{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
擔婰丒旛峫榐 |
2004 | 2005/1 2 3 4 5 6 7 8 9 10 11 12 | 2006 |
| July | August 2005 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
September | Home |
.....................................................................................................................................
2005/08/31
柊偔偰堦擔慡偔岠棪忋偑傜偢丅崱擔偼憗偠傑偄丅柧擔怓乆偲惍棟偟傛偆丅
.....................................................................................................................................
2005/08/30
榑暥丄偦偺懠儕儞僋
C.Alber et al., GPS surveying with 1mm precision using corrections
for atmospheric slant path delay, Geophy. Res. Lett., 1997
儅儖僠僷僗懳嶔傾儞僥僫偲悈忲婥儔僕僆儊乕僞偵傛傞僗儔儞僩懳棳寳抶墑曗惓偵傛傝,
悈暯1mm埲壓, 悅捈1.2mm偺嵗昗repeatability傪払惉偟偨偲偟偰偄傞丅彮偟屆偄榑暥丅偙傟傪撉傓偲惛枾應埵偺柺偱偙偙10擭埵戝偒側媄弍恑揥偑偁偭偨傢偗偱偼側偄偙偲偑暘偐傞丅
懡悢偺榑暥傪帪宯楍偱挱傔傞偲崱帺暘偺傗偭偰偄傞帠偺埵抲晅偑暘偐傞偺偩偑丄岞暯偵尒偰墷暷偺5-10擭慜偺媄弍悈弨傪側偧偭偰偄傞偵偡偓側偄偺偩傠偆丅堄枴偑側偄傢偗偱偼側偄偑壙抣偼側偄丅偝偰偙偺愭壗張傊峴偔偐丅
.....................................................................................................................................
2005/08/29
榑暥丄偦偺懠儕儞僋
C.Rocken et al., Improved Mapping of Tropospheric Delays, J.Atomos.Oceanic Technol., 2001
懳棳寳抶墑儅僢僺儞僌娭悢偺昡壙丅悢抣梊曬僨乕僞傪巊偭偨捈愙儅僢僺儞僌娭悢偵傛傝丄NMF偵斾妑偟摿偵掅嬄妏惷悈埑抶墑偺婫愡丄堒搙埶懚僶僀傾僗偑夵慞偝傟傞偲偟偰偄傞丅偦偺懠懡偔偺GPS娭楢榑暥傪娷傫偩戝婥娤應娭楢榑暥廤
COSMIC References丅偟偐偟悽偺拞偵GPS娭學榑暥偼偳傟偩偗偁傞偺偩傠偆丅偄偔傜偱傕桸偄偰偔傞偲尵偆姶偠丅
.....................................................................................................................................
2005/08/28
嶐擔儕儞僋偺夝愅傪GT偱傗偭偰傒偨傜偳傟偩偗寁嶼帪娫偑偐偐傞偺偐尒愊傕偭偰傒偨丅10擭暘600嬊丄婳摴/帪寁梡42嬊丄300昩娫妘丄PPP
2pass偲偟偰丅
塹惎婳摴,帪寁,ERP : 1.8H亊365亊10=6570H丄嬊埵抲,懳棳寳,嬊帪寁,Geocenter
: 8昩亊600嬊亊365亊10=4870H丄寁 : 11440H=477擔
PC5戜偱暘嶶寁嶼偟偰栺3儢寧丅HD偼奣偹2-3TB丅JPL偼偝偡偑偵僗僷僐儞巊偭偰偄傞偺偩傠偆偐丅
.....................................................................................................................................
2005/08/27
僒僀僋儖僗儕僢僾傕傗偭偲栚昗偵嬤偄偲偙傠傑偱婑偭偰偒偨丅偱傕傕偆彮偟偱8寧傕廔傢傝丅偦傠偦傠愭偺帠傪峫偊偹偽偄偗側偄丅
榑暥丄偦偺懠儕儞僋
M.B.Heflin, GPS Time Series Data Set, Jet Propulsion Laboratory, NASA, 2002
600埲忋偺GPS娤應嬊偺10擭埲忋偵傢偨偭偰偺挿婜嵗昗夝愅寢壥丅Geocenter摍傕摨帪偵夝愅偟偰偄傞丅GIPSY偵傛傞static PPP夝偺偼偢丅daily repeatability偱N:3.7mm,
E:5.3mm, U:10.1mm偲偟偰偄傞丅GPS婳摴/帪寁偼帺暘偱嶌偭偰偄傞傛偆偩 (嶲峫 IGSMAIL-3635)丅偙傟偩偗偺夝愅偵偳傟偩偗寁嶼帪娫偑偐偐傞偺偩傠偆丅
.....................................................................................................................................
PPP妎偊彂偒 : 僒僀僋儖僗儕僢僾曇廤(3) 捛壛丅2004/10/4 6:55偺 PRN31-SANT偺僒僀僋儖僗儕僢僾偼偳偆傕寁嶼偑崌傢側偄丅偳偙偐偱寁嶼儈僗傪偟偰偄傞偺偐丅
榑暥丄偦偺懠儕儞僋
L.H.Estey et al., TEQC: The Multi-Purpose Toolkit for GPS/GLONASS
Data, GPS Solution, Vol.3, No.1, p.42-49, 1999
TEQC偺MP1, MP2慄宍寢崌偺儌僨儖傪妋擣偟偨偐偭偨偺偱$30偱峸擖丅TEQC傕傾儖僑儕僘儉扨弮偱惛枾夝愅梡偺慜張棟僾儘僌儔儉偲偟偰偼岺晇偑柍偝偡偓傞姶偠丅偟傚偣傫昳幙僠僃僢僋梡僾儘僌儔儉偲偄偆偙偲偐丅
嵟嬤偺傂偭偐偐傝丄枹夝寛帠崁 : JOZE嬊PPP寢壥偺僶僀傾僗丅2004/10/4
PRN31-SANT僒僀僋儖僗儕僢僾夝庍丅
.....................................................................................................................................
PPP妎偊彂偒 : 僒僀僋儖僗儕僢僾曇廤(2) 捛壛丅偲傝偁偊偢傗偭偰偄傞偙偲偺儊儌丅
.....................................................................................................................................
僒僀僋儖僗儕僢僾専弌夵廋丅専弌儈僗傪屌掕嬊偺Kinematic
PPP偺旘傃偱僠僃僢僋偟夵慞傪孞傝曉偡丅寢峔揇廘偄嶌嬈丅
.....................................................................................................................................
