はBeagle Boardを使う予定。この機能・性能で$150は安い。ただ、今入手できるボードはいくつか使用制限があり、もうすぐ出るRev.Cで改良されるらしいのでこれを待っている最中。アブストが通ればできれば夏までに1枚基板を起こしたいのだがはたして思い通りに行くであろうか。
.....................................................................................................................................
RTKLIB: オープンソースRTK-GPSプログラムパッケージ
ちょっとタイトルを変えた。ver.2.1.0からライブラリだけでなくAPにも比重が移ってきたので。あと需要が多そうなので英語版のサポート情報ページも追加した。ホントはマニュアルの英訳もしたいのだけどこれは時間がかかりそう。
.....................................................................................................................................
N.Kubo, Advantage of velocity measurements on Instantaneous
RTK positioning, GPS Solutions, 2009
ドップラを使った速度推定をRTKに応用して整数バイアス決定率を上げようという研究。ドップラ観測値は受信機FLL
(Frequency Lock Loop) で得られるので、DLL
(Delay Lock Loop) による擬似距離より雑音やマルチパスの影響は小さく、PLL
(Phase Lock Loop) による搬送波位相よりロバストである特性を持つ。ドップラを使うと容易に速度を推定できるのでダイナミクスを仮定して位置予測を行えば整数バイアス推定精度を上げることができる。静止状態でのドップラによる速度推定誤差についても評価し精密測位受信機で3.3cm/s、高感度受信機で13.7cm/sとしている。
市販受信機の出力を見ると既に通常測位解にはドップラが使われていると思われる。RTK解に使われているかは不明だが静止状態で使われることが多いので多分使っている受信機は少ないだろう。ドップラ雑音が受信機によって大きく違うのは回路差もあるがフィルタ定数差も大きい。すなわち受信機のチューニングしだいという部分が大きい。この辺の定数を外部から自由に設定変更できる受信機があると面白いのだが。なお、久保先生の手法とは少し異なるがドップラをRTKに統合し測位性能を上げるというのは昨年ION発表用に実装済みでRTKLIB 2.3か2.4には入る予定である。
.....................................................................................................................................
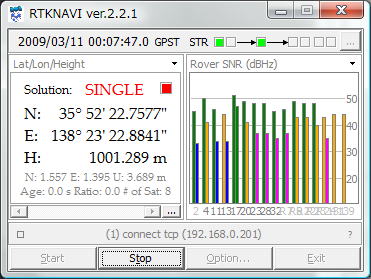
RTKNAVIでGLONASSの取り込みができる様になったが、衛星番号が重なって見にくい。画面レイアウトも変えたくなってきたのだけどマイナバージョンアップですまなくなりそうなのでやめておこう。
RTKLIB: サポート情報 No.5, 6
アメリカでRTKLIBを使うと問題が発生するらしい。タイムゾーンがGMT-
(マイナス) だと駄目っぽい。こんなバグ自分で見つけるのはちょっと無理。ご指摘感謝。2/12に書いた懸念が現実になった訳だが環境に依存しない標準時刻ライブラリってないのだろうか。(結局、gmtime()の逆を行いmktime()と同じ機能を持った関数があれば良いのだが)
補足: 夏時間の問題はmktime() 実行時にstruct tmのtm_isdstメンバを参照して夏時間実施か判定し、夏時間の場合、時を-1するように修正 (パッチrtklib_2.2.0_p3)。可搬性の点では少し危ういが少なくともWindowsではこれで問題ない様だ。しかし、もし日本で夏時間が実施されたら動かなくなるソフトが続出するだろう。少なくとも2000年問題よりずっとたちが悪い。(3/12追記)
.....................................................................................................................................
GLONASS Interface Control Document (version.5.0), 2002
ちょっと必要があってRTKLIBのGLONASS/Gallileo対応改修。GPS決め撃ちで書いている部分が多く結構コードを直さなければいけない。GLONASS/Gallileo対応はver.2.3で入れる予定だったが、前倒ししてver.2.2.1で入る可能性もある。
ところで、NovAtel等ではGLONASS用衛星番号は38~61の24衛星分しか割り振られていない。GLONASS-ICDを調べるとAlmanacのエリアも24衛星分しか確保されていない。従ってGPSと異なりGLONASSでは24機を越える衛星が上がってもその衛星は待機に回す可能性が高い
(予備エリアを使って航法メッセージを拡張する可能性もある)。ということでとりあえず衛星スロット番号は1~24が使えれば良いことにする。
補足: GLONASS ICD version 5.1が公開されていると教えて頂いた。情報感謝。座標系はPZ-90.02に修正されているが、A.3.1.2の誤植は相変わらず直っていない様だ。(3/12追記)
.....................................................................................................................................
修理に出していたNovAtelの2周波アンテナGPS-702-GGが戻ってきた。結局、新品交換になって修理代金は新品価格の約6割 (送料込み) であった。結構痛い出費である。修理期間中、アムテックスさんから代替アンテナをお借りしていたので、今手元に3台のGPS-702-GGがある。せっかくなので3台でデータを取ろうと思ったが、ちょうど追い込みでそんな時間はないのであった。仕方ないのでおとなしく返却することにしよう。
.....................................................................................................................................
