{kind=link}
|
日記・備考録 |
2005 | 2006 | 2007 | 2008 | 2009/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2010 |
| November | December 2009 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
Janurary | Home |
....................................................................................................................................
さて、今年も大体お終い。今年を振り返ってみると、RTKLIBやGTを公開して沢山の人に使ってもらえる様になったというのが大きなトピックだった。でもそれ以外はなんか地味な進展しかなかったなあという印象。来年はQZSS初号機やGalileo初号機 (これはさ来年かも) が上がったりしてGNSS関係者には激動の年になりそう。私も新しい仕事のオファーが来たりしてなんとかやっていけそう。結局、技術って地道な積み重ねでしか向上しないので、少しづつ出来ることを増やしていけば良いんじゃないかなとも思う。正月がつぶれそうなのは困ったけどまあこれも勉強。いずれにしても皆様よいお年を。
....................................................................................................................................
色々と工数見積もりが甘かったなあ。来年の正月休みはほぼ潰れること確定。
....................................................................................................................................
Yahoo! ニュース, アメリカも慌てて対応「GPS2010年問題」の真相, 2009/12/23
GPSの2010年問題というのがあるんだそうです。ということで坂井さんだ。ついでにWikipediaの「準天頂衛星」の項で「2015年には合計3機となる」と断定してるけど、これはまだ何も決まってないんじゃないのかなあ。でもシリウス衛星っていうのがあるのははじめて知った。Wikipediaもたまには役に立つ。
....................................................................................................................................
Galileo初号機の打ち上げが2011年5月以降にずれ込みそうという話が出ているよう (参考)。さて予想通り逃げ水の様に徐々にスケジュールがスリップしつつある訳だがFOC完成はいつになるのだろう。
-------------------
RTKLIB 2.3.0のダウンロード数が1週間で4000件を超えた。ありがたいことである。できれば色々とフィードバックを頂けると将来の版に反映できるのではないかと思う。
....................................................................................................................................
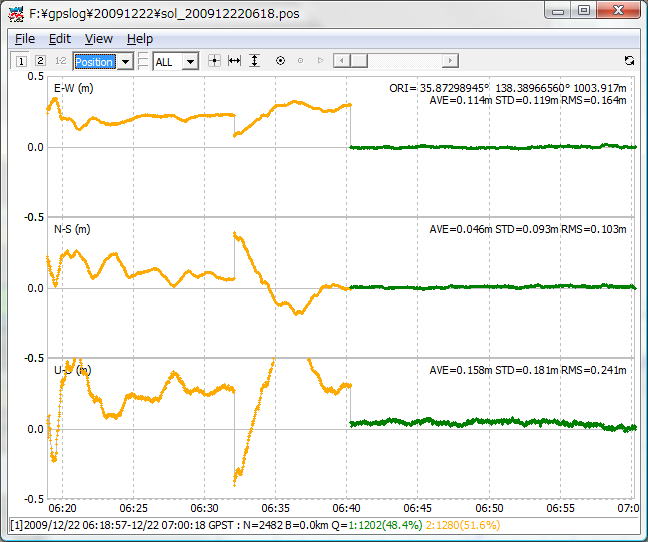
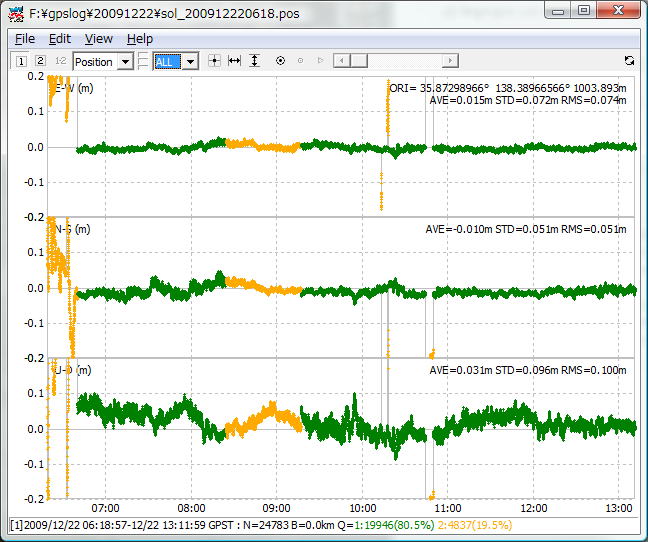
長基線RTK (基線長139km)。基準局は3023千葉市川。First fixまで時間がかかるのだけど一度Fixしてしまえばそこそこ安定している。ただまだ放送暦なので精度的には少し厳しい。これは今後精密暦 (IGU) 対応が入る予定。なおFIX率はパラメータにとても敏感でデフォルト値ではなかなかFixしない。長基線解例、このケースでFirst Fixまで20分以上かかっている。
補足: 7H程連続運転した結果。Fix率80.5%で、Fix解の標準偏差: E: 0.7cm,
