|
日記・備考録 |
2007 | 2008/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2009 |
| February | March 2008 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
April | Home |
.....................................................................................................................................
連合大会のプログラム決定。少し本格的に内容を進めなければいけない。(まだWebサイトには詳細プログラムはupされていない)
タイトル(日本語) : 低価格一周波受信機を使ったRTK-GPS性能の評価、課題とその解決策
著者・発表者 : 高須知二
講演セッション : D106 測地学一般
講演形態 : オーラル
講演日時 : 05月29日 16:45 - 05月29日 17:00
3/15に打ち上げられたGPS PRN07/SVN48が、打上後10日で正式運用となった様でGPSWorld誌も今までの最短記録だとしている。こういうのを見ていると衛星開発・運用における日本と米国との技術力の差を実感してしまう。
.....................................................................................................................................
G.Weber, Real-Time GNSS EUREF-IP Project, EUREF London Technical Working Group, 2007
EUREF (IAG Reference Frame Sub-Commission for
Europe) のリアルタイムEUREF-IPプロジェクト。EUREFが運用する欧州GNSS基準局網のリアルタイムデータをRTCM/NTRIPによりインターネット放送する
(www.euref-ip.net)。ストリームテーブルを見ると基準局は100局強で、プロトコルはRTCM2と3が半々と言ったところである。なおNTRIPデータ放送を受信するにはユーザ登録が必要になる。RTNETによるリアルタイム衛星クロックも既に作成・放送している様でその精度評価結果もある。RTCMのSSR
WGについても少し触れている。
IGSリアルタイムパイロットプロジェクト (IGS-IP)
によるNTRIP放送 (www.igs-ip.net) のストリームテーブル。IGSでは観測データとして標準ではRTCMではなくSOCと呼ぶ形式を採用している様だ。有償・無償に係わらす全部合わせると全世界で既に100局近い公開NTRIP放送局があり、2000局以上のGNSSデータがリアルタイム放送されているが、日本の局が1局も含まれていないのは全く寂しい限りである。
補足: 日本でも大学・研究機関等、固定アンテナ・受信機でpermanentにGPS/GNSS信号を受信している所は多数あると思うが、これらがリアルタイム観測データをNTRIPを使ってインターネット公開して、それらを相互利用できるようなボランティアGPS/GNSS基準局ネットワークが出来上がると、色々と面白い応用が有り得るのになあ、という気はする。3/26追記
.....................................................................................................................................
ブラウザをIEからSafariに変えてみた。縮小画像がちゃんとバイキュービックでリサンプリングされるし、フォントレンダラも綺麗である。上部メニューバーも場所をとらないしなかなか良い感じである。ちょっと使ってみよう。
Safari 3.1(左) vs IE 7.0(右)
.....................................................................................................................................
3/15に打ち上げられたPRN07/SVN48の信号受信を3/19 17:00GPST過ぎのパスで確認。ただまだ衛星ステータスはunhealthyとされている。PRN07の信号送信に先立ち3/17 22:00UTCに、PRN01/SVN32がdecomissionされた (NANU2008028, 2008030)。 この理由は公式には明らかにされていないがGPS World誌によると、現在のGPS control segmentは32衛星の同時運用で問題を起こすらしく、そのため古い衛星の運用を止め予備に回したのではないかということだ。ということで、GPS32衛星の同時運用は当分実現されない可能性が高い。
NICT, 世界最速、地球の自転をほぼリアルタイムに計測
- 宇宙空間における地球の位置決定の精度向上に貢献
-, 平成20年3月19日
別にいちゃもんを付けたい訳ではないのだが、「...
GPSなどの人工衛星の軌道の予測精度が、現在の1メートル程度から10センチメートル以内まで向上することが見込まれ、...」というのは本当だろうか? 少なくとも現在のGPSの放送暦精度が1~2mであることは確かだが、その誤差の90%以上が地球自転速度の不確定さに起因しているということはないはずである。またIGU予報値の公称精度10cmを見ても分かるようにVLBIが無くてもGPS軌道予測精度10cmは達成できる。実はこれはGPS単独でもリアルタイムで地球自転速度を決定できているからに他ならない
(自転角絶対値は今のところVLBIでしか精密決定できないが)。報道発表だからキャッチーな見出しを付けたいのは分かるが研究機関なのだから専門家からみて?と思うような発表は逆に信用を落とすだけの様な気がする。
.....................................................................................................................................
The International GNSS Service (IGS): Perspectives and Visions for 2010 and Beyond - IGS Workshop 2006 Proceedings, Darmstadt Germany, 8-12 May 2006
今更という気もしないことがないがIGS WS 2006のproceedingsがやっとupされた。
一昨年11月の大きな解析仕様変更前の区切りのIGS WSということで興味深い論文や発表が多かったようだ。少し時間をかけて読んでみたい。
BBC News,
Galileo demo sat to be despatched, 6 Mar 2008
Galileo試験衛星の2号機GIOVE-Bの打ち上げが4/26に予定されている。
GPSに比較したGalileoの技術上の特徴がパッシブ型水素メザーを積むことだが、GIOVE-Bにはこの
原子時計が搭載され軌道上検証が行われる。この記事によるとGIOVE-Bは実Galileo衛星と95%同一
とのこと。2010年位から順次実Galileo衛星の打ち上げが始まり、2013年末にFOC30機構成とする
予定だが、どうも資金面の決着が完全にクリアになっている訳でもない様でスケジュールはまだ流
動的である。2種類の打ち上げシナリオ案があるが、Arian5クラスのロケットを使う場合は6機同時
打上になるらしい。これは逆に1回の打上失敗で6機の衛星が失われる訳でリスクの大きい案でもあ
る。ただGIOVE-Bが上がればGalileo計画も本格的に動き出すという雰囲気ではある。
.....................................................................................................................................
手持ちの一周波アンテナ最後、Garminを買ったときに付属してきたMS-555というアンテナ、なのだがトラブル発生。このアンテナをOEM-Vに接続すると信号が受からないだけでなく、隣にあるGPS-702に繋いだOEM-Vの信号も全部受からなくなる。このアンテナをublox 5に繋ぐと正常に受かるので、アンテナ供給電圧が合わずLNAが発振して隣のアンテナ(GPS-702)を妨害しているっぽい。OEM-Vはアンテナ供給電圧をコマンドで変更できたかもしれないが、調べている時間がないので、実験中止。詳細は後から調べる。

.....................................................................................................................................
