|
日記・備考録 |
2004 | 2005/1 2 3 4 5 6 7 8 9 10 11 12 | 2006 |
| November | December 2005 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
January | Home |
.....................................................................................................................................
完全な年末モード。大掃除、年賀状書き、買出し。
ここも最初に比べるとずいぶんと人が訪れてくれるようになった。ほとんど技術メモの殴り書きに過ぎないこの備考録も見てくださる方がいる様で感謝します。今年は仕事面ではなかなか良いことがなかったが来年は地道な蓄積が少しずつでも花開く事を願っています。皆様良いお年を。
.....................................................................................................................................
LAMBDAのC-mex化。LAMBDAそのものが相当に効率の良い検索を行うのでバイナリ化しても全体としてはあまり速度に差は出ない。m-file版とC-mex版LAMBDAの実行時間をmatlabのprofileで計測した結果。細かい操作が多いのでLAMBDA単体の実行時間では2桁以上の差がある。
| コード | m-file | C-mex | 条件 |
| 1回当たり実行時間 | 0.01577sec | 0.00004sec | 単基線/L1+L2, Matlab6.5.1, P4 3.2GHz |
.....................................................................................................................................
論文、その他リンク
Proceedings of the 18th International Technical
Meeting of the Satellite Division of The
Institute of Navigation, ION GNSS 2005
9月に開催されたION GPS/GNSSの講演論文集CD-ROM届く。IONメンバ$140也。興味のある分野の論文のみざっと眺めるがめぼしいものはあまりない。でもGPSの研究動向を概観するには良い。世界も大したことないと思ってしまうのは不遜に過ぎるか。
U.Hugentobler, CODE high rate clocks, IGS-MAIL-4913, 06 Apr 2004
CODEは2004/4に30秒間隔の衛星時計を提供開始している。このメールを見る限りこの時計は5分間隔時計を多数局(90~120局)の搬送波位相時刻差により補間し生成しているらしい(phase-consistent
interpolationと呼んでいる)。当然基になる時計はCODE時計を使用しているはずでIGS
Finalを使えばもっと高精度の30秒時計が得られるはず。また1秒観測データを使えば高精度1秒時計も容易に生成できるだろう。この辺のアルゴリズムの詳細を書いた論文ないかな。なお30秒時計を補間で求めているのは多分計算機処理能力の問題だろうと思う。CODEの様に150局程度のデータを使って数千の未知パラメータを30秒間隔で推定するのは現在の計算機の性能では厳しい。(ただ推定時間間隔は単純にlinearに効くだけなので現在の並列化技術を使えばそれほど問題にはならないとも言える。ただ解析ソフトをちゃんと並列化計算機対応する必要がありここがネックになるかもしれない)
これはStarFireの様なGDGPSにおけるリアルタイム軌道・時計推定が技術的に難しい一つの理由でもある。
G.Gendt, Switch the absolute antanne model within
the IGS, IGSMAIL-5272, 19 Dec 2005
IGS解析におけるアンテナモデル変更に関する決定事項。ANTEXアンテナモデルやSINEXやSP3への使用したアンテナモデルの記述方法。新アンテナモデルへの移行は座標系のITRF2005への切り替え(2006
4-5)と並行して行うとしている。以前のメールでは2006/1/1に移行するとしていたが少し延びた様だ。
.....................................................................................................................................
ウチの中が年末モードに入り落ち着いて仕事が出来そうにもないので一旦休止。とりあえず机の周りの整理から。
.....................................................................................................................................
まだGT-RTKのサイクルスリップ関係。なかなかビシッと決まらない。こっちが良ければあっちが立たずといった感じ。少し飽きてきたのでLAMBDAのC-mex化。
.....................................................................................................................................
GT-RTKのサイクルスリップ関係引き続き。
サイクルスリップ時に大きく位相バイアスが飛ぶと測位解がそれに引きずられ全事後残差が大きくなる。そうすると事後残差検査で多くの観測データが捨てられ測位精度が悪化する。これを防ぐため事後残差に加え事前残差検査を追加しやっとうまく動く様になった。後は十分収束していないバイアスを含めてFIXしようとするとそれに引きずられて一時的に全バイアスがFIXしなくなる問題。これを防ぐためには再初期化したバイアスは一定時間FIX解計算には使用しないようにする。(これは新しいアーク開始時も同じ)。次に基準衛星データ欠落時に全二重差データが欠落し測位が出来なくなる問題の対応。これには基準衛星選定アルゴリズムの改良が必要。測位計算も基本は難しくはないがこの手の細々した問題の対策がどうしても複雑になる。これらの問題は論文や参考書で触れられることはまれで実装にまかされている部分。綺麗にまとめにくい大変難しい部分である。
.....................................................................................................................................
どうも測量屋さんの使う言葉には馴染めない。"網平均"とか"偏心"とかいかにも明治時代に英語をそのまま日本語訳したような用語が多い。まあ長い歴史と文化があるのだとは思うのだけれど。ところで"網平均"は"もうへいきん"が正しい? それとも"あみへいきん"?
GT-RTKのサイクルスリップ関係をシコシコ。なかなか思い通りに動かない。
.....................................................................................................................................
論文、その他リンク
T.Pany et al., A High-Bandwidth GPS L1/L2 C/A Code Software
Receiver for Real-Time Kinematic (RTK) Positioning, ?
ipexSRと呼ぶソフトウェア受信機。Dr. Panyはこの前のGPS/GNSSシンポでソフト受信機の講演をしたオーストリアの若手研究者である。RTKモジュールはカルマンフィルタ+LAMBDA。電離層推定も入っている。スリップはまず信号処理部でまず検出し、再度事後残差テストでチェック
(これをdata snoopingと呼んでいる) Ambiguity再初期化を行っている。RTKではこれが普通のやり方なのかもしれない。
.....................................................................................................................................
リアルタイムサイクルスリップ検出・補正の調査。RTKの場合、後処理解析で一般的なGF+MWは使えない。これは擬似距離マルチパスのせいで誤検出が多くなりすぎるから。従って搬送波位相だけでスリップ検出しなければならない。やりようは色々あるが上手く行くかは実際にやってみないと分からない。一般にはどう処理するのが普通なのかを調査。
12/11の備考録で近隣基準局の電離層推定値の補間値を使って電離層補正することを書いたが、ゼロ差GFを使った電離層推定値には(擬似距離バイアス以外に)擬似距離マルチパスによるバイアスが残るため補正が上手く行かない様だ。そうすると基準局間二重差で電離層推定しAmbiguity
FIXしてバイアスを除去しゼロ差に分解してから補間しなければならない。これは相当に面倒。ネットワークRTKもなかなか一筋縄ではいかないようだ。
.....................................................................................................................................