2005/08/23
榑暥丄偦偺懠儕儞僋
J.F.Zumberge et al., Precise point positioning for the efficient
and robust analysis of GPS data from large
networks, J.Geophys.Res. Vol.102 p.5005-5018, 1997
怓乆側榑暥偐傜堷梡偝傟偰偄傞偺偱PPP偺僆儕僕僫儖榑暥偺條丅堷梡偵昁梫側偺偱峸擖$9丅PPP偺棟榑揑夝愅丄惛搙昡壙丅偙傟傪撉傓偲PPP偺傕偲傕偲偺摦婡晅偗偼懡悢嬊僨乕僞偺寁嶼帪娫抁弅偵桳偭偨傛偆偩丅"40M-flop
computer" 偲偐帪戙傪姶偠傞丅
S.Y.Zhu et al., Satellite antenna phase center offsets and
scale errors in GPS solutions, J.Geodesy Vol.76 p.668-672, 2003
ITRF2000偵偍偗傞GPS夝偺scale offset偑庡偵塹惎傾儞僥僫埵憡拞怱偵傛傞傕偺偩偲偟偰丄GPS婳摴丄帪寁丄ZPD丄嬊嵗昗摍傊偺塭嬁傪夝愅偟偰偄傞丅摿偵帪寁悇掕偵僶僀傾僗偲偟偰岠偔偲偟偰偄傞丅Full-Text
$30丅帋偟偵攦偭偰傒偨偑偪傚偭偲崅偄丅
R.Schmid et al., Estimation of elevation-dependent satellite
antenna phase center variations of GPS satellites, J.Geodesy Vol.77 p.440-446, 2003
CHAMP偺傾儞僥僫PCV僨乕僞傪扵偟偰偰尒偮偗偨丅偲傝偁偊偢挘偭偰偍偔丅
7寧枛偵怽惪偟偨GFZ CHAMP-ISDC偺僷僗儚乕僪偑傗偭偲憲傜傟偰偒偨偑僒乕僶忈奞偐傾僋僙僗偱偒側偐偭偨丅杮擔暅媽偟偨條丅帪娫偑偁傑傝側偄偑CHAMP傕Kinematic
PPP偵傛傞POD傪峴偭偰傒傞丅ISDC偺僔僗僥儉柺敀偄丅Web偱僨乕僞怽惪偡傞偲僒乕僶偺帺暘偺傾僇僂儞僩偵奿擺偝傟傞偺偱偦傟傪FTP偱僟僂儞儘乕僪偡傞丅僨乕僞検惂尷偼1擔摉傝500MB丅RINEX娤應僨乕僞媦傃Rapid
Orbit傪棊偲偡丅婳摴僼僅乕儅僢僩偼CHORB丅
.....................................................................................................................................
僼傽僀儖僒乕僶晄挷丅儕僙僢僩偟偰傕儈儔乕儃儕儏乕儉偺嵞摨婜拞偵屌傑傞丅偲傝偁偊偢僼僅乕儅僢僩偟偰嵞搙帋偡偑僟儊偩偭偨傜岎姺丅奧奜偝側偄偱傕僨傿僗僋岎姺偱偒傞僒乕僶働乕僗傎偟偄丅LAN僇乕僪偑GigaEther擣幆偟側偔側傞偟傑偢偄孹岦丅戝懱寁嶼婡僩儔僽儖偼弌偩偡偲楢嵔揑偵婲偙傞偺偱拲堄丅
PPP妎偊彂偒丗僒僀僋儖僗儕僢僾曇廤 捛壛丅GT偺僒僀僋儖僗儕僢僾曇廤偼傑偩immature丅崱屻専摙撪梕傪傑偩傑偩捛壛梊掕丅惛枾應埵偱偼旔偗偰捠傟側偄榖戣丅僲僂僴僂傪敇偗弌偟偰偄傞婥傕偡傞偑傑偁偄偄偐丅
.....................................................................................................................................
榑暥丄偦偺懠儕儞僋
堦怓, 2廃攇挿婎慄僉僱儅僥傿僢僋夝偵偍偗傞儚僀僪儗乕儞偺棙梡(1),
(2) , 應抧妛夛帍 戞51姫戞2崋, 2005
MW偵傛傞WL Ambiguity丄IONEX偲LG偵傛傞揹棧憌抶墑偐傜婎慄挿傪寛傔嵞搙L1
Ambiguity傪Fix偟偰丄挿婎慄僉僱儅僥傿僢僋夝傪媮傔傞丅揹巕婎弨揰婎慄20乣800km偱昡壙偟婎慄挿惛搙1乣11cm丅挊幰偼柉娫尋媶幰偺條丅儐僯乕僋側尋媶偩偲巚偆偑丄傕偆偦傠偦傠GPS尋媶偺斾廳偑Ambiguity夝寛偐傜懠偵堏偭偰傕偄偄偺偱偼側偄偐丅
PPP妎偊彂偒 : Clock Steering偵敽偆媅帡嫍棧娤應抣偺旘傃 峏怴丅GT偺僋儘僢僋旘傃廋暅傾儖僑儕僘儉偵偮偒捛壛丅Clock
Steering偼庴怣婡僋儘僢僋偲GPS帪崗偺嵎偑0.5ms埲忋偵側偭偨傜1ms偢傜偡摦嶌傪偡傞庴怣婡偑懡偄傛偆側偺偱婰弎廋惓丅GT偱偼傑偩Steered
Clock庴怣婡偺帪寁悇掕偵堦晹栤戣偑桳傝傑偩尒捈偡偐傕偟傟側偄丅傑偨僛儘嵎偱偼栤戣側偄偑擇廳嵎偱Steered
Clock庴怣婡偲偦偆偱側偄庴怣婡偲娫偱婎慄夝愅偡傞応崌丄偙偺廋暅偱偼栤戣偑弌傞偐傕偟傟側偄丅偟偐偟帪寁偺張棟偼偲偭偰傕擄偟偄丅
.....................................................................................................................................
