|
日記・備考録 |
2007 | 2008/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2009 |
| June | July 2008 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
August | Home |
.....................................................................................................................................
SiGe GN3S Sampler v2
Sparkfunで予約注文していたSiGe社のGPS信号サンプラーが届く。$299.95+$71.88
(shipping) 也。SiGe4120というGPS/Galileo受信機フロントエンド (LNA+ダウンコンバータ+ADC)
LSI内蔵で、USBでPCに接続し、サンプルレート8.1838MHzで最大40秒までの生GPS/Galileo信号データをPCに取り込むことができる。Sparkfunによると"high-end
research device"らしい。取り込んだ生信号データは、K.Borre
et al., A Software-Defined GPS and Galileo Receiver付属のプログラムで解析 (捕捉+追尾+航法計算)
することができる。次の次の研究テーマに向けてソフトGPS受信機の勉強用。あとGalileo
(GIOVE) の信号をキャプチャしてみたかったので。ソフト受信機用専用サンプラーや受信機フロントエンド用LSIは他にも有るし、OEMボードの改造という手も有るのだけど、いずれも高価だったり手間がかかりそうだったりしてちょっと敷居が高い。その点ソフト受信機の動作を簡単に試せそうだったので買ってみた。
Borreの本のDVDに入っているMatlabプログラムをちょっと動かしてみたのだけれど、どうもMatlab本体だけではダメでSignal Processing Toolboxが必要らしくプログラムがエラー終了してしまう。プログラムをかなり書き換えないといけない様で、これは片手間では動きそうもない。少し長期で取り組む必要が有りそうだ。
補足: GN3S Sampler添付APではメモリの制限で40s以内のデータ取り込みと後処理解析しかできない様だが、ドライバやAPのソースプログラムは公開されているので自分で改造すれば、本格的なソフトGPS受信機とすることも出来るだろう。OpenSourceGPS というソフトGPS受信機のプロジェクトもあり、これらで公開されているコードを使えば、それ程大変という訳でもない。と言うことで時間を見つけてボチボチと進めてみたい。(最終的にやりたいのは搬送波追尾レベルのGPS/INS統合、いわゆるDeeply-Coupled GPS/INS Integrationなのだが) (8/1追記)
-------------------
覚書。論文〆切及び発表日一覧。いつの間にか7月も終わり。早いなあ。
| Conference | Paper Deadline | Presentation |
| ION GNSS 2008 | 9/29 | 9/17 |
| IS-GPS/GNSS 2008 | 9/30 | 11/11-14 |
| 第52回宇宙科学連合講演会 | 9/8 | 11/5-7 |
-------------------
IS-GPS/GNSS 2008のアクセプト来た。と言っても実はプログラム委員やってて内情知ってるのでそんなに嬉しくないのだけど。
> Congratulations!
> Your paper ID#727 has been selected
as an oral presentation at
> International Symposium on GPS/GNSS
2008, November 11-14, 2008,
> in Tokyo. Your paper will be published
in the meeting's CD-ROM
> proceedings only if you submit the full
paper and pay the registration fee
> (https://apollon.nta.co.jp/gpsgnss-er/) by the end of September 2008.
> You can update your abstract and full
paper anytime from the online submission
> site (http://www.nta-aps.jp/aps/GPS08/) until the end of September.
>
> The guideline for the oral presentation
will be available at the homepage.
> We are looking forward to seeing you
at GPS/GNSS Symposium in Tokyo.
.....................................................................................................................................
KVH Industries, Inc., An Update on KVH Fiber Optic Gyros and Their
Benefits Relative to Other Gyro Technologies, March 2007
米国KVH社のFOG (Fiber Optic Gyro) の宣伝資料なのだが、MEMS
Gyro, FOG, RLG (Ring Laser Gyro) の性能比較表が載っていたので以下に引用しておく。性能のうちARWはAngle
Random Walkでジャイロのランダム雑音に起因する角度ドリフト。RLGのMTBFが非常に低いのが目を引く。なおKVH社はNovAtel社受信機と統合したCNS-5000というGPS/IMUセンサを最近発表している。
| Gyro Type | Price/Axis | MTBF (hr) |
ARW (deg/hr) |
Bandwidth (Hz) |
Bias Stability (deg/hr) |
Scale Factor (%) |
| MEMS | $1,000 | 100,000 | >0.5 | 50-100 | 10-10,000 | 0.1-1.0 |
| KVH FOGs | $3,900 | 55,000 | 0.0667 | 100-1000 | 1.0 | 0.15 |
| Closed-loop FOGs | $6,500 | 35,000 | 0.5-0.05 | >600 | 1-10 | 0.01-0.1 |
| RLGs | $9,500 | 2,000 | <0.001 | 100-1000 | <0.001 | <0.001 |
ちなみに、今MEMS IMU評価に使っているADI ADIS16354ジャイロのカタログスペックを書いておくと、ARW=4.2deg/sqrt(hr), Bandwidth=350Hz, Bias Stability=54deg/hr, Scale Factor=? である。また、Price/Axisは$100-200である。
.....................................................................................................................................