Inside GNSS, Another Successful GPS Launch, Plan Produce
Back-Up and Improved Capability, 15 Mar 2008
2008/3/15 6:10 UTC、6機目のGPS Block IIR-M衛星
(IIR-M(19)、SV49/PRN7)、米国ケープカナベラルからデルタ2ロケットで打上成功。今後6/8及び9/8にBlock
IIR-M衛星の打上が予定されておりその次はBlock
IIFとなる。なお、2013-14年に最初のBlock III衛星が打ち上げられる頃には、Next
Generation GPS control Segment (OCX) が稼働し32機以上のGPS衛星の同時運用が可能になるとしている。
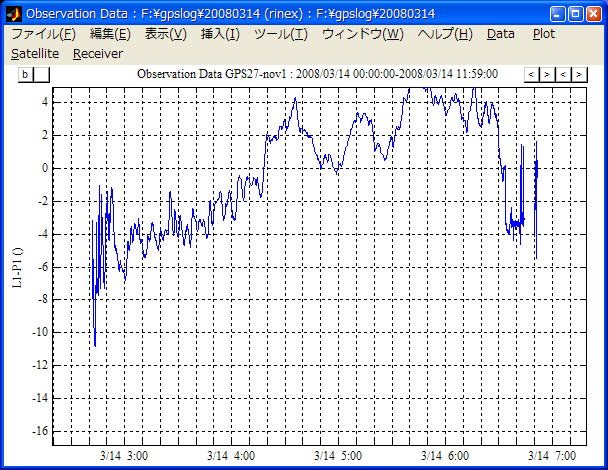
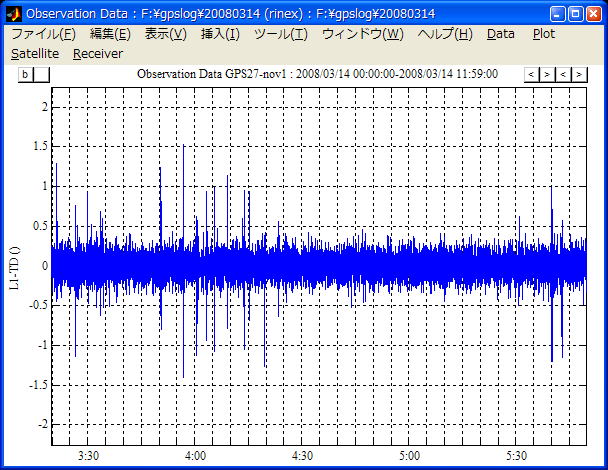
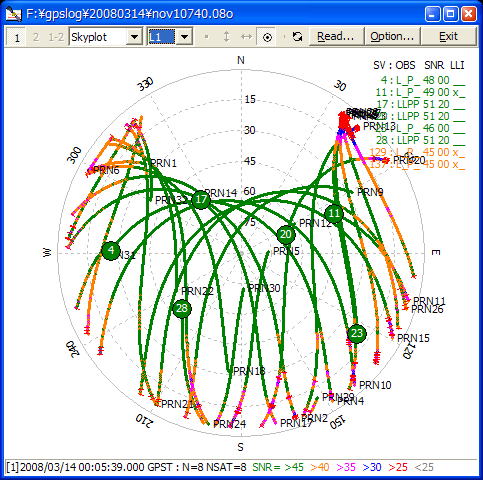
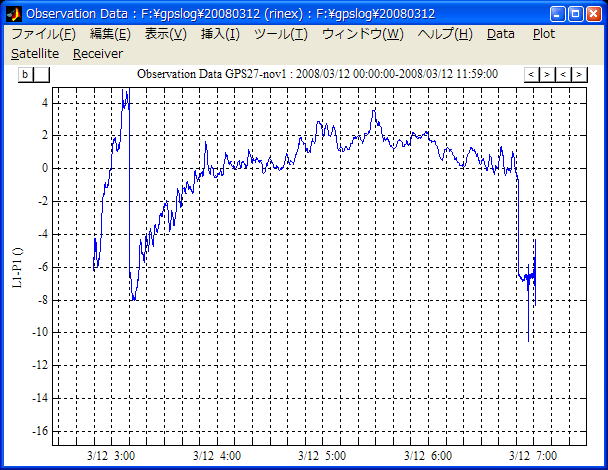
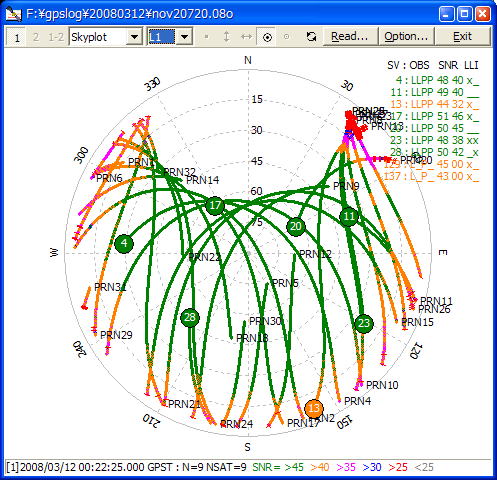
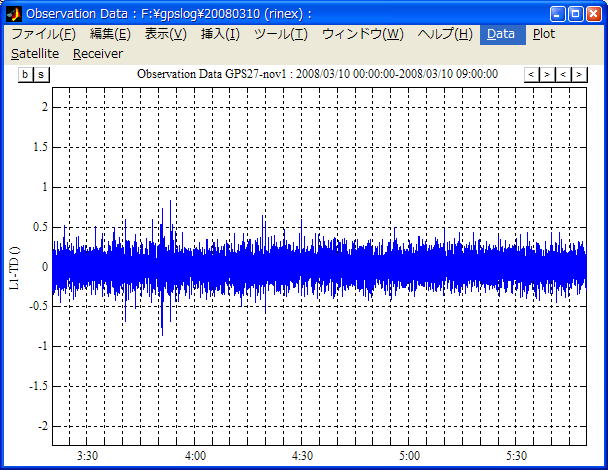
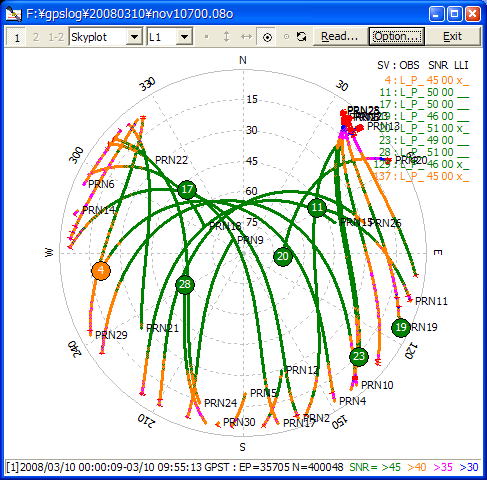