W.Gurtner, RINEX: The Receiver Independent Exchange Format Version 2.11, 2007
覚書。RINEX 2.11のSatellite NumberとObservation Code一覧。
snn s: satellite system identifier
G or blank : GPS
R : GLONASS
S : Geostationary signal payload
E : Galileo
nn: - PRN (GPS, Galileo), slot number (GLONASS)
- PRN-100 (GEO)
Note: G is mandatory in mixed GPS/GLONASS/Galileo files
+---------------------------------------------------------------------------+
| System Freq.Band Frequency RINEX 2-character Code |
| Ps.Range Carr.Phase Doppler Sign.Strength |
+---------------------------------------------------------------------------+
| GPS L1 1575.42 C1,P1 L1 D1 S1 |
| L2 1227.60 C2,P2 L2 D2 S2 |
| L5 1176.45 C5 L5 D5 S5 |
| |
| Glonass G1 1602+k*9/16 C1,P1 L1 D1 S1 |
| G2 1246+k*7/16 C2,P2 L2 D2 S2 |
| |
| Galileo E2-L1-E1 1575.42 C1 L1 D1 S1 |
| E5a 1176.45 C5 L5 D5 S5 |
| E5b 1207.140 C7 L7 D7 S7 |
| E5a+b 1191.795 C8 L8 D8 S8 |
| E6 1278.75 C6 L6 D6 S6 |
| |
| SBAS L1 1575.42 C1 L1 D1 S1 |
| L5 1176.45 C5 L5 D5 S5 |
+---------------------------------------------------------------------------+
.....................................................................................................................................
InsideGNSS, Munich Summit Highlights Satellite Navigation
Plan, GNSS Program Stuggles, March 6, 2009
3/3-5に独ミュンヘンで開催されたMunich Satellite
Navigation Summitのレポートが出ている。各GNSSプロジェクトステータスの最新情報。
(1) GLONASSは来年打ち上げのGLONASS-K初号機でL3帯のCDMA信号を実装
(これを読む限りL1/L2はFDMAのまま)
(2) Compassは今年3機、来年7機衛星打ち上げ。30-MEO+5-GEOのFOC完成は2015~2020年。
(3) Galileoは今年中にFOC契約を完了。ただし、Compassとの信号干渉、IOV契約の予算超過に関し調整中。IOV4機の衛星は来年打ち上げ開始。今のところ当初日程・予算通りとしているが、予算削減のため機能・サービス低減も視野に入れているらしい。
(4) GPSはL5ペイロードを搭載したBlock IIR-M衛星を3月後半、最後のIIR-Mを8月、そして次世代IIF衛星初号機を10月に打ち上げ。
-------------------
アクセスログのリファラー見てて見つけた独GPS関連フォーラム。なんかうちのページが参照されている様である。でもドイツ語は昔ちょっと齧っただけなので読めない...。
.....................................................................................................................................
宮原他, GPS連続観測システムが捉えた平成20年 (2008年)
岩手・宮城内陸地震に伴う地殻変動, 国土地理院時報 117集, 2008
国土地理院時報の新しい版が公開されていたので貼っておく。「後処理キネマティック解析では...大きな変動直後には座標値が大きくばらつくたいめ信頼できる地殻変動量を得るためには、変動後に座標値が十分安定するまで解析を行ってから変動を計算する必要がある。」とあるが、ちょっとこれは原因不明。地震程度の加速度で搬送波が追尾できなくなることはないはずなので多分解析ソフトの問題だろう。これはちゃんと開発元に改善を求めるべきだろうと思う。
Y.Hatanaka, A Compression Format and Tools for GNSS Observation
Data, Bulletin of the GSI, 2008
ついでにGSI畑中さんのCRX2RNX, RNX2CRXの紹介論文があったのでこれも貼っておく。個人的にはCRX2RNXがもっと速くなってくれるとうれしい。大量の圧縮観測データを使った解析をする際に、結構CRX2RNXの実行時間が効いているので。でも最近はダウンロード時に同時に解凍してしまう様にしているので今でも問題ないといえば問題はないのだが。
.....................................................................................................................................
やっとポーランドのPiotrさんとメールが通じるようになった。芝刈り機でNtripのVRSサービスも使いたい様で、RTKLIBのRTCM対応待ってるよと言われてしまった。でも彼の庭は今はまだ雪の下なので夏までになんとかすれば良いらしい。世界中には色んな人がいるものである。
教えてもらったIPアドレスで調べてみたらこういうNtripサービスらしい (ASG-EUPOS: ポーランド語? なので読めない...)。欧州では芝刈り機に使うくらいNtripが普及している様である。
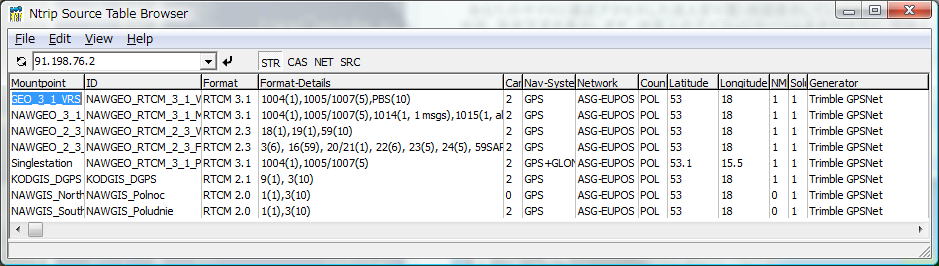
EUPOS Euopean Position Determination System
上記欧州で展開されているDGNSS+NRTK+Geodetic
(後処理) サービスEUPOS。基準局網を見ると主に中東欧州で全部で16ヶ国、800局以上の基準局
(ポーランドは98局) が稼動中。今後広域、特にロシア中西部で多数の基準局の追加が計画されている。EUPOSの技術的な仕様はStandard and Guidelines参照。NRTKのプロトコルはRTCM 2.3, 3.0 or
3.1 (VRS, FKP, MAC)、座標系はETRS89 (European
Terrestrial Reference System 1989) となっている。FKPの場合でも基準局選択のため利用者位置をNMEAで送る必要がある様だ。
.....................................................................................................................................
| Home | by T.Takasu |