G.Gibbons, Boeing Wins NRL Contract to Continue Iridium/GPS
Development, Inside GNSS, 2008
Boeing社が米国NRL (Navy's Naval Research
laboratory) によるイリジウム通信衛星を利用した軍用GPS補強システムの研究契約を取ったという話。Boeing社が研究中のこのGPS補強技術は"iGPS"と呼ばれ、通信衛星イリジウムの高出力通信チャネルにより高精度時刻を再送信することにより、TTFF短縮、高妨害電波耐性を狙う。P(Y)コードの
(C/Aコードを経由しない) 直接捕捉も可能になるとしている。将来的にはイリジウムから直接測位信号を放送することも考えられている様だ。もともとは軍用であったが、safety-of-life
userを含めた民生利用も検討中であり"High
integrity"を売りにしているとのこと。
イリジウム自体は66機のLEO衛星群からなる。モトローラ社を中心としたコンソーシアムにより開発・打上げられ1998年にサービス開始したがすぐに破産。その後イリジウム衛星LLC社が買い取って、衛星携帯電話サービスを中心に運用が続けられている。サービスや技術的内容についてはwikipedia-enが詳しい。
軍用目的という感じで少しキナ臭い感じがする訳だが、補強技術として見るとAGPSとどれだけ違うのだろうと思わないことはない。
補足: イリジウム衛星群は2002年までに地球大気に突入させ破壊することが決定されていた
(参照) が、最終的にIridium Satellite LLC社が衛星や地上局等、全資産を買い取って運用を続けることになった。Boeing社はIridium
Satellite LLC社との契約でイリジウム衛星群の運用と保守を担当している
(参照)。イリジウムプロジェクトの進展、挫折と再生についてはこの記事が参考になり、内容的にも面白い。(21:10追記)。
中低軌道衛星コンステレーションによる衛星携帯電話サービス計画にはイリジウムの他に、テレデシック (1300-1400km 288機)、グローバルスター (1400km 48機)、ICO (10390km 10機) 等があったが、現在実質的に運用が続けられているものはイリジウム以外にはない様だ。ただ各社共に衛星打上計画はまだ有るようで完全に死に体という訳でもない。ビジネス的にはかなり厳しそうだが衛星携帯電話以外のアプリケーションが見つかれば復活する可能性はある。通信にしても携帯電話にしても、衛星ベースのシステムが地上局ベースのシステムに勝てる領域はそれ程広いわけでないので、将来的には衛星測位システムも大部分地上局ベースの測位システムに取って代わられる可能性もある。と言っても現状ではまだ地上局ベースの測位システムでまともな精度の出る技術は無い訳で、もう少しこのあたりの研究が進められても良い様な気はする。(21:48追記)
Globalstar社は2002年に倒産したが、その後再建され衛星携帯電話サービスは現在でも継続されている様だ。2006年にはAlcatel
Alenaia Space社との第2世代衛星開発契約を結び
(参照)、2007年には8機の予備衛星打ち上げに成功している。ただ第1世代衛星のS帯アンテナアンプの劣化により2008年までに双方向通信サービスが継続できなくなる問題が懸念されている
(参照)。(7/30追記)
.....................................................................................................................................
