

左: ION会場のSavannah Convention Center、右: ホテル近くのフェリー乗り場と注意書き。
|
日記・備考録 |
2007 | 2008/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2009 |
| August | September 2008 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 |
October | Home |
.....................................................................................................................................
T.Takasu et al., Cycle Slip Detection and Fixing by MEMS-IMU/GPS
Integration for Mobile Environment RTK-GPS, ION GNSS 2008
ION GNSS 2008 paper up。内容はたいして新しいことはない。Tightly
coupled INS/GPS integrationを衛星間1重差でやっているのは少し珍しいかも。一般的な手法では受信機クロック飛びの対応が面倒なので。
とりあえずpdfをe-mailで送って、後からコピー2部をEMSで発送。EMSを初めて使ったが米国まで\1,200だった。3-4日かかるようで、Fedexの方が早いかもしれないが田舎で近くに営業所無いので。IS-GPS/GNSS
2008 paperはまだ。明日の朝までにはなんとかなるか。
Wired Vision, GPSシステムに脆弱性: 偽のGPS信号で受信機をだます, 2008/9/30
あんまり大した記事ではないのだけど。なお、"なりすまし"は原文では"Spoofing"。こういうのがあるからsafty-criticalな応用にはGPSの軍用コードやGalileo
PRSみたいな暗号化コードが必要になるわけで仕様公開された民生用コードを使う限り避けられないのは当たり前。RFを使う技術全般に付随する脆弱性である。これは電波法等の他の方法で取り締まるしかない。"ブリーフケースほどの大きさのGPS受信機を使って"、とあるのだけどこれは受信機に送信回路を付加したということなのだろうか。普通のGPS受信機では簡単な改造でRF送信は難しいと思うのだが。
.....................................................................................................................................
ION 2008 Paperやっと完。でも予定より半日は遅れている。あとはIS-GPS/GNSS 2008 Paper。さて本当に2日で終わるのだろうか。(23:59)
.....................................................................................................................................
Space Flight Now, Russia launces three more navigation satellites, September 25, 2008
2008/09/25 08:49 UTC、3機のGLONASS-M衛星、カザフスタンのバイコヌール宇宙基地からプロトンロケットで打ち上げ成功。現在軌道上のGLONASS衛星は16機だが、内1機は保守中、1機はdecommission中で14機が運用中。従って今回打ち上げられた3機を含めて有効な衛星は17
(or 18) 機となる。今後2011年までに予備も入れて30機のFOC構成とする計画。次回衛星打ち上げは12月に予定されている。
.....................................................................................................................................
某案件完。次はION Paper。なんか時差ボケが残ってるのと〆切が続くので、昼夜反転生活パターンになってきた。でも少し寝よう。(3:55)
.....................................................................................................................................
Inside GNSS, U.S. Confirms Plans for GPS Semi-Codeless
Transition, Sep 23, 2008
GPS L1P(Y)+L2P(Y) の信号仕様を最低2020年末までは維持する、と米国政府が公式表明した様だ。また最低24機のGPS衛星からL2C及びL5民生信号が放送されるようになるのはそれぞれ2016年、2018年になるとしている。今後、今年始めに受け付けたパブリックコメントをレビューし最終表明とする。
ということで、現行の2周波精密測位用受信機はあと最低12年は使えるということになる。12年後には殆どの受信機はL2C/L5対応のものに置き換わっているはずなので、それから信号を止めるつもりなのだろう。でも12年後の状況というのは想像し難いものがある。GPS衛星自体が既に無くなっている可能性が全くないという訳でもない。
.....................................................................................................................................
第110回日本測地学会講演会, 2008/10/22-24, 函館市民会館小ホール
秋の測地学会講演会プログラムがupされている。同時に行われるセッションが1本だけのこじんまりした講演会だがちょっと興味有る発表があるので参加しようかどうか迷っている。
GEOIDE 2008 Precise Point Positioning (PPP)
Workshop, Niagara Falls, Ontario, Canada, 27 May
2008
今年5月にカナダGEOIDE (GEOmatics for Informed
DEcisions) が開催したPPPに関するワークショップ。これは教えてもらった。やはりここでもPPPにおけるAR
(Ambiguity Resolution) がホットなトピックとなっている。PPP-ARには衛星初期位相
(バイアス) の推定と提供が必要なのだが、例えばこの値がcmレベルで時間安定かどうか自体まだ明らかに分かっている訳ではない。従って、今後多数の研究がなされたとしても、実用的な手法と言えるようになるのはまだ5年くらいかかるのではないかと思う。
.....................................................................................................................................
