{kind=link}
{kind=link}
|
日記・備考録 |
2005 | 2006/1 2 3 4 5 6 7 8 9 10 11 12 | 2007 |
| January | February 2006 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 |
March | Home |
.....................................................................................................................................
ここのところTEC推定を試しているのはDGPS精度の目処をつけるため。DGPSを使って安価な受信機で10cm精度が出れば需要は大きい。DGPSで電離層補正がキーと言われることがあるがこれは必ずしも正しくない。電離層は2周波で簡単に推定できるし基準局が近くに有れば補正は容易だからだ。MSASの様な広域DGPSで基準局が近くに取れない場合は電離層が効くが日本ではユーザが限られるし今のように時間がかかっているとGalileo/近代化GPSが一般的になって補正の必要も無くなるだろう。ところで思いついたのだがDGPSにしてもRTKにしても基準局が十分に近くにあれば精度が出る。従って携帯基地局にDGPS/RTK基準局を併設しユーザに補正情報/RTK観測データを携帯電波で送信。基準局座標はスタティックPPPで定期的に校正すればいい。10kmメッシュ程度の密度があれば1周波RTKでも十分高速にFIXし1cm精度が出る。ただDGPSではマルチパスを何とかしないと1mは切れないが。これ誰か買いません。
日本におけるDGPSサービスについて少し調べた。主な一般利用可能サービスは2つ。衛星測位情報センタ(GPex)(FM多重放送)及び海上保安庁(中波ビーコン)。基準局はGPex7局、海上保安庁27局。その他GEONETを基準局に使った携帯経由商用DGPSサービスがいくつかある。基準局7局では1mを切るのは無理だと思うが結局一般ユーザ用はマルチパスが支配的でこれ以上細かくしても仕方が無いということなのかもしれない。
海上GPS利用推進機構というのもあるらしい。海上工事用だが共同利用DGPS/RTK基準局といった感じ。無線は何を使っているのか良く分からない。
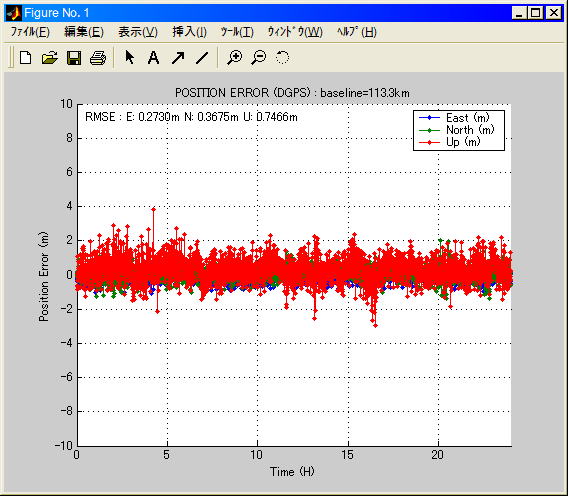
DGPS評価。何も考えず基準局での擬似距離測定値とモデル差を使って補正情報を作成しユーザ擬似距離測定値を補正。各誤差は分離していない。双方電子基準点で基線長113km。基準局/ユーザ局共にC1のみしか使用していない。結果。基準局マルチパスが補正情報に乗ってしまって雑音が少し多いがこれは搬送波位相も使えば削減できる。やはり電子基準点データでは条件が良すぎてDGPSの評価にならない様だ。
.....................................................................................................................................
