{kind=link}
|
日記・備考録 |
2005 | 2006 | 2007 | 2008 | 2009/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2010 |
| April |
May
2009 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
June | Home |
.....................................................................................................................................
E.Gakslatter, RTK Networks Webinar Q&A Follow-UP: Survey
& Construction Newsletter, GPS World, May, 2009
GPS Worldが開催したWebセミナー (Webinar)
のQ&A集の様だが現状のRTK or NRTK技術に関するよいまとめになっている。
-------------------
S.B.Bisnath et al., Innovation: Precise Point Positioning A Powerful
Technique with a Promising Future, GPS World, Apr 1, 2009
PPPに関する現行技術の良いまとめ。私自身はPPPがそれほど"promising"だと思っている訳ではないが、まあ研究としてやるべきことがまだ残っている分野だとは思う。
-------------------
u-blox 5 Receiver Description including Protocol
Specification, 13 May, 2009
F/W ver.6.00対応 u-blox 5マニュアル。rawデータ
(UBX RXM-RAW, RXM-SFRB) はAntaris 4と互換性があるようだ。ということでまだ実物で確認していないがRTKLIB
2.2.1はLEA-5T (F/W ver.6.00) で動くはずである。
.....................................................................................................................................
Y.Shoji, A Study of Near Real-time Water Vaper Analysis
Using a Natinalwide Dense GPS Network of
Japan, Journal of the Meteorological Society of
Japan, 2009
IGUとUSUD局観測データを使って補正した衛星時計を使いPPPによりPWVの準リアルタイム解析を行ったという実験。近隣ラジオゾンデ比較でRMS
3.4mm(夏), 1.6mm(冬) の精度が得られたとしている。USUDを使っているのはHM原子時計なので受信機時計ドリフトを精密に校正できるという意図の様。原理的には多数局観測データを使えば原子時計局を選ぶ必要性はないと思うのだが、解析の安定性を重視しているということだろうか。ただUSUD局の大気遅延補正誤差が全解にバイアスとして現れそうな気もするし、USUD局で受からない衛星
(USUDは西側低仰角の衛星が山に隠れて取れない)
が使えない等いくつか問題も有りそうで、実用的には改良が必要な気がする。
最新測地学会誌のGPS気象学関連論文で知った。
補足: よく読んだらUSUDは時計基準として使っているだけで衛星時計推定にはGEONET 23局を使っている様。でもUSUDの可視衛星の問題や観測欠落の問題があるので必ずしもUSUDにこだわる必要はない様に思う。軌道をIGUに固定しリアルタイムに衛星時計を推定してPPPというのは処理が容易で (regionalでは) 精度も出る様で、今後リアルタイムPPP手法として主流となっていく可能性が高い。これにARと電離層補正を組み合わせたPPP-RTKというのが次の技術ブレークスルーとなるだろう (研究レベルではぼちぼち出始めている)。本当はIGU依存というのは実運用システムだと不安があるのだけど、IGU以上の品質の軌道を自前で調達するのはかなり難しい訳で現状では仕方ないかもしれない。(売ってくれるかどうか知らないが、NavComからStarFireのリアルタイム軌道・時計を買ってバックアップに使うなんていうのは可能かもしれない) (5/28追記)
.....................................................................................................................................
GPS World, Flex Power, Jun 22, 2006
少し古いGPS WorldのFlex Power Modeに関する記事。
5/24のWubbenaの論文にあるようにL2Cのphase
shift問題がややこしいのはBlock IIRMで導入された"Flex
Power Mode"に原因がある。すなわちL2C信号搬送波の位相とL2Pの位相の差は従来のL1C/AとL1Pとの関係のような1/4波長固定ではなく、0または1/4波長に切り替え得る仕様となっている。今まで試験運用の短期間を除いてこの"Flex
Power Mode"が使われていることは無い様だが、今後どのような運用がされるのかは不透明である。いずれにしても現在のところ、L2Cをcarrer-baseの相対測位に使うと、色々と難しい問題を引き起こす可能性があるので、できるだけL2P(Y)を使ったほうが良いと思う
(コード測位には特に影響は無い)。
.....................................................................................................................................
