
青: GPS, 茶: GLONASS, 緑: 新GLONASS, 灰: GPS/Galileo, 黒: Galileo (出典: Inside GNSS)
|
日記・備考録 |
2005 | 2006 | 2007 | 2007 | 2008/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2009 |
| March | April 2008 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 |
May | Home |
.....................................................................................................................................
昨日書いたTrimbleの分割フィルタについて補足。
フィルタを分割しても求めるパラメータや観測方程式の数が減るわけではないから、ちょっと考えると全計算量が減りそうにない気がするが実際には計算量は減る。これはフィルタ計算の大部分が行列乗算で占められていてかつこの計算量が概ね行列サイズの3乗に比例するからである。ただ分割フィルタは近似解法であって厳密解法ではないので分割の仕方によっては性能劣化が考えられる。その点Trimbleの手法はよく考えられている。実装の点から考えると、分割フィルタはマルチスレッド化が図りやすいのでマルチコア/CPU計算機を使ってスケーラビリティを確保しやすい、とのメリットもあるだろう。ただプログラム構造は複雑化せざるを得ないので、その実装は簡単ではない。
個人的には、衛星軌道・時計はIGS、対流圏は気象庁、基準局観測値は国土地理院がそれぞれNTRIPを使ってインターネット放送し、利用者はそれらを取得し自分で補正を行う分散型システムが単純で望ましいと思うが、これは無線通信エリアの問題が残るので、衛星を使った広域型ネットワークRTKの需要も無くならないだろうと思う。
.....................................................................................................................................
下のVollath論文の最後で"FAMCARは米国特許出願中"とあるのでGoogle Patent Searchで検索。多分これだろう。特許手続についてよく分かってないが"Patent Application" なのでまだ特許が成立している訳ではなく審査中の扱いのようだ。
US Pat. App 10/696,528, Ambiguity estimation of GNSS signals for three or more carriers, Filed Oct 28, 2003
細かい手法はこちらの方がよく分かる。まず推定フィルタを、Geometry
Filter, Ionosphere Filter Bank, Quintessence
Filter Bank, Code Filter Bankに分割しそれら単独でパラメータを推定する。それらFilterの推定結果を統合してから整数最小二乗を使って整数バイアスを解く。整数バイアスは各種テストで検定して最終解とする。なおこれらの分割フィルタは計算量削減のためであるとして、計算量見積もしている。
昨年のGPSシンポ発表で「現実のネットワーク型RTK-GPSにおける基準点間基線整数バイアス決定手法については必ずしも十分な情報が公開されているわけではなく、その内容は不透明な部分が多い」と書いてしまったのだが、Trimble社の手法についてはこの公開特許で概ね十分な情報が得られる。どうも調査が足らなかったようだ。もしかするとGEO++社の手法についても探せば詳細が公開されているのかもしれない。
-------------------
H.Landau et al., Latest Developments in Network RTK Modeling
to Support GNSS Modernization, ION NTM 2007
U.Vollath, The Factorized Multi-Carrier Ambiguity Resolution
(FAMCAR) Approach for Efficient Carrier-Phase
Ambiguity Estimation, ION GNSS 2004
Trimble GPSnet (RTKnet) 関連の重要論文。
上の論文では多数基準局網によるネットワークRTK補正情報作成のための計算量削減の手法について述べている
(GPS World のこの記事とほぼ同じ)。 計算量のグラフがあり単純なフィルタでは
(37*x)^3 (x:基準局数) の乗算が必要になるとしている。これに従えば300局の基準局データを1s以内に処理するためには(37*300)^3=1,367GFlopsの計算機が必要である。これは現行PC
(C2Q) 換算でも最低100台は必要となるということであまり実用的でない。この計算量削減のため最新GPSnet
(v.2.5) ではFederated Filterと呼ぶ分割計算フィルタを導入したとのことでその性能を評価している。下の論文はTrimble
GPSnetで採用されているFAMCARと呼ぶ分割ネットワークRTK補正情報生成手法。