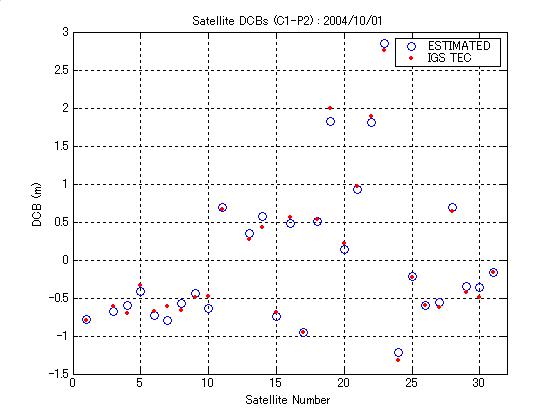
衛星DCB-IGS DCBs比較 追加。推定した衛星DCB(C1-P2)は24H分を時間平均して衛星平均が0になるようオフセットを加えている。IGS DCBsはP1-P2なのでIGS標準P1-C1バイアスを使ってC1-P2に変換。10cm程度の精度は出ておりDCB推定は上手く行っているようだ。受信機DCB(C1-P2)は比較するものが無いので評価が難しい。これを見ると推定DCBの符号はIGSとは合っている様だ。
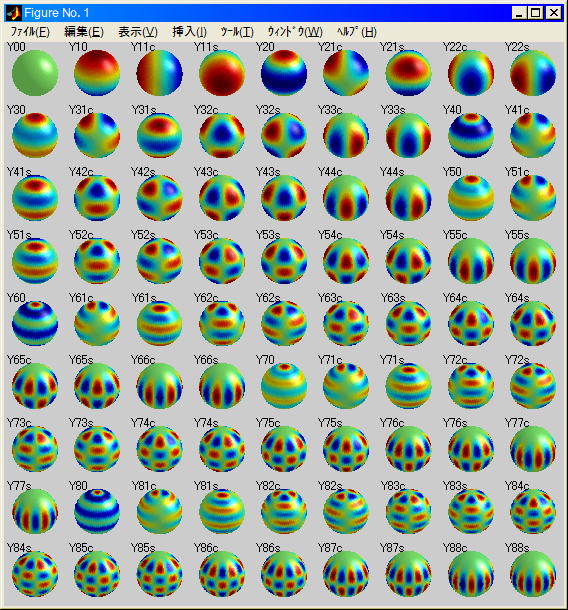
global tecモデルで使う球面調和関数 (表示プログラム)。使っているのは重力ポテンシャル展開に使う正規化したものだが調べてみると一般的なものに比較しsqrt(1/4π)の係数の違いがある。この差は何だろう。
.....................................................................................................................................
TEC推定について。通常は簡単なモデルと擬似距離GFのみでも残差RMSで50cm程度の精度は出るようだ。ただ電離層擾乱期はもっと悪化する。本格的にはもう少し複雑な電離層モデルと搬送波位相を使った方が精度が上がると思うが10cm以下の精度を得られるかは微妙なところ。GPSによる精密TEC推定は研究が進んでいないところ。ただ高精度広域補正や中長基線RTKにとってはキーとなる技術なのでもっとやる人が出てきても良い気がする。あんまりやる人がいないなら自分でやるしかないが。
論文、その他リンク
Summer Colloquium on Atmospheric Remote Sensing
Using the Global Positioning System, NCAR and COSMIC, 2004
凄いWebサイトを見つけてしまった。2004年夏に行われたGPSを使った大気リモートセンシングに関するセミナー。対流圏観測,
電離層観測, 掩蔽観測, LEO衛星軌道決定等々。高度で密度の濃いプログラム。大量のセミナー資料やReal
PlayerによるWebcastビデオが全部公開されている。とても全部は見切れないがGPSを使った大気観測研究者は必見だろう。
上のセミナー資料を見ていたらDCBの符号が±逆に定義されていた。正直どちらの定義が正しい(一般的)なのか良く分からない。推定している分にはどちらでもいいのだがIGS TEC等既存モデルを使う場合には注意が必要。
.....................................................................................................................................
電離層モデルと電子密度分布(TEC)推定 更新。global tecモデルの球面調和関数Yn0計算バグ修正。またglobal tec推定結果を更新。単純な計算ミスだが気付きにくい所。その他問題点等気付かれた方はご指摘いただけると有り難いです。
.....................................................................................................................................
論文、その他リンク
Global Ionosphere Maps Produced by CODE, Astronomisches Institut der Universtat
Bern AIUB
著名なCODE GIMの頁。DCBに関する詳しい説明がある。Block
IIRM(PRN17)が上がったのでP2-C2バイアスについて今後追加予定らしい。
電離層モデルと電子密度分布(TEC)推定 追加。TEC推定アルゴリズムデモプログラムを含む。P1-C1バイアスが結構大きいことが分かったため衛星DCBは最終的には受信機DCBと同時推定。そのままではDCB絶対値が決まらないので観測局#1DCB=0の拘束条件を入れている。そのうち解説追加予定。local tec推定の衛星DCBが大きく飛んでいるのは観測データ数が極端に少ない衛星。local観測では衛星の見え方にむらがあるので衛星DCBを安定に求めるのは難しい。ところで拘束条件付最小二乗や正規方程式のstackingについてちゃんと書いてある参考書が少ないのは困ったことだ。この点Berneseの取説は良く書いてある。
.....................................................................................................................................