12/16の表の追加。PCV補正(受信アンテナ位相中心オフセット+変動)をOFFにした場合の影響。同一機種アンテナならば300km基線くらいまではPCVも無視できるようだ。
| 測位点 | 基線長 | 基準 * | PCV補正 OFF |
||||
|---|---|---|---|---|---|---|---|
| RMS誤差(cm) | RMS誤差(cm) | ||||||
| E | N | U | E | N | U | ||
| 940041 いわき | 131.4km | 2.7 | 2.6 | 5.0 | 2.7 | 2.6 | 4.9 |
| 940032 酒田 | 310.4km | 2.6 | 2.7 | 5.3 | 2.6 | 2.6 | 5.3 |
| 940022 函館 | 637.3km | 2.9 | 1.9 | 6.0 | 2.9 | 2.2 | 6.0 |
| 940001 稚内 | 1040.7km | 3.1 | 2.5 | 4.9 | 3.3 | 2.9 | 4.9 |
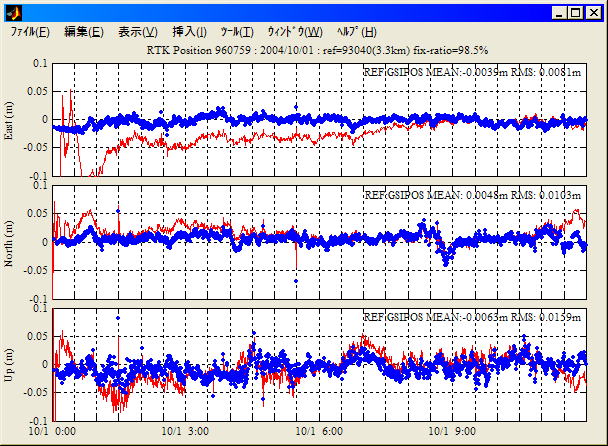
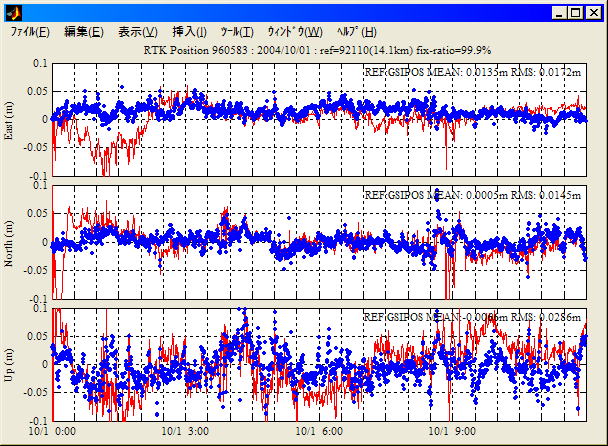
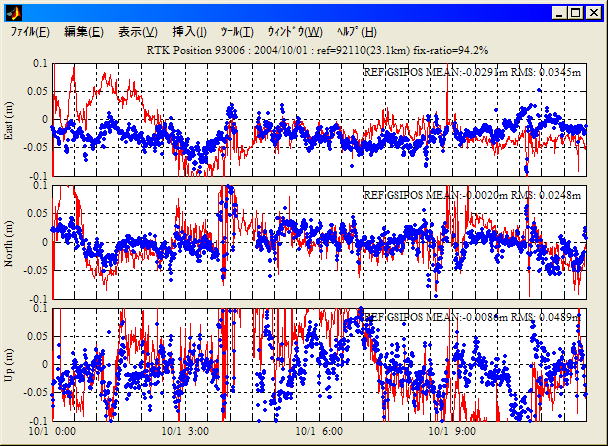
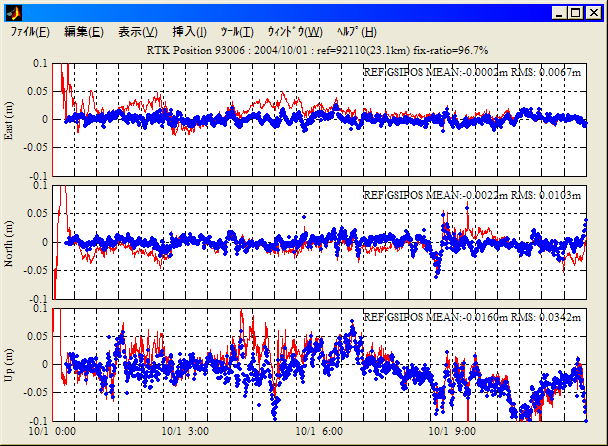
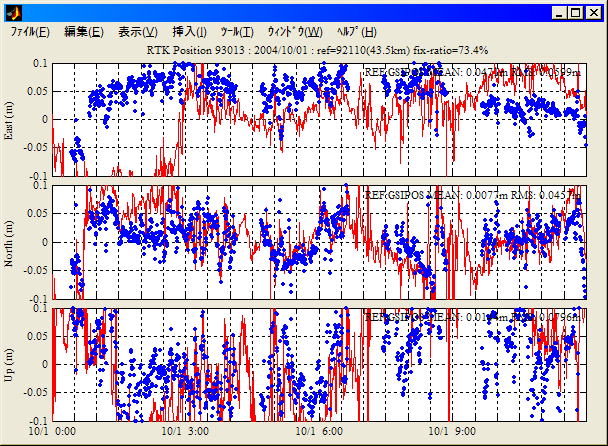
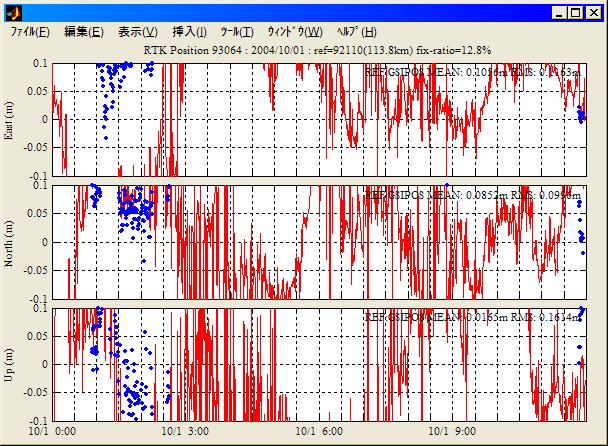
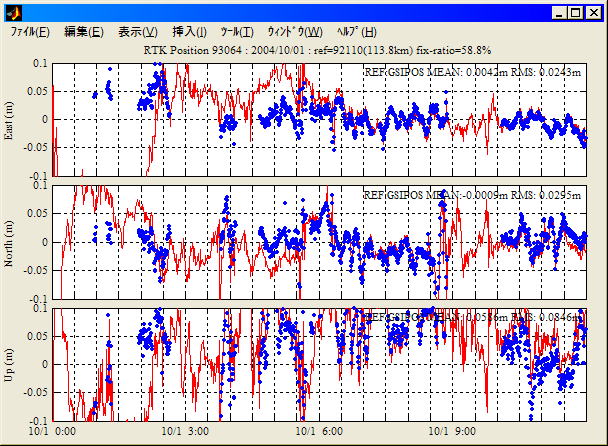
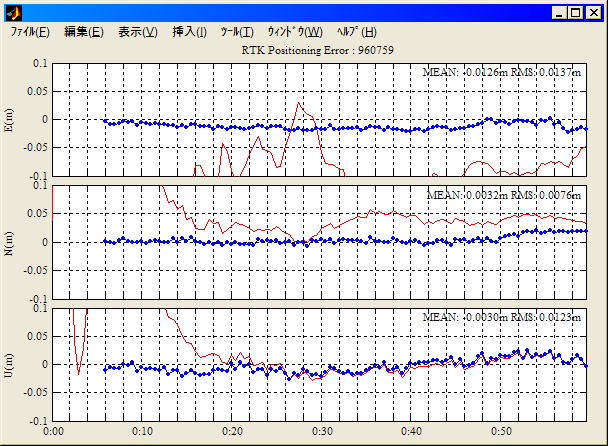
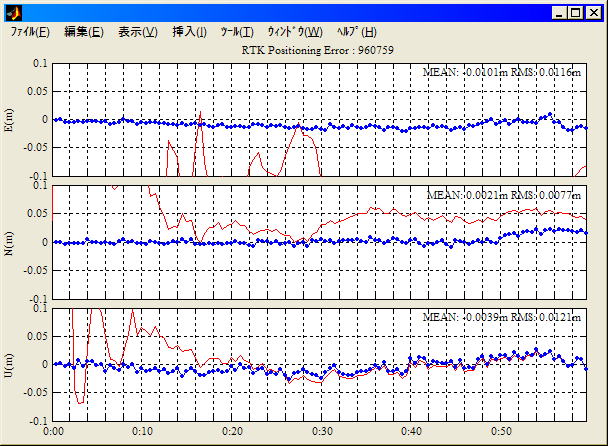
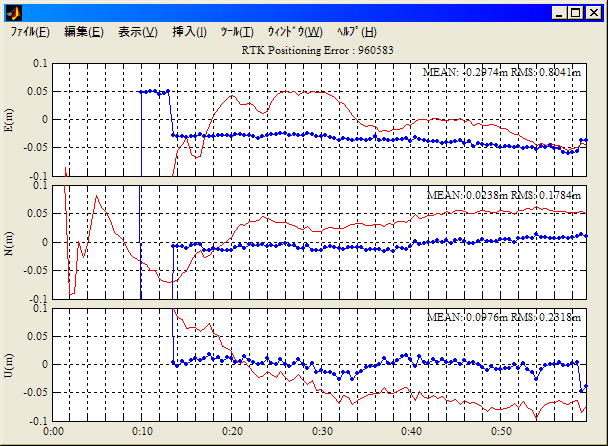
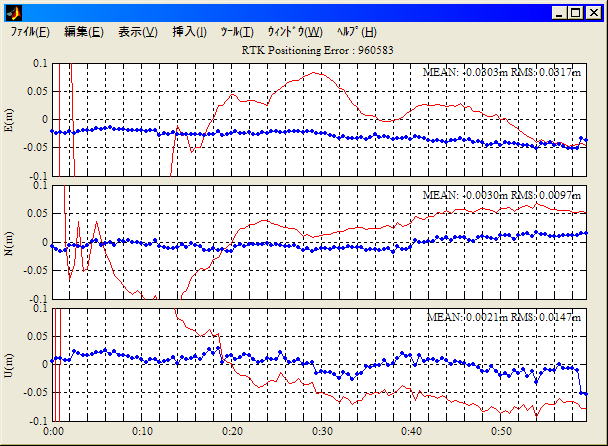
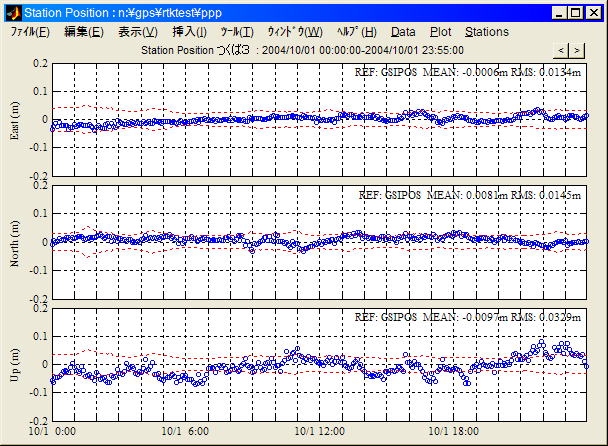
GT-RTK(仮称) ver.0.0.1測位精度評価結果。現バージョンでは対流圏遅延は入れたがまだ正常に推定できない。衛星切り替えの確認のため少し長いセッション(12H)。やはり電離層推定を入れると初期化時間がかかる。また電離層を入れても40km以上の基線では精度が落ちる。これは主に対流圏の影響と思われるので100km超基線での課題。なおARはinstantaneous
AR所謂epoch-by-epochではない。epoch-by-epochにするともっと測位率が落ちる。長基線/ロングセッションではFLOAT解とFIX解の差が縮まるので電離層フリー解と精度は変わらなくなってしまう可能性もある。