揹巕婎弨揰偺Time Tag Offset偼惓妋偵枅帪0暘偵儕僙僢僩偝傟摨帪偵僐乕僪偑旘傫偱偄傞丅IGS嬊偼1擔枅偵儕僙僢僩偝傟偰偄傞応崌偑懡偄丅偳偆傕偙偺応崌偼RINEX弌椡扨埵偱0儕僙僢僩偝傟偰偄傞傛偆偩丅偡側傢偪尦偺RINEX僨乕僞偵偼僐乕僪旘傃偼側偔暋悢僨乕僞偺暪崌帪偵旘傃偑尰傟傞傛偆偩丅
PPP妎偊彂偒 : Clock Steering偵敽偆媅帡嫍棧娤應抣偺旘傃 捛壛丅偪傚偭偲晄柧椖側揰偑偁傝尒捈偡偐傕偟傟側偄丅
榑暥丄偦偺懠儕儞僋
戝捸, 塹惎儗乕僓乕應嫍僨乕僞偺崅惛搙夝愅 - cm偐傜mm傊
- , 應抧妛夛帍 戞51姫戞1崋, 2005
崱擭搙偺應抧妛夛帍偑憲傜傟偰偒偨偺偱偦偺拞偐傜丅應抧妛夛捸堜徿婰擮榑暥丅concerto偺峔惉,
儌僨儖, 夝愅帠椺徯夘丅Java偼惈擻揑偵偳偆側偺偐丅摿偵峴楍墘嶼偵ATLAS傗MKL巊偊側偄偺偼偒偮偄偺偱偼側偄偐丅
.....................................................................................................................................
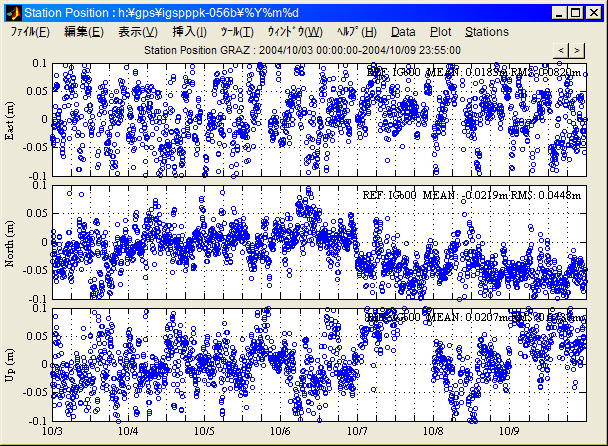
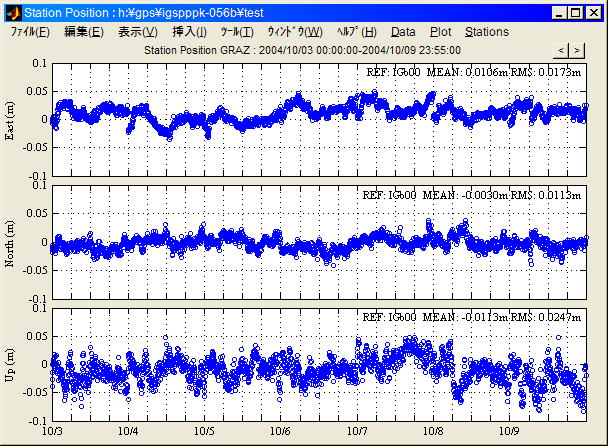
IGS婎弨嵗昗嬊Kinematic PPP惛搙昡壙丅椙偄嬊偼悈暯1cm,悅捈3cm埵偵擖偭偰偄傞偺偱惛枾楋偼栤戣側偄丅埆偄嬊偺偆偪GRAZ, NOUM, ZIMM偼Clock Jump偑尨場丅庴怣婡偼AZTECH UZ-12, TRIMBLE5700, TRIMBLE4700丅揹巕婎弨揰偲偼堘偭偰time-tag offset偺旘傃偼尒傜傟側偄偺偱Clock Jump曗廋傾儖僑儕僘儉偺夵廋偑昁梫丅偦偺懠埆偄嬊偼娤應忦審偑埆偔僒僀僋儖僗儕僢僾曗廋傪擖傟側偄偲惛搙偑忋偑傜側偄偩傠偆丅偟偐偟憡摉偵忦審偑埆偄嬊偱傕Static偱偼偦傟側傝偺惛搙偑弌傞偺偼晄巚媍丅Kinematic偼埆偄偲偙傠偑擛幚偵尰傟傞偺偱偙傟傪夵慞偡傟偽慡晹椙偔側傞偲傆傫偱偄傞偺偩偑幚偼偁傑傝岠壥偑柍偄偺偐傕偟傟側偄丅
Clock Jump曗廋傾儖僑儕僘儉偺夵廋丅夵廋慜仺夵廋屻丅Steered Clock Receiver偺Clock Jump曗廋偵娭偡傞榑暥側偳尒偨偙偲柍偄偺偱僆儕僕僫儖丅偨偄偟偨庤弴偱偼側偄偑偦偺偆偪夝愢傪傑偲傔傞偮傕傝丅
Steered Clock Receiver偺拞偱傕TRIMBLE4000SSI偺帪寁I偼柺敀偄摦偒傪偡傞丅Clock
Jump偼僐乕僪旘傃偱偼側偔time-tag offset偺旘傃偲側偭偰尰傟傞丅偦偟偰擔巒傔偵time-tag
offset偑0偵栠傝偦偙偱僐乕僪偑旘傇丅IGS婎弨嵗昗嬊偱偼GLSV,
GOUG, GRAS, HOFN, JOZE, MATE, NKLG, SYOG丅傕偟偐偡傞偲偙偺曈偼RINEX曄姺儖乕僠儞偺偔偣側偺偐傕偟傟側偄丅庴怣婡枅偵嫇摦偑堘偆偺偱懳墳偑戝曄丅Kinmatic PPP昡壙峏怴丅
.....................................................................................................................................
塅拡壢妛媄弍楢崌島墘夛尨峞奐巒丅偦偺懠僒僀僋儖僗儕僢僾曇廤娭楢夵廋摍丅
廐偺應抧妛夛島墘偺偨傔擔杮應抧妛夛擖夛怽崬彂憲晅丅擭夛旓\7000栫丅偱傕EPS偺墈棗偼暿椏嬥傒偨偄丅偙傟偱強懏妛夛偼ION偲擔杮應抧妛夛丅
.....................................................................................................................................
榑暥丄偦偺懠儕儞僋
N.Ashby, Relativity in the Global Positioning System, Living Reviews in Relativity, 2003
N.Ashby, The Sagnac Effect in the Global Positioning
System, Relativity in Rotating Frames, 2003
塹惎-庴怣婡娫揱攄嫍棧傪抧媴屌掕嵗昗偱寁嶼偡傞嵺偺曗惓偼杮摉偵Sagnac岠壥偲尵偆偺偩傠偆偐?