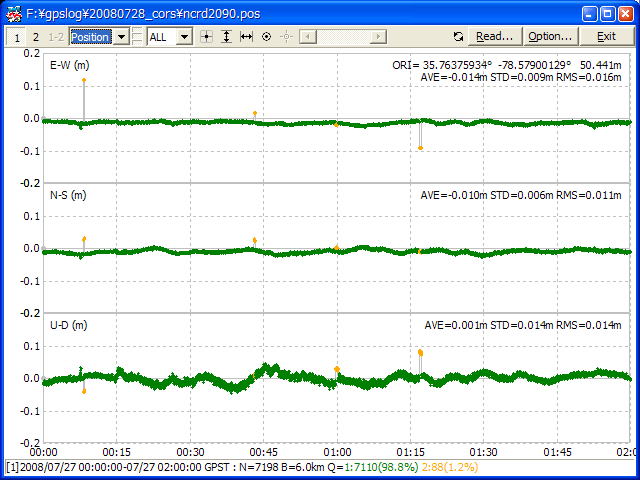
National Geodetic Survey, NGS CORS Using Google Maps
米国NGS (National Geodetic Survey) の運用する基準局網CORS
(Continiously Operating Reference Station)
のサイト地図にGoogle Map版ができていたので貼っておく。青ピンが1Hz局で、30日以内であれば全データを、30日より古いものは30sに間引いた観測データがダウンロードできる。さすがに米国でありイラクにも基準局が設置されているらしい
(例えばバクダッドISBA局の写真)。以前調べたときは高密度1Hz局はオハイオ州付近しかなかった覚えが有るが、東海岸を中心に1Hz局がかなり増えている。試しにノースカロライナ州
NCRD局-RALR局の1Hzデータ2H分をダウンロードしてRTKLIB
v.2.1.0で基線解析してみた。基線長6km。各局座標はNGSが決定したITRF00座標を使いアンテナPCV補正を入れている。この結果を見る限り日本より電離層状態は良さそうである。日本では試験用1Hzデータの入手に苦労するのでその点でも便利である。
.....................................................................................................................................
KNB News, 高精度GPS実験協議会設立, 2005/7/22
IS GPS/GNSS 2008のスポンサーリンクを辿っていたらこんなニュースを見つけてしまった。今まで知らなかったのだけれど安田先生が会長をされているらしい。ちょっと調べてみるとワンセグ放送同期信号の空き領域を使って高精度GPS補正情報を流す方向で検討が進んでいるらしく、FKPを使ったネットワークRTK実験が既に行われているようだ。面白い試みだと思うがワンセグって信号は安定して受かるのだろうか。ワンセグ携帯も持っていないのでこの辺の状況がよく分からない。
-------------------
高須他, 移動体向け広域型ネットワークRTKシステムの検討,
電子情報通信学会 宇宙航行エレクトロニクス研究会
(SANE), 2008
7/25発表の論文に関し、電子情報通信学会の著作権規定により、技術研究報告に関してはWeb頁で公開できないことが分かったのでupしません。論文のコピーが必要な方は著者まで直接ご請求下さい。(アブストはSANEプログラム参照)
.....................................................................................................................................
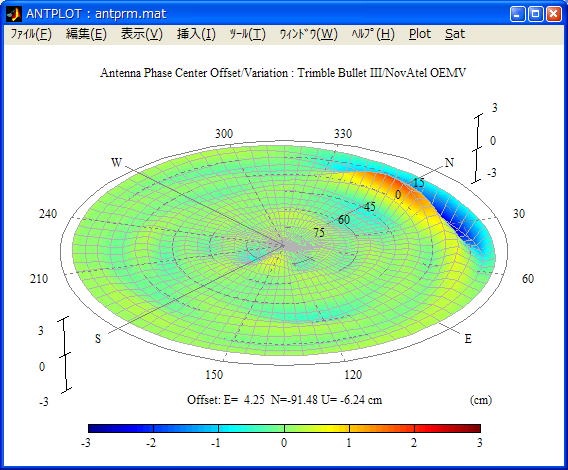