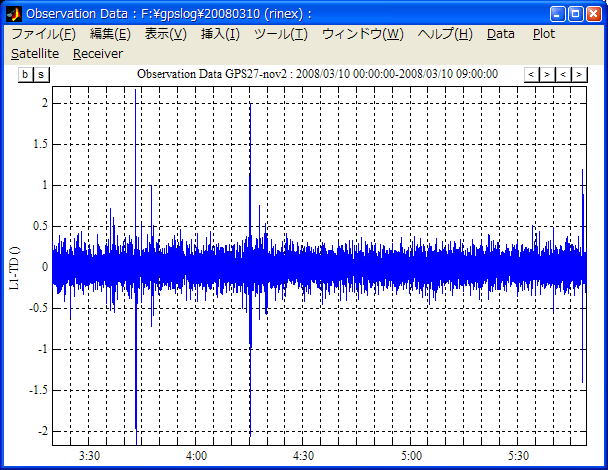
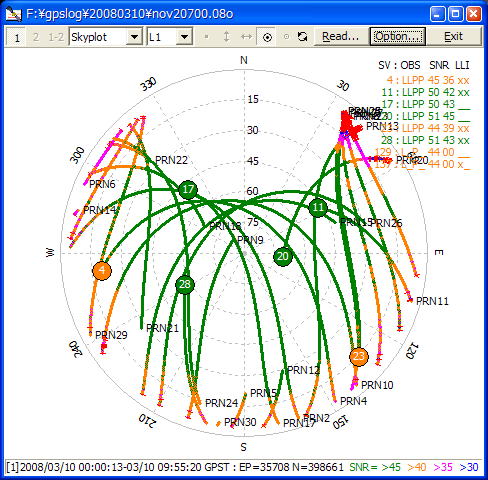
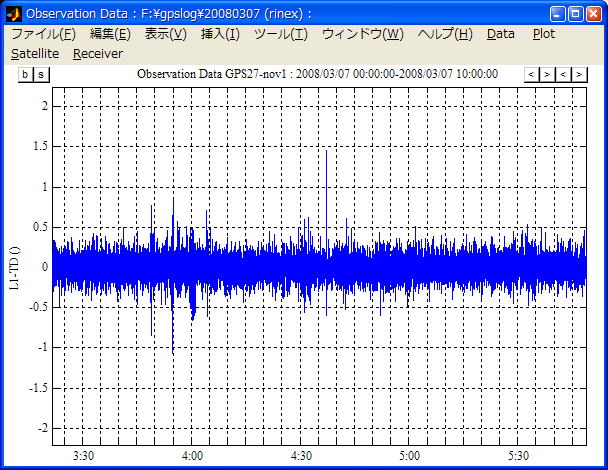
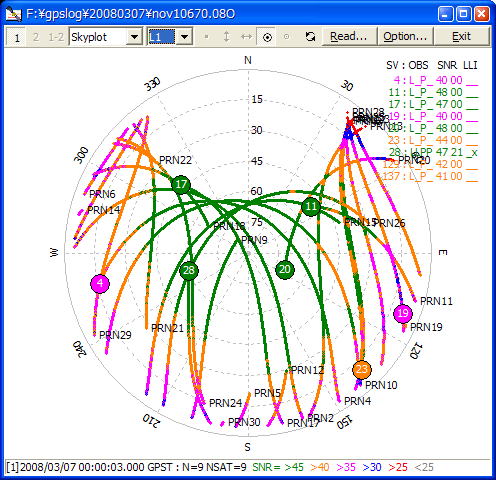
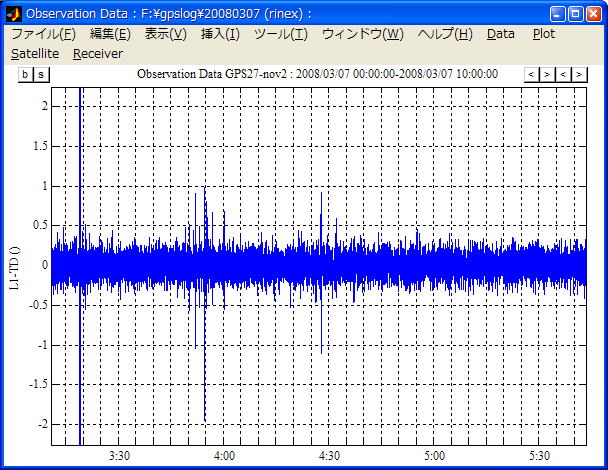
GPS-M1ZZ受信機付属アンテナとGPS-702の比較。受信機は両者ともNovAtel OEM-V。今までで最悪のマルチパス特性である。どうせやっても仕方ないからと思って携帯内蔵の超小型アンテナは評価予定が無かったのだが、これを見ると怖いもの見たさで評価したくなってきた。
| マルチパス(P1-L1) | 位相雑音(L1-TD) | 信号強度(C/N0) | |
| GPS-M1ZZ受信機 付属Ant |
 |
 |
 |
| GPS-702 | 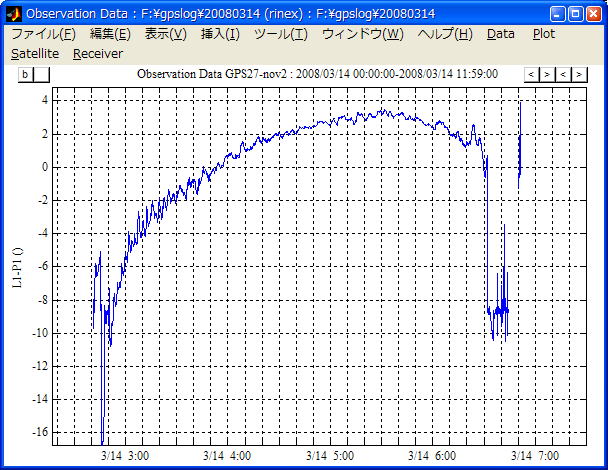 |
 |
 |
.....................................................................................................................................