崌傢偣偰60暸埲忋偁傞偺偱偲偰傕慡晹偼撉傒偒傟側偄偺偱壓偺榑暥偩偗幬傔撉傒偟偨丅GPS塹惎嵗昗偑抧媴屌掕嵗昗偱掕媊偝傟偰偄傞帠偵傛傞岠壥偼"Sagnac-like
effects"偱偁偭偰"Sagnac effect"偲偼堘偆條偩丅曗惓偦偺傕偺偺棟夝偼娙扨偱丄屇傃曽偼偳偆偱傕偄偄偺偩偑偳偆傕偡偭偒傝偟側偄側偁丅
擔杮應抧妛夛戞104夞島墘夛偺怽偟崬傒偑巒傑偭偨丅怽崬9/2, 梫巪9/9乊愗(梄憲)丅傑偢偼應抧妛夛偵擖夛偟側偗傟偽側傜側偄丅偲偙傠偱揹巕婎弨揰PPP偼巚偭偨條側惛搙偑弌側偄偺偱搑拞傑偱偱拞抐丅崱夞LEO塹惎梡偵僒僀僋儖僗儕僢僾曇廤傪偐側傝捈偟偨偺偱摦嶌嵞妋擣丄僷儔儊乕僞挷惍傪傗傝捈偟偰偐傜嵞昡壙梊掕丅懡暘9寧堦攖偐偐傞丅
.....................................................................................................................................
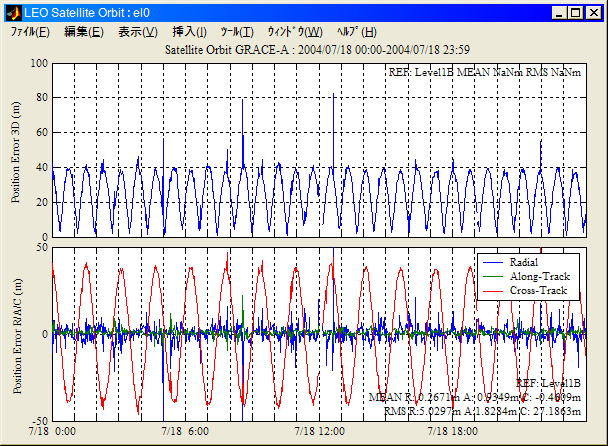
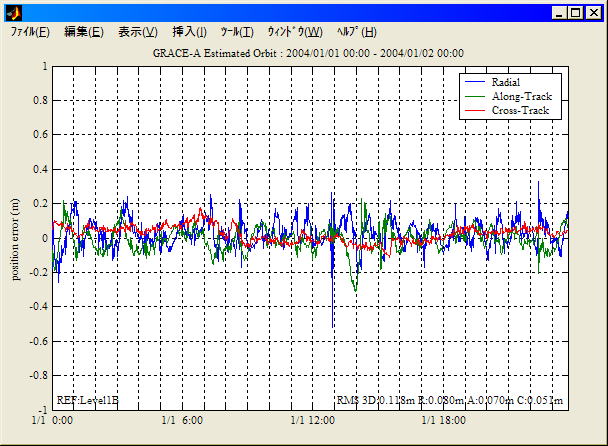
GPS偵傛傞掅婳摴(LEO)塹惎偺惛枾婳摴寛掕 峏怴丅娤應僨乕僞曇廤僶僌廋惓丅嬐偐偵惛搙夵慞丅
媅帡嫍棧偵傛傞扨撈應埵夝偲Level1B婳摴偺嵎丅Cross-Track曽岦偵LEO廃夞廃婜偱peak40m偺嵎丅sagnac岠壥傪柍帇偟偰偄傞偺偑尨場偐?
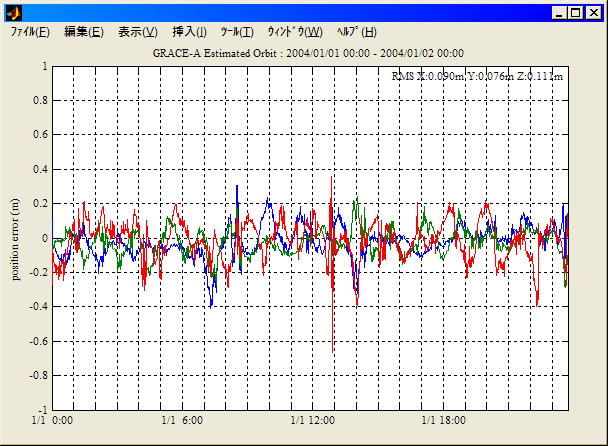
岝嵎曽掱幃寁嶼帪偵抧媴夞揮岠壥傪擖傟偨寢壥丅扨撈應埵傕寢峔擄偟偄丅悽偺拞偺僇乕僫價偼杮摉偵偪傖傫偲寁嶼偟偰偄傞偺偩傠偆偐丅
.....................................................................................................................................
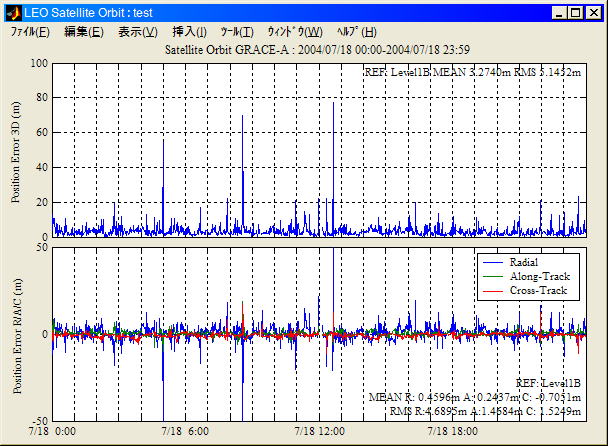
GPS偵傛傞掅婳摴(LEO)塹惎偺惛枾婳摴寛掕 峏怴丅僷儔儊乕僞挷惍媦傃1廡娫暘昡壙丅
IGS Final偺5暘娫妘帪寁偱傕廫暘惛搙偑弌傞偙偲偑暘偐偭偨丅惛枾楋偲偟偰JPL婳摴/帪寁(30昩娫妘)傕昡壙偟偰偄傞偑IGS Final偵斾妑偟彮偟惛搙偑棊偪傞丅側偍嶐擔偺僗僷僀僋忬岆嵎偼傗偼傝僒僀僋儖僗儕僢僾専弌楻傟偑尨場丅僒僀僋儖僗儕僢僾曇廤僷儔儊乕僞偺僠儏乕僯儞僌偱戝晹暘徚偊偨丅偝偰Kinematic偱傕栚昗惛搙偵嬤偄偲偙傠傑偱棃偨偺偱Reduced-Dynamic偼屻夞偟丅
扨撈應埵寁嶼儖乕僠儞偑偳傫偳傫暋嶨壔偟偰偄傞丅Light-Time媦傃旕慄宍儌僨儖曗惓偺Iteration偼摉慠偲偟偰丄堎忢僨乕僞偵傛傞敪嶶働乕僗偺Outlier摨掕媦傃彍奜/嵞悇掕丄曻憲楋旘傃懳嶔偑擖偭偰偄傞丅偦傟偱傕偨傑偵廂懇偟側偄応崌偑巆偭偰偄傞丅悽偺拞偺僇乕僫價偱偼偙偺曈僉僠儞偲張棟偟偰偄傞偺偩傠偆偐丅
妎偊彂偒
RIOG娤應僨乕僞偵偼寚應抣偲偟偰0偑擖偭偰偄傞丅偙傟偼RINEX婯掕忋惓偟偄偑尰峴GT偺readrinexobs偼偙傟傪惓忢僨乕僞偲擣幆偡傞偨傔暋悢寚應偑桳偭偨応崌扨撈應埵偺iteration偑廂懇偣偢應埵抣偑惓忢偵媮傑傜側偄丅readrinexobs偱0傪寚應偲擣幆偡傞傛偆夵廋丅