日本のネットワークRTKでは大体300局前後の電子基準点を使っているはずだが、以上のような計算量の問題があるので地域分割して補正情報を生成しているのではないかと思う。VRSやFKPではこれで問題ないが、広域ネットワークRTKでは原則として一括処理せざるを得ないので計算量削減はやはり大きな技術課題の一つである。
補足: Trimbleの分割フィルタ手法を使ってもGeometry Filterの部分は分割推定できないはずで、基準局300局では計算量が過大でPCでリアルタイム処理するのは厳しいのではないかと思う。23:47追記
-------------------
Inside GNSS, Russia Approves CDMA Signals for GLONASS-K,
Discussing Common Signal Design, April 28, 2008
ロシアの次世代測位衛星GLONASS-K測位信号の多元接続方式が従来のFDMAからCDMAに変更になることがほぼ決定した様だ。これはGPSやGalileoとの相互運用性を考慮したため。変調方式としては、L1帯:
BOC(2,2)、L5帯: BOC(4.4)。ただしL3帯にFDMA信号が残る様だ。最初のGLONASS-Kの打ち上げは2010年に予定されているが、軌道上のGLONASS衛星がGLONASS-Kまたはそれ以降の衛星に置き換わるのは2017-2020年頃になるとしている。
測位衛星の信号割り当ては複雑怪奇となってきて本当に混信・妨害等の問題が起きないのか不安ではある。以下にInside
GNSS記事から各測位衛星の周波数割り当てを貼っておく。あとはCompassやQZSS、それにSBASがこれに加わる。
青: GPS, 茶: GLONASS, 緑: 新GLONASS, 灰: GPS/Galileo, 黒: Galileo (出典: Inside GNSS)
.....................................................................................................................................
良く確認したら、QZSS LEXメッセージ構造に関してはIS-QZSS 1.0版 (Draft) 5.7.2に規定があり、ヘッダ部49bits, RS Code 256bitsを除いて利用者が使えるデータレートは1695bpsであった。4/23の技術検討メモはほぼそのまま有効だがデータ容量の余裕は殆どない様だ。
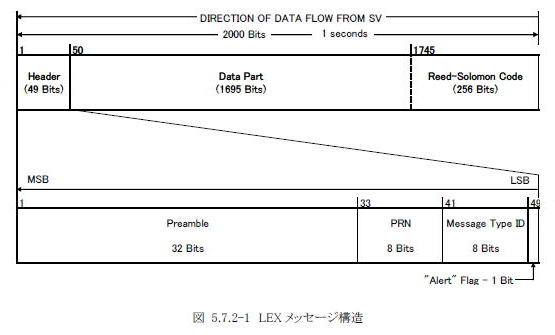
IS-QZSS 1.0版 (Draft) 5.7.2 より
.....................................................................................................................................
J.Kouba, A simplified yaw-attitude model for eclipsing
GPS satellites, GPS Solutions, 2008
GPS Block II/IIA衛星はeclipse (食/日陰) 時に通常とは異なる大きなyaw回転が発生し、ノミナル姿勢を前提としたアンテナ位相中心やphase-windup効果モデルでは最大10cmを越える誤差が発生する。本論文ではIGS解析におけるyaw姿勢モデルの現状と問題点を明らかにし新しいyaw姿勢モデルを提案し評価している。なおIGSにおいて各AC間で整合性のないyaw姿勢モデルにより衛星時計に不具合を生じていたがこれは2008/1に修正されているらしい。
利用者側から見ると以上の問題は特にキネマティックPPPに誤差として現れる。GT0.6.3では食衛星データを除外することにより対応しているが、対策していない解析ソフトでは問題が発生するかもしれない。IGSプロダクトにはこの新しいyaw姿勢モデルが取り込まれる様なので、今後は解析ソフト側でも同一のモデルを導入する方が良いだろう。
K.L.Senior et al., Characterization of periodic variations in
the GPS satellite clocks, GPS Solutions, 2008
GPS衛星時計の特性解析。イントロでIGS軌道・時計の精度評価があってこっちも参考になる。GPS衛星時計の安定度及びIGS時計の補間誤差評価もある。豊富なデータを使ったきちんとした論文だと思うが、補間誤差を評価するならやはり平均時間30s未満の短期衛星時計特性をきちんと解析して欲しかった。
-------------------
Galileo試験衛星2号機 GIOVE-B 2008/4/26 22:16UTC カザフスタンのバイコヌール宇宙基地からソユーズロケットで打上成功。ESA Live Videoを見ていたのだが大変に穏やかな打上だった。

ESA live video streamingから
.....................................................................................................................................
