|
日記・備考録 |
2007 | 2008/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2009 |
| July | August 2008 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
September | Home |
.....................................................................................................................................
覚書。基準用にとっているKGPS/GPS姿勢計の精度 (1σ) 見積。当然FIX解のみの前提。
・位置: 水平0.3cm、垂直0.8cm (1km以内基線のKGPS
FIX解誤差より)
・速度: 水平1.4×0.3cm/0.25s=1.7cm/s, 垂直1.4×0.8cm/0.25s=4.5cm/s
(1階差分)
・加速度: 水平1.4×1.7cm/s/0.25s=9.5cm/s^2,
垂直1.4×4.5cm/s/0.25s=25cm/s^2 (2階差分)
・姿勢roll角: 0.8cm/85cm×180/3.14=0.54deg
・姿勢pitch角: 0.8cm/160cm×180/3.14=0.29deg
・姿勢yaw角: 0.3cm/160cm×180/3.14=0.11deg
各速度・加速度は4Hzで計算。1Hzにすれば時間分解能は下がるが精度は上がる。エポック間相関はないと仮定してsqrt(2)をかけているが実際は相関があるのでもう少し良いかも知れない。85, 160cmは姿勢計アンテナ間基線長。0.3, 0.8cmは測量級アンテナによる結果であり廉価アンテナを使っているので姿勢精度はもう少し悪いかもしれない。なおGPSで速度や加速度だけを求めたい場合Ambiguityを解く必要はない (搬送波位相差分を使って直接速度推定しても良いし、float解の時間差分をとっても良い)。ただしAmbiguityを解かない場合スリップ時に解が求まらない。KGPS差分はその点では少し有利になる。
GPS解とIMU解を比較する場合やGPS/INS複合航法計算では、GPSアンテナ位置とIMU取り付け位置の差を考慮しなければいけない。実験毎にこれを測り直すのは結構大変なので、アンテナとIMUをいったん板に固定して相対位置がずれないようにしてから、車のルーフに取り付けるといったことを行う場合が多い様だ。でもこれはあんまり格好が良くない。INS/GPS複合航法フィルタ中で推定してしまう手もあるのだが、ステートの数が増えてフィルタが不安定になりそうで最終的にどうしようか迷っている。
.....................................................................................................................................
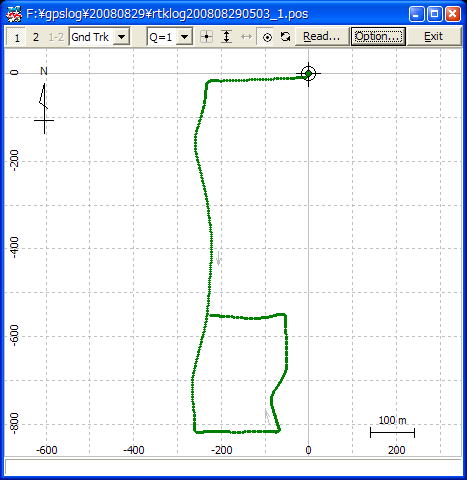
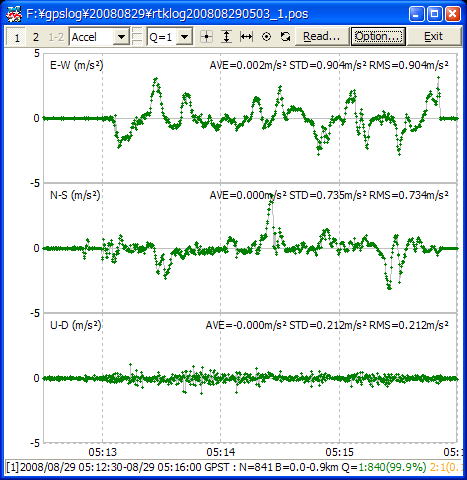
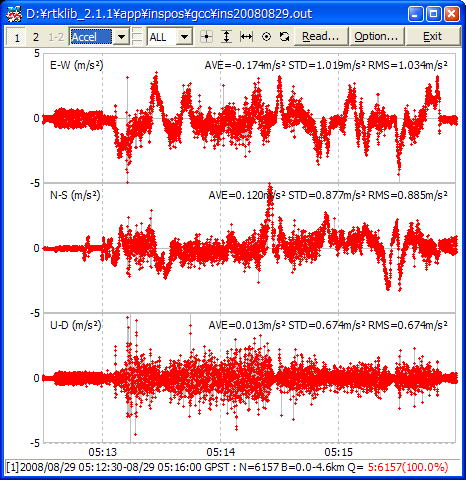