| 測位点 | 基線長 | 電離層推定なし | 電離層推定 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RMS誤差(cm) | 測位率 | グラフ | RMS誤差(cm) | 測位率 | グラフ | ||||||
| E | N | U | E | N | U | ||||||
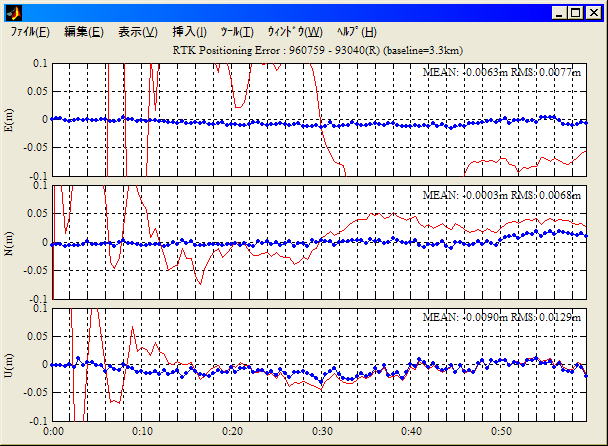
| 960759 三浦2 | 3.3km | 0.6 | 0.8 | 1.6 | 100.0% | * | 0.8 | 1.0 | 1.6 | 98.5% | * |
| 960583 石下 | 14.1km | 1.7 | 1.5 | 2.9 | 99.9% | * | 0.7 | 1.0 | 2.5 | 97.6% | * |
| 93006 出島 | 23.1km | 3.5 | 2.5 | 4.9 | 94.2% | * | 0.7 | 1.0 | 3.4 | 96.7% | * |
| 93013 大宮 | 43.5km | 6.0 | 4.6 | 8.0 | 73.4% | * | 1.2 | 1.5 | 5.7 | 94.4% | * |
| 93064 山梨大月 | 113.8km | 11.6 | 10.0 | 16.1 | 12.8% | * | 2.4 | 3.0 | 8.5 | 58.8% | * |
(本解析には国土地理院電子基準点データを使用しました)
.....................................................................................................................................
年末でいろいろとせわしない。しかし寒い。午後2時の気温で-2.8度。一日休養。
.....................................................................................................................................
昨日の評価で対流圏をモデル補正した結果の精度が悪すぎる気がするのでちゃんと補正できているか再度確認中。
.....................................................................................................................................