ESA, GIOVE-B launch - live video streaming, 23 April 2008
4/26 22:16UTC (4/27 7:16JST) に予定されているGalileo試験衛星2号機GIOVE-Bの打上ビデオストリーミング中継。Galileo計画予算34億ユーロ
(約\5500億) の執行がEUで正式決定された様だし、この衛星打上もうまく行くと良いのだが。
-------------------
技術検討メモ。
昨日upした技術検討メモは、単純にデータ容量の観点から広域ネットワークRTKの実現可能性を検討したものだった。その前提として基準点網観測値から十分な精度のいわゆるSSR (State Space Representation) 方式の補正情報が生成できることを仮定していた。但しこの仮定が本当に成立し得るかはそれ程自明ではない。ここで少し現状技術を俯瞰して何処に技術リスクや開発要素があるかを整理しておく。
(1) 補正量精度
現行ネットワークRTK程度の性能を確保するためには、広域ネットワークRTK補正量誤差の合計が基準局搬送波位相観測誤差程度であることが要求される、すなわち2-5mm。精度目標を少し緩和したとしても各補正量精度として5mm程度が必要になる。
(2) 衛星軌道・時計補正量
2000km基線で(軌道+時計)補正量誤差を5mm以下にするためには、軌道誤差を概ね5mm×20000
/ 2000=5cm以下にする必要がある。現状技術における軌道推定精度は後処理3cm
(IGS) 、リアルタイム10cm (IGU, RTG) 。ただしこれらでは精密運動モデルとグローバル観測データを使っている。単純モデルとローカル観測データで5cm精度は出ない。従って最低IGUを入力して精密運動モデルを入れモデルパラメータも推定しないとダメだろう。これは内容的にリアルタイム精密軌道決定殆ど変わらないので実装は大変そうである。
(3) 対流圏補正量
現行技術の後処理PPPのZTD精度は3-4mm。準リアルタイムPPPを使って、概ね後処理PPPと同程度の可降水量を推定可能という研究が出始めたので、この技術を使えば精度5mmは達成可能かもしれない。GPS可降水量が数値気象モデルに統合されればそれを使うのが簡単かもしれない。
(4) 搬送波位相バイアス
精度5mmを達成するためには、全基準局網の整数バイアスを解かなければいけない。この際、安定な解を求められるか実用的には99%程度のavailabilityが得られるかは実際よく分からない。整数バイアスを解くこと自体は既存ネットワークRTKでは既に行われているが、この手法は企業ノウハウであり詳細が公開される可能性は低い。従って技術導入できなければ新規開発の必要があり開発要素は大きい。
(5) 計算量の制約
単純には観測方程式のパラメータ数も観測値数も10000を越える
(パラメータ=50(衛星軌道時計)+12×300(電離層)+300(対流圏)+300(受信機時計)+12×300×2(バイアス),
観測データ=12×300×4)。補正量生成のためにはこれらの方程式をリアルタイムで解く必要がある。これらを単純なカルマンフィルタで実装した場合過大な計算量が必要になり実用的でない。従って計算量削減のため計算手法の工夫が必須であろう。Trimble
RTKnetの分割カルマンフィルタ、段階的な解法、整数バイアスの分離解法等、計算量的に実用的な手法を開発する必要がある。
以上ちょっと検討した範囲では一筋縄では行きそうもない。基準局網を数100kmの領域毎に分割出来れば(2), (4), (5)は随分楽になるが、その代わり補正データ量がかなり増えてしまうので、QZSS LEXの2Kbpsに収まらない可能性が高い。従って技術リスクや開発要素、補正データ量や計算量とのトレードオフを検討して、何処まで測位性能を妥協するかという方式設計が重要になる。
.....................................................................................................................................