N: 1.1cm, U:2.9cm。放送暦を使っているにしては思ったより良い。これ位ならリアルタイム地殻変動観測や津波計にも十分使えるのでは。問題は全衛星スリップした等の状況での再初期化時間や、夏季や電離層擾乱時の性能なのだがこの辺は多分来年一杯かけてちゃんと評価する予定。(20:20追記)
もしRTKLIB 2.3.0を使って長基線RTKの評価をなされる方がいらっしゃるなら以下コードを修正しAPを再ビルドして利用下さい。オリジナルは電離層パラメータの初期標準偏差が妥当でなく初期化性能がかなり落ちています。ユーザ変更できないパラメータなので再ビルドが必要。次版からは変更可能とする予定。(20:34追記)
rtklib_2.3.0/src/rtkcmn.c L.110
{30.0,0.002,0.02}, /* std[] */
....................................................................................................................................
ホントはもう買うつもりはなかったのだが、しかたなくMatlabの保守サービス購入。再加入を入れて\132,300也 (2011/1まで)。GT0.6.4がR2009aで正常動作しないとの問い合わせがあったからである。手元にあるMatlabはR2008bまでで手元の環境では不具合が再現しないし、今後同じ様な問い合わせに対応できないので。実は色々な事情でGT0.6.5の開発を開始しようかなあと思っていることもあって。なお問い合わせのあった問題は最終的にR2008aをインストールして解決したとのこと。
....................................................................................................................................
SemiDynaEXE ver.1.0.1を使って以下結果を変換して座標差を確認しようとしたが挫折。誰が実装したのか知らないがもう少しマシな設計できないのかね。なお一括変換で最初の行しか変換されないのはバグではないかと思う。
-------------------
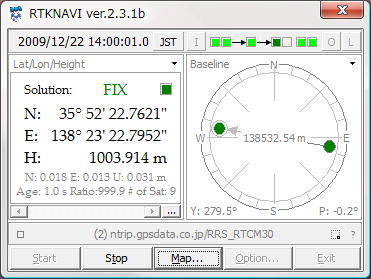
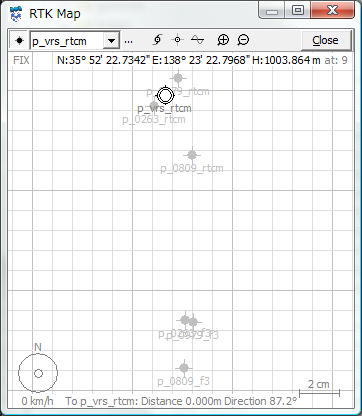
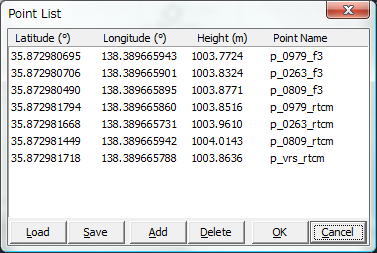
下のセミダイナミック補正に関して、NRTKの基準点座標がどれくらい歪んでいるか確認するため、RTKNAVI 2.3.0とNGDSのNRTKを使って屋根のアンテナ (GPS-702-GG) 位置を測ってみた。基準点を0979 (基線長6.1km), 0263 (6.9km), 0809 (22.9km), VRS (0km) に変えてstaticモードで測位させた。受信機はOEMVの2周波でアンテナPCVを入れている。今の時間、全て即時FIXして15秒間観測して最終座標を記録した。実基準点は座標をF3解 (2009/1/1)とRTCMのアンテナ座標を切り替えて実験した。以下が結果。Point Listで *_f3がF3解、*_rtcmがRTCM座標を使ったもの。F3解はITRF2005なので*_f3はITRF基準, *_rtcmは測地成果2000基準と考えて良いと思う。この辺りでの差は水平11cm位。RTCMは基準点を変えた結果の一致性があまりよくないが、これは座標系の歪みを表していると考えて良いと思う。F3解を使ったものも上下差が6-10cm出ている。基準点の標高差が大きいので対流圏モデル誤差が出ている可能性があるが、これは要チェック。
-------------------
国土地理院, 「セミ・ダイナミック補正」の導入について, 2009年12月4日
測量で使われる座標系と現実の座標系が地殻変動によりずれていく効果を補正するため、来年1月から「セミ・ダイナミック補正」が基本測量と一部公共測量に導入されるとのこと。補正用ソフトウェアSemiDynaEXE、補正用パラメータ
(グリッドにおける補正量をテーブルにしたもの)、補正手順が国土地理院から公開されている。
(日本における) NRTKサービスで送られてくる基準局座標も
(測量ユーザが多いという理由もあり) 測地成果2000基準なので
(どうもVRS点については独自補正しているプロバイダもある様)