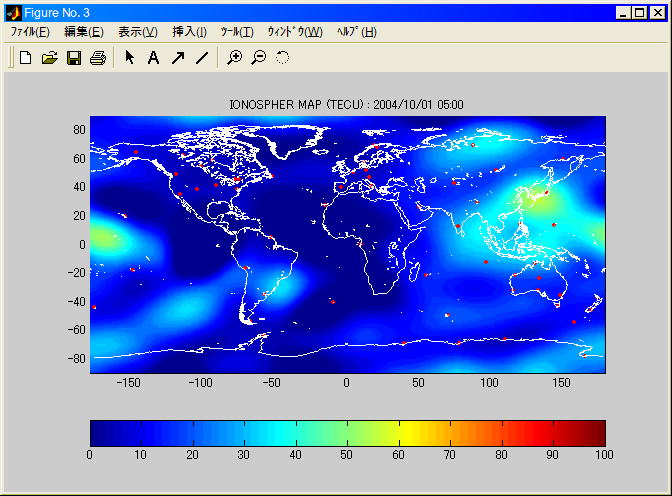
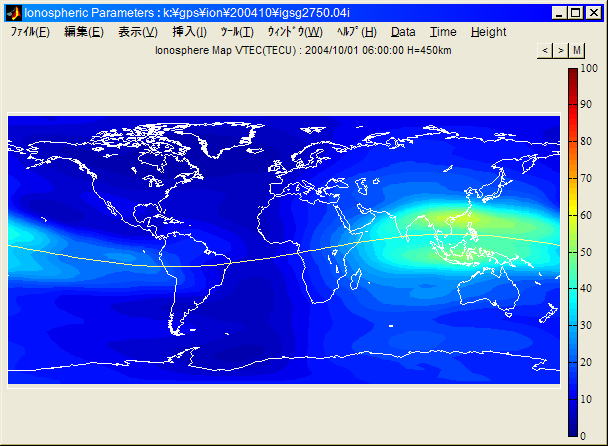
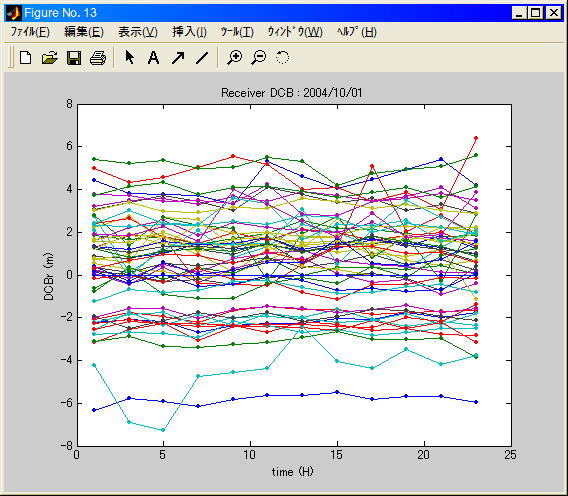
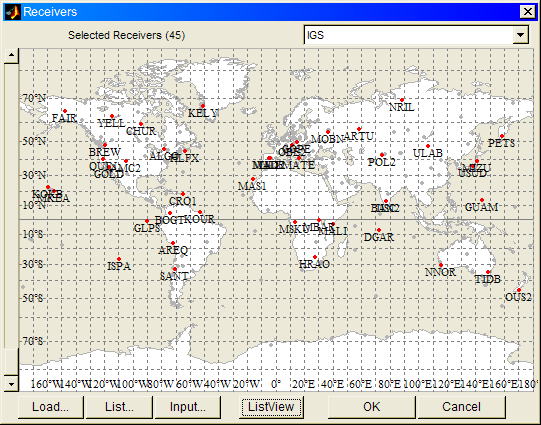
IGS60局によるGIMs。コードGFのみ。2H毎最小二乗。球面調和関数10次。赤点が使った局。南太平洋の局が少ないのでこの辺で振動が出やすい。IGS TEC。IGSの場合は200局15次程度で推定しているようだ。時間/空間分解能が高い場合は搬送波位相を使った方が良いが、これくらいなら平均効果によりマルチパスが低減されるので多分あまり差は出ないはず。DCBrが思ったよりばらつくので各解を結合して修正したほうが良いかもしれない。
.....................................................................................................................................