高須, 広域ネットワークRTK技術検討メモ, 2008/4/23
とりあえず問題なさそうなので公開。QZSS LEXを使って日本全土をサービスエリアとする広域ネットワークRTKを実現可能か、の一次検討メモ。細かい点は色々と見直す必要があるが当初思っていたより実現可能性は高いとの結論。もう少し内容を深めて何処かで発表の予定。研究としての価値があるし可能なら今年度から来年度にかけて少し本格的に実装・評価をしてみたいと思っている。
-------------------
GpsPasSion, GPS Accuracy : Post-Processing and SBAS, 2006
ちょっと古い記事なのだが一般GPS受信機を使ってSBAS
(EGNOS) がどれだけ有効に働くか評価したもの。受信機はiBlue
Nemerix NJ-1030 (SiRFstarIII), Emtact Trine
(SiRFstarII), Globalsat BT338 (SiRFstarIII)。EGNOSを使うと精度が劣化した、とかFIXしなかったとか、評価結果はネガティブなもの。こういう記事を読んで、SBASなんて意味無いじゃん、と早合点する人も多いかもしれない。確かに廉価受信機のSBAS測位に問題は多いようだが、これは主に受信機F/Wの問題に起因するものであってSBASそのものの問題ではない。前にも書いたようにこれらは受信機F/Wのバージョンアップによって改善される可能性が高い。MSASも正式運用開始から半年以上たってそろそろF/W対応が進んでいるはずなので、だれか最新F/Wを使ってちゃんとした評価をしてくれないだろうか。
補足: GPSDGPSさんが最新のi-Blue 747 (MTK) を使ってMSAS評価をしてくれているが、以前の評価と同様にMSASの有効性が認められない、とのこと。うむ...。23:00追記
.....................................................................................................................................
Y.Al Marzooql et al., Establishment & Testing of Dubai Virtual
Reference System (DVRS) National GPS-RTK
Network, GIS Development, 2005
UAE ドバイに構築したネットワークRTKシステムの構成と評価。アンテナ・受信機はLeica,
サーバソフトはGEO++ GNSS-MART。基準局網は5局という小規模なネットワークRTKシステムだが精度評価は参考になる。測位とはあんまり関係ないが、ドバイにはブルジュ・ドバイという高さ世界一の超高層ビルが建築中である。(ブルジュ・ドバイは700m級の様だが中東では1000m級の超超高層ビル計画もある様でなんとなくバベルの塔を思い出してしまう)
.....................................................................................................................................
ION GNSS 2008 Savannah, Georgia, September 16-19, 2008
ION GNSS 2008のプログラムがupされた。Ambiguity
Resolution付PPPというのが幾つか出されており、はやりの課題だとは言えそうだ。
-------------------
技術検討メモ。
以前ちょっと書いた広域ネットワークRTK用補正データをギリギリまで圧縮したとしてどの程度のデータ量になるか検討してみる。前提として、サービスエリアは日本全土とし、補正情報を軌道・時計・電離層・対流圏等に完全に分離できるものとする (いわゆるSSR方式)。また補正衛星数は最大12機とする。
(公開に少し問題があるかもしれないのでとりあえず内容削除。12:52)
.....................................................................................................................................
K.Dixon, StarFire(TM): A Global SBAS for Sub-Decimeter
Precise Point Positioning, ION GNSS 2006
広域ネットワークRTKがらみでStarFireの補正情報内容と更新頻度を知りたかったので検索。StarFireの補正情報はRTG
(Realtime GIPSY) の60s間隔 衛星軌道と1s間隔
衛星時計のみの様だ。それ以外の、電離層は2周波で、対流圏と潮汐はモデルで、マルチパスは受信機F/Wとアンテナで、落としているらしい。衛星軌道・時計の精度評価結果もあるが全衛星RMS誤差の平均で軌道18.5cm
(3D), 時計10.2cm, URE 5.6cm (Radial+Clock)。ネットワークRTKに比較してStarFireは
(今のところ) 整数バイアスがFix出来ないので、測位精度は10分~数10分で水平RMS10cm弱で、これは軌道・時計精度を見れば概ね妥当なところ。ネットワークRTKとの比較で言えば、海上や携帯エリア外でも測位出来る点は大きな優位点であるが、精度・収束時間は対抗できない。
-------------------
水島, 農用車両のための航法センサに関する研究, 北海道大学博士論文, 2003
ネット検索で思いもよらない拾いものの研究論文を発見することがある。本論文もその一つ。農業用ロボットの航法システムの評価。利用しているセンサはGDS
(地磁気方位センサ), FOG, 振動ジャイロ, 傾斜計,
DGPS (StarFire) でありこれらの組み合わせを使ってトラクタの走行実験を行い精度評価を行っている。農業ロボットはPrecision Agricultureと呼ばれる技術の一つであり、上空視界が良く速度もそれ程速くないのでRTK-GPSでも実用的な性能が期待できる。価格さえ下がればRTK-GPSのかなり有望な応用分野の一つである。
.....................................................................................................................................