第3回QZSSユーザミーティング開催報告, 2008/3/10
今週月曜日に東京海洋大で開催されたQZSSユーザミーティングの資料がupされている。今まで殆ど情報のなかった国土地理院によるLEXを使ったネットワーク型RTK-GPS補正実験の資料が含まれている。
ネットワーク型RTK-GPS実験の配信(放送)情報としては、基準点観測値(12領域代表点、L1疑似距離+搬送波位相、8衛星分)
30秒間隔、衛星軌道・時計 (リアルタイム精密暦)
240秒間隔、対流圏遅延補正 240秒間隔、電離層遅延補正
(12領域格子化衛星毎) 240秒間隔であり、合計データ容量が約1.7kbpsとしている。
1周波受信機による15分以内の静止点精密測量を目標としている様だが、その実現方法は疑問点が多い。すぐに思いつくものとして
(1) 12基準点では最大基線長約150kmになり衛星軌道や電離層・対流圏を補正したとしてもまともな精度が出るかは疑問である。またL2観測値が使えないので整数バイアス決定も性能が出ない可能性が高い。
(2) 衛星軌道情報が240秒間隔であり8次の補間・補外を使っても9回分30分程度軌道情報を貯めないと利用できない。
(3) 衛星時計情報を送信する意味が不明である。
(4) 電離層補正情報更新頻度が240秒間隔であり、電離層遅延の時間変動を考えると補正時刻近辺の測定値しか測位に使えない。(これは電離層時間変動が十分な精度でモデル化できるとの目途があるのかもしれない)
回線容量の制限から、リアルタイム性や移動体測位を切り捨てたことは理解できるのだが、正直言って技術的フィージビリティについてもう少し検討した方が良いのではないか、と思う。多分方式設計に当たって予備評価はしているのだとは思うが、太陽活動活発期の過去データでどの程度実用性があるのかは最低限ちゃんと確認してほしい。
..................
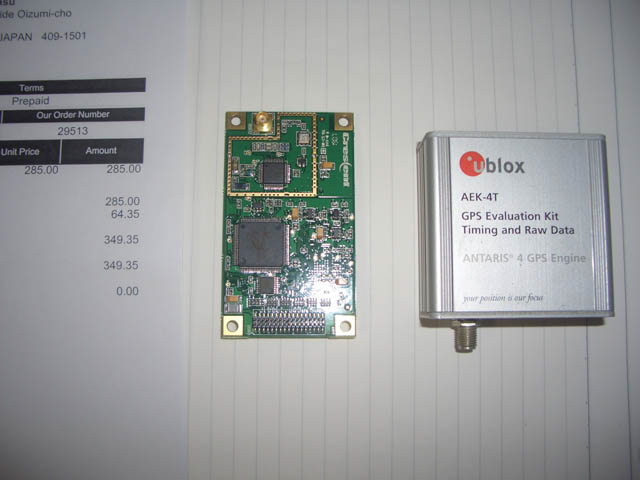
1周波RTK-GPS評価用にHemsphere Crescent OEM board購入。$285+$64.35 (shipping) 也。DGPS用受信機やGPSコンパスに内蔵されているものと内容は同一の様だがオプションを付けていないので出力は1Hzまでのはずである。マニュアルが付いていなかったのでweb検索。カナダのGPSディストリビュータのサイトでIntegratorマニュアルを見つけた。あとはMagellan (Thales) AC12を購入予定。
.....................................................................................................................................
V.Schwieger, High-Sensitivity GPS - the Low Cost Future
of GNSS?!, Internatinal Federation of Surveryors Article
of the Month, 2007
低価格高感度受信機の評価。SiRF start III,
u-blox LEA-4T, Fastrax iTrax 03の各種環境での評価。後半低価格受信機位相測定値による精密測位評価がある。受信機はGarmin
eTrex Vista (チップはSiRFstarII)。1.1km基線、30分観測データの後処理で水平位置標準偏差1.5cm。ただしGarminにはhalf-cycle
ambiguityとサイクルスリップの問題があり特別の解析ソフトが必要としている。キネマティックでも120m基線で水平1cm以下の精度が出ている様だ。アンテナについては触れていないが小型パッチを使っているのだろうか。
今、屋根上に上げているアンテナでは約1mの超短基線でも全然性能が出ていないのだがもしかすると解析の仕方が悪いのかもしれない。これは今後ちゃんと原因を分析する予定。
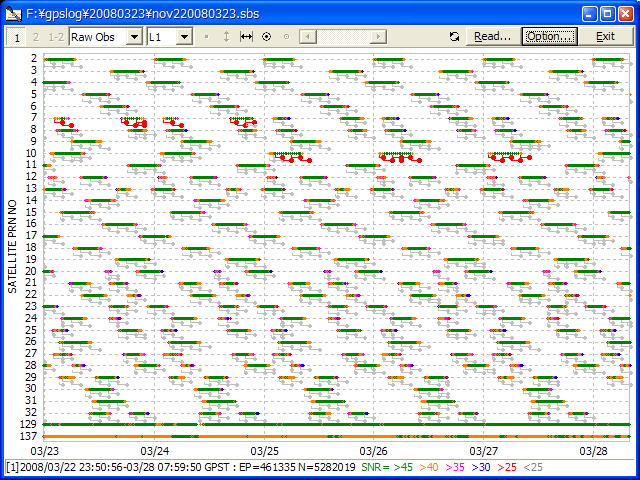
また屋根上のアンテナ選手交代。型番不明だがPionieer GPS-M1ZZ受信機付属のもの。アクティブかパッシブかも不明だが信号強度は特に問題ない様だ。今のところOEM-Vで24H、u-box 5で24Hのサイクルでデータを取っているのだが、一回りしたらちゃんと評価方法を確立して、再度ローテーションする予定。あとどれか一つアンテナを固定して、受信機側を廉価1周波受信機でローテーションするつもり。ホントは180度水平回転したデータも取りたいのだけれどちょっと間に合わないかもしれない。

.....................................................................................................................................