自動車に搭載したMEMS-IMUの挙動。構成は8/16参照。IMUを格納したケースをベルトで荷台に固定している。左:KGPSによる移動軌跡, 中:KGPS解2階差分計算による加速度, 右:IMU加速度計計測値。モデルによる重力加速度を引いて、IMUジャイロから計算した姿勢によりENU座標に変換している。見てすぐ分かるようにもの凄くノイズが大きい。INS単独航法ではこれを単純に2階積分して (コリオリは要補正) 位置を求めるのでまともな軌跡にならないのは明らか。想定していたよりずっと特性が悪い。これではちょっと使い物になりそうな感じがしない (ジャイロはもう少しはまとも)。
補足: 静止状態で測った加速度計ノイズが0.01~0.02m/s2 (RMS), カタログ値ノイズが0.05m/s2 (RMS) 。上のグラフのU-Dノイズを見るとその値より概ね5~10倍悪い。自動車走行時に車体にどういうスペクトラムの振動が発生するのかよく分からないが、エンジン振動やロードノイズを拾っている可能性もある。カタログに"Sensor
Resonant Frequency" という項目があり、この値が5.5kHzなのでこの周波数帯のノイズが入った場合は特性が悪化する可能性もある。緩衝材を使う等IMUの車体取り付け方法に工夫がいるかもしれない。(16:20追記)
上記くらいの性能しか出ないなら短期でも加速度計よりオドメータを使った方がよっぽど精度が出るだろう。ランダムノイズならフィルタをかけることにより特性改善可能だがどうも時定数の長いオフセット的ノイズも入っているようだ。静止特性を見て
(通常の道路走行環境でGPS信号欠落時間頻度が多い)
数秒程度ならRTK-GPSの補助に使えるだろうとふんでいたのだがちょっと見通しが甘かったかもしれない。(17:13追記)
.....................................................................................................................................
P.D.Groves, Principles of GNSS, Intertial, and Multisensor
Integrated Navigation Systems, Artech House, 2008
一度貼っているはずだが再度。INS/GPS複合航法参考書のお勧め。GPS/GNSS受信機や航法アルゴリズムの章だけでもコンパクトに要領よくまとめられている。Artech
HouseのThe GNSS Technology and Applications
Seriesの中の1冊で今年の春出たばかり。著者は英QinetiQ社の研究者の様だがGPS/GNSS技術に関する造詣の深さは驚くべきものがある。
-------------------
覚書。INS航法における姿勢角更新アルゴリズム。
以下の形の3x3 skew-symmetric matrixは(x,y,z)軸回りa=(a1,a2,a3) (rad) の微少角回転
(infinitesimal rotation) を表す。
| 0 -a3 a2|
A=| a3 0 -a1|
|-a2 a1 0|
この回転を以下のvector product operationとして表す。
Ab = [ a ^ ] b = a ^ b
b-frame → i-frame変換行列をCib 、b-frameにおける角速度をωbとすると
dCib/dt = Cib Ωb = Cib [ωb ^ ]
従って、t→t+τにおけるCibの更新則は
Cib(t+τ) = Cib(t) exp (integral Ωb dt) = Cib(t) C(+)
ここでαb= integral ωb dt (t→t+τの回転角) として
C(+) = exp([αb ^ ]) = sum ([αb ^ ] r / r !)