戝帠側偙偲偵婥晅偄偰偟傑偭偨丅Kinematic偺応崌應埵夝偼庴怣婡帪寁偵摨婜偟偰摼傜傟傞丅廬偭偰LEO塹惎埵抲傕GPS帪崗偐傜庴怣婡帪寁岆嵎暘偢傟偨帪崗偺抣偑媮傑傞丅Level1B婳摴偼GPST偱掕媊偝傟偰偄傞偼偢側偺偱丄Level1B婳摴斾妑偱偼Along-Track曽岦偵庴怣婡帪寁岆嵎暘偺僆僼僙僢僩(塹惎懍搙8km/s帪寁岆嵎0.01兪昩偲偟偰8cm)偑尒傜傟傞偼偢偩偑幚嵺偵偼尒傜傟側偄丅偙傟偼Level1B婳摴偑GPST偱偼側偔庴怣婡帪寁偱掕媊偝傟偰偄傞偲偄偆偙偲側偺偐...丅
.....................................................................................................................................
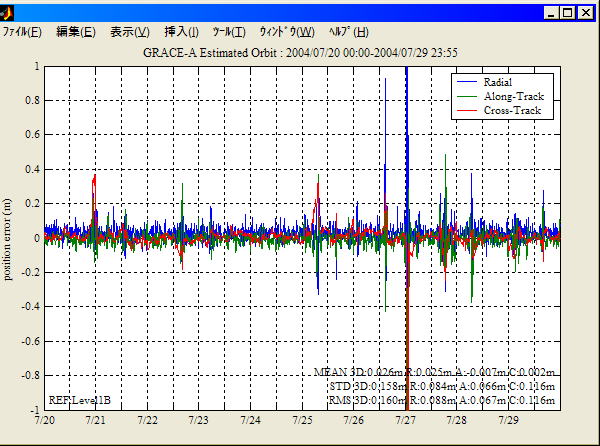
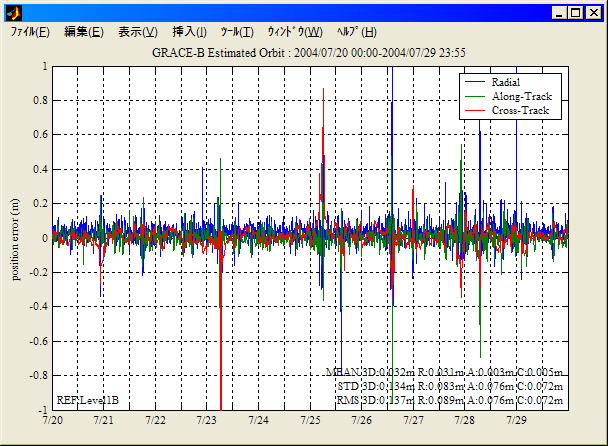
GRACE 2004/07/20-29 10擔暘婳摴寛掕寢壥(GRACE-A, GRACE-B)丅僗僷僀僋忬岆嵎傪彍奜偡傞偲3DRMS7-8cm丅斾妑婎弨偺JPL婳摴傕SLR斾妑RMS5-6cm側偺偱傎傏尷奅丅屻偼僗僷僀僋忬岆嵎傪偳偆棊偲偡偐偑Kinematic偱偺尞丅
.....................................................................................................................................
GPS偵傛傞掅婳摴(LEO)塹惎偺惛枾婳摴寛掕 捛壛丅巄掕斉丅惓幃偵偼傕偆彮偟挿婜昡壙偺梊掕丅
榑暥丄偦偺懠儕儞僋
C.Dunn et al., Instrument of GRACE : GPS Augments Gravity
Measurements, GPS World, 2003
GRACE婳摴寛掕庤朄媦傃惛搙昡壙寢壥偺徯夘偑偁傞丅GPS婳摴/帪寁偼JPL
FLINN丅Reduced-Dynamic偱壛懍搙寁偼傑偩巊偭偰偄側偄丅僆乕僶儔僢僾偱奺幉RMS1乣2cm丅SLR斾妑RMS5乣6cm丅
U.Hugentobler et al., Bernese GPS Software Version 5.0 DRAFT, Astronomical Institute University of Bern,
2005
Bernese庢愢偩偑GPS夝愅偵娭偡傞椙偄嫵壢彂偲傕側偭偰偄傞丅嵟怴斉偵偼Clock悇掕偺復(14復)偑捛壛偝傟偰偄傞丅
Kinematic偺応崌僒僀僋儖僗儕僢僾専弌偑廳梫丅Static傗GPS婳摴寛掕偱偼専弌楻傟傪嫲傟偰僗儗僢僔儑儖僪傪埨慡僒僀僪偵愝掕偟偰傕惛搙棊偪偼偦傟傎偳側偐偭偨偑Kinematic偱偼偡偖埆壔偡傞丅尰峴GT偺僒僀僋儖僗儕僢僾専弌偼娒偄偺偱愝掕傪壗搙傕傗傝捈偡昁梫偑偁傞丅傕偆彮偟帺摦偱嵟揔壔偱偒傞條偵偟側偄偲幚梡揑偱偼側偄丅偙偺曈偼椙偄暥專傕柍偔幚僨乕僞偵嫮偔埶懚偟怓乆偲帋峴嶖岆偺偄傞強丅傑偩傑偩愭偼挿偄丅
.....................................................................................................................................