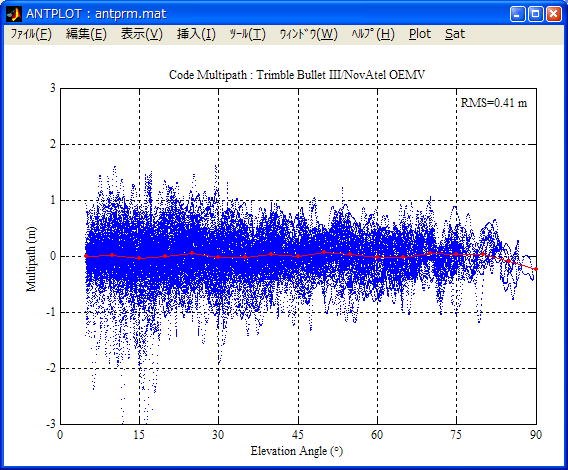
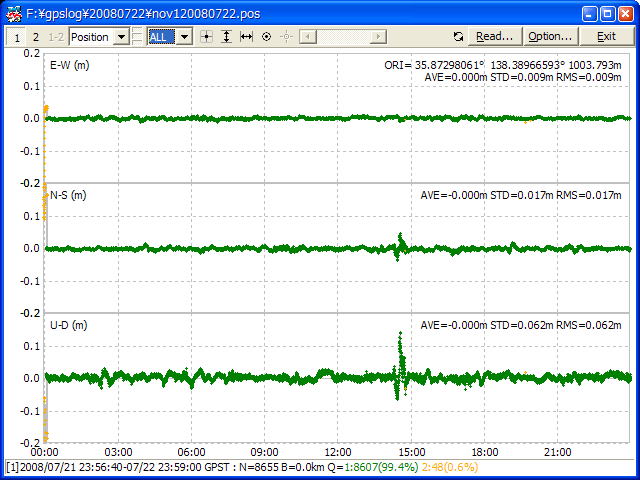
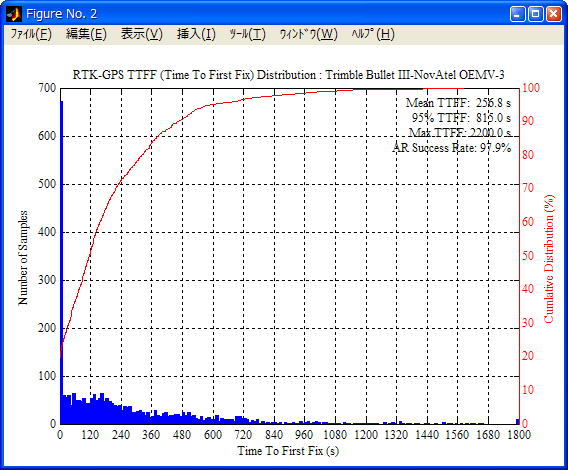
GPS L1アンテナ・受信機評価
Trimble Bullet IIIの結果を追加した。
高須他, 移動体向け広域型ネットワークRTKシステムの検討, 電子情報通信学会 宇宙航行エレクトロニクス研究会
(SANE), 2008 (発表資料PDF)
今日はこれからあの暑い東京 (三鷹) に出かけなければいけない。少し気合いが必要。
.....................................................................................................................................
Trimble Bullet III は$100前後のL1アンテナとしては優秀なアンテナである。PCV (左上) はフラットだし、コードマルチパス(右上) も十分押さえられている。低仰角受信レベルが高く、スリップ発生率も低い。コストパフォーマンスが高くお勧め。(受信機: NovAtel OEMV-3, 解析S/W: ANTTOOL v.1.1)
補足: RTK-GPS精度 1m基線 (左下)、TTFF (右下) 追加。GPS-702-GGまでは行かないが今まで評価したL1廉価アンテナでは最も性能がよい。(15:22追記)
.....................................................................................................................................
随分前に注文していたTrimbleのBullet IIIアンテナが届いたので、屋根の上に上げる。1"-12スレッドでかつケーブルをポールの中に通すタイプなので、材木を削ってマウントを作り両面テープで固定。グランドプレーンはなしにした。デジカメがちょっと見つからないので画像は無し。本体は$125だったが、送料がUPSで$120も取られた。これはちょっとぼり過ぎだろう。
.....................................................................................................................................
ANTTOOL ver.1.1
プログラムのバージョンアップ。簡単に言えば主にJavad受信機対応。
.....................................................................................................................................