今回IONに初めて参加して (とりあえず自分の発表は棚に置いて) 世界のレベルも大したことはないなあ、という印象と、でも研究者の人材の厚みはやはり圧倒的だなあという印象と、両方持った。ただ自分のやっていることの位置付けを相対的、客観的に見る上では大変参考になった。できれば来年も参加できたらと思う。
-------------------
ION (実質) 3日目。Y君のAlternateだった発表が結局回ってきた。現地で何度も練習したお陰かなんとか無事終わる。ご苦労様。午後は悔しい発表有り。簡単に言えば密かに狙っていた所を先を越されてしまった訳だが、今後追いつき追い越せるだろうか。
.....................................................................................................................................
ION (実質) 2日目。朝寝過して起きたら11:00だった。午前中はあきらめて午後だけ面白そうなセッションを覗く。思ったよりPPPやってる人が多いのはちょっと驚き。でも、それにしてはIGS 30sクロックの品質問題に触れている人はほとんどいない。皆満足しているのだろうか。
.....................................................................................................................................
いくつかIONの発表を聞いた範囲ではAR付きPPPには色々な人が注目している様で面白い結果が出始めている。2年前にはPPPでまともに整数バイアスを解けるとは誰も思っていなかった訳で、ここ2-3年でもっと色々な研究が出てくるだろうと思う。
-------------------
とりあえず終わったのだけれど内容は恥ずかしい。次の機会はもう少しまともな結果を出せるよう精進したい。今みたいにアイデア一発でつまみ食いするようなやり方は真面目にコツコツと研究している他の研究者に失礼だろう、とは思った。
.....................................................................................................................................
Savannah着。落ち着いた雰囲気の町並みで風光明媚な観光都市である。ホテル前は川。川の向こう岸にIONの開催されるコンベンションセンタがあり毎朝フェリーに乗らなければいけない。今日は午前CGSICに参加し午後からIONの展示を覘く予定。
左: ION会場のSavannah Convention Center、右:
ホテル近くのフェリー乗り場と注意書き。
結局Exhibitionは準備中で全然見れなかったので18:30からのPlenary sessionは出ないで、ホテルに帰って手書きで発表原稿作成。発表は原則この原稿を読む。いまさら原稿書いているようで良いのだろうかと思わなくもない。
.....................................................................................................................................
T.Takasu et al, Cycle Slip Detection and Fixing by MEMS-IMU/GPS
Integration for Mobile Environment RTK-GPS, ION GNSS 2008 (PDF)
バックアップを兼ねて水曜のION発表資料をup。現地で当日までに変えるかもしれないが、最悪ノートPCが壊れて、USBメモリを無くして、資料も忘れたとしてもインターネット経由でこのPDFをダウンロードして発表できる。内容は当初思っていた方向とは全然違ってしまったが、時間切れなので仕方ない。久しぶりの海外なので色々と勝手が分からず。でもなんとかなるかな。
.....................................................................................................................................
US Patent 5847680, GPS receiver having fast resolution of carrier
phase ambiguity, Dec 8, 1998
バッファした過去航法メッセージとのビット比較で、次のpreambleの到着を待たずに高速にhalf-cycle
ambiguityを解く手法。Trimble社の特許が成立している様だ。NovAtel受信機の観測データでは次サブフレーム先頭までparity
unknownフラグが残るので単にpreambleを見ているだけで、この手法は使われていないと思われる。移動体ではhalf-cycle
ambiguity resolutionの性能がphase観測値のavailabilityに大きく効くのでTrimble受信機が有利になるかもしれない。今後Trimble受信機の挙動を少し調べてみたい。
補足: この件については昨年8/24にメモを書いている。実はION発表にも関係する。(10:43追記)
.....................................................................................................................................
ION発表資料やっと一息。満足行かないが時間切れなのでもういいや。
IONから帰っても、9月末まで某案件、ION paper、GPS/GNSSシンポpaper、と〆切が続く。でもとりあえずION発表は初日
(水曜) 午前なのでよかった。発表さえ終われば現地で少しはゆっくりできる。
.....................................................................................................................................
11月の宇科連原稿完。
次は来週のION向け続きだがまだGPS/INS複合航法プログラムが思った様な結果にならずちょっと焦っている。
.....................................................................................................................................