寢峔戝偒側夵廋傪寛堄丅慜張棟偱扨撈應埵偵傛傝嬊埵抲懍搙傪寁嶼偟慜張棟嵪娤應僨乕僞偵擖傟傞丅悇掕帪偵嬊懍搙/巔惃偼偦傟傪巊偭偰奣嶼寁嶼偡傞丅偙傟偱峔憿偑僗僢僉儕偡傞丅暋嶨側廋惓偼摢偺嶀偊偨帪偵傗傞偺偑尨懃偩偑崱擔偼僀儅僀僠丅偝偰偆傑偔峴偔偐丅
巔惃忣曬傪擖傟偨Kinematic 300昩娫妘丅3DRMS
4.7cm丅惛枾楋偼IGS Final丅偨偩偟嵟椙働乕僗丅弮Kinematic偼僒僀僋儖僗儕僢僾偵晀姶偱偡偖旘傇偺偱幚梡揑偱側偄偐傕偟傟側偄丅偙傟偐傜塣摦儌僨儖傪擖傟傞丅
.....................................................................................................................................
2005/08/11
戞49夞塅拡壢妛媄弍楢崌島墘夛僾儘僌儔儉偑up偝傟偰偄傞丅
榑暥丄偦偺懠儕儞僋
A.Niell, The IMF Mapping Functions Rev 2, 2003
Niell偵傛傞夵椙斉Mapping娭悢丅悈暯岡攝崁傕擖偭偰偄傞丅梋桾偑弌棃偨傜昡壙偟偰傒偨偄丅偦偺懠Niell偺榑暥偺懡偔偼偙偙偐傜摼傜傟傞丅尰嵼GPS夝愅偱傛偔巊傢傟偰偄傞NMF偺reference偼1996
J.Geophs.Res榑暥丅
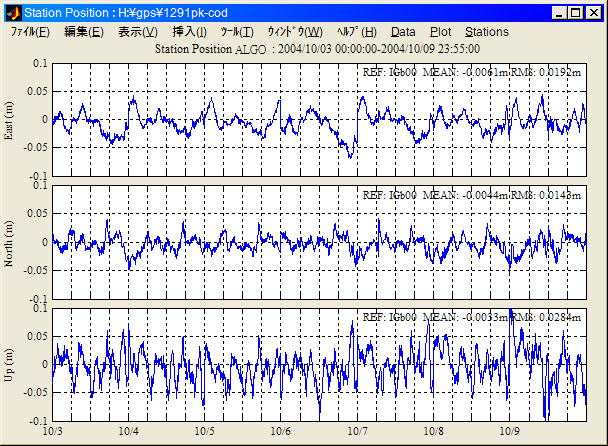
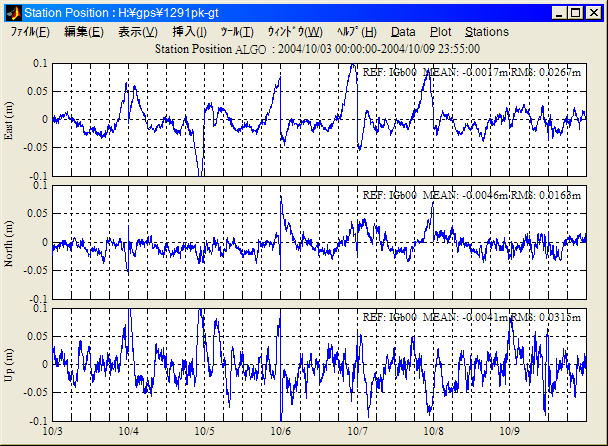
抧摴偵惛枾楋偺昡壙丅2004/10/3-10/9 ALGO Kinematic PPP寢壥(300昩娫妘)丅
| 惛枾楋 | IGS Final | JPL | CODE | GT0.5.5 |
| 埵抲岆嵎(3DRMS) | 2.7cm | 3.4cm | 3.7cm | 4.4cm |
IGS Final偑嵟傕椙偔丄師偄偱JPL丄CODE偺弴丅偙傟傪尒傞偲JPL偺戙傢傝偵GT夝傪巊偭偰惛搙夵慞偝傟傞偐偼? 廬偭偰摉柺JPL30昩楋傪巊偆偙偲偵偡傞丅偟偐偟IGS Final偼偝偡偑偺崅昳幙丅GT偼傑偩偢偄傇傫夵慞偺梋抧偑偁傞丅
LEO塹惎偺巔惃傪偪傖傫偲娤應儌僨儖偵擖傟傞夵廋丅寢峔戝曄丅Kinematic偩偲捈愙偼婳摴柺偑摼傜傟側偄偺偱Yaw夞揮偑寁嶼偱偒側偄丅慜屻悇掕抣偐傜奣嶼偱婳摴柺寁嶼丅嵟弶偺揰偼偁偒傜傔傞丅
.....................................................................................................................................
2005/08/10
壞媥傒丅垽丒抧媴攷丅巚偭偨傛傝弸偔側偐偭偨丅巕嫙払偼枮懌偟偰偄偨條側偺偱傛偟偲偡傞丅
.....................................................................................................................................