RTKLIB v.2.1.0のソースラインカウントを取ってみた (コメント抜き、APソース除く)。geiod.cは大部分機械生成ソースなのでこれを除くと22ファイルで合計6.3K行である。工数は結構くっているのだが、こう見てみるとかなり小規模なライブラリであることが分かる。GPStkに比べても5分の1以下ではないだろうか。
153 convkml.c 89 datum.c 2000 geoid.c 153 lambda.c 557 postpos.c 267 rcvlog.c 471 rinex.c 1127 rtkcmn.c 437 rtklib.h 525 rtkpos.c 761 sbas.c 524 solution.c 270 rcv/crescent.c 20 rcv/crescent.h 137 rcv/garmin.c 19 rcv/garmin.h 303 rcv/novatel.c 19 rcv/novatel.h 276 rcv/ss2.c 20 rcv/ss2.h 180 rcv/ublox.c 22 rcv/ublox.h
補足: 少し古い版だがGPStk-1.2のソースラインカウント (コメント抜き、srcのみ) も取ってみた。268ファイル/合計37.2K行。機能は違うが、C++だということを割り引いてもあまりに冗長だという気はする。(22:51追記)
-------------------
プログラムを人に使ってもらうと、思いもしなかった問題が顕在化するわけで、まあそれだけでもリリースした意味がある。自分で使う分には大体問題はすぐ分かるのでエラーメッセージはいい加減で良いのだけど、一般ユーザにとってみればメッセージが妥当でなければ問題の原因は全然見当つかないので、分かりやすいエラーメッセージをきめ細かく出力してあげる必要がある。
今回RTKLIB v.2.1.0 をリリースした方は多分ここを読んでいると思うので書いておくと、もしRTKPOSTの実行で問題が発生した場合は、問い合わせる前にまずOptions - Output - Output Debug TraceをLevel 4に設定して、再実行して下さい。実行すると出力ファイルと同一ディレクトリに<出力ファイル>.traceの名前のデバッグトレースファイルが生成されるので、そのファイルとできるだけ詳細な状況を書き添えて、問い合わせ下さい。
MSDN, Visual C++ファイルの再配布
RTKLIB v.2.1.0のコンソールAPが「指定されたプログラムは実行できません」と言われて実行できない問題を指摘されたので検索。標準C(89)の機能しか使っていないただのコンソールAPなのになんかもの凄く面倒。やっぱりVisual
Studioをサポートするのはもうやめようか。ということでVisual
C++ 2008をインストールしていない環境でRTKLIB付属コンソールAPのバイナリを実行しようとすると、上記問題が発生するかも知れません。その場合は恐れ入りますが自分でソースをコンパイルして利用下さい。次の版ではできるだけどんな環境でもちゃんと動くコンソールAPを添付します。
しかし最近のWindowsではupdateを当てたりAPや開発環境を入れたりするといろんな.dllが勝手にインストールされたり更新されたりする訳で、バイナリAPの配布にはそれら.dllの依存性を考慮してどんな環境でも動くよう確認試験が必要になる。といっても現実に全ての環境での試験は不可能な訳で互換性問題は数多く発生するだろう。パッケージソフトの開発者はそういうくだらないサポートを延々と続けなければいけない訳で大変だろうなあ、とは思う。
互換性問題を起こさない様にするのにはプログラムの実行コンテキストを小さく保つ、すなわち外部ライブラリをなるべく使わないで自前ライブラリだけ使うようにする必要がある。ちょっとでも外部ライブラリを使うと普通そのライブラリ中から孫引き、曾孫引きで外部ライブラリを使っているから互換性問題を回避できない。といってもGUI等、複雑な機能は既存ライブラリを使わざるを得ないから人海戦術で試験、試験、を積み重ねて確認するしかない。でもこれも外部ライブラリが更新されてしまえば原則再試験が必要になる訳で、結局現実的にはある程度の所で妥協して、サポートコストを見積もった上で、利用者からのフィードバックでバージョンアップを重ねていくという保守モデルを取らざるを得ない。でもこれって実は利用者は金を払った上でバグを見つけるために貴重な時間を割いている訳でかなり利用者をバカにした保守モデルではある。などと考えると今のWindowsの様な環境上での汎用パッケージソフト販売というのはビジネスモデル的に既に破綻をきたしているのかもしれない。といっても前から言われているオープンソース+有償サポートビジネスというのがうまく機能しているケースは実際には少ないし、いったいソフトウェア開発ビジネスというのは何処に向かっているのだろう。
.....................................................................................................................................
東京は暑いなあ。夏、東京に3日もいるともうグッタリ。特に今回は夜ホテルでデバッグしていて、あんまり寝てないので疲れた。でも、大泉に帰ってきたのにあんまり涼しい感じがしない。
RTKLIB v.2.1.0完。この版はとりあえず大学内や関係者のインハウス公開に止めることにした。多分v.2.1.1を一般公開することになる。いるかどうか知らないが、待っている方がいらっしゃるならもう少しお待ちを。
.....................................................................................................................................