Inside GNSS, First Look Observing the GPS L5 Test Transmission
from SVN49 Using Software Radio Processing, May/June 2009
SVN49/PRN01から送信されたL5信号の初受信レポートが上がっている。これによると送信されているL5信号の信号レベルは
(Block IIF以降の) 仕様よりずいぶんと低いらしい。コードも"hardwired"されたPRN63を使っているし、航法メッセージも載っていない。これではBlock
IIF以降のL5信号試験にはあまりならないのではないかという気がする。主ミッションはITUの周波数割り当て優先権の確保なのでこれで良いということなのだろうが、GPS
L5信号に関してはまだまだ前途多難という感じである。
.....................................................................................................................................
G.Wubbena et al., Some Thoughts on Satellite Induced Phase
Shifts aka "the L2C Quarter Cycle Problem"
and the Impact on RINEX and RTCM, Geo++ White Paper, 30 January, 2009
L2CのQuater-Cycle-Phase-Shift問題に関するよいまとめ。
さて、通常使われる受信機のL2C carrier-phaseの、L2P(Y)
carrier-phaseに対する1/4波長ずれが、プラスマイナス逆ではないかという
(未確認の) 情報がある。この辺はもともとは"carrier-phase"の厳密な定義が、実は結構曖昧という問題から派生しているのだが、今後少し調べてみたい。(この問題は当然異機種間基線の基線解析で正常に整数バイアスが解けないという問題を引き起こす)
補足: この資料の(7), (8) 式 φ_I, φ_Qは通常の定義の"carrier-phase"とは符号が反対であることに注意。(5/25追記)
.....................................................................................................................................
Release Notes: ublox 5 Firmware Version 6.00
> 3 Limitations
> Raw data output rate
> Raw data output cannot be configured
at a different rate than the position fix
rate.
> Therefore the maximum update rate is
limited to 2Hz
とのこと。実はF/W ver.6.00のLEA-5Tを一個予約注文しているのだが一気に使う気が失せた。なおLEA-5TはユーザサイドでF/W updateも出来ないので買う予定の人はF/W versionが上がるまで購入は待った方が良いかも。
-------------------
高須, RTK-GPS用プログラムライブラリRTKLIB ver.2.2の評価及び応用, 日本地球惑星科学連合2009年大会, 2009/5/16-21,
幕張メッセ国際会議場 (PDF: 7.8MB)
21, 22日の発表資料をup。思ったより食いつきが悪かった気がする。やっぱり学会向けには目新しいこと入れないと駄目かなとは思った。
-------------------
17日に書いたF3解の件、連合大会の時に地理院の宗包さんにちょっとお聞きした。それによるとF3解では、つくば1座標を近隣IGS点で取り付けて解いてから、その点を固定点とした相対解でGEONET全点を解いている。再解析解ではIGS再解析暦は間に合わなかったので
(week1400以前の) 解は従来IGS暦と相対衛星アンテナモデルを使っているとのこと。(確認しなかったが受信機は絶対モデルの様)。
相対衛星アンテナモデルのせいで (古い解には)
若干スケールバイアスが残っている可能性はあると思う。
-------------------
International GNSS Service Data Reprocessing
Campaign
上を書いていてIGSの再解析はどうなっているのだろうと検索。これによるとこの5月にITRF2008のsubmissionをして、repro1と呼ぶ再解析解
(orbit & SINEX) が今年2月から12月にかけて次々に作られる予定の様だ。しかし再解析がスタートしたのはかなり前のはずだから結構時間がかかっている。まあ14年分
(1994~2007年) の再解析で各ACが全部再解析を行う必要があるので、手間も時間もずいぶんかかるのは理解はできる。途中で問題が見つかったら下手したら全部やり直しになるから段階的にテストを重ねながら慎重に進める必要もある。多分、地理院の再解析解
(F3解) もずいぶん大変だったのではないだろうか。
.....................................................................................................................................
Open Source GPS-related discussion and support
- High accuracy positioning with low cost
GPS devices: a FOSS project
RTKLIB 2.2.1のサポート関係の回答をしたのでメーリングリストのアーカイブ頁を張っておく。
.....................................................................................................................................
RTKLIB: An Open Source Program Package for
RTK-GPS
RTKLIB ver.2.2.1 is just released. Please
refer ver.2.2.1 Release Notes for the changes from ver.2.2.0. The English
manual for RTKLIB ver.2.2.1 is now in preparation.
It will be published later.