傾儞僥僫埵憡拞怱曄峏/僷儔儊乕僞挷惍寢壥丅3DRMS 12cm丅傑偩慡偔塣摦儌僨儖傪擖傟側偄Kinematic丅偝偰5cm栚昗偵偙傟偐傜怓乆偲夵廋丅
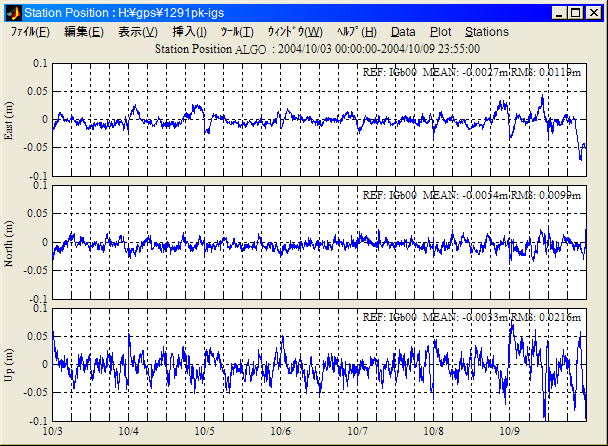
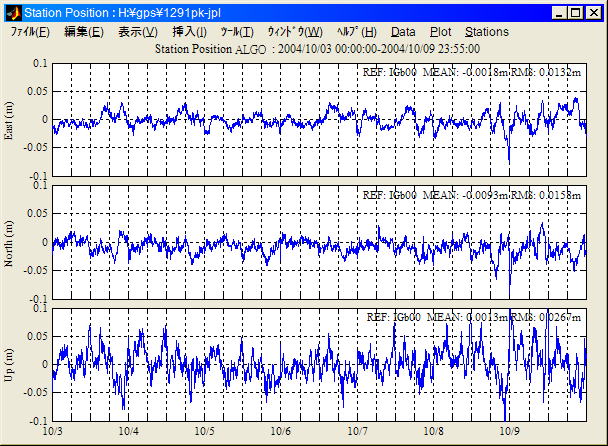
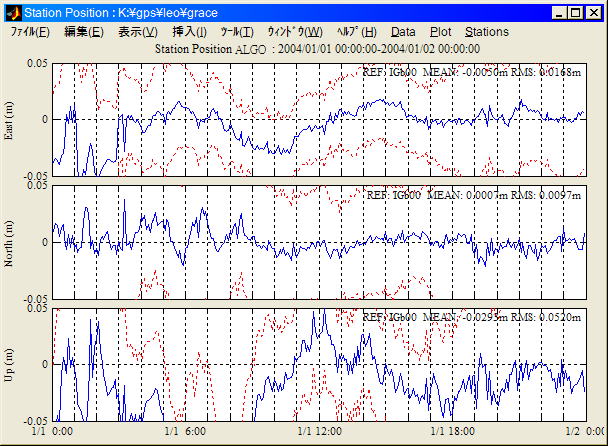
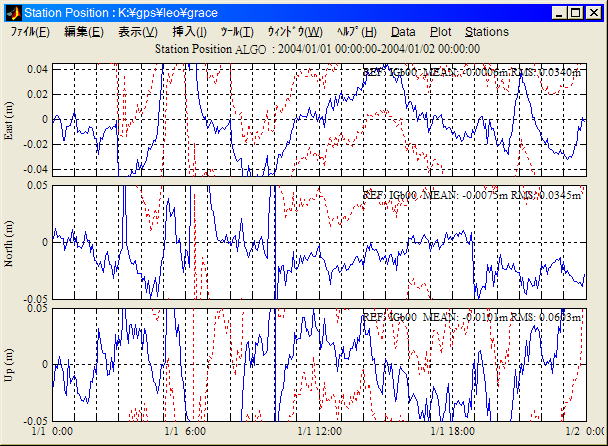
Kinematic PPP偼惛枾楋昳幙偵晀姶丅LEO婳摴寛掕梡偵偼偲傝偁偊偢30昩娫妘帪寁偑偁傞JPL夝傪巊偭偰偄偨偺偩偑IGS Final偵斾妑偟昳幙偑棊偪傞傛偆偩丅抧忋屌掕嬊(ALGO) Kinematic PPP寢壥(300昩娫妘)丅
ALGO Kinematic PPP寢壥(IGS Final)丂丂ALGO Kinematic PPP寢壥(JPL夝)
JPL夝偼塹惎傪彍奜偟偡偓傞偒傜偄偑偁傝偦傟偑塭嬁偟偰偄傞偺偐傕偟傟側偄丅CODE偼2004/01偵偼傑偩30昩帪寁傪嶌偭偰偄側偐偭偨偺偱巊偊側偄丅巇曽側偄偺偱惛枾楋傕帺慜偱嶌傞偙偲偵偡傞丅GPS婳摴寛掕偱偒傞嫮傒丅
.....................................................................................................................................
GT偱偼婥徾僨乕僞擖椡偑側偄応崌丄昗弨戝婥儌僨儖傪巊偭偰婥埑/婥壏傪寁嶼偟偰偄傞丅惓妋偵偼ICAO昗弨戝婥傑偨偼US昗弨戝婥1976偺壓憌晹暘傪巊偭偰偄傞丅嬶懱揑側幃偼
P=1013.25*(1-2.2557E-5*H)^5.2568 (hPa)
T=15.0-6.5E-3*H (C)
偙傟偼崅搙11km傑偱偟偐巊偊側偄丅傑偨H(m)偼杮摉偼僕僆億僥儞僔儍儖崅搙偱掕媊偝傟偰偄傞偑偙傟偼懭墌懱崅偱戙懼偟偰偄傞丅LEO塹惎崅搙偱偼懳棳寳抶墑偼柍帇偱偒傞偑丄峲嬻婡偺Kinematic應埵梡偵傕偆彮偟崅崅搙傑偱偪傖傫偲寁嶼偟偨曽偑椙偄偐傕偟傟側偄丅
奣嶼弶婜抣偑梌偊傜傟側偄応崌偺扨撈應埵丅抧媴拞怱傪弶婜抣偵偟偰傕iteration4-5夞偱廂懇偡傞帠偑傢偐偭偨丅偨偩偟抧媴拞怱偱傕懳棳寳曗惓儌僨儖偑堎忢抣傪弌椡偟側偄偙偲偑昁梫丅
弶偺LEO塹惎婳摴寛掕寢壥丅JPL GPS Orbit/Clock+GT Kinematic PPP丅LEVEL1B婳摴(JPL GIPSY)斾妑XYZ嵗昗岆嵎丅傾儞僥僫埵抲偼GRACE Product Specification Document偐傜X=Y=0,Z=44.4cm偲偟偨丅傾儞僥僫埵憡拞怱偑Level1B偵娷傑傟偰偄側偐偭偨偺偱AOAD/M_T宆昗弨抣丅巔惃忣曬傪擖傟偰偄側偄偺偱傾儞僥僫埵憡拞怱/phase-windup曗惓偼惓妋偱側偄丅慡偔僠儏乕僯儞僌偟偰側偄偺偵3D RMS偱16cm丅埆偔側偄丅偙傟偵J2傑偱偺塣摦儌僨儖傪擖傟偰傾僶僂僩偵峉懇傪偐偗僗儉乕僕儞僌偡傞丅傑偩堦斒揑偱偼側偄偑偙偺曽幃偼Svehla偺尵偆"Reduced-Kinematic"朄偲屇傋傞敜丅偙偺曈偺峉懇偺偐偗曽偼僇儖儅儞偩偲鉟楉偵寛傑傞丅
塹惎偼堎側傞偑IGS LEO僉儍儞儁乕儞 JASON-1夝愅僙儞僞娫斾妑岆嵎偑RMS 3乣20cm側偺偱丄LEO婳摴寛掕惛搙栚昗偼JPL斾妑RMS岆嵎5cm(3D)偲偡傞丅
傾儞僥僫埵憡拞怱僨乕僞偑尒偮偐傜側偐偭偨偑Level1B Release Notes傪尒偰強嵼敾柧丅偦偺懠Level1B僶僌摍偺忣曬偑摼傜傟傞丅
.....................................................................................................................................