WGS84やITRFとは大きいところで既に数10cmのずれがある。これらの問題は公開された補正用パラメータを使って変換/逆変換すれば解決できる。ということで多分今後要望が出ると思うのでRTKLIBにも補正機能入れるかな。
-------------------
昨日のRTKLIB 2.3.0のダウンロードは1日で1200件を超えた。ありがたいことである。バイナリパッケージのサイズが妙にでかいなあと思ったら古いマニュアルを含めていたせいだった。これはいらないので次版から削除しよう。
....................................................................................................................................
RTKLIB 2.3.0 is released. Enjoy RTK !!
RTKLIB: An Open Source Program Package for RTK-GPS/GNSS
....................................................................................................................................
RTKLIB 2.3.0引き続き。
コードを仮凍結して試験中。beagleboardで正常に測位できない問題点が出たので調べたらgps
weekのrolleover問題だった。beagleboardはバッテリバックアップしたカレンダクロックを持っていないので、cpu時刻がずれてgettimeofday()で日時をとって判定しているgps
week rollover処理が誤動作を起こしていた。とりあえず日時がweek
1560 (2009/12/1) より小さければcpu時刻異常としてweek
1560の近くに丸めることにした。これでカレンダクロックが異常なcpuでも現在を中心に±
10年くらいのデータは問題がでないはず。いずれにしても初期GPSの設計者がビット数をケチったことでみんな苦労している。
補足: ついでに書くとRTCMのメッセージ設計もなっていない。RTCM2の場合は1日、RTCM3の場合でも7日の時刻のambiguityをメッセージのみから解くことができない (一応、時刻用メッセージもあるが普通使われていない)。RTKCONVではしかたないので変換時にユーザに入力してもらう様にしたが、明らかに操作性が悪くなっている。受信機のrawデータ型式にも同じような問題を抱えているものが多い。(19:48追記)
....................................................................................................................................
SpaceFlight Now, Proton launchs three Russian navigation satellites, December 14, 2009
2009/12/14 10:38UTC, 3機のGLONASS-M衛星,
カザフスタンのバイコヌール宇宙基地からプロトンMロケットで打ち上げ成功。これで軌道上のGLONASS衛星は全部で22機 (うち1機はDecommission中)。次回3機の打ち上げは来年2月に予定されている。
-------------------
RTKLIB 2.3.0引き続き。
RTKLIB 2.2.2は移動体のFix率が市販RTK受信機に比較して悪いという問題点があった。これは生データと受信機のRTK解を両方送っていただいて初めて分かったことなのだが。これらを分析して色々な改良を加えた結果、リアルタイム解でも概ね最新受信機と同等程度に改善できたのではないかと思う
(当然、後処理ではRTK解より良い) 。これらの分析から最新RTK受信機の内部アルゴリズムがおおよそ推測できるのだが、もうあまり改善の余地は残っていないのではないかと思う。
-------------------
本日のGLONASS-Mトリオの打ち上げは10:38UTC (19:38JST) の予定。ライブ中継はここで見られるよう。
....................................................................................................................................