1次項だけとって近似すると
C(+) = I3 + [αb ^ ] = I3 + Ωb τ
4次項までとって近似すると
C(+) = I3 + (1-|αb|2/6)[αb ^ ]+(1-|αb|2/24)[αb ^ ]2
sin, cos関数により近似すると
C(+) = I3 + (1-cos|αb|)/|αb| *[αb ^ ] + 1/|αb|2*(1-sin |αb|/|αb|) [αb ^ ] 2
となる。1次近似はよく使われるが高速回転が入ると誤差が増大するので高精度更新には高次近似が使われることが多いようだ。ここは当然数値積分を使う手もあるが計算量がかなり増えるので航法計算に使うには少しCPU負荷が大きい。
b-frame→e-frame変換行列Cebの場合は地球自転の寄与項が入ってきて
Ceb(t+τ) = Ceb(t) C(+) - Ωe Ceb(t) τ
ここでωeを地球自転角速度 (rad) として
| 0 -ωe 0|
Ωe=|ωe 0 0|
| 0 0 0|
ここで地球自転項は1次近似だが自転速度は十分に小さいので必要十分。
補足: 以上は姿勢角をb-frame→e-frame (or i-frame,
n-frame) 回転行列Cebで表現した場合の手順。姿勢角をQuaternionで表す方法もよく使われる様でこの場合更新方法は異なる。(10:55追記)
b-frame→e-frameの場合地球自転項が入ってくるのを忘れていたので修正。(11:10追記)
.....................................................................................................................................
GPS Daily, Sony Expands US nav-u Personal Navigation
System Product Line, Aug 28, 2008
ソニーが新製品で米国のPND (Personal Navigation Device) 市場に参入するとのこと。ソニーは既に日本と欧州ではPNDの販売を行っているが米国では本格的な商品展開をしていなかったはずである。この記事によると世界のPNDメーカシェアはTomTom (蘭)
、Garmin (米) 、Mio (台湾) の順。日本ではSANYO
(ゴリラ)、ソニー (nav-u)、松下、パイオニア等がPNDを出しているが世界的なシェアは必ずしも高くない様だ。本格的なカーナビは高すぎるので買う気はないのだがPNDならそれ程高くないのでウチの車にも付けてみようかと検討したのだが、結局必要性があまりなくてまだ付けていない。GPS測位研究の面からも少し応用製品の知識も必要かなあとは思っているのだけど。(GPS受信機は回りに沢山転がっているのに、実はまともなGPS応用製品は一つも買ったことがない)
.....................................................................................................................................
TimesOnline, Lifelike animation heralds new are for computer
games, August 18, 2008
測位とは関係ない話。"Emily is not real"
とのこと。ちょっと見ると信じられないが、オレオレ詐欺用の技術進歩は凄いものがある。
.....................................................................................................................................
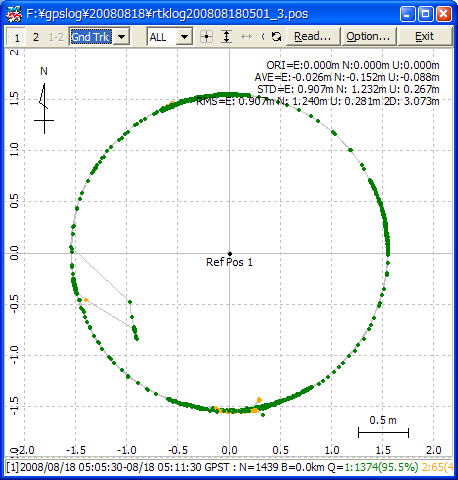
Doppler観測値を使って推定した移動体速度を使って受信機の時刻差を補正した結果。データは8/19と同じ。 時刻差に起因する震動がキャンセルされていることが分かる。 基準姿勢用データとしては概ね満足のいく結果なのでMEMS-IMUによる慣性航法アルゴリズムの実装に入る。
.....................................................................................................................................