RTKLIB ver.2.2.1をリリースします。ver.2.2.0からの変更点はver.2.2.1 Release Notesを参照下さい。マニュアルは間に合わなかったのでver.2.2.1のマニュアル (英語) は別途公開します。なお海外ユーザが増えてきたので今後RTKLIBの関連文書/頁は全て英語とします。
-------------------
GPS Satellite Outage Calender
GPS運用停止情報カレンダー。過去1998年からのの運用停止データベースも見れる。
-------------------
gnss blog, A detailed look at GPS Satellite SVN-49/PRN-01, 14 May, 2009
SVN49/PRN01の信号異常について解析した人がいる様だ。この解析結果によると搬送波位相観測値は正常だが、擬似距離観測値に数mの仰角依存誤差が載っているとのこと。あとまだepehemerisが正常値でない様だ。
-------------------
GSI F3解としてGEONETの再解析解が公開されたので少しだけ評価してみる。ずいぶん以前オンラインGPS精密解析サービスを評価した際に使った例題。F3解以外はITRF2000なのでIERSのITRF2005->ITRF2000変換パラメータを使ってF3解をITRF2000に変換した値も示しておく。GT-PPP解に比較しF2解で見られた東方向2cm以上のオフセットが改善されているが、まだ1cm位東にずれている気がする。F3解は古いデータは衛星アンテナモデルは何を使っているのだろう。相対モデルだとすると相対解のスケール誤差がまだ残っている可能性がある。今週せっかく連合大会行くので国土地理院の担当者の方に聞いてこよう。
| Service/ Solution |
ITRF Position | Error wrt GT0.5.5-PPP | Note | ||||
|---|---|---|---|---|---|---|---|
| X (m) | Y (m) | Z (m) | E (mm) | N (mm) | U (mm) | ||
| GT-PPP | -3355701.7822 | 4200702.9589 | 3419893.7309 | 0.0 | 0.0 | 0.0 | GT0.5.5 |
| GT-PPP | -3355701.7780 | 4200702.9513 | 3419893.7229 | +1.5 | -2.1 | -11.5 | GT0.6.4 |
| AUSPOS | -3355701.783 | 4200702.963 | 3419893.740 | -1.9 | +5.7 | +8.0 | ref:DAEJ,SUWN,SHAO |
| SCOUT | -3355701.7828 | 4200702.9676 | 3419893.7398 | -5.0 | +3.6 | +10.8 | ref:DAEJ,SUWN,SHAO |
| OPUS | -3355701.784 | 4200702.955 | 3419893.746 | +3.8 | +13.8 | +6.5 | out of service range |
| AUTO GIPSY | -3355701.8305 | 4200703.0400 | 3419893.7863 | -12.9 | -3.8 | +108.6 | without antenna offset |
| CSRS-PPP | -3355701.7910 | 4200702.9647 | 3419893.7317 | +3.3 | -4.7 | +8.9 | |
| GSI F2解 | -3355701.8161 | 4200702.9610 | 3419893.7359 | +25.2 | -8.1 | +21.9 | |
| GSI F3解 | -3355701.7967 | 4200702.9603 | 3419893.7513 | +10.4 | +11.7 | +19.5 | ITRF2005 |
| 同上 | -3355701.8002 | 4200702.9633 | 3419893.7396 | +11.3 | -0.5 | +17.0 | ITRF2000 |
補足: せっかくなのでGT0.6.4による再解析解を追加。アンテナモデルはIGS_01.PCV。対流圏はGMF+GPT+Gradient。Ocean LoadingはON。RelativityはShapiro-delayを抜いた。GT0.5.5解はNMFバグがあるがGlobal-Scale-Offsetの補正が入っている。GT0.6.4による再解析解には入っていない。GT0.6.4解の上下オフセットがちょっと気になる。(16:40追記)
補足: 5/23に補足を書いた (5/23追記)
.....................................................................................................................................
来週の発表用に昨日RTKLIB 2.2.1と一緒に甲府まで中央高速を使ってドライブしてデータを取ってきた。興味が有ったのは移動体でちゃんとNRTK基準局のハンドオーバをしてくれるかという点だったが、記録したデータを調べてみるとこれは×であった。すなわちVRS位置やRRS選択はサーバ接続時に固定され、ユーザがどれだけ移動しても移動してくれない。これではユーザから連続的にGPGGAを投げる必然性がないと思うのだが、少なくともNGS (日本GPSデータサービス) のVRS/RRS (Trimble GPSNet) はそういう挙動を示す。したがって数10km以上の移動体をNRTKを使って連続トラッキングするのは現状では難しいということになる。まあ測量ユーザが殆どなのでそんな需要はないということなのかもしれない。サーバに繋ぎなおせばVRS位置やRRS位置は更新されるので、次期版には基線長が指定以上になったら繋ぎなおすオプションをつけようか、と思っている。
.....................................................................................................................................