論文、その他リンク
P.Jonge et al., The LAMBDA method for integer ambiguity estimation:
implementation aspects, LGR-Series Publications of the Delft Geodetic
Computing Centre No.12, 1996
LAMBDAの実装に関する丁寧な解説。これさえ読めば誰でもプログラムできるだろう。Teunissen(のグループ)の功績は理解しにくい整数最小二乗理論を測位の世界に持ち込み分かりやすい普及活動を行ったことではないか。
長基線RTKのために少し実験。GTを使ってキネマティック測位で各種補正がどれくらい効くか確認。ただし現行GTはまだ電離層推定, 2周波分離モデル, AmbiguityFIXに対応していないので電離層フリーで2pass+smootherの結果を示した。なおPPPの結果も併記した。
| 測位点 | 基線長 | 基準 * | 軌道= IGU(予報値) |
軌道= 放送暦 |
対流圏= モデル |
局位置変動 OFF |
PhaseWindup OFF |
戦略=PPP 300秒間隔 |
||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMS誤差(cm) | RMS誤差(cm) | RMS誤差(cm) | RMS誤差(cm) | RMS誤差(cm) | RMS誤差(cm) | RMS誤差(cm) | ||||||||||||||||
| E | N | U | E | N | U | E | N | U | E | N | U | E | N | U | E | N | U | E | N | U | ||
| 940041 いわき | 131.4km | 2.7 | 2.6 | 5.0 | 2.7 | 2.9 | 5.0 | 3.1 | 2.7 | 5.2 | 6.9 | 4.5 | 24.6 | 2.7 | 2.6 | 5.1 | 2.7 | 2.6 | 4.9 | 2.0 | 1.6 | 4.9 |
| 940032 酒田 | 310.4km | 2.6 | 2.7 | 5.3 | 2.5 | 3.0 | 5.4 | 3.6 | 3.6 | 4.4 | 6.0 | 5.9 | 22.2 | 2.6 | 2.5 | 5.4 | 2.6 | 2.7 | 5.3 | 1.7 | 1.7 | 5.4 |
| 940022 函館 | 637.3km | 2.9 | 1.9 | 6.0 | 2.9 | 3.5 | 6.3 | 2.1 | 6.0 | 5.0 | 12.1 | 9.0 | 35.7 | 2.8 | 2.0 | 6.4 | 2.8 | 1.9 | 6.0 | 2.1 | 1.7 | 4.6 |
| 940001 稚内 | 1040.7km | 3.1 | 2.5 | 4.9 | 2.8 | 2.7 | 5.1 | 6.4 | 12.2 | 7.9 | 14.9 | 11.5 | 35.7 | 3.1 | 2.4 | 6.5 | 3.0 | 2.5 | 4.9 | 2.1 | 2.0 | 6.4 |
これを見ると基線長100kmまでは軌道は放送暦で十分。それ以上では精密暦が必要。対流圏は100km基線でもZTD推定しないと精度がかなり落ちる。局位置変動やphase windupは長基線でもあまり効かない。なお長基線ではDDはPPPに比較し少し精度が落ちる。多分長基線ではDDはAmbiguityをFIXして複数基準局を使わないとPPPに対抗できない。このケースではGTはかなりPPPに最適化しているのでそれも関係しているかもしれない。
.....................................................................................................................................
長基線対応RTKプログラムの実装。基準衛星切り替えがやっとちゃんと動くようになった。これから対流圏推定、精密暦対応を追加。
.....................................................................................................................................
連続観測点の精密測位であれば初期化時間はあまり問題にならないので(ネットワークRTKでない)長基線RTKでも十分使用できる。初期化時間の問題はサイクルスリップの回復だが連続観測点の場合全搬送波位相測定値が同時にスリップすることはまれなのでその測定値のみ初期化すればいいだろう。リアルタイムサイクルスリップ修復は課題だがやって出来ないことはない。ただし数百km以上の超長基線になると軌道はIGU予報値、対流圏推定や各種精密補正も入れないといけない。RTKは短基線で使われることが多いので多分電離層、対流圏推定や精密補正に対応したRTKソフトは存在しないのではないか。長基線RTKを使えばリアルタイム地殻変動監視、津波監視、地震波計測等が可能になる。ということで長基線RTKはまだ開拓されていない分野である。ということでやる気が湧いてきた。
論文、その他リンク
奥田他, キネマティックGPS解析ソフトの精度評価-海底地殻変動観測に向けて, 2004
StarFire, RTDの精度比較。StarFireの原理はRTK-PPPであるが衛星軌道/時計品質が良くないせいかあまり精度が出ていない。現行のリアルタイム軌道・時計推定技術はまだ十分でないし困難も大きい。RTDは15km,
30km基線では悪くないが90kmでは精度が落ちる。90km基線での瞬時FIXは多分無理なので結果はFLOAT解だと思うがそれなりの精度が出ているのは電離層を推定している可能性がある。これを見ると30km基線でもRTDはネットワークRTKと勝負できる。だだ少しRTDの上下精度が悪いのは何故だろう。
.....................................................................................................................................
論文、その他リンク
東京大学教養学部統計学教室編, 基礎統計学III 自然科学の統計学, 東京大学出版会, 1992
整数不定性決定理論をキチンと理解するためには統計学の基礎が必要である。論文読んでいてもF-DistributionやらHypothesesやらの用語で引っかかって先に進めない。と思って本棚を探していたら出てきた。でも何時買ったのかも覚えていない。完全な泥縄ではある。
昨日リンクのOdijkの論文を全部プリントアウトしてざっと読む。RTKに関してこれから評価しようと思っていたことが殆ど綿密に検討されていることにへこむ。ネットワークRTKの実評価もしている。もうやることないじゃんという感じ。現行のVRSなりFKPには既にこれらの技術が取り入れられているだろうことを考えると、これからそれらに勝つのは簡単ではないだろう。こういうのを読んでしまうとモチベーションの維持が難しい。世界は広い。
D.Odijk, Improving ambiguity resolution by applying
ionosphere corrections from a permanent GPS
array, Earth Planets Space, Vol.52, pp.675-680,
2000
OdijkがEPSに書いているのを見つけた。これで5年前。現在のRTK技術では短基線で瞬時FIX(初期化時間=0)は当然。中長基線で基準局網を使ってどこまで瞬時FIX率を上げられるかが課題。どうも最新技術動向をちゃんと捉え切れていなかった様だ。
中基線以上(20km~)でネットワークRTKと比較し従来型(単独)RTKが測位率・精度共にダメダメといった評価結果を見ることがあるがこれは従来型RTKにとって公平な評価でない。これは使ったRTKソフトが短基線用だというだけのことである。従来型RTKでも中長基線用に電離層推定を入れればちゃんとFIXするし精度も出る。ただし初期化に30分はかかる。その差にネットワークRTK利用料の価値があるかどうかは利用者の判断である。
上記を書いてから良く考えたら現在は中長基線に対応したちゃんとしたRTKソフトがないのではないかと気が付いた
(だから近くに仮想基準点を作らないといけない)。ないということは作れば商品価値があるということ。少しやる気が湧いてきた。
.....................................................................................................................................
論文、その他リンク
J.Wang et al., A comparative study of the integer ambiguity
validation procedure, Earth Planets Space, Vol.52, No.10, pp.813-817,
2000
整数不定性検定手法の比較。整数不定性検定は一般には最適解と次善解のF-ratioを使う。F-ratioとW-ratioと呼ぶ係数を使った検定との比較を行いW-ratioが良い場合があるとしている。
RTKプログラムの衛星切り替え等実用部分の実装。せっかくのシンプルで美しいプログラムがどんどん汚くなっていく。
論文、その他リンク
D.Odijk, Fast precise GPS positioning in the presence
of ionospheric delays, 2002
全264頁(2.94MB)。中長基線の高速精密測位への電離層の影響とその対策。緻密で膨大な論文。これは凄い。RTKの分野も調べ始めると世界的にはやり尽くされているのかもしれない。筆者はTeunissenが長を務めるオランダMGP(Mathematical
Geodesy and Positioning)の研究者の様。MGPのWebサイトにも各種論文を始め膨大な情報がある。
.....................................................................................................................................