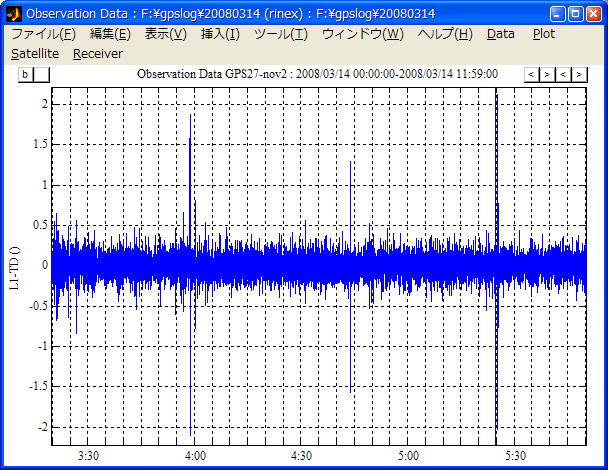
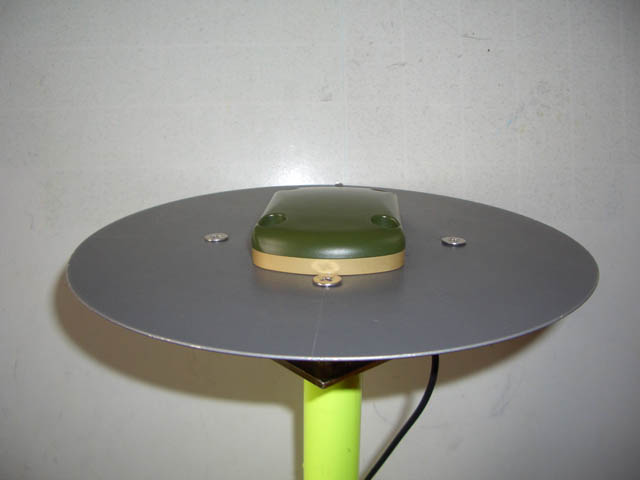
また屋根上のアンテナ選手交代。Micro Pulse GPS-TMG-40Nという"timing reference antenna"。Navtechで$219。マウント金具が付いているのだけど穴位置がずれていたりして使えなかったので、写真のようにいい加減に固定している。グランドプレーンもむしろ悪さをしそうなので付けていない。ANT-N:N-TNC:TNC-SMA:SMA-RG174(3m)-SMA:SMA-TNC:TNC-RG58(10m)-TNC:TNC-OEM-Vという接続なので、少しコネクタのロスが心配だったがあんまり問題ない様だ。

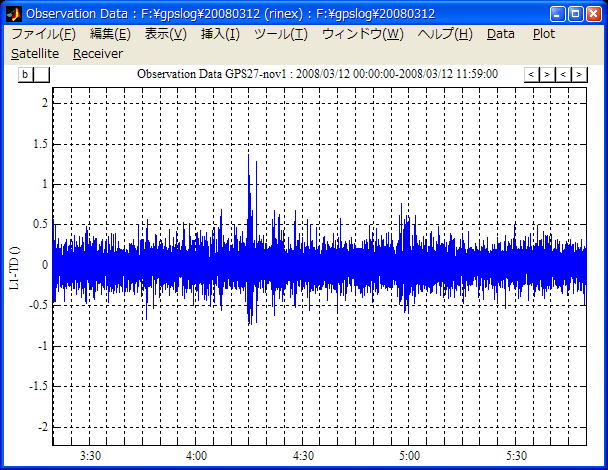
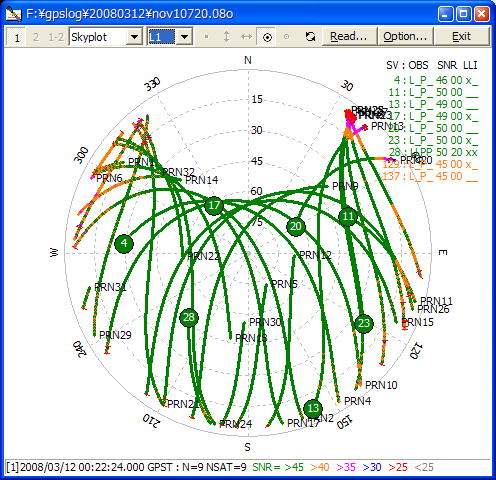
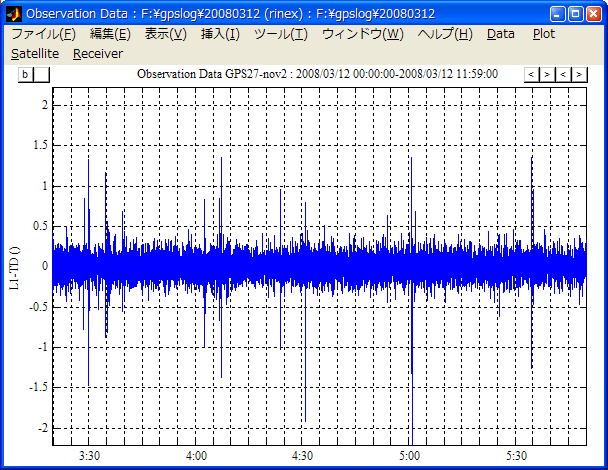
Micro Pulse GPS-TMG-40NとGPS-702の比較。受信機は両者ともNovAtel OEM-V。Micro Pulseは低い仰角のC/N0が非常に高いがこれはアンテナ構造に起因するのかもしれない。ただやはりマルチパスに関してはGPS-702との差は大きい。
| マルチパス(P1-L1) | 位相雑音(L1-TD) | 信号強度(C/N0) | |
| Micro Pulse GPS-TMG-40N |
 |
 |
 |
| GPS-702 | 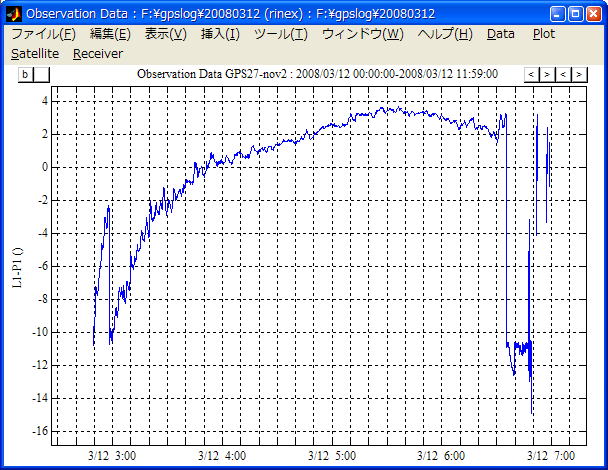 |
 |
 |
.....................................................................................................................................