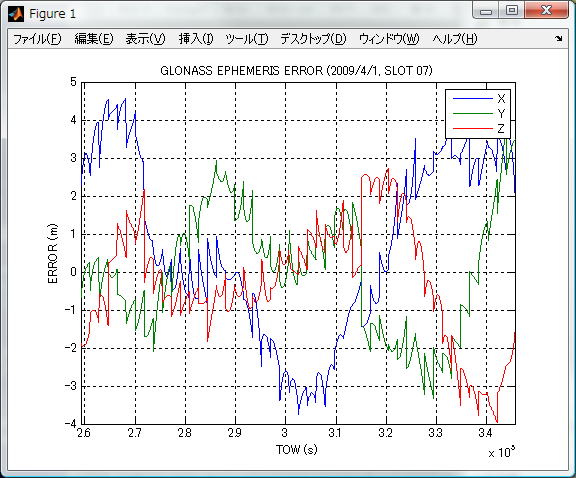
覚書: GLONASSのephemeris計算コード例。GLONASS ICD A.3.1.2にはxdot[4], xdot[5]の式に誤植があるので注意。これは精密暦と比較してみれば一目瞭然。
static void deq(const double *x, double *xdot, const double *acc)
{
double a,b,r2=dot(x,x,3),r3=r2*sqrt(r2),omg2=OMGE*OMGE;
a=1.5*J2*MU*RE*RE/r2/r3; /* 3/2*J2*myu*Ae^2/r^5 */
b=5.0*x[2]*x[2]/r2; /* 5*z^2/r^2 */
xdot[0]=x[3]; xdot[1]=x[4]; xdot[2]=x[5];
xdot[3]=-MU*x[0]/r3-a*x[0]*(1.0-b)+omg2*x[0]+2.0*OMGE*x[4]+acc[0];
xdot[4]=-MU*x[1]/r3-a*x[1]*(1.0-b)+omg2*x[1]-2.0*OMGE*x[3]+acc[1];
xdot[5]=-MU*x[2]/r3-a*x[2]*(3.0-b)+acc[2];
}
static void glorbit(double t, double *x, const double *acc)
{
double k1[6],k2[6],k3[6],k4[6],w[6];
int i;
deq(x,k1,acc); for (i=0;i<6;i++) w[i]=x[i]+k1[i]*t/2.0;
deq(w,k2,acc); for (i=0;i<6;i++) w[i]=x[i]+k2[i]*t/2.0;
deq(w,k3,acc); for (i=0;i<6;i++) w[i]=x[i]+k3[i]*t;
deq(w,k4,acc);
for (i=0;i<6;i++) x[i]+=(k1[i]+2.0*k2[i]+2.0*k3[i]+k4[i])*t/6.0;
}
extern void geph2pos(gtime_t time, const geph_t *geph, double *rs)
{
double t,tt,x[6];
int i;
t=timediff(time,geph->toe);
for (i=0;i<3;i++) {
x[i ]=geph->pos[i];
x[i+3]=geph->vel[i];
}
for (tt=t<0.0?-TSTEP:TSTEP;fabs(t)>1E-12;t-=tt) {
if (fabs(t)<TSTEP) tt=t;
glorbit(tt,x,geph->acc);
}
for (i=0;i<3;i++) rs[i]=x[i];
}
補足: ephemeris計算は計算量の上で結構効くところなので数値積分の実行効率を気にする方がいるかもしれない。ただ実験してみると上記積分ステップ (TSTEP) は180s位までは殆ど精度劣化しないので、数値積分のステップ数は最大でも5-6回に抑えられる。それでもGPSに比較すると単純な実装では計算量が多い (でもGPSはsin, cos演算が多いのでCPU時間ではそんなには差がないと思うが)。高速化するためには前回の計算値 (時刻+位置+速度) をキャッシュしておいて、それを初期値にして数値積分すれば良い。(16:30追記)
上記で計算したGLONASS ephemeris誤差例 (10s間隔)。IGS精密暦比較。予想していたよりずっと精度が良い。精密暦は10次多項式補間して衛星アンテナオフセットZ成分だけ補正。座標系変換はしていない。なおIGS精密暦のGLONASS clock-biasはGPST基準の様で、GLONASS ephemerisとは大きなオフセット (所謂GGTO) が出る。(18:10追記)
.....................................................................................................................................