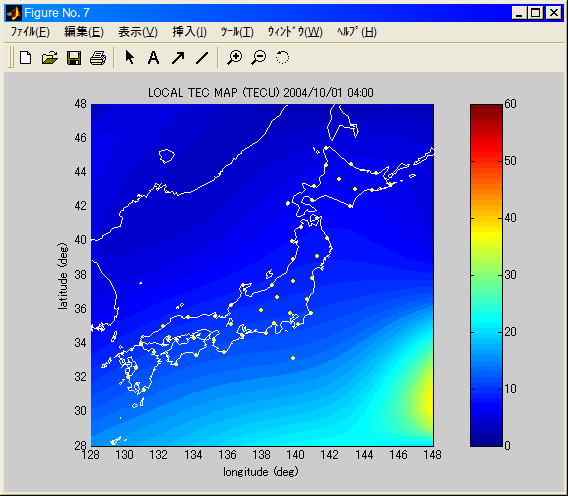
TEC関係色々。概ね数cmの精度でDCBs=C*(TGD-mean(TGD))*(1-f1^2/f2^2)の関係がある。ただしPRN8,9は差が10cmを超える。TGDはやはりP1-P2で定義されている様だ。ということはC/Aユーザは本当はTGDだけでなくP1-C1補正が必要ということになる。今日の成果。電子基準点49局によるLIMs。Single Layerモデル+コードGF。最小二乗。DCBsはTGD補正。DCBrは推定。プログラム約80行。やはり電離層は基本は簡単。
.....................................................................................................................................
高速PPP解析ソフトのキーになるEKF観測更新則の実行時間計測
(試験プログラム)。プログラム中のfilterekfはmexでMKLのcholeskyを呼んで最適化したものなのでこれ以上速くするのは難しい。1Hz×24H×2pathでの結果。time=15.703s。filterekf
172800回の実行時間8.421s。多分3GFLOPSくらいは出ていると思うが速い。これを見る限り1Hz×24H
PPPで120s/局は可能。
.....................................................................................................................................
訳有って少し寄り道にそれてTECの解析。これはこれで色々と悩ましい。特に擬似距離バイアスの取扱い。TGDとDCBsの関係やら、TGDは本当にP1-P2であってC1-P2ではないのか等々。
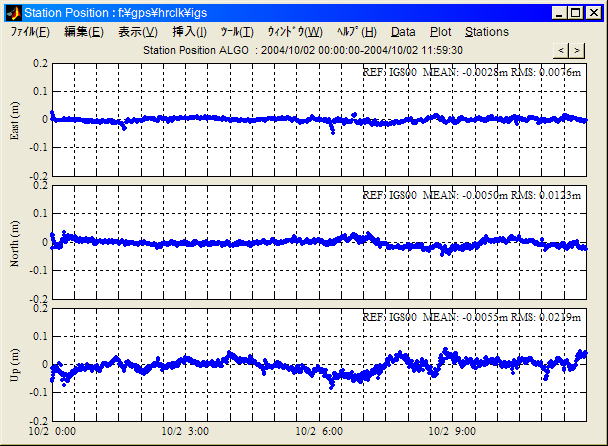
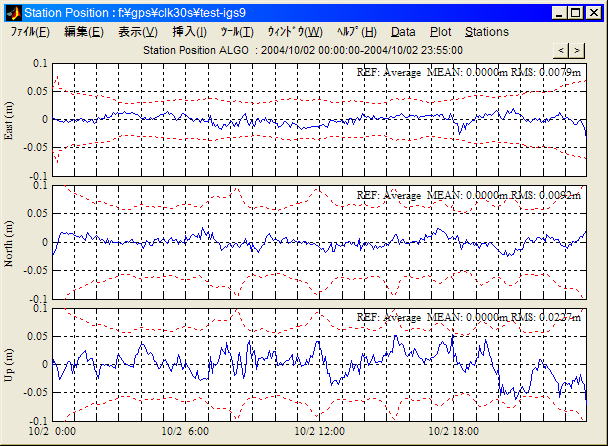