RTKLIB v.2.1の試験、試験、...。品質は上がっているのだけど、機能や性能は結局1年前とあんまり変わっていない訳で今更何をやっているのだろうと思わないことはない。
.....................................................................................................................................
L.Wanninger, Innovation: The Future is Now, GPS + GLONASS
+ SBAS = GNSS, GPS World, 2008
GPSと比較したGLONASS, SBAS (EGNOS) の性能評価。評価内容としては軌道・時計、コード測位、搬送波測位
(RTK)。SBAS軌道・時計の評価結果はないが "経験上WAAS,
GAGAN, MSASは十分良いが、EGNOSは非常に低品質"
としている。でもこれ本当? WAASやGAGANは良く分からないが、少なくともMSASのレンジング信号を含めることで測位精度が改善されたということは経験したことがない。RTKでのMSAS評価はちょっとやったが結果は芳しくなかった。これは軌道があんまり良くないのではないかと推測している。軌道と時計を分離するのは難しいのだが電離層を落とせばUREでの軌道+時計精度評価はできるので誰かちゃんとやってくれないだろうか。SBAS
(EGNOS) のコードマルチパスがGPSやGLONASSに比較し極端に悪い。これは衛星
(Inmarsat-3) の送信帯域幅 (2.2MHz) が狭いせいで受信時にワイドコリレータを使っているからとのこと。MSASの場合送信帯域幅はどうなっているのだろう。多GNSS時代に向けて、なかなか示唆的で面白い解析結果が満載である。
補足: ちょっと疑問に思ったのだがInmarsatの様な汎用通信衛星でWAASやEGNOSのレンジング信号はどうやって送信しているのだろう。MTSATの様に専用衛星ならともかくInmarsatに専用の信号生成装置が載っているとは思えないのだが。レンジング信号の送信には精密な時刻同期が必要な訳で、地上で信号を作ったのでは多分精度が出ないと思うのだが。これはSBASの仕組みをちょっと調べてみないといけない。(11:00追記)
昨年GPSシンポで国土交通省航空局 真鍋氏が書かれたMSASの解説を読んだ。MSASのレンジング信号は地上からアップリングした信号を周波数変換して折り返すだけのベントパイプ方式とのこと。多分WAASもEGNOSも同じ方式なのだろう。衛星には周波数が合致したトラポンだけ有れば良いので一般の商用通信衛星が使えることになる。「このため伝送遅延などを考慮しながらMTSATの送信アンテナを出るタイミングがGPS時刻に同期するように地上から送り出す信号のタイミングをコントロールしている」とある。なかなか凄いことをしている様だ。地上で信号を作れば高精度時計の問題は解決容易だが、アップリンクの大気圏遅延補正もしなければいけないし (MTSATのアップリングはKu帯を使っているので電離層の影響はGPSの1/100以下だが)、トラポンの遅延時間をどうやって校正しているのかとか、遅延時間が本当に安定なのかとか、専用衛星でないと軌道決定精度が出にくそうに思えるがどうやって軌道決定しているのだろうとか (軌道決定精度が最終精度に2倍効くことになる)、軌道制御の際はどうやって運用するのだろうとか (多分信号を止めるのだろう)、かえって疑問が増えてしまった。まあ測位衛星システムもGPS方式だけでなく、考えれば色々な方式が考えられる訳で、要素技術が変われば原子時計を積まない測位衛星だって十分可能だろう。(15:00追記)
最近、次期気象衛星予算が集まらないでピンチというニュースがあったが、MTSATから撤退する航空局はどうするのだろう。ベントパイプ方式で有れば専用衛星である必然性は全然無いので次期MSASはInmarsatを借りることになるのだろうか。(15:26追記)
-------------------
RTKLIB ver.2.1 公開に向けソース改修。と言っても、汚いコードを綺麗にしたり、性能ネックを改善したり、デバッグトレースをちゃんと入れたり、GUIプログラムのアイコンを作ったり、Experimentalな機能を削除したり、操作性や視認性の悪い部分を直したり、と言ったいわゆるリファクタリング。この手の作業で一時的に品質が落ちるので、外部仕様が安定したら、次にunit
testを追加して、テストケースを整備して、テスト、テスト...の予定。文書整備もしなければいけない。ホントに来週までに終わるのだろうか。
IONの準備やGT0.6.4は来週が終わってからだなあ。
第52回宇宙科学技術連合講演会, 淡路夢舞台国際会議場, 2008/11/5-7
忘れないように貼っておく。申込み〆切7/17。
.....................................................................................................................................