移動体において姿勢計を複数GPS受信機を使って構成する場合、各受信機間の時刻同期に注意が必要である。すなわち受信機間のサンプリングタイミングの差が解に誤差として現れる。以下ubloxの例。各受信機のサンプリング時刻の推移 (s)。
ublox#1 : 0.999 1.247 1.499 1.747 1.999 2.247
...
ublox#2 : 0.999 1.251 1.499 1.751 1.999 2.751
...
時刻差は0.000, 0.004, 0.000, 0.004, 0.000, 0.004, ... 。約50km/hで移動しているので4msの時刻差の寄与は、50*1000/3600*0.004=0.056m。右拡大図で進行方向に振幅5cm強の振動が見られるのはこれが原因。この誤差を低減するには速度推定して時刻差を補正する必要がある。マルチアンテナの専用受信機を使う場合は気にする必要がないが、ubloxの様な廉価受信機を使う場合は気をつけなければいけない。
.....................................................................................................................................
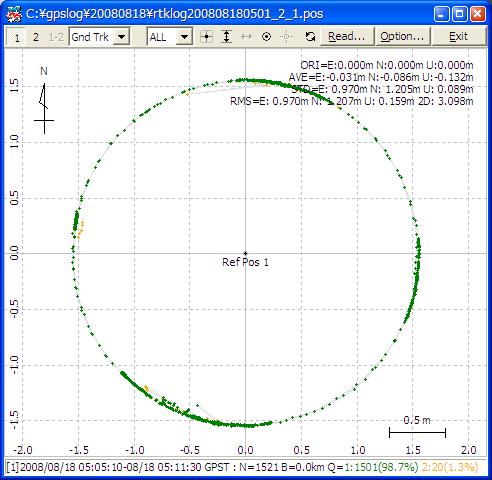
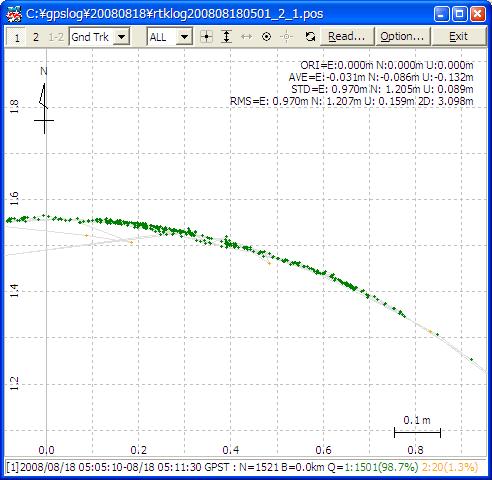
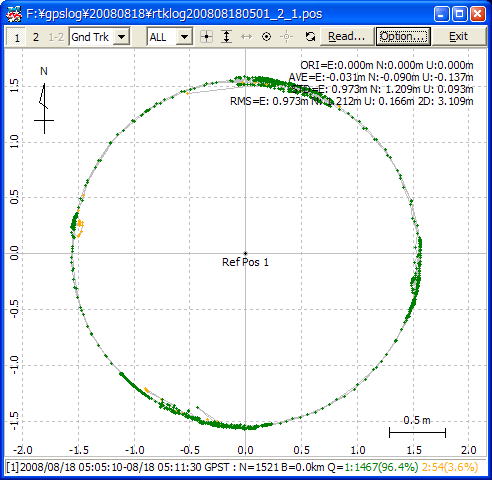
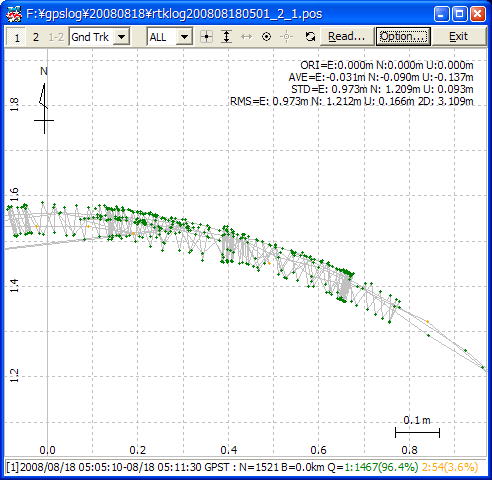
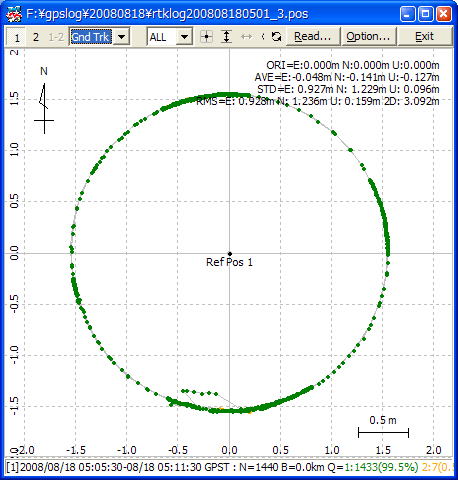
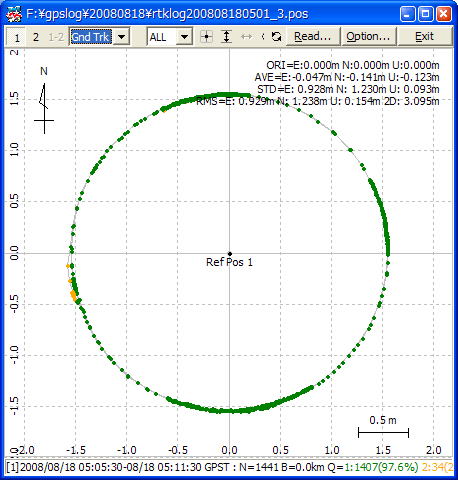
RTKLIBのmoving-baseモードで求めた移動体に固定した2アンテナの基線解
(4Hz x 6分)。基線長が1.5m位なので観測方程式の非線形性が大きく初期値に敏感でiterated
Kalman filterが必要だった。基線長の拘束を入れている
(入れないと性能が大きく落ちる)。左からiteration=0,10,30。アンテナはGPS-702-GGとANN-MS,
受信機はAEK-4T。アンテナの1つが小型パッチなので条件が悪い所で少しmis-fixが見られる。IMU評価用に使うために取ったのでジャイロは統合していない。やはり実用的なGPS姿勢計にはジャイロが必須だろうと思う。
なお非線形性が大きく収束性は必ずしも良くない。単純なiterated
Kalmanでは性能が出にくいかもしれない。