電子基準点間基線長。離島を除くと北海道で60.4kmというのが最長。ということは日本では概ね40km基線に対応できれば十分ということになる。これは電離層推定をしないでも補正だけでいい可能性がある。補正でよければFIXはずっと速い。
さて電離層補正であるがLIM等のモデルを入れてもいいがRTK補正用には単純に衛星-基準局毎のスラント遅延推定値が有ればよい。測位点の遅延は近隣3局推定値を使った線形補間で求める。スラント遅延のリアルタイム推定はLGとカルマンフィルタを使えば簡単。十分な時間があれば4mm精度で求まる。ただし推定値には擬似距離バイアス(DCB)が乗ることに注意。これは2重差を取れば消えるが補間係数に同一値を使わないと誤差要因となる。補間誤差は電離層遅延空間変動2次以上項が効くことになるが40km基線では通常は5cm以下に収まる可能性が高い。なおこの5cmは瞬時FIXに必要な大体の補正精度で可視条件等で変わるので実際には評価してみないといけない。FIXしてしまえば(2周波で電離層は除去できるので)あとは対流圏、衛星軌道等が精度に効くことになる。対流圏推定は厄介なので簡単なモデル補正で済ませたいが精度が出なければ準リアルタイム推定を入れる必要がある。軌道については放送暦で精度が足らなければIGU予報値を使えばよい。それから移動体ではアンテナ方向が変動しphase-windupが効くのでその補正にはジャイロが必要になる。その他の精密補正はモデルを使うだけなので容易である。あとは補正データ送信方法とデータ量削減。移動体用には2wayは使いにくいので1wayで行きたいが放送型だとデータ量が莫大になるのでここは色々と検討の余地がある。
ということでGEONETリアルタイムデータを使えば、瞬時FIXすなわちサイクルスリップフリーで1cm精度の移動体用ネットワーク型RTKを構築出来そうではある。あとは2周波測量級受信機/アンテナが小型軽量で安くなれば結構需要はあると思うのだが、誰か買いません。
.....................................................................................................................................
昨日RTK評価その7の補足。電離層はスラント遅延二重差をランダムウォークで推定。擬似距離測定値を入れないと電離層推定は収束しない。80km基線の結果を見ると系統誤差として効いているのは殆ど電離層。100km程度まではその他の精密補正は効かないだろう。従って電離層を十分な精度で抑えられれば条件が良ければ100km基線でも即時FIXし水平1cmの精度が出る。電離層精度は2重差で5cm以下は必要。この辺はやはりGIMでは無理で多数局を使ってLIMを推定せざるを得ないだろう。ということで大体技術的な目処が見えてきたので基準衛星選定/切り替え、サイクルスリップ検出/回復等のより実用的だが面倒な部分の実装に入る。
しかし長基線RTKには巧妙で特別なアルゴリズムが必要になると予想していたが、ほとんど基本モデルと力技で何とかなりそうな雰囲気ではある。
論文、その他リンク
I.Kashani et al., Towards Instantaneous Network-Based RTK GPS
Over 100 km Distance, ION AM, 2004
100km超基線RTKでの瞬時整数不定性決定(AR)。上で書いたのと全く同じ様な結論。基準観測網からの電離層補正値及び事前電離層推定値を使えば瞬時AR可能としている。1日色々と評価したが100km基線ではやはり当該データだけでは瞬時ARは無理だろう。DD遅延精度で5cmが必要というのも同じだが電離層補正値の補間では夜間に誤差が大きいとしている。日本の場合は観測局網(GEONET)の空間密度が高いので近隣局電離層補正値の補間でいけるのではないかと思う。でもこれって既存のネットワーク型RTKと技術的にダブる部分が多い。
.....................................................................................................................................
LAMBDAの中身を見れば見るほど巧妙なアルゴリズムであることに感心する(といってもTeunissenが発明したわけでは無いようだが)。ある意味で芸術作品と言える。(改良版)LAMBDAは理論的には最適解をほぼ最適に近い効率で得るアルゴリズムである様で他の整数不定性決定ルーチンを実装する必要性は少なそう。後はその使い方。一般的な最小二乗と同じ様に誤差がgaussianでなければ最尤推定となる保証は無いからgaussianでない誤差要因をキチンと補正してあげなければ宝の持ち腐れとなる。
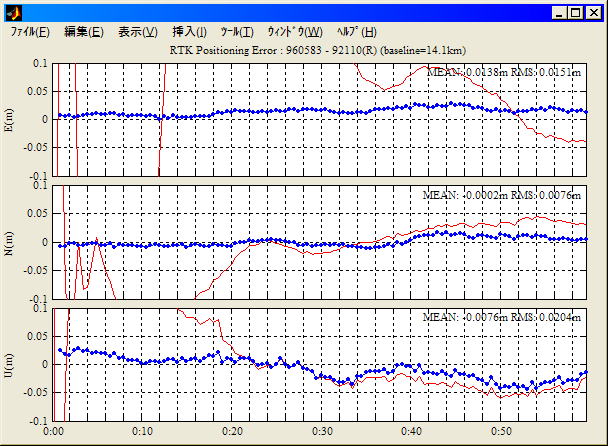
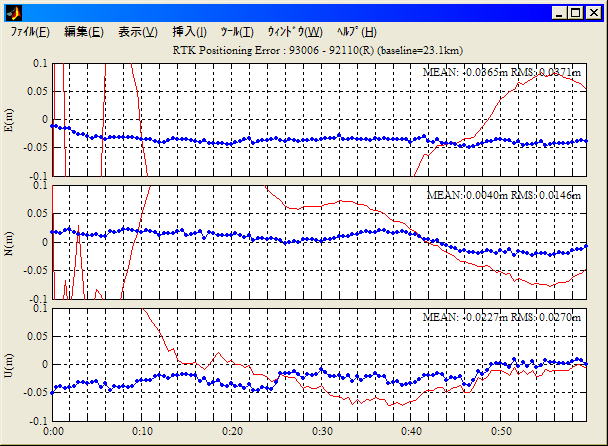
RTK評価その6。RTK試験プログラム4。変更は対流圏モデル補正、観測誤差仰角依存モデルの追加。評価結果。これからが難しい。とりあえず電離層の推定を入れてみるか。
| 測位局 | 基準局 | 基線長 | RMS誤差(cm) | 測位率 | 結果 | ||
|---|---|---|---|---|---|---|---|
| E | N | U | |||||
| 960759 三浦2 | 93040 三浦1 | 3.3 km | 0.8 | 0.7 | 1.3 | 100% | * |
| 960583 石下 | 92110 つくば1 | 14.1 km | 1.5 | 0.8 | 2.0 | 99.1% | * |
| 93006 出島 | 92110 つくば1 | 23.1 km | 3.7 | 1.5 | 2.7 | 100% | * |
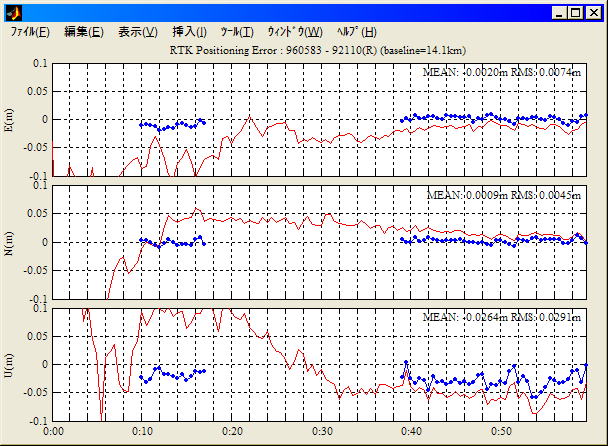
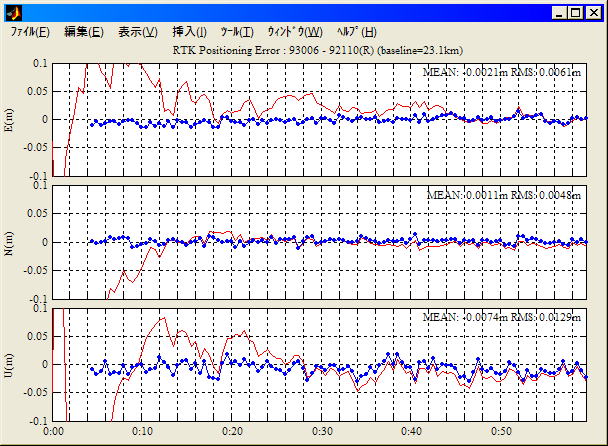
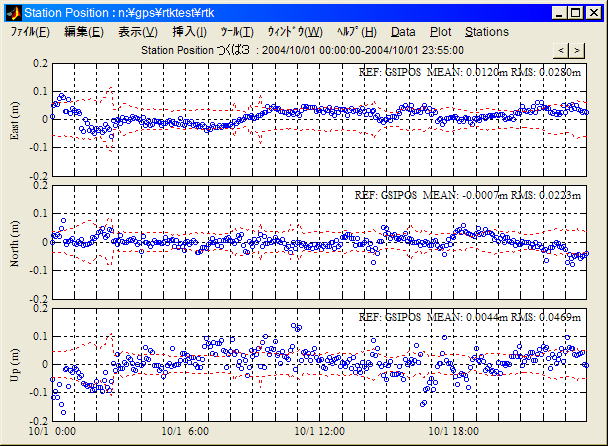