IERS Bulletin C 36, UTC TIME STEP on the 1st of January 2009, 4 July 2008
3年ぶりのうるう秒通知がIERSから出ている。2008/12/31
23:59:59と2009/1/1 0:00:00との間に、2008/12/31
23:59:60が挿入される。2009/1/1~ UTC-TAI=-34s,
UTC-GPST=-15s。現在審議中のうるう秒停止が決定されても2013年からの適用になる様で、これが最後のうるう秒になるかどうかは微妙なところである。うるう秒に対しGPS受信機がどういう動作をするのか興味があるので、来年元旦の朝はちょっと各GPS受信機の挙動を調べてみたい。
.....................................................................................................................................
昨日書いたSANE用論文に"Wide Area Network RTK"というTechnical Termを使った訳だが、この言葉は造語である。多分使われていないはずと思って、Google検索: 5件。そのうち1件はSANEのプログラムである。実はWADGPSの"Wide Area"より随分と対象エリアは狭いわけで、最初は"Regional Area"にしようとしたのだけど、これではちょっと狭い感じがして最終的にまあいいやと思って"Wide Area"とした。今考えると"Nation Wide"とか"Satellite-based"の方が良かったかも。言葉の使い方というのは難しいなあ、と文章を書くたびにいつも思う。
.....................................................................................................................................
電子情報通信学会SANE原稿完。原稿は7/25の発表以降にupの予定。
〆切9:00で、投稿が8:55。8:40を過ぎてWordがスペルチェック途中で落ちたのには焦った。皆さんスペルチェック前には必ず保存をしましょう。
-------------------
ESA, Galileo Full Operational Capability (FOC)
Procurement Tender Information Package
7/1にGalileoの公開調達が開始された様でTender
Informaitonが公開されている。今回の調達対象はSystem
Support, GMS (Ground Mission Segment), GCS
(Ground Control Segment), Space Segment (Satellite),
Launch Service, Operationである。Tender Infoに含まれるマスタスケジュールによればIOV (In Orbit Verification) が2010年末、FOC
(Full Operational Capability) が2013年末。IOVでは4衛星+1制御局+1追跡管制局+5アップリンク局+18-20センサ局、FOCでは30衛星+3制御局+5追跡管制局+9アップリンク局+30-40センサ局、の構成となっている。計画通りに進めば、5年半後にはL1帯で使える測位衛星数が倍増する訳だが、はたして順調に行くであろうか。
.....................................................................................................................................
International Symposium on GPS/GNSS 2008, Odaiba Tokyo Japan, Nov 11-14, 2008
GPS/GNSS国際シンポジウム2008の最終発表登録リストがupされている。250件近い応募が有った様で、タイトルだけ見ても面白そうなテーマが並んでいる。
是非、沢山の方がシンポジウムにご参加下さいます様、よろしくお願い致します。
.....................................................................................................................................
VAIO TZ90S Vista → XPダウングレード覚書。
(1) ドライバ: ftp://ftp.vaio-link.com/PUB/OS/XPDOWNGRADE/TZ1-TZ2/DRIVERS.ZIP
(2) Felicaサポート: http://www.sony.co.jp/Products/felica/pcrw/fsc_dl.html
(3) ユーティリティ: ftp://ftp.vaio-link.com/PUB/OS/XPDOWNGRADE/TZ1-TZ2/TZ2_XP_APPLICATIONS.ZIP
なんてことはない。正式サポート品ではないがドライバ及び主なユーティリティ1式は以上URLで手にはいるので、Vistaリカバリディスクを作ってから、XPをクリーンインストールし、(1) 及び (2) のドライバを順次インストールすればよい。ただし (1) のCamera Driverはシャットダウンに不具合が出るので、VistaリカバリディスクのCamera Driverを入れる必要がある。XP用メイリオフォントも入れて大変快適な環境になった。
-------------------
電子情報通信学会SANE論文作成。あとRTKLIB公開準備のためバグつぶしと操作性改善。
.....................................................................................................................................
| Home | by T.Takasu |