ちゃんとしたアンテナ評価のために少しGTの機能追加。まず2周波観測値からスラント電離層遅延を求めるルーチン。高精度化のためには単純な線形結合ではダメでPCVやphase windup補正を入れる必要がある。なんかmatlabプログラムの書き方を結構忘れている。
.....................................................................................................................................
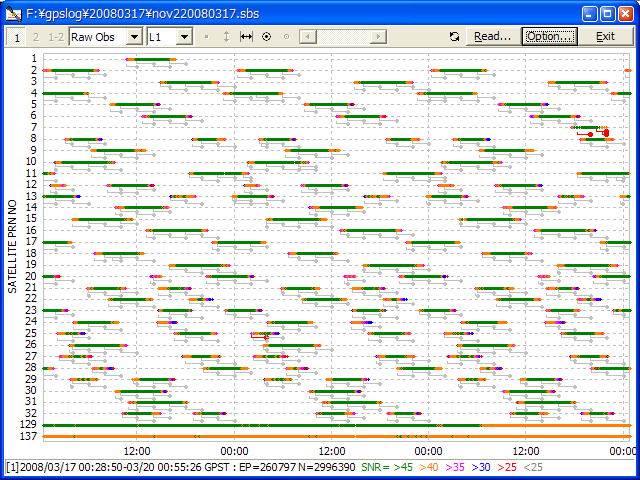
また屋根上のアンテナ選手交代(左)。PcTel 2335TBという"vehicle tracking antenna"と謳っているもの。Navtechで$47.45。(右は3/7から上げているAntcom 4G15A2-XS-3) 最初、信号が入らずあせったがコネクタを締め直したら正常に入るようになった。どうも接触不良だった様だ。

PcTel 2335TBとNovAtel GPS-702の比較。受信機は両者ともNovAtel OEM-V。PcTelはマルチパスが酷いがC/N0は他アンテナに比較し高い。
| マルチパス(P1-L1) | 位相雑音(L1-TD) | 信号強度(C/N0) | |
| PcTel 2335TB | 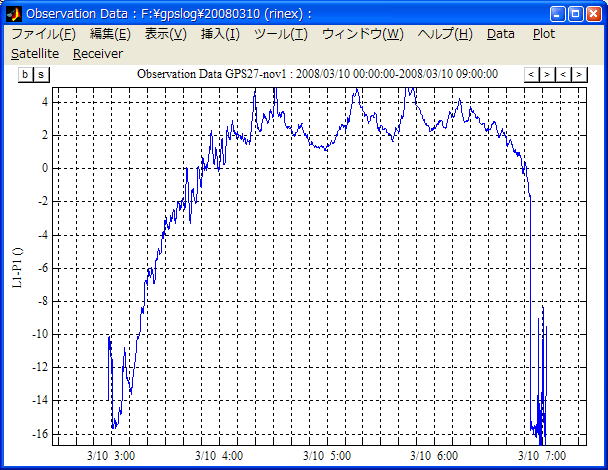 |
 |
 |
| GPS-702 | 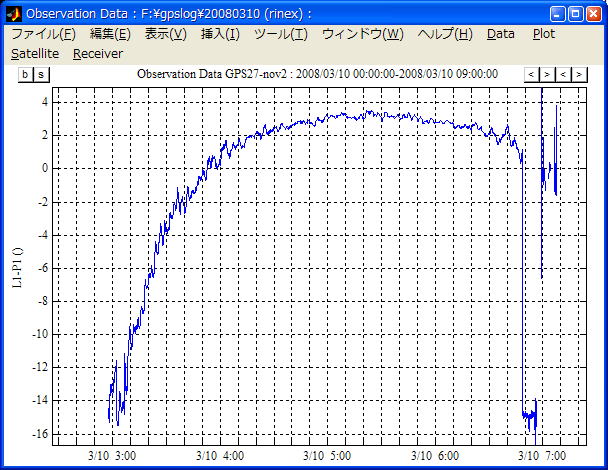 |
 |
 |
瀧口他, 高精度GPS移動測位技術を利用した移動監視システムとモービルマッピングシステム, 第25回日本ロボット学会学術講演会, 2007
RTK-GPS及び複合センサの実応用という面ではほぼ先端の成果。RTK-GPS+カメラ画像認識による白線位置とGPS測量で求めた位置の比較をして1σ10cmの精度が出ている様だ。移動体GPS測位の精度評価は大変難しいのだが、そこをきちんと実証した点でも貴重な研究だと思う。やはり上空視界の良い所でしか評価していない様だが障害物の多い環境でどの程度実用性があるのかは大変興味のあるところではある。
補足: この論文ではMMSのセンサ構成詳細がよく分からないが、別の論文によるとGPS: Trimble BD950(二周波)+ublox
x 3、MEMS IMU: Crossbow AHRS400、FOG: JAE
JG-35FD、CCDカメラ x 3、Laser scanner SICK
x 2の構成らしい。
D.A.Grejner-Brzezinska et al., High Accuracy Dynamic Highway Mapping Using
a GPS/INS/CCD System with On-The-Fly GPS
Ambiguity Resolution, The Ohio State University Ohio Department
of Transportation, 2004
RTK-GPS+IMU+カメラによるMMS。元々は高速道路測量が目的の様。将来的にもっと安価になれば自動車の航法や走行制御にも使える様になるかもしれない。
.....................................................................................................................................