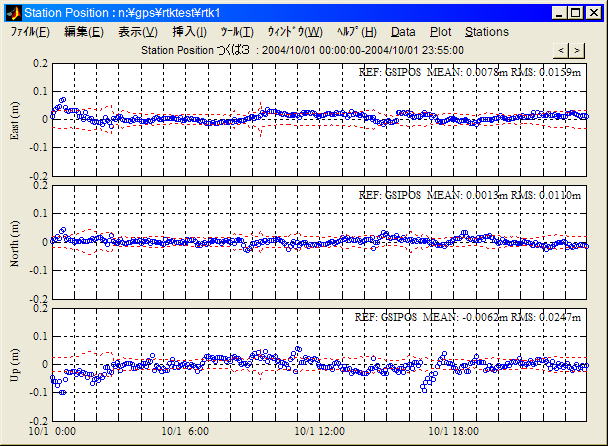
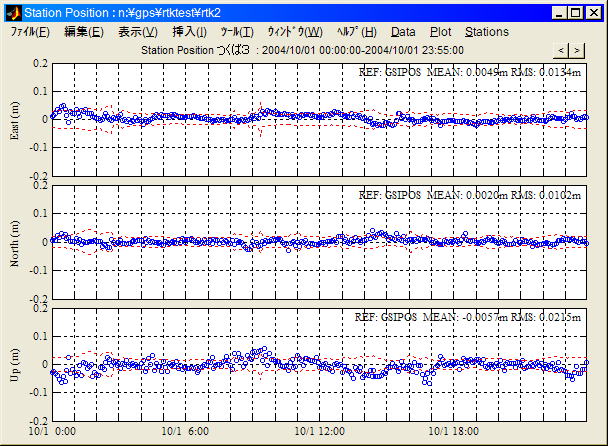
RTK評価その7。変更は電離層推定、擬似距離観測値使用の追加。評価結果。この辺からノウハウになってくるのでプログラムは非公開。1秒データを使えると電離層推定の収束が速いはずでAmbiguity
FIX時間はもう少し改善される可能性がある。
| 測位局 | 基準局 | 基線長 | RMS誤差(cm) | 測位率 | 結果 | ||
|---|---|---|---|---|---|---|---|
| E | N | U | |||||
| 960583 石下 | 92110 つくば1 | 14.1 km | 0.7 | 0.5 | 3.0 | 47.5% | * |
| 93006 出島 | 92110 つくば1 | 23.1 km | 0.6 | 0.5 | 1.3 | 92.5% | * |
| 93015 大栄 | 92110 つくば1 | 44.3 km | 0.6 | 0.7 | 1.5 | 53.3% | * |
| 93022 銚子 | 92110 つくば1 | 79.7 km | 1.1 | 0.4 | 1.1 | 49.2% | * |
(本解析には国土地理院電子基準点データを使用しました)
.....................................................................................................................................
昨日のLAMBDA(1/2) RTK試験プログラム2。LAMBDAの部分は昨日リンクの論文そのままであり(内容はともかく)実装に難しいところは何もない。なお実用的には基準衛星選定/切り替え、サイクルスリップ検出/回復やエラー処理が必要になるのでずっと複雑になる。これからsearch及び2周波対応を入れる。それから対流圏モデル補正を入れて10km程度の基線評価、その後は電離層が入ってくるのでぐっと難しくなるはず。
RTK評価その5。960759 三浦2 - 基準局93040 三浦1(基線長3.3km)。変更点はsearchの追加, 2周波対応。RTK結果: L1, L1+L2。Ambiguity FIX高速化には2周波は役立つが精度向上にはあまり役立たない様。これはL1/L2共通の誤差要因(対流圏,電離層,衛星軌道等)が精度を悪化させているからだろう。RTK試験プログラム3。LAMBDAルーチン。LAMBDAのsearchはオリジナルではなくshrinkingを入れた改良版。ただアルゴリズムは昨日論文をそのまま実装しただけ。
960583 石下 - 基準局92110 つくば1(基線長14.1km) RTK結果: L1, L1+L2。この位の基線長になると明らかに系統誤差が入ってくる。L1のみでは最初のほうでミスFIXしている。FIX判定アルゴリズムは改良する必要があるかもしれない。
.....................................................................................................................................
ちょっと必要があったのでIGS局 受信機DCB(P1-P2)
一覧 (出力プログラム)。DCB値は2004/12のIGS TECから抜き出している。同一機種でも結構バラツキが大きいし絶対値も大きい。
放送暦時計は電離層フリー擬似距離(多分C1-P2)で定義されるので単独測位ではTGDパラメータを使い衛星DCB補正を行う。ただ通常受信機DCB補正は行わないのでこれだけ大きいと結構測位誤差として効いてくるはず。機種毎の定数については受信機ファームで補正すべき様な気がするがこの辺の補正は行われていないのだろうか。
以上を書いてしまってから、よく考えたら受信機DCBは全観測で同一なので測位解には影響を及ぼさないことに気が付いた (受信機時計推定には効く)。結局受信機DCBが問題となるのは主に擬似距離を使って電離層を推定する場合ということになる。
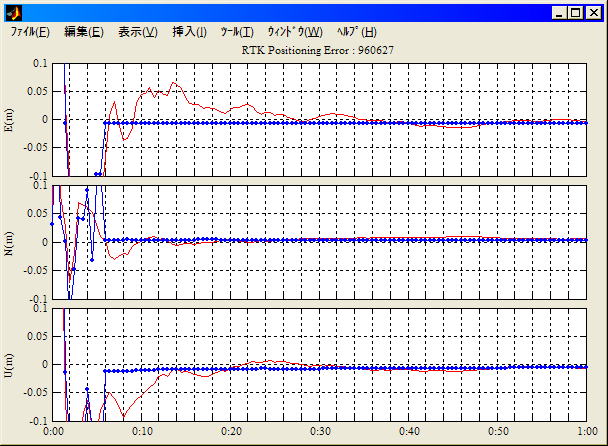
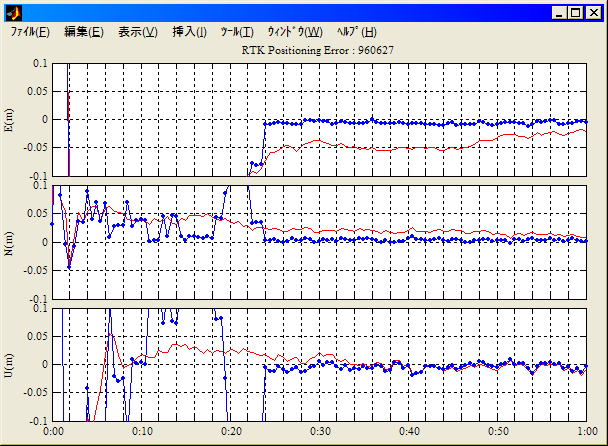
RTK評価その4。960627 つくば3 - 基準局92110 つくば1 (基線長0.3km)。カルマン+Ambiguity FIX。結果: Static, Kinematic (青: FIX解, 赤: FLOAT解)。試験プログラム。Ambiguity Fixingは最も単純な整数丸め(ROUND)だがStaticで10分以内、Kinematicでも25分位で正解にFIXされている。超短基線なので放送暦を使っても1cm以内の精度が出ている。これからLAMBDAの実装、評価。
論文、その他リンク
X.W.Chang et al., MLAMBDA: A modified LAMBDA method for integer
least-squares estimation, Proceedings of ION 61th Annual Meeting,
2005
LAMBDAの改良版アルゴリズム。オリジナルに比較し計算量をかなり減らせるとしている。オリジナルLAMBDAの分かりやすい解説がある。
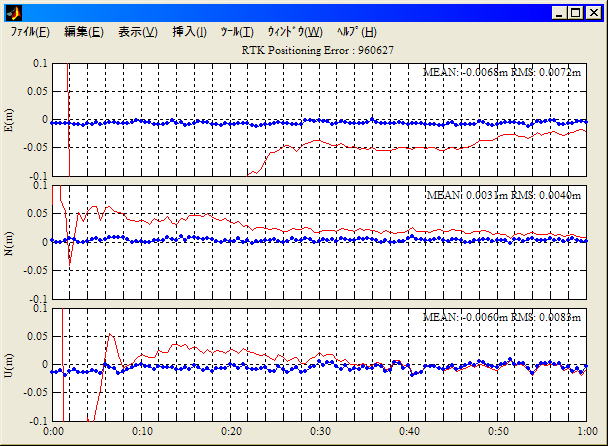
LAMBDA(1/2)を入れたRTK結果。条件は上と同じ。超短基線、8衛星と条件は良いが1epochで正解にAmbiguity FIXし精度も文句ない。(1/2)の意味はdecorrelationのみでsearchがまだ入っていないの意。ちょっと簡単に行き過ぎでどこかに落とし穴が有りそう。
.....................................................................................................................................