http://www.federalspace.ru/main.php?id=2&nid=8553
12/14にGLONASS-Mを打ち上げるプロトンロケットの写真。
-------------------
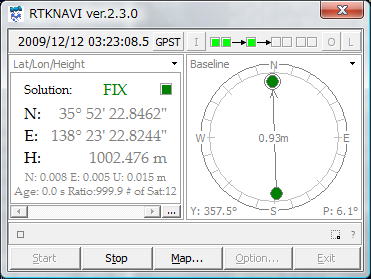
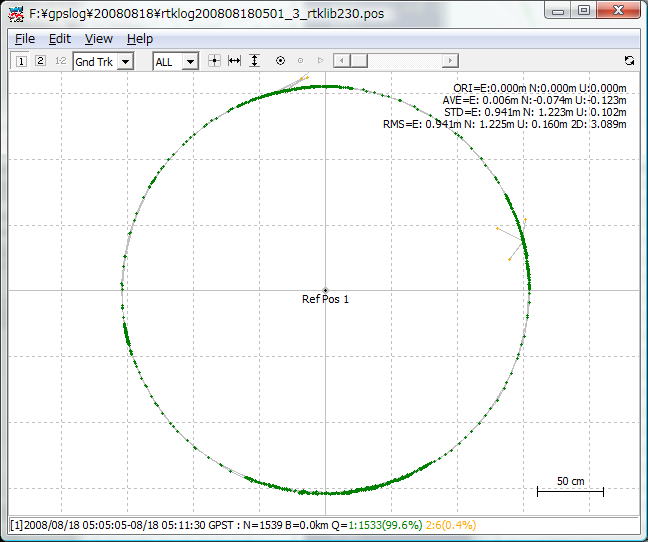
RTKNAVI 2.3.0による姿勢計。
....................................................................................................................................
RTKLIB 2.3.0では地味な改良も色々と入る予定。例えば2.2.2ではストリームライブラリのTCPサーバは1クライアントとの接続しか出来なかったのだが、複数TCPクライアント対応になる。これを使うとSTRSVRでNRTKのデータを受けて分配することにより、複数ローバRTKが可能になる。これは次の次の次くらいに実装したいと思っているネットワーク解 (複数基線RTK) 対応に向けての布石でもある。実はRTKサーバスレッドは何個でも自由に起動できるので、基線毎にRTKスレッドを立ち上げて解を統合するコードさえ書けば、今でもネットワーク解対応は簡単なのだけど。CPU負荷の問題はあるけど1Hzなら普通のPCで数100基線位は問題なく動くはず。
-------------------
"Fix and Hold" モードの長基線解で解が不安定になる原因が判明。原因はmis-fixだった。"Fix and Hold" モードを実用的にするためにはmis-fix検出の信頼度 (すなわちAR Validationの信頼度) を上げる必要がある。やはりratio-testのみでは限界がある。ということでrtkpos.cをまた大幅改造中。この調子で月末までにコードが収束するのかね。
....................................................................................................................................
RTKLIB 2.3.0引き続き。ご要望のあった外部ジオイドモデルのサポート。以下は八丈島の緯度, 経度: RTKLIB内蔵ジオイド, EGM96, EGM2008(2.5"グリッド), EGM2008(1"グリッド), GSIジオイド2000 (m)。内挿はバイリニア。RTKLIB内蔵ジオイドはEGM96(15"グリッド)を単に1度グリッドに間引いたもの。EGM96とEGM2008の差は概ね数10cm以内の様だが最大で8m以上差が有る地域が存在する。EGM96は場所によっては精度が悪い所がある様だ。
33.120 139.797 : 43.0375 42.2538 43.0299 43.0248 43.8815
補足: 確認のためオンラインジオイド計算結果: UNAVCO: 43.170, GSI: 43.881, NGA: 43.18 (12/11追記)
覚書: EGM2008のグリッドデータファイルには1レコード (等緯度データ1式) の前後に1ワード (4バイト) の0値が挿入されている。これが分かるまでちょっとてこずった。documentに記載がないので多分変換プログラムのバグではないかと思うのだが利用する方は注意。
-------------------
これは教えてもらったのだけど、NovAtel受信機のログにPASSCOMというのがあって、これはポートから入力したメッセージをそのまま別のポートに出力するだけのパススルー機能である。ただありがたいのは出力時に受信機クロックでタイムタグを付けてくれること。受信機クロックは非常に正確なわけで、タイミングの絶対時刻計測をしたい場合この機能を使うと簡単に実現できる。実は、この機能を使ってNovAtel - RTKNAVI によるRTKのレイテンシを測ってくれたのだけど、大体0.5s 位かかっている様。予想されるよりちょっと遅いので原因を再度問い合わせ中。
....................................................................................................................................