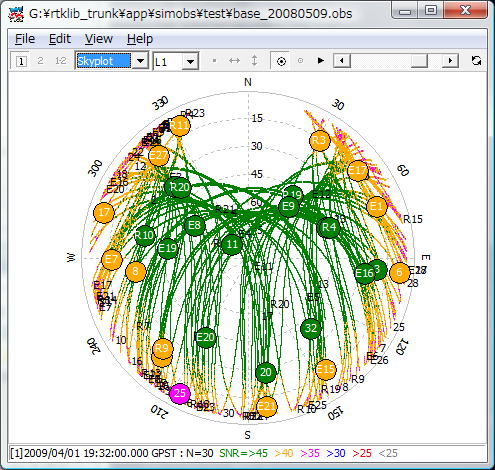
RTKLIB 2.2.1の隠し機能の実装。とりあえずGLONASSのnavigation data関係。2.3.0でactivateする予定。隠し機能なので通常は使えない。どうやって使うかは秘密。GPS+GLONASS+GalileoのSkyplot。GPS+GLONASSは2009/4/1の実ephemeris。Galileoはシミュレーション (27機)。まだGLONASSがフルコンフィギュレーションではないが最大で30衛星見える。この状態のHDOPは0.4である。
.....................................................................................................................................
国土地理院, 電子基準点の新しい「日々の座標値(F3)」-より高い精度で地殻変動の監視が可能に-, 2009/3/26
今更ながら4/1からGSI F3解が提供開始されていることを知った。最新だけでなく1996/3/21からの13年分の再解析解が全部提供されるようだ。アドレスは以下の通り(GTダウンローダ定義型式)。
gsi ='ftp://terras.gsi.go.jp/data'; % GSI
2,'GSI POS(F3) GEONET', [gsi,'/coordinates_F3/%Y/%S.%y.pos']
-------------------
V.Schwieger, Accurate High-Sensitibity GPS for Short Baselines, EILAT 2009 FIG Working Week Surveyors Key
Role in Accelerated Development, Dan Eilat
Hotel, Eilat, Israel, 3-8 May, 2009
u-blox AEK-4Tで基線解析して評価しましたという論文。ローコストGPS用アンテナのPCVをちゃんと測っている論文は初めて見た。どういうシンポジウムかよく理解していないのだが、某メーリングリストの投稿で知った。
-------------------
GAO U.S. Government Accountability Office,
Global Positioning System: Significant Challenges
in Sustaining and Upgrading Widly Used Capabilities, May 7, 2009
GPSの将来に関するGAOレポート。結論として今のままではGPSの将来は危ない、という感じか。Block
IIFの開発もずるずる遅れているので後2-3年もすると危機的な状況はもっと顕在化するだろう。使う側からすると、GalileoもGLONASSもQZSもCompassもあるから別にGPSがなくても、という状況に早くなると良いのだが。
補足: Inside GNSS誌に記事が出た(参照)。(5/14追記)
-------------------
RTKLIB 2.2.1仮凍結。試験。
Dependency Walker 2.2
DLLの依存関係解析ツール。プログラム実行時の動的モニタもできる。非常に便利。Visual
Studioにも付属している様だが、いままで使ったことがなかった。RTKPOST_MKLが素のXP上でエラー終了してしまうことが分かり、調査が難航していたのだが、これを使ったらMKLの一部dllがないのが原因とすぐ分かった。
.....................................................................................................................................
J.Kouba, A GUIDE TO USING INTERNATIONAL GNSS SERVICE
(IGS) PRODUCTS, May 2009
KoubaのIGSプロダクト利用ガイドが更新された。一応最新の状況が取り入れられている様だがPPPの補正モデルは最小限の変更という感じである。キネマティックPPPの精度評価結果が含まれているのだけど、CODEよりIGS30sの方が精度が良いという結果になっている。これって本当。(自分ではちゃんとは評価していないが、まだIGS30sは時計の品質問題が残っていると聞いている。)
.....................................................................................................................................