媥梴偺偼偢偩偑彮偟巇帠丅GRACE GPS娤應僨乕僞傪RINEX偵曄姺偟Kinematic
PPP應埵丅JPL 30昩Orbit/Clock巊梡丅尰忬栤戣揰丅
(1) 嬄妏傪巊偭偰Cycle-Slip僗儗僢僔儑儖僪偵廳傒傪偐偗偰偄傞晹暘偑RINEX僿僢僟偐傜奣嶼埵抲傪庢傟側偄偺偱惓忢摦嶌偟側偄丅
(2) (僐乕僪偵傛傞)扨撈應埵偱埵抲/庴怣婡帪寁傪媮傔偰偄傞晹暘偑(1)偲摨條偺尨場偱惓忢摦嶌偟側偄丅
偝偰奣嶼弶婜抣偑梌偊傜傟側偄応崌偺扨撈應埵寁嶼偼偳偆偡傟偽傛偄偐丅
.....................................................................................................................................
GRACE Level1B擖椡儖乕僠儞傪偝偝偭偲Matlab偱彂偄偰傒偨偑埬偺掕丄抶偡偓傞偺偱MEX偱彂偒捈偟丅byte-order傂偭偔傝曉偝偵傖側傜傫偟丄偲偰傕柺搢丅嵟嬤偙偆偄偆偺偵婥椡偑懕偐側偔側偭偰偒偨丅傑偢偄孹岦丅偟偐偟Matlab偼偪傚偭偲戝偒偄僼傽僀儖傪庢傝埖偍偆偲偡傞偲幚梡惈偑側偄丅側傫偲偐偟偰偔傟丅
拲暥偟偰偄偨杮偑撏偔丅
寧姧抧媴 崋奜No.25, GPS: 斈抧媴應埵僔僗僥儉 -抧媴僔僗僥儉僙儞僒乕偲偟偰偺揥奐-, 奀梞弌斉, 1999
彮偟屆偄榑暥廤丅GPS墳梡偵偮偒GPS婥徾妛,抧妅曄摦娤應偺椉柺偐傜僐儞僷僋僩偵傑偲傔傜傟偰偄傞丅姫摢偵偁傞揷拞愭惗偺彂偐傟偨擔杮偺GPS尋媶阾柧婜偺夞屭榐偑嫽枴怺偄丅
GRACE Data Procucts and Access偺Level 1 Read Software偐傜棊偲偣傞GraceReadSW_L1_2004-08-05.tar.gz偵偼GRACE
Level 1B僨乕僞撉傒崬傒梡C儔僀僽儔儕偑娷傑傟傞丅偦偺拞偺儐乕僥傿儕僥傿gps1x2rnx.e傪巊偆偲GRACE
GPS娤應僨乕僞傪RINEX偵曄姺偱偒傞丅僐儞僷僀儖/儕儞僋媦傃RINEX曄姺庤弴丅偲傝偁偊偢cygwin/gcc偱摦嶌妋擣丅
(1) GraceReadSW_L1_2004-08-05.tar.gz偺夝搥丄揥奐
(2) GRACEsyspath.h拞偺僷僗傪HeaderText.txt偑偁傞僨傿儗僋僩儕偺愨懳僷僗偵彂偒姺偊傞丅
(3) csh偑側偄応崌csh僗僋儕僾僩MakeLinkTime傪sh梡偵彂偒姺偊傞丅
(4) make
(5) gps1x2rnx.e -gps1x GPS1B_2004-01-01_A_00.dat
-rnx GRAA0010.04o
.....................................................................................................................................
2005/08/05
榑暥丄偦偺懠儕儞僋
D.Svehla, Kinematic and Dynamic Orbit Determination
of a Single LEO Satellite, Formation Flying
and Constellation of LEO Satellites Using
GPS, GFZ Potsdam, Oberpfaffenhofen, Munich,
Germany, 2005
僾儗僛儞帒椏丅GPS偵傛傞LEO惛枾婳摴寛掕(CHAMP,GRACE,COSMIC)偺惛搙丅ZD/DD
Kinematic, Reduced-Dynamic, Ambiguity夝寛桳柍,
KBR(Kband Ranging for GRACE) 摍忦審傪曄偊偨僔儈儏儗乕僔儑儞傪娷傓戝検偺夝愅寢壥丅偦偺懠D.Svehla娭楢榑暥偼戝晹暘偙偙偐傜摼傜傟傞丅
JPL, GRACE Data Procucts and Access
K.Case et al., GRACE Level 1B Data Product User Handbook, 2004
SC.Wu et al., Algorithm Theoretical Basis Document for
GRACE Level-1B Data Processing V1.1, 2004
GRACE偵偮偄偰偼僨乕僞偑堦斒偵岞奐偝傟偰偍傝丄儗儀儖1B偵JPL偑GIPSY偱張棟偟偨婳摴寛掕寢壥偑娷傑傟偰偄傞丅嶌嬈暘扴偑暋嶨偩偑Level1張棟偼JPL,
Level2張棟偼JPL,GFZ,CSR偺3幰撈棫偵幚憰偲偺偙偲(嶲徠)丅僨乕僞偼JPL PODAAC (Physical Oceanography Distributed Active
Data Center) 偲GFZ ISDC (Integrated System
Data Center) 偺椉幰偱傾乕僇僀僽偝傟傞丅
CHAMP偺婳摴寛掕寢壥偑側偐側偐庤偵擖傜側偄偺偱偲傝偁偊偢GRACE偱峴偭偰傒傞丅偨偩GRACE偼RINEX偺GPS娤應僨乕僞偑尒偮偐傜側偄偺偱儗儀儖1B擖椡儖乕僠儞偐傜彂偐側偔偰偼偄偗側偄丅
.....................................................................................................................................
壞媥傒丅
婣戭丅嵟嬤 ttaka@gpspp.sakura.ne.jp 宱桼偱撏偔spam儊乕儖偑憹偊偨丅懡暘web暸傪弰夞偟偰email傾僪儗僗傪帺摦拪弌偟偰傞傫偩傠偆偑壗偲偐側傜側偄傕偺偩傠偆偐丅
7/31偵憲偭偨CHAMP僨乕僞傾僋僙僗怽惪偺曉帠偑傑偩撏偐側偄丅怰嵏偱媝壓偝傟偨偺偩傠偆偐丅
.....................................................................................................................................
8寧梊掕
.....................................................................................................................................
| Home | by T.Takasu |
{kind=link}
{kind=link}