RTKLIB 2.3.0引き続き。Moving-Baseモードがちゃんと動く様に色々改良。2.2で受信機時計差の補正を入れたと思っていたのだけど、実はちゃんと働いていなかったことが判明。ということで、2.3.0は1周波姿勢計用にもそれなりに使えるようになる予定。
....................................................................................................................................
RTKLIBのダウンロードが6000件を超えて、ある程度予想されたことなのだけど、RTKの性能でない、という問い合わせがだんだんと増えてきた。特にv.2.2.2ではQCのパラメータを良いアンテナや良い周囲条件を前提に決めているので、悪条件のせいでデータがリジェクトされて解が出力されないというケースも多い。ということで何度か書いていると思うがRTKの性能を出すためにはまずは周辺環境
(オープンスカイ、マルチパスがほとんどない)、次にアンテナ
(できれば高性能、低価格でも最低グランドプレーン)、最後に受信機。
なお、好条件でも移動体では1周波では実用にならないと思ったほうが良い。現状では移動体RTKは2周波高性能アンテナ+受信機でアプリケーションを選んでなんとか使えるかどうか微妙、というのが実情。これは5年後に衛星数が倍増するのを待つしかない
(シミュレーションではGalileoが入れば1周波で現在GPS
2周波で得られているのとほぼ同じ性能が得られる)。
過度の期待を持ってu-blox 2台買ったんだけど全然使いものにならないじゃないか、という人が今後多くなりそうなので以上あえて書いておく。
補足: 基線長も重要だった。ということで性能に効く順位は (1)周辺環境、(2)基線長、(3)アンテナ、(4)受信機、ということにしておく。(12/15追記)
....................................................................................................................................