O.L.Colombo et al., Intertial-Aided Cycle-Slip Detection/Correction
for Precise, Long-Baseline Kinematic GPS, ION GPS 1999
殆ど泥縄だがColomboがION1999でINS Aidedなサイクルスリップ検出/修正の発表をしているのを見つけたので貼っておく。内容はあんまりよく分からない所が多い。
.....................................................................................................................................
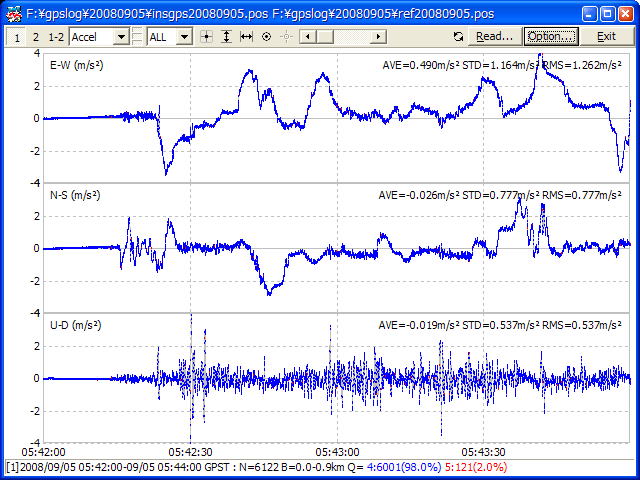
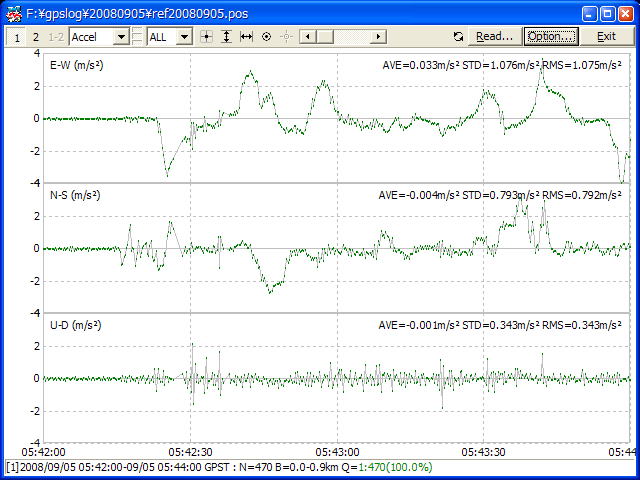
またデータを取ってきた。IMU加速度計測値 (左)、KGPSによる加速度 (右)。8/30とはノイズが大きく違うが、これはIMU内蔵フィルタを最も強い設定 (N=64) (データシートFig.30 参照) にしたため。0-1m/s2程度のバイアスは残っているが、これくらいなら使えるかもしれない。原理的にINS/GPS複合航法でGPS速度をフィードバックして加速度計バイアスを推定出来るはずだが、パラメータが悪いのかプログラムの問題か、今のところうまく補正できていない。
補足: KGPS加速度解は4Hz解の2階差分なので、2Hzより高い周波数成分はとれていない。IMU内部サンプルレートは819sps (デフォルト) でデータシートFig.30を見ると、フィルタタップN=64で80Hz位までは取れそうなので、E-W/N-Sと比較するとU-D加速度の多くは現実の上下振動を拾っていると考えた方が良いだろう (どこまでちゃんとした値かは不明だが)。自動車エンジンの回転数は1000-3000rpmで、20-50Hzに主要スペクトラムを持つと思われるので加速度計はこれも拾っていると思われる。色々と調べてみるとそれ程変な観測値を出力している訳ではない。使いこなしは大変そうだが特性をちゃんと計測してパラメータをチューニングすれば使えないことはない、と思えてきた。(19:20追記)
覚書: DCM (Descreat Direction Cosine Matirx) とEuler角の変換。
ψbn=(Φbn,θbn,ψbn)' → Cbn=Rx(Φbn) Ry(θbn) Rz(ψbn)
ここでCbnはb-frame→n-frame座標系変換行列だが、ψbnはn-frame (すなわち地表) からみたb-frame (飛行機機体) のEuler角を表している訳ではない。このEuler角はψnbであり変換行列を求めるには以上の転置を取らなければいけない。ここはとてもconfusingなところでずっと嵌って抜け出せずにいた。
.....................................................................................................................................