YouTube, EuroNews - Space - Giove B (英語吹き替え版)
Galileoの紹介ニュース。"GIOVE"は"ジオビ"と発音するようだ。小型搭載型水素メザー原子時計についても紹介しており、衛星時計を完全に同期させることにより30cm以下の精度を達成するとしている。確かに高安定度周波数標準は高精度化において重要な要素の一つだが、現在は補正技術が発達しているので、GPSに比較してGalileoがそれ程技術面の優位性を有しているわけでもない。従って、搭載水素メザーを売りにして高精度を強調するのは少し苦しい説明と言える様に思える。
補足: 英語吹き替え版のリンク追加。4/18
-------------------
Sun, Sun SPOT 無線センサーネットワークデバイス
Javaベースの小型無線組み込みデバイスSun SPOT。ARM9 180MHz, RAM 512K/Flash 4MB, Zigbee, USB, LiIonバッテリ, 3軸加速度センサ, 温度/照度センサ, 外部I/O他、で手の中にすっぽり入るサイズ。OSはなくてJVMのみ。日本ではまだ教育機関向けのみの試験販売しかない様だが、1セット (2デバイス+ベースデバイス+開発ツール) で約\4万は安い。Javaのみというところがちょっと何だが、GPSと組み合わせると面白い応用が考えられるかもしれない。Linuxベースのものが出たら買ってしまうかもしれない。
-------------------
NovAtel, GL1DE(TM) technology
"GL1DE"と書いて"グライド"と読ませるのだろう。NovAtel
OEM-V受信機の最新F/Wでサポートされたスムージング技術。農業機械制御等スムーズな測位解が必要とされる応用に有用、としている。OEM-Vの測位解は少しジャンプが多い傾向があるので、それが改善される様だ。ただ、普通のキャリアスムージングと何処が違うのかよく分からなかった。キャリアスムージングの一つの問題はスリップ発生時の性能劣化だがこれをどう処理しているのかもよく分からなかった。
-------------------
ION GNSS2008 (9/16-19, at Savannah) のアブストがacceptされた。これも少し真面目に進めなければいけない。
A1: GNSS-Inertial Navigation Systems 1
Co-chairs: Dr. Dorota Grejner-Brzezinska,
The Ohio State University and Dr. Yukihiro
Kubo, Ritsumeikan University, Japan
Wednesday Morning, September 17, 8:30 a.m.
- 12:15 p.m.
1. Reduced Inertial Sensor System (RISS)/GPS
Integration using Particle Filtering for
Land Vehicles: J. Georgy, Queen's University,
Canada; U. Iqbal, Royal Military College
of Canada; A. Noureldin, Royal Military College/Queen's
University, Canada
2. On-line Tuning of an Extended Kalman Filter
for INS/GPS Navigation Applications: C. Goodall,
N. El-Sheimy, The University of Calgary,
Canada
3. Accelerometer Compensated Differential
Wheel Pulse Based Dead Reckoning: J.L. Wilson,
M.J. Slade, STMicroelectronics
4. Development of an LSSA-Based INS/GPS System
Amplitude-Phase Resonse Model for Bridging
GPS Outage: M. El-Diasty, S. Pagiatakis,
York University, Canda
5. Cycle Slip Detection and Fixing by MEMS IMU/GPS
Integration for Mobile Environment RTK-GPS:
T. Takasu, A. Yasuda, Tokyo University of
Marine Science and Technology, Japan
6. A Low-Cost Gyro-Free INS/GPS System for
Land Vehicle and Pedestrian Applications:
Y. Gao, M. Yanni, A. Gavriline, Destinator
Technologies Inc., Canada
7. Novel Positioning Algorithms for RFID
Assisted 2D MEMS INS System: M. Zhu, RMIT
University, Australia
8. Tight-integration of MEMs Dead-Reckoning
and GPS: R. Zanutta, F. van Diggelen, Global
Locate, Inc.