RTKLIB 2.3.0引き続き。"Fix and Hold" モードの試験をしているのだが、たまに数値不安定が出るのと長基線解が安定しない。あと1周波移動体でmis-fixした後の正常復帰が難しい (これは予想していたところ)。スリップ検出の信頼性も重要なのでドップラによるスリップ検出も追加。いずれもRTK解析エンジンの部分なので従来コードに影響を与えない様に慎重に直さなければいけないので効率が悪い。コードもどんどん複雑化しておりrtkpos.cは1300行を超えた (2.2.2は約800行)。
....................................................................................................................................
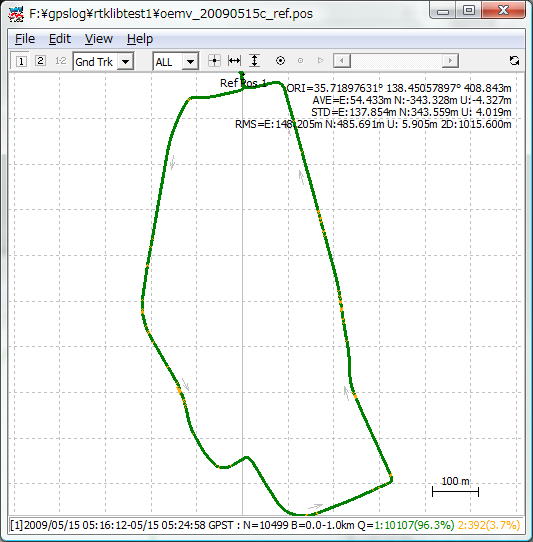
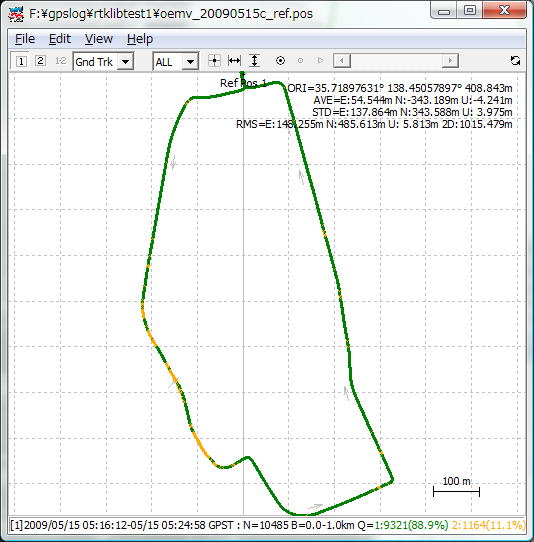
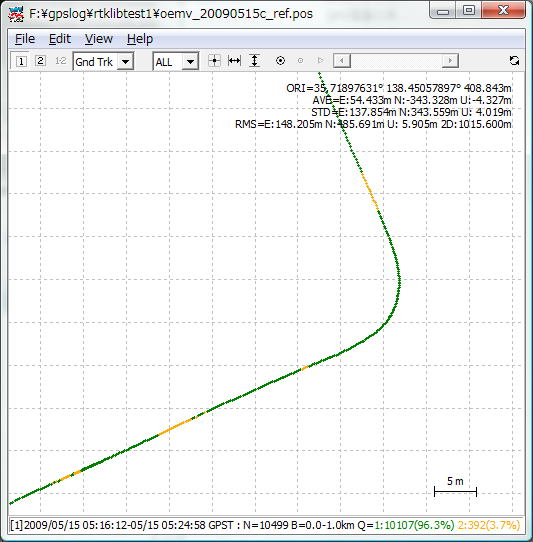
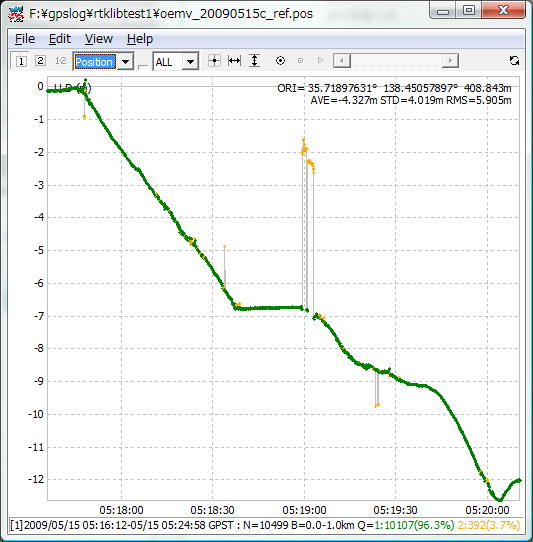
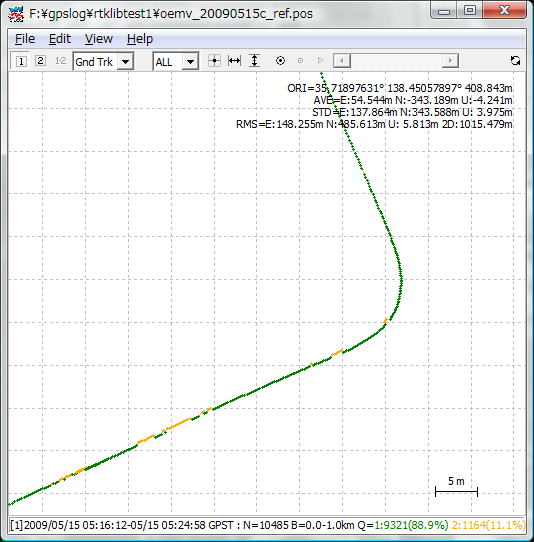
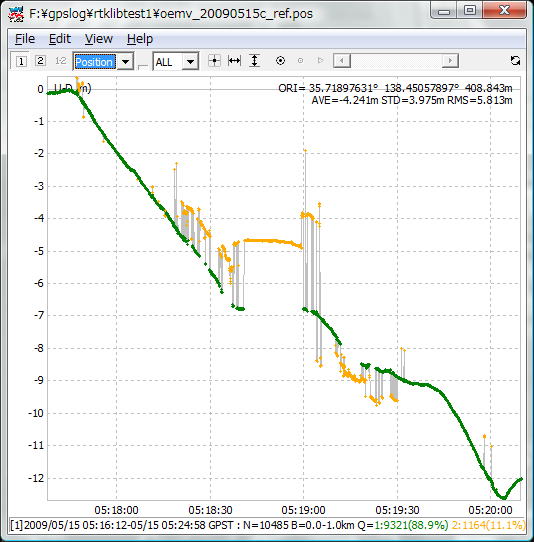
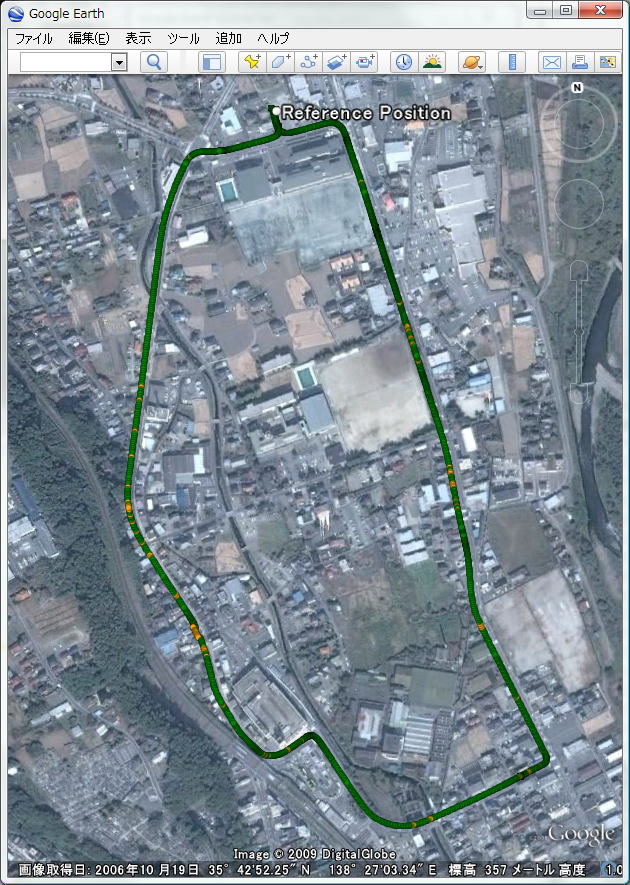
v.2.3.0用に新設した"Fix and Hold" モードでambiguityを解いた結果 (左) (拡大、上下)、従来の"Continous" モード解 (右) (拡大、上下)。韮崎市の市街地走行データの後処理KGPS解。OEMV+GPS-702-GG。基準点はVRS。田舎なので周りに高いビルがあるわけではない (Google Earth) が、これくらいの環境ならなら移動体でも有る程度実用的といえるのではないかと思う。
....................................................................................................................................
http://www.tvroscosmos.ru/frm/video/start62.php
次の3機のGLONASS-Mはいつものクリスマスではなく12/14打ち上げ予定とのこと。
....................................................................................................................................