RTK評価その2。930022銚子-基準局92110つくば1(基線長79km)。リアルタイム利用可能なIGU予報値を衛星軌道として使ったDD結果。電離層フリーFLOAT解。収束に2Hくらいかかっているが収束後は水平2-3cm, 垂直6cmくらいの精度は出ている。一般にRTK精度は 1cm+1ppm×基線長と言われているからそれよりも良い。これを見るとAmbiguity FIXは収束高速化には寄与するがやはり精度向上にはそれほど効かないのかもしれない。電離層フリーでは観測誤差が3倍になるので短基線RTKで精度が出るのは1周波を使えるのが大きい気がする。
RTK評価その3。PPP(LC),短基線DD(LC),短基線DD(L1),短基線DD(L2)の比較。960627 つくば3, 基準局92110 つくば1 (基線長0.3km)。衛星軌道IGS
Final。foward/backward+smoothing。FLOAT解。超短基線なのでDDでは対流圏は無視できるはず。DD(LC)とDD(L1/L2)の差は線形結合を取ることによる誤差増加と解釈できる。PPP(LC)とDD(LC)の差はZD-DD差+対流圏補正残差。L1とL2マルチパス間が無相関ならL1/L2両者を使いAmbiguity
FIXすると短基線DDはもう少し精度が上がるはず。これを見る限り後処理でもPPPは短基線DDには勝てない。ただし主に対流圏補正の問題なので2局のPPP結果の差で評価すればほとんど変わらない可能性もある。ただしリアルタイムでは使える精密時計がないのでPPPはどうしようもない。
| Strategy | Observable | ZTD | Meas Noise (cm) |
RMSE (cm) | Errors | ||
|---|---|---|---|---|---|---|---|
| E | N | U | |||||
| PPP | LC | Estimated | 0.9 | 1.34 | 1.45 | 3.29 | * |
| DD | LC | Model | 0.9 | 2.80 | 2.23 | 4.69 | * |
| DD | L1 | Model | 0.3 | 1.59 | 1.10 | 2.47 | * |
| DD | L2 | Model | 0.3 | 1.34 | 1.02 | 2.15 | * |
以上をまとめるとこんな感じか。
| ・RTK | : 短基線DD>長基線DD>>PPP |
| ・後処理キネマティック | : 短基線DD≧PPP>長基線DD |
.....................................................................................................................................
窓の外では雪煙が舞っている。あっと言う間に本格的な冬景色。冬の山は何時見ても神々しくて美しい。
別件で1日外出。東京は銀杏の葉がずいぶん残っていてまだ晩秋といった風情。こちらとは随分と違う。
.....................................................................................................................................
何故急に相対測位なのか。これはひとえにRTKのため。IGS品質でリアルタイム高時間分解能の衛星時計/軌道が一般に利用できる様になるのは期待薄だし自分で作るのも壁が大きい。長時間スタティックや後処理キネマティックではPPPが相対測位を駆逐していくだろうと思っているがユーザは少ない。RTKはユーザが多いし解決されていない技術的課題も多い。
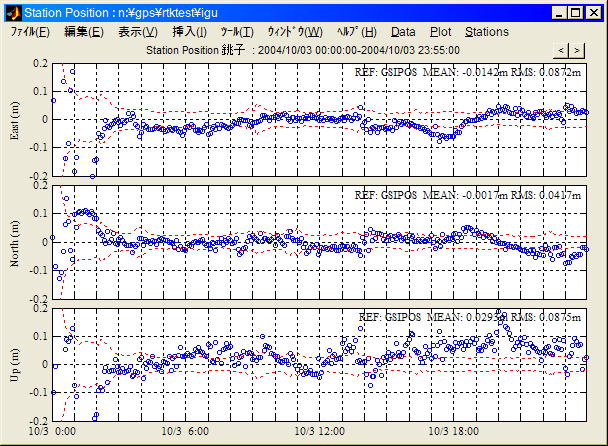
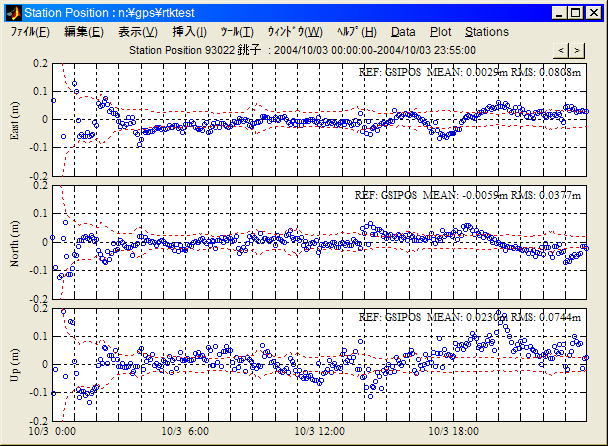
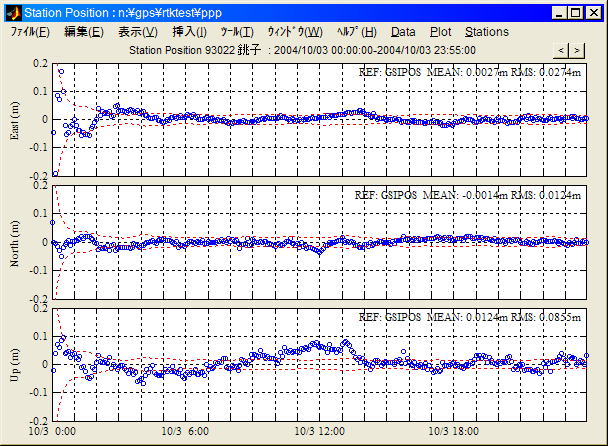
GTには実は二重差(DD)が実装されているので少し評価してみた。電子基準点930022銚子 DD, PPP。DD基準局は92110つくば1、基線長79km。Kinematic, Forwardのみ, 電離層フリーFLOAT解。DDでは(差を取ることにより)観測誤差が約2倍になるのでPPPに比較し精度が落ちる。精密補正を入れれはDDによる誤差相殺効果も差がでない。当面の目標は100km程度の長基線RTKで後処理Kinematic PPPと同程度の精度。ただ電離層フリーを使う限りAmbiguityをFIXしても(収束高速化の意味はあるが)それほど精度改善要素はないので電離層推定を入れないとダメだろう。実はこれはPPPでも同じでまだ精度改善の余地がある。
例年より早い初雪、5cmくらい。タイヤをまだ履き替えてなくてチェーンで走っている車が結構いる。
.....................................................................................................................................