.....................................................................................................................................
ION向けGPS/INS統合測位実験のセットアップ。ublox AEK-4T x 3, NovAtel OEMV-3, ADIS16354。アンテナはNovAtel GPS-702-GG+Splitter, ublox ANN-MS x2。ロガーはPC (vaio) + 専用開発ロガーS/W。3つアンテナを載せるのは比較基準用姿勢データを取るため。本当は2式のubloxアンテナをGPS-701に取り替えたいのだけれど。


.....................................................................................................................................
N.Hjortsmarker, Experimental System for Validating GPS/INS
Integration Algorithms, FOI Swedish defence Research Agency Scientific
report, 2005
GPS/INS統合システムの測位性能評価。使用GPS受信機はNovAtel
Superstar II, MEMS IMUはBEC Navigation System社製MICRO-ISU
BP3010 (1600EUR=\259,000)。比較基準用にJavad
HD2 (マルチアンテナ) を使っている。Loosely-Coupled,
Tightly-Coupledの両者で評価しているがごく普通の手法である。きちんとIMU雑音のPSD計測をして他グレードIMUと比較しているのが参考になる。性能計測のためジェットコースターでデータを取っているのだが、どうも比較基準用のJavadが振動や高ダイナミクスに非常に敏感で、まともに評価が出来なかったらしく、最終的には車を使っている。内容の真偽未確認だがJavadは車でも少し加速度がかかるとスリップすると聞いたことがある。Javadは移動体測位に使うには問題があるのかもしれない。
.....................................................................................................................................