RTKPOSTの長基線解の性能が出ないのだけど、と質問を受けたのでちょっと解析。1月 (左)、7月 (右) のそれぞれ1週間分。基線はGEONET 2110-0601 (基線長=250km)。RTKLIB 2.2.2, Kinematic, L1+L2, Combiined, ElMask=15deg, Iono/Trops Est=ON, Sat Eph=Precise (IGS Final), Minimum Elevation to Fix Ambiguity=25deg, Antenna Model=none, 基準局は2009/1/1のF3解に固定し結果を同様にF3解と比較した。ちょっと水平オフセットが出てる原因は不明。やはり夏は特に解の上下雑音が増える。これはZWDのプロセスノイズを季節に合わせて調整した方が良いかも。長基線解でFix率を上げるコツはMinimum Elevation to Fix Ambiguityを少し上げることである。お試しを。
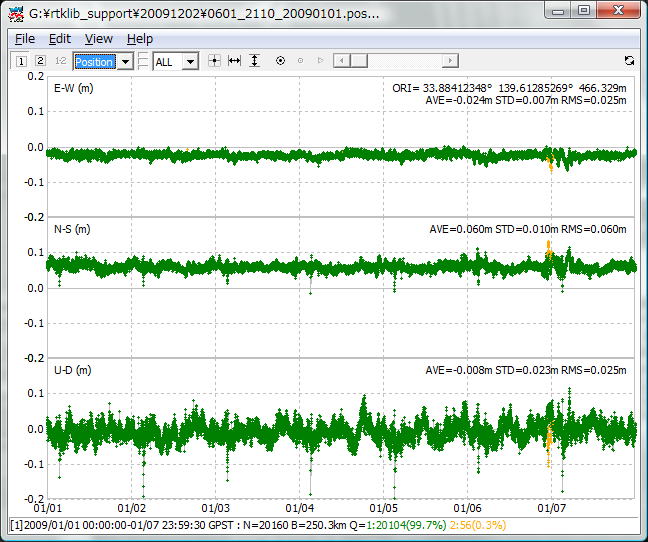
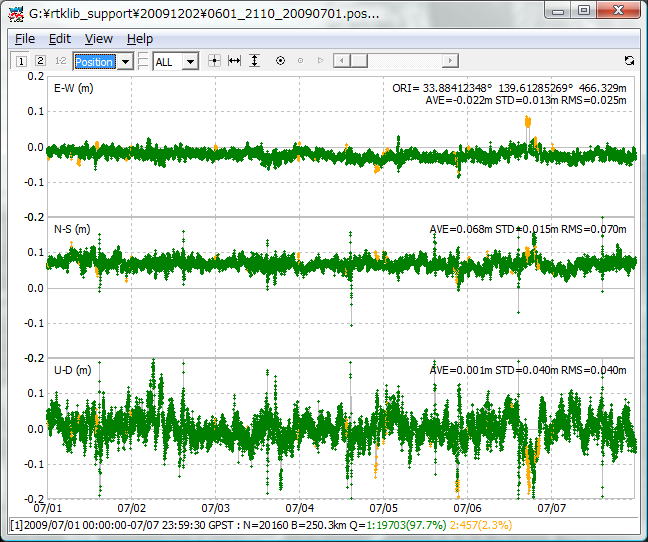
なお、移動体解のFix率を上げるため "Fix and Hold" モードというInteger Ambiguity Resolutionオプションを2.3.0で新設する予定なので、それを使えば以上の様な細工は必要なくなるかも。これは一度FixしたAmbiguityをその後その値に強く拘束をかけるオプションである、プログラム構造が結構複雑になるので導入を躊躇っていたが行けそうなので2.3.0で入れる予定。
-------------------
GPS World, The System: Galileo Removes Manufacturing
Barrier, December 1, 2009
Galileoの受信機製造ライセンスについて書いているのだけど既報以外の情報は無い。
> the European Union (EU) will rescind
its requirement for a special license to
> manufacture and sell Galileo receivers.
もしかすると"special license"は必要ないけどやっぱり"license"は必要、という落ちなのかもしれない。