3/7に、勢いで「衛星による広域ネットワークRTKは回線容量の点でまだ実用的でない」と書いてしまったが、本当かどうかちょっと考えてみる。日本の既存ネットワークRTKサービスでは約300局の電子基準点を使っているので、まずこの観測データを全部送ることを考える。観測データを圧縮効率の高いRTCM3.1 msg1003で送るとして、データ量は1局1エポックあたりで8+12.625x衛星数 (B)。最大衛星数を12として1Hzで送信すると (8+12.625x12)x1x300x8=382.8kbps。基準局座標やアンテナパラメータは十分低い頻度で送るとしてデータ量は無視できるとする。あと基準局間基線の整数バイアスを解いて事前に位相観測値のlevelingを行えばMAC用補正データmsg1014/1017も要らない。従って現行技術でも400kbps弱くらいには収まる。さてこれを何処まで削減できるかだが、更新頻度を0.2Hzにしても性能はあまり落ちないはず (この辺はI君の研究が参考になる) なので0.2Hzにして80kbps。次に全観測値から衛星時計変動成分だけ抽出して残りの更新頻度を30s間隔にする。これで概ね30kbps。この辺が限界かなあ。今は太陽活動極小期なので30s間隔でも良いがあと数年すると30s間隔では少し厳しいかもしれない。RTCMで検討中のSSRが実用化されればもう少し削減できるかもしれないが技術的には難しい点が多い。以上、2kbpsでは無理だが数10k~100kbpsあれば日本全土をカバーする広域ネットワークRTKサービスは可能になりそうだ。この程度の帯域であれば (事業としてペイするかどうかは別だが) 技術的には衛星放送で送っても小型アンテナで十分受けられるだろう。でもやはり電波の利用効率を考えると北海道では必要ない沖縄のデータも一緒に送らなければいけないのは少し抵抗がある。
G.Wubbena, RTCM State Space Working Group - Mission
Statement, April 2007
RTCMのSSR WGは今どうなっているだろう、と思って見つけた資料。その他RTCM
SC-104のワーキングペーパーはここで得られる。NTRIP ver.2も既にdraftになっているようだ。
.....................................................................................................................................
B.M.Scherzinger, Precise Robust Positioning with Inertial/GPS
RTK, ION GPS 2000
C.Almayer, Enhancing the Integrity of Integrated GPS/INS
Systems by Cycle Slip Detection and Correction, IEEE Intelligent Vehicles Symposium 2000
H.K.Lee et al., Effective cycle slip detection and identification
for maintaining high accuracy of GPS/INS
integration systems, SatNav 2003
IONに出したアブスト関係で既存の論文をGoogle
Scholarで検索。完全に泥縄。似たような研究はないことはないが、そんなに決定版というのは無いようだ。アブストが通れば夏までに少し頑張ってやるつもり。
今、屋根上の評価アンテナにublox 5を繋いでデータを取っているのだがどうも搬送波位相測定値が符号反転しているっぽい。これはF/Wのバグ?
あと学部N君の卒研で高感度受信機(多分これはublox)の疑似距離と搬送波の時刻不一致を指摘しているのだけど、うちのublox-4,
5ではそんな症状は出ていない。これはF/W versionの違い?
それともN君の誤解? (うちのubloxは定期的にclock steeringして、かつphaseは飛ばないタイプで、時刻不一致は特に見られない)
.....................................................................................................................................
Inside GNSS, Astrium-Allsat JV Lanches GNSS Reference
Network Services accross Europe, 6 Mar 2008
最初は、衛星を使って欧州全体をカバーするネットワークRTKサービスを開始するのかと思ったが、良く読んでみると別に衛星放送を使うわけではない様だ。ドイツ国内のみのサービスをAXIO-NETという名前で欧州全域に拡大するというだけの話のようだ。まあ衛星による広域ネットワークRTKは、回線容量の点で現行技術ではまだ実用的でないわけで、当然な話ではある。ところでQZSSのネットワークRTK実験は2kbpsでいったい何をやるのだろう。
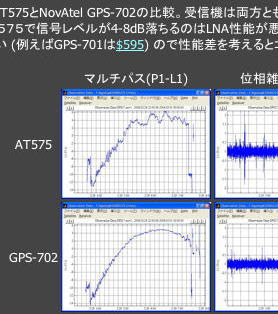
Antcom 4G15A2-XS-3とNovAtel GPS-702の比較。受信機は両者ともNovAtel OEM-V。AntcomはMini-Arinc型という航空機用、Navtechで$194のもの。やはりGPS-702に比較しC/N0が3-4dB低い。
| マルチパス(P1-L1) | 位相雑音(L1-TD) | 信号強度(C/N0) | |
| 4G15A2-XS-3 | 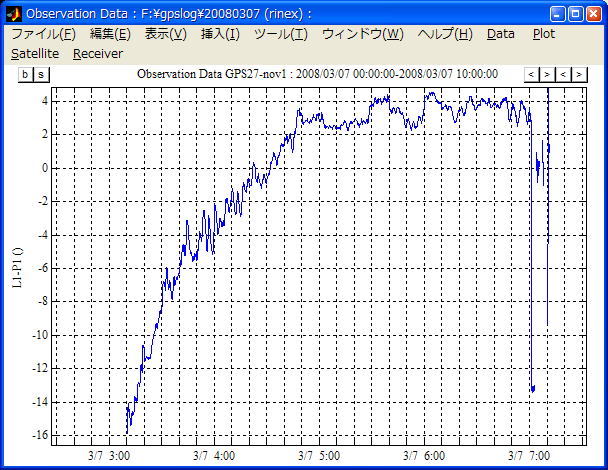 |
 |
 |
| GPS-702 | 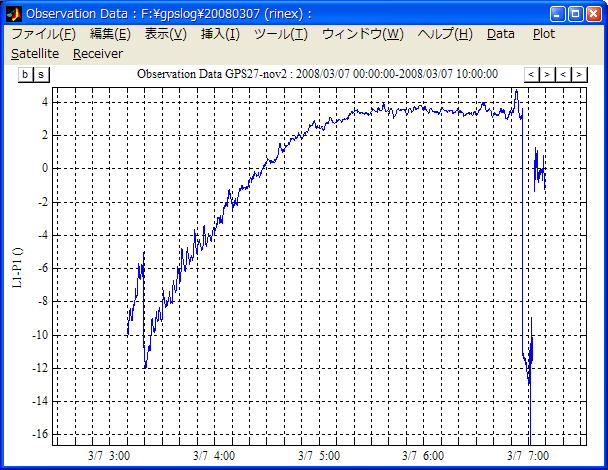 |
 |
 |
.....................................................................................................................................