今朝の八ヶ岳は真っ白。本格的な冬も近い。
論文、その他リンク
P.J.G.Teunissen, The least-squares ambiguity
decorrelation adjustment: a method for fast
GPS integer ambiguity estimation, Journal
of Geodesy, Vol.70, pp.65-82, 1995
とりあえずLAMBDAのオリジナルっぽいのを購入$30也。Teunissenも沢山書いているのでどれが本命なのかよく分からない。Ambiguityは調べだすと情報量が爆発するし気合入れないと理解も難しいのが多いのであまり深入りしたくない。最も有望そうなのを1つか2つ実装して評価すればいいと思っているのだが。
近藤, 整数最小二乗計算と連続的な高精度GPS測位, GPS/GNSSシンポジウム2005
講演で聞いたときは正直ほとんど理解できなかったのだが今読み返すと少しは分かる様になった。解説としてはまとまっていると思うが理解できた人は何%いたのだろう。探索アルゴリズムについてはLAMBDAと違う様なので改良部分ということなのだろうか。
清水, 格子基底縮小とその応用, 日本応用数理学会「数論アルゴリズムとその応用」研究部会,
2002
LAMBDAの最初のステップで使用される格子基底縮小(Lattice
Basis Reduction)アルゴリズムの紹介。別にGPSのために開発されたわけではなくもともとは暗号解読が主な応用の様。整数最小二乗はこの応用のうちCVP(Closest
Vector Problem)ということになる。
.....................................................................................................................................
覚え書き
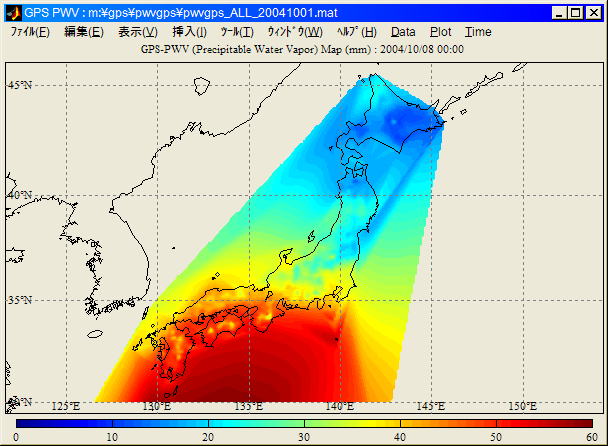
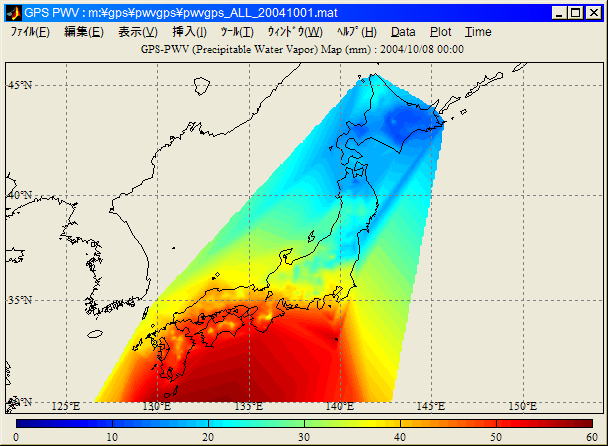
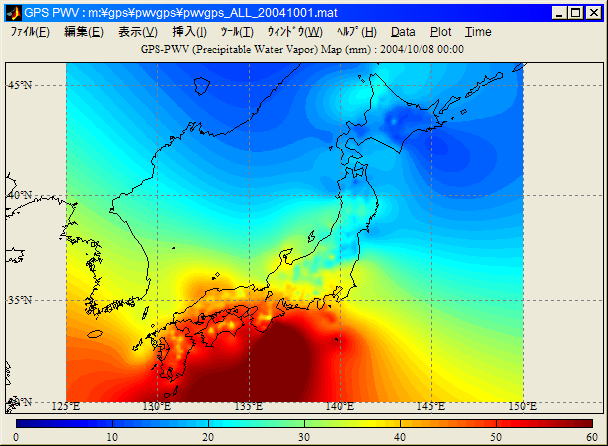
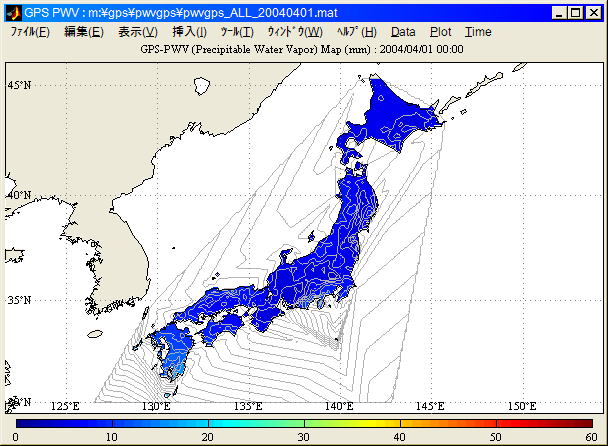
(1) matlab griddataの補間法の差異。(linear, cubic, v4)。linear,cubicはデータ点の外側を補間(補外)してくれない。v4は遅い。PWVマップはlinearを使っているので良く見るとわかる様に北海道北端と知床半島が抜けてしまっている。
(2) matlabで複雑なグラフの描画時に表示が乱れる場合がある(例)。この場合オブジェクトの上下関係が乱れフォントのアンチエリアシングが効かなくなる。これはどうもmatlabのzbufferレンダラのバグっぽい。これを避けるためにはfigureのプロパティ'renderer'を'painters'に設定しレンダラ選択を固定する。('renderermode'も自動的に'manual'に設定される)
搬送波位相測定値による精密測位の理論及び解析処理 正誤表 追加。
論文、その他リンク
The Easy Suite - Matlab code for the GPS
newcomer -- by Kai Borre
The Easy Suiteと呼ぶGPS解析用matlabライブラリ、m-file集。LAMBDAの実装も含まれている。次バージョンGTでRTK用にLAMBDAを実装予定だがmatlabじゃ速度が出そうもないので多分C(MEX)で書くことになる。LAMBDAは整数最小二乗ルーチンとして汎用性が高いので一度作ってしまえば何でも使えるはず。
.....................................................................................................................................
師走。10月くらいから時間経過が異様に速い気がする。
.....................................................................................................................................
12月予定
.....................................................................................................................................
| Home | by T.Takasu |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}