Alternates
1. Flight Testing and Data Evaluation of
MEMS INS/GPS Hybridisation Filters - First
Results: M. Steen, P.M. Schachtebeck, R.
Plate, P. Hecker, S. Monrocq, Institute of
Flight Guidance, TU-BS, Germany
2. Field Test Performance of a RTK-GPS/Low
Cost IMU Hybrid Software for Construction
Machine: M. Tanikawara, T. Aoki, Y. Shimogaki,
Hitachi Ltd., Japan; S. Sugimoto, Y. Kubo,
Ritsumeikan University; K. Fujimoto, National
Institute for Land and Infrastructure Management,
Japan
3. Performance Improvement of Integrated
MEMS/GNSS Systems: J-R. De Boer, V. Calmettes,
J-Y. Tourneret, Universite de Toulouse, France;
B. Lesot, Thales Avionics, France
4. Error Analysis for a Miniature MEMS/GPS
Tracking System for Different Types of Movement:
H.T. Luinge, P. Makoto Slycke, Xsens Technologies
B.V., The Netherlands
5. An Emulation Method for Comparing Performance
of MEMS Inertial Sensors in an Integrated
GPS/INS device: M. Chowdhary, SiRF Technology;
M. Sharma, Indian Institute of Technology,
India
.....................................................................................................................................
国土技術政策総合研究所資料 No.343. ハイブリッド型位置特定に関する技術資料, 2006
ハイブリッド測位に関して検索していて見つけた報告書。恥ずかしながら国総研という研究所があること自体今まで知らなかった。主にITS応用を目的として道路における位置特定機器・基盤を調査・検討し有効な組み合わせを提案している。またそれらに基づいてハイブリッド型高精度位置特定シミュレータを実装して自動車に搭載し、位置特定実験を行ってそれらの有効性を確かめている。使用している位置特定機器・技術としては、GPS,
DGPS, RTK-GPS, 自律航法, レーンマーカ, RFIDタグ,
CCDカメラ, マップマッチングである。別添に実験システムの設計書や実験結果が含まれているが全部で3000頁以上もある膨大な資料となっている。GPS+複合センサの統合測位技術を実評価したという点で参考になる点も多い。
.....................................................................................................................................
デジカメWatch, IDFでフォーカス範囲・位置を後からコントロールできるソフトウェア技術が披露, 2008/4/4
最近面白いと思った技術ニュースの一つ。直接は写真のピントを後処理で自由に操作できるカメラ及び画像処理技術。開発したrefocus
imaging社のwebサイトからたどれる記事によると、普通のカメラのレンズと撮像素子間にマイクロレンズアレイを挿入することにより、レンズに入射した光線を分解し、最終的に計算機による画像再構成により撮像画像を生成する。元々は米国スタンフォード大で開発された技術で
"light field camera" または "plenoptic
camera" と呼ばれる。より詳細な原理はこのレポート参照。
興味深いのは撮像データに被写体との距離情報が自動的に埋め込まれる点で、将来的には画像を使った測位技術に応用されるかもしれない。
.....................................................................................................................................
土屋他, GNSS測量の基礎, 日本測量協会, 2008
2002年に発行された同一著者による「新・GPS測量の基礎」の改訂版。Amazonで品切れ中なので測量協会に直接注文した。旧版に比較してGPS近代化、他のGNSSの紹介や、PPP、ソフト受信機、A-GPSと言った比較的新しい測位技術について増補されている。ただ、ざっと見た限り精密測量応用にとって中心技術となる干渉測位やネットワークRTKについては殆ど旧版のままという印象を受けた。前版もそうだったが、厳密な観測方程式や測位理論より、一般GPS利用者にとって分かりやすい浅く広い技術紹介を優先しているので、本書を基にして測位計算プログラムを書こうとは考えない方がよいだろう。
日本地球惑星科学連合2008年大会, D106 測地学/測地学一般
プログラムがupされた。NICTホビガーさん、市川さんの発表に私の名前が入っているのは、GT0.6.3の提供を含めちょっとだけ協力させて頂いたので。私自身の発表はまだ殆ど白紙状態。これは何とかしなければ。
.....................................................................................................................................