-------------------
RTKLIB v.2.3.0リリースに向けて色々と評価。
最近データを送って頂ける方が増えてきて大変ありがたい。特に市販RTK受信機のRTK解や市販後処理基線解析解を同時に送って頂くと、今後のRTKLIBの性能向上だけでなく現在のRTK技術の水準を知るためにとても参考になる。誰か移動体のTrimble TTC解送ってくれないかなあ。
....................................................................................................................................
GPS/GNSSシンポ2009から帰還。測位航法学会のお披露目を兼ねた大会だったが、プログラム内容もバラエティに富んだ、技術的にも面白い大会であったと思う。これを機に測位航法学会へ入会される方が増えて日本でもこの分野の研究開発が今後いっそう盛り上がれば良いと思う。
-------------------
11月末現在のRTKLIBのダウンロード数をまとめておく。gizmodeの記事の影響もあってか2.2.2のフル、バイナリパッケージを合わせて6000件を超えた。
-------------------
ublox, Release Notes u-blox 5 Firmware Version 6.02, November 23, 2009
LEA-5T F/W 6.02がでた様。これは教えてもらった。情報感謝。確認していないが、多分carrier-phase
anomalyの問題点が解決されているのではないかと思う。相変わらずユーザupdate用F/W
imageは提供されていない。又聞きの未確認情報だが、エバキット
(EVK-5T) はメーカに送るとF/W updateしてもらえると聞いた。なお本件については直接ublox社に問い合わせ下さい。
....................................................................................................................................
| Home | by T.Takasu |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}