やっと論文査読2本完。2本目は結構手強い論文だったがとても勉強になった。さてION向けのネタ作りを急がねばいけない。少し焦ってきた。
.....................................................................................................................................
第52回宇宙科学連合講演会, 淡路夢舞台国際会議場, 2008/11/5-7
暫定プログラムがupされた。発表が最終日夕方になってしまったのでその日に帰るのは無理そう。もう1泊しなければいけないのはちょっと痛い。
-------------------
Special Issue on Bio-Navigation, Navigation
Journal of the Institute of Navigation, Summer,
2008
IONの論文誌Navigationの最新号が届いたのだけど、中身をちょっと見て最初何の雑誌かと思った。"Bio-Navigation"
すなわち生物航法技術 (?) の特集であるが取り上げているテーマが凄い。論文タイトルだけ書くと、「砂漠蟻の航法ツールキット」、「海亀の地磁気航法と磁気地図」、「動物及び移動ロボットのChemical
Plume追跡」、「煙及び赤外線による山火事航法:
"Fire-Loving" 甲虫の特殊センサ系」、「飛行昆虫の視線及び飛行安定化のための自己運動推定」、「甲殻類及び魚類における静力学圧力レセプタと深度の利用」。確かに興味深いのだけどほとんど生物学あるいは生物機構学
(?) といった内容でこれは工学ではないよなあ。IONは航法技術の学会なので確かにGPS/GNSS技術だけがその守備範囲では無いのだけど、ちょっとぶっ飛びすぎだとは思った。
-------------------
覚書。UKF (Unscented Kalman Filter) のオリジナル論文。
S.J.Julier et al., A New Approach for Filtering Nonlinear Systems, Proceedings of the American Control Confrerence,
1995
S.J.Julier et al., A New Extension of the Kalman Filter to Nonlinear
Systems, Int. Symp. Aerospace/Defense Sensing, Simul.
and Controls, 1997
ついでにKalmanの1960年Kalman Filterオリジナル論文。これはGoogle
Scholarで4534の引用がついている。良く使われるnotationと少し違うのでちょっと読み難いが、歴史的な意味のある論文なので目を通しておく価値はある。
RE.Kalman, A New Approach to Linear Filtering and Prediction
Problems, ASME Journal of Basic Engineering, 1960
.....................................................................................................................................
デジカメが出てきたので写真だけ貼っておく。左: Trimble Bullet IIIアンテナ。右: SiGe SN3S Sampler v2 (ケース除去済)


-------------------
Google Map, Street View
Google Map及びGoogle EarthのStreet Viewが日本域に対応した様だ。今のところ首都圏及び一部大都市圏のみ
(対応域一覧)。車に全方位カメラ積んで走り回ってデータベースに登録するだけだから、技術的にはどうってことないのだが、対応域に住んでる人にとっては勝手に自分の家を写真に撮られて一般公開されることになる訳で、決して気分が良いわけでは無いだろう。個人的にはやりすぎの様な気がする。(下は東京海洋大の正門前。Web頁に貼り付けるにはGoogle
Mapで「リンク」-「HTMLを貼り付けてサイトに地図を埋め込みます」を選べばよい。)
補足: 上記リンクはWindows版SafariとFireFoxではちゃんと表示されるが、IE7では正常表示されない様だ。(6:23追記)
Street View上でマウスドラッグすると上下を含めてほぼ全方位を眺められるので、データとしては360度視界の画像が登録されている様だ。太陽によるハレーションもうまく抑制されているしかなり良い全方位カメラが使われていると思われる。Street
View画像を自動解析してGPS測位の補助に使うみたいな研究も今後出てくるかも知れない。(7:17追記)
Street Viewに関しては日本に登場して3日しかたっていないのに既にネット上で多数の意見が見られる。全般的に否定派が多いようでこれは当たり前だろう。社会的な是非については今後他で論議されるだろうから、技術的なことだけ書くと、この写真やこの写真を見る限り、写真撮影用車はトヨタ プリウス、全方位カメラはPointGreyResearch Ladybug2、GPSはTopcon Legacy (アンテナはPGA-1?) あたりが使われている様だ。カメラは自動車ルーフに1m程度のポールを立てその先に固定している。結構目立つので既に幾つか目撃情報も報告されている。プライバシー問題対応で、画像認識技術を使って人物の顔に自動的にモザイクぼかしをかけているとのこと (参照)。これは高度な技術だと言えるが必ずしも認識精度が良いわけではない様だ。(11:54追記)
.....................................................................................................................................