Inside GNSS, Jules Vern Automatic Transfer Vehicle Guided
to ISS by Thales Alenia GPS System, 4 April 2008
ESAの宇宙補給機ATV(Automated Transfer Vehicle)「ジュール・ベルヌ」が4/3にISS(国際宇宙ステーション)にドッキングしたが、その航法システムにThales Aleinia Space Italia (TASI) 社製のGPS受信機が使われているとのこと。今回はISSへの接近までで、ドッキングにGPSは使っていないようだが将来的にはRTK-GPSを使って自動ドッキングまで可能になるかもしれない。近年打ち上げられる衛星の多くにはGPS受信機が搭載されていて、宇宙はGPS/GNSSの大きな応用分野の一つになりつつある。TAS社を良く知らなかったのだがwikipediaによると前身はAlcatel SpaceとAlenia Spazio社で欧州最大の衛星メーカとのこと。
補足: ESA発表によるとISS-ATVのドッキングには、まずISSとATV両者の相対GPSにより位置を自動計算し、近接時にはレーザ距離計で距離・姿勢を決定したらしい。そしてこれはESAにとって厳しい安全性制約下での最初の自動ドッキングであった、としている。
.....................................................................................................................................
F.N.Teferle et al., An assessment of Bernese GPS software precise
point positioning using IGS final products
for global site velocities, GPS Solutions, 2007
Bernese 5.0 PPPの精度評価。ちょっと別の論文を検索していて見つけた。無料で読める。Bernese 5.0とIGS Finalを使って5年分のIGS基準座標局位置を1日毎スタティックPPPで求めて、Helmert変換でITRF2000にfittingしてから、JPL,
SIO解と比較している。標準偏差でE:4-5mm, N:7-8mm,
U:12-17mmといったところ。2000年からのデータなのでPPPとしては普通の性能という感じ。でも内容は既製S/Wの精度評価だけで、これで学術論文になるのか、とは思った。
補足: Helmert変換scale係数を見るとGT PPP解程ではないがやはり(北半球の)夏に小さくなる季節変動が見える。これは何に起因するのだろうか?
ひとつの可能性としてアンテナ架台(や設置構造物)の熱膨張が考えられる。基準局は北半球に多いので全体としてみると(北半球の)夏に上側にオフセットが生じているのかもしれない。それにしてはdzには顕著な季節変動が見えないのは少し納得が行かない。その他マッピング関数のオフセット等も考えられる。
.....................................................................................................................................
u-blox, LEA-5T
u-blox社から高精度時刻をサポートした新受信機モジュールLEA-5Tが発表されたが、予想に反してraw
data出力はサポートされない様だ。なおGalileoにもまだ未対応である。ということでF/W
v.3.00版のLEA-5Hを大事にしなければいけない。
Youtube, Penguins - BBC
測位には全然関係ないのだが、ペンギンって実は空を飛べるらしい...。
.....................................................................................................................................
GPS World, Innovation
GPS World誌のInnovationというレギュラーコラム
(というか技術解説) が面白い。基本的に最新のGPS関連技術論文から選定してその内容を紹介しているのだが、取り扱っている技術が非常に広範囲、革新的で、その選定も絶妙である。例えば最近記事を見てみると、長基線RTK、GPSTEC擾乱による津波検知、WAASの拡張、MEMS原子時計、GPS反射波によるリモートセンシング、ニュラールネットワークによるGPSデータ処理、AM放送波測位、といったテーマを取り上げている。研究者にとっては新しい研究ネタを、一般の人にとっても最新技術動向や新応用の可能性を、提供してくれるという面でも、好コラムである様に思う。(2001年7月以降の記事は全て無料で読むことが出来る)
.....................................................................................................................................
| Home | by T.Takasu |