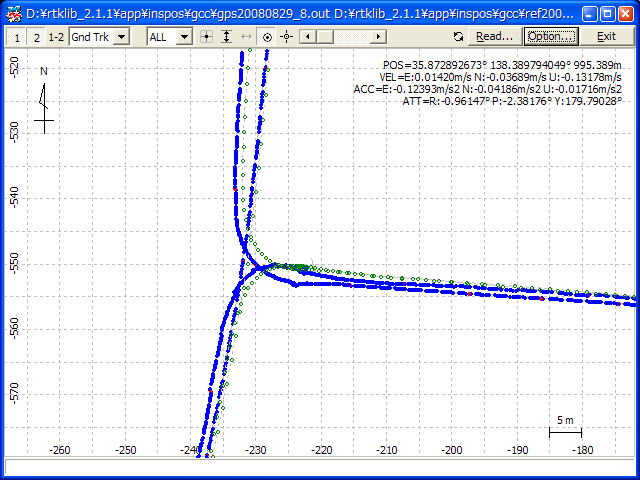
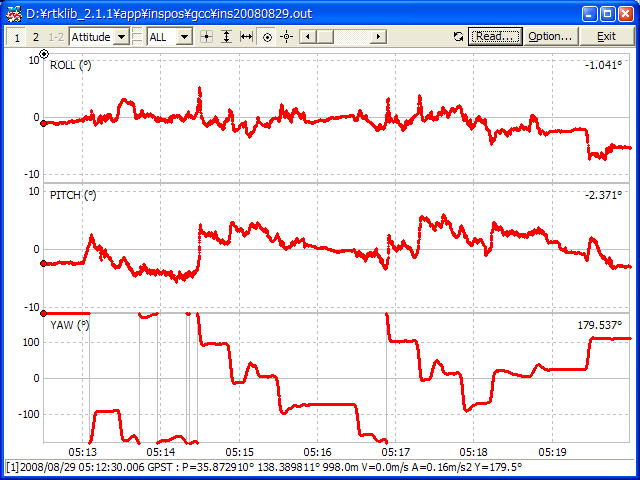
やっと出るようになったINS/GPS複合航法測位解
(青:INS解, 赤:GPS解, 緑:基準用KGPS)。更新頻度
GPS1Hz、IMU50Hz。ジャイロバイアス+加速度計バイアスは推定している。青い点に抜けが見られるのはログ取得時にデータ落ちを起こしている部分。
Yaw角はそれなりに使える気はする。座標変換で嵌って随分と時間をロスした。さてIONまで行き着くのだろうか。
.....................................................................................................................................
cross product (外積) と 3次元の skew symmetric matrix は等価である。気付いてみれば当たり前のことだが、今見ている参考書が外積を ^ で表しているのでちょっと盲点だった。
補足: Skew symmertic matrixの定義はAT=-Aなので正しくは対角0のskew symmetic matrixである。(9/17追記)
-------------------
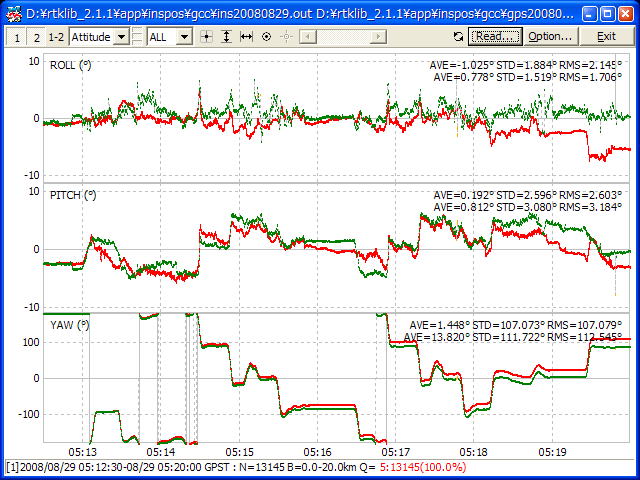
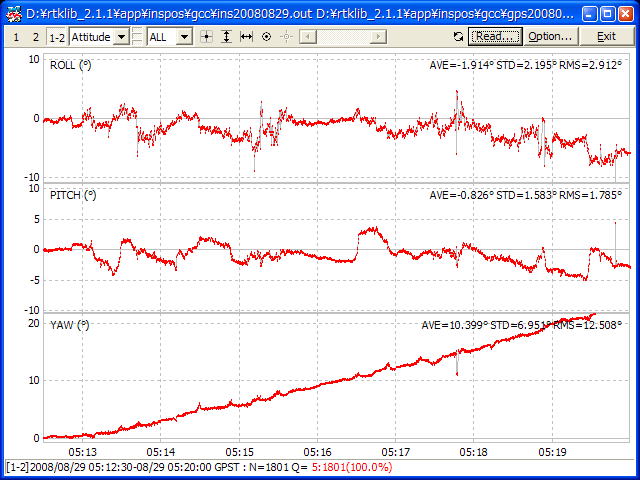
INS航法をもうちょっと改良してGPS姿勢計と比較した結果 (左、赤:IMU,緑:GPS)、差分(右)。なおジャイロバイアスは走行前静止状態2分の平均で推定している。INS航法そのものは問題なさそうなので、やっとINS/GPS複合航法に入る。
.....................................................................................................................................