T.Takasu et al., Cycle slip detection and fixing by MEMS IMU/GPS
integration for mobile environment RTK-GPS, ION GNSS 2008 submission
間に合わないかと思ったがとりあえずギリギリで出すには出した。確認メールにSubmitted
on 03/05/2008 at 21:34:12 (ET) となっているので時刻はET
(米国東部標準時: UTC-5) で測るらしい。
.....................................................................................................................................
MEMS IMU予備評価続き。推定したジャイロバイアス補正を入れて静止状態の角速度計測値を60s積分した結果。2/26とはサンプリング速度 (100Hz) とフィルタ定数を変えている。動特性が静特性より良くなることはないだろうから30sで0.5~1度といったところがこのMEMSジャイロ
(ADIS16354) の実力値だろう。windowsで100Hzで計測値を取り込むためマルチメディアタイマを使っている。
3/2の表でいえばTacticalとAutomotive Gradeの境目あたりで、目的次第だが使えないことはないかなあ、という感じではある。動特性についてはこれからKGPSを基準にして評価する。
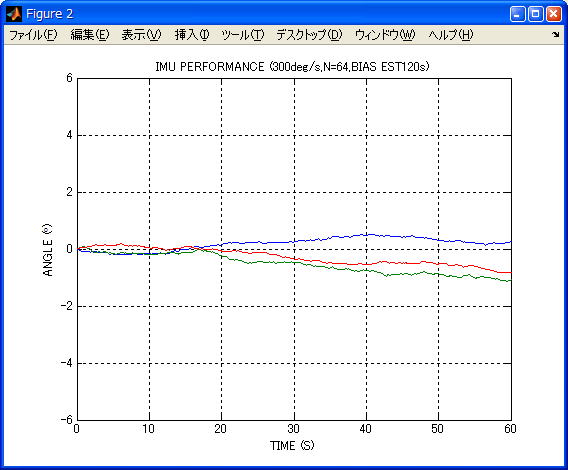
(補足: バイアス推定をどうやっているか、との質問があったので。ここではバイアスは単純に静止状態120sの計測値平均で求めている。実使用ではGPS/IMU統合で一般的にやられるように、カルマンフィルタで位置、速度、姿勢と同時推定する予定。このフィルタ定数を決めるためにも静止特性をちゃんと測っておく必要がある。3/8追記)
S.Schaer, IGSMAIL-5731: PRN32/SVN23 tracking deficiency, 04 Mar 2008
先日GPS PRN32がusableに設定されたが、IGS局のうちPRN32をちゃんと追跡できない受信機のリストが挙げられている。Ashtech
Z18やTrimble NetRSの成績が悪いようだ。これを見るとIGS局は比較的Ashtechが多い様だが、これはどんな理由によるのだろう。
廉価1周波RTK-GPS評価用にL1 GPS受信機モジュールGarmin GPS 15L (マース15 DC5V) (中) を購入。アンテナ付で\15,540也。生観測値やephemeris出力に対応しているが、当然ケーブルやプログラムは自作しないといけない。左はNovAtel SuperStart II。とりあえずMCX-SMA変換ケーブルを作った。やっとSMAコネクタの圧着にも慣れてきた。

.....................................................................................................................................
ION GNSSのアブスト〆切が近づいてきたのでION GNSS 2007のCD-ROMを漁る。なんか面白そうな研究が沢山あるなあと改めて思った。Y君、研究テーマを見直すならIONのproceedingsをできるだけ沢山見た方がよい。多分面白いテーマはいくらでも見つかると思う。
.....................................................................................................................................
P.D.Groves, Principles of GNSS, Inertial, and Multisensor
Integrated Navigation Systems, Artech House, 2008
Amazonで届いた新刊。GNSSを中心とした複合航法システム、流行の言葉で言えばセンサフュージョン
(もしかすると既に死語?) による航法技術。取り扱っている複合センサは加速度計、ジャイロ等のINSが中心だが、それ以外にもLoran,
ILS, WLAN, UWB, Rader, Sonar, Odometer, Image
Matching, Map Matching 等多岐にわたる。GNSSによる複合測位技術を俯瞰するには良い参考書だと思う。IMUグレード毎の典型的なバイアス誤差の表があったので以下に引用しておく
(Table 4.1)。
| IMU Grade | Accelerometer Bias | Gyro Bias | ||
|---|---|---|---|---|
| mg | ms-2 | deg hr-1 | rad s-1 | |
| Marine | 0.01 | 10-4 | 0.001 | 5x10-9 |
| Aviation | 0.03-0.1 | 3x10-4- 10-3 | 0.01 | 5x10-8 |
| Intermediate | 0.1-1 | 10-3 - 10-2 | 0.1 | 5x10-7 |
| Tactical | 1-10 | 10-2 - 10-1 | 1-100 | 5x10-6 - 5x10-4 |
| Automotive | >10 | >10-1 | >100 | >5x10-4 |
現在のMEMS IMUでは、実特性を見る限り頑張ってもTactical
Gradeまで届かない。Tactical Grade IMU (例えばFOG)
ではすぐ\数100万の価格帯になる訳で、GPS精度に見合うIMUをGPSと同価格クラスで用意するのは現実的ではない。特に加速度計は最高グレード10-4ms-2のバイアスでも1分間の積分で18cmの位置誤差を生じる訳で、RTK-GPS精度には釣り合わない。逆に言えばGPSは
(色々な制約が有るとは言え) 他技術に比較して非常にコストパフォーマンスが良い測位技術であるとは言えると思う。
補足: 本文を読んでいたら「同じMEMS IMUが、未校正のものがAutomotive
Gradeで、校正済みのものがTactical Gradeで売られることがある」との記述があった。でも現行MEMS
IMUでは校正済みでもTactical Gradeとしての利用は厳しい気がする。13:57追記
EPSON DirectのST100をGPSログ専用マシンとして整備。本格的にアンテナや受信機の評価をするためには長期にわたって安定してデータ取得できないといけないので。色々トラブルもあってOSの再インストール等で結局1日つぶれてしまった。

.....................................................................................................................................
.....................................................................................................................................
| Home | by T.Takasu |