Danish GPS Center, The softGPS Project
デンマークAalborg大Danish GPS Center (DGC)
のソフトGPS受信機プロジェクト頁。なお、DGCのセンタ長は A Software-Defined GPS and Galileo ReceiverのK.Borreである。SiGe GN3S Samplerを使ってGalileo (GIOVE-A) の信号を捕捉・追尾した例が示されている。GPS Signals and Receiver
Technologyに関するLecture Materialは、GPS受信機技術に関する大変分かりやすい教材となっている。
ところでこの頁からたどれるInternational Summer School on Global Navigation
Satellite Systemsのプログラムを見ると大変充実した密度の濃い講習・実習内容になっている。将来的には日本でもこういうプログラムが出来ればよいのになあとは思う。(例えば測地学会は学生向けのサマースクールを毎年開催している)
.....................................................................................................................................
安田, 衛星航法研究のメッカに, 東京海洋大学研究報告, 2008
Galileo測位信号の変調方式を色々と調べていたら、海洋大
安田先生が最近書かれた記事を見つけてしまった。安田先生が昔核融合研究をやっておられたとは初めて知った。
しかしまだMBOCとCBOC, TMBOCの関係がよくわからん。というのも
GIOVE-B Signal Observations Confirm MBOC's
Multipath Advantage, Inside GNSS, 2008
という記事を読んだからで、これを読む限り、MBOC
(Multiplex Binary Offset Carrier) 変調というのは単に複数のBOC変調を多重することしか規定していないので、その実装方法にはCBOC
(Composite BOC: Galilieo E1が採用)、TMBOC
(Time-Division-Multiplex of BOC: GPS L1Cで採用)
の2種類がある、という様に読める。多分これは多重方式の違い
(SuperpositionかTime-Divisionか) ということなのだろうが、疑問は受信機側でGalileo、GPS
L1Cを両方受信した場合どうやって分離するのだろうかという点にある。あとせっかく欧州/米国間の相互運用性協議でGalileoとGPS L1Cで変調方式を統一したのに、何故異なる実装をするのかも理解できない
(欧州が米国と合わせるのを嫌がったという可能性が高いが)。新しい測位信号の変調方式は複雑でなかなか理解が難しい。
J-A.A-Rodriguez et al., The MBOC Modulation: A Final Touch for the
Galileo Frequency and Signal Plan, Inside GNSS, 2007
Galileo信号プランの変遷と最終的にE1 OS (Open
Service) にMBOCが採用された経緯について大変良く書かれた記事。最終的なGalileo信号仕様のよい解説にもなっている。"MBOC
is the culmination of a titanic work and
long studies carried out since the Galileo
program started" とある。これを読むとGalileo信号設計の担当者は長期にわたる膨大で困難な仕事を成し遂げたことが分かる。MBOC
(6,1,1/11) は色々な制約の中で最適に近い選択なのだろうが、他の方式と性能面で劇的に違うわけでもないので、なんかもっと単純な方式にした方が良かったのでは、と思わないこともない。
.....................................................................................................................................
.....................................................................................................................................
| Home | by T.Takasu |