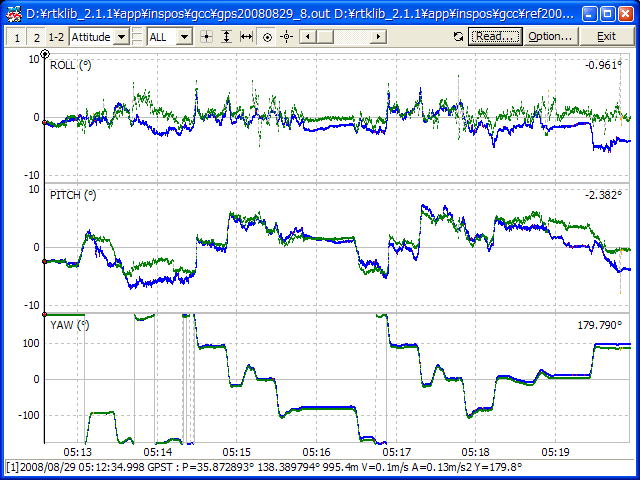
MEMS-IMUジャイロ単独による姿勢解(左) とGPS姿勢計による姿勢解(右)。ちゃんとした比較は取り付けアライメントを正確に計るか推定して補正する必要があるが、大きな傾向は分かる。GPS姿勢解のRoll角は基線長が短いのでノイズが大きいし所々ミスフィックスの影響が見られる。INS航法アルゴリズムの問題の可能性もあるがMEMSジャイロ解では7分の積分ででYaw角に40度のずれが出ている。Roll角、Pitch角も追従性があまり良くない。加速度計よりは随分まともだがやはり静止特性とは大きな差がある様だ。この程度の性能でINS/GPS複合航法の価値があるのだろうか、という気もしてきた。
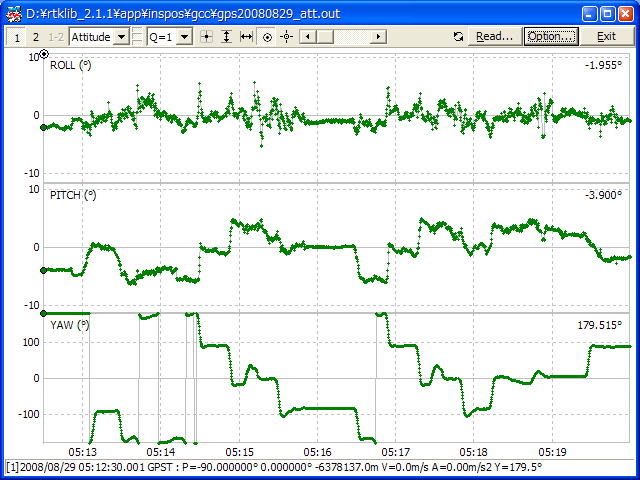
補足: IMUジャイロ角速度積分方法を改良したのと、GPS姿勢計のパラメータをチューニングしてほぼミスフィックスしていない解に置き換え。Yaw角ずれは7分で23度に小さくなった。ただやはりRoll角,
Pitch角の追従性が悪い。数分程度の時定数のバイアス変動が入っている様な感じである。(5:15:50-5:16:30の停止区間を見るとRoll,
Pitch角共に結構ドリフトしている) (23:30追記)
覚書: GPS姿勢計用ベストパラメータ。仰角マスク20度、速度推定有、Filter反復回数30、基線長拘束0.03m、コード/位相誤差比300、位相誤差
0.000m+0.003m/sinEl、初期誤差: 位置3m、バイアス3m、プロセスノイズ:速度水平10-2m/s、垂直10-4m/s。本当はGPS姿勢計用コードも新しく起こしたいのだけれどちょっと余裕がない。(23:42追記)
.....................................................................................................................................
| Home | by T.Takasu |