Stanford's 2008 PNT Challenges and Opportunities
Symposium, 5-6 November 2008
昨年11月に米スタンフォード大SCPNT (Stanford
Center for Position, Navigation and Time)
が開催したシンポジウムの資料がupされている。なかなか面白い発表が多い。特に興味深かったのはSportvision社Milnes氏のNascarレーシングカーの位置をRTK-GPSでリアルタイムトラッキングしている事例。初期化時間を短縮するためレース場の3Dモデルを入れて拘束を掛けているらしい。レーシングカーの姿勢をとるためIMUも積んでいる。その他、RTKのPrecision
Agricultureへの応用事例もある。RTK-GPSの測量以外への応用として参考になる点が多い。
-------------------
なんか昨年末からずっとコード書いてばかりでさすがに疲れ気味。GT0.6.4もリリースしたし、RTKLIB 2.2.1リリースで一区切りついたら少し休むかなあ、と思っている。IONリジェクトされて自分の立ち位置を整理するのにもいい機会でもあるし。
.....................................................................................................................................
D.Goldstein, GPS Program Update to ENC-GNSS 2009, May 4, 2009
現在伊ナポリで開催中のENC-GNSS 2009での、GPS
Wing Chief Engineer Goldstein氏のプレゼン資料がupされている
(多分発表はこれから)。その中で、先日打ち上げられたBlock
IIR-M SVN49/PRN01の信号異常について触れている。"out
of family" measurement discovered、とされているだけで詳細は不明だが、解析と対策に少なくとも後2ヶ月はかかるとのこと。最近の衛星は打ち上げ後2週間程度で運用開始となるケースが多かったので、何故PRN01が未だunhealthyのままなのか不明だったが、どうもこの信号異常が原因だった様だ。L5ペイロード以外は従来のBlock
IIR-Mからの設計変更は無いはずなのでL5ペイロードの信号干渉等が疑われるが、もしそれが原因だとすると遅れているBlock
IIFの打ち上げ日程に再度影響がでるかもしれない。
補足: GPS World誌に記事が出た (参照)。“measurements with larger than expected
pseudorange errors that are elevation-dependent,
and that we have not seen before. We have
experimented with a few fixes and it looks
very promising.” とのこと。(5/5追記)
Inside GNSS誌にも記事が出た (参照)。やっぱりL5ペイロードが原因だと推測されている様だ。次のBlock
IIR-M、その次のIIFの打ち上げ日程への影響が懸念されており、GPSの綱渡り運用は続くといったところか。(5/6追記)
.....................................................................................................................................
まだ通知は来ていないがIONのsubmissionがrejectされた様で少し (というのは嘘でホントは結構) ショック。学術研究としては価値が無くても技術開発としては意味があると思っていたのだが、それを否定されたということで今後の方向付けを見直す必要があるかもしれない。
-------------------
GT0.6.4も時間がかかっている割に0.6.3から殆ど進化していない訳で、何だかなあとは思う。正直言って次の版が有るかどうか分かりません。理由はMATLAB本体のバージョンアップに伴う諸々の対応が嫌になってるからで、毎年の保守ライセンス費用も無視出来ない。ということで今回GPLにした理由は、使いたい人は後は自分でお願いします、という意味合いが大きい。
.....................................................................................................................................
GPS Precie Analysis Software GpsTools (GT)
GpsTools ver.0.6.4 (GT0.6.4) を一般リリースします。本バージョンからライセンスはGPLv3としますので自由に利用・配布・販売等して頂いてかまいません。サポートは電子メールで行いますが必ずしも迅速な回答はできないかもしれないことをこ了承下さい。ver.0.6.3からver.0.6.4への変更点についてはver.0.6.4 release notesを参照下さい。本バージョンからサポートされる動作環境はMATLAB
v.7.3 (R2006b) 以降 (32bit, 64bit) となります。恐れ入りますがv.7.2
(R2006a) 以前のMATLABは動作対象外としますのでご了承下さい。
-------------------
GT0.6.4のweb pageについてはupdate済みですが、プログラムパッケージについては最終調整中でまだuploadしていません。もうしばらくお待ち下さい。(5:00)
補足: 最終プログラムパッケージをupload。(12:30)
.....................................................................................................................................
| Home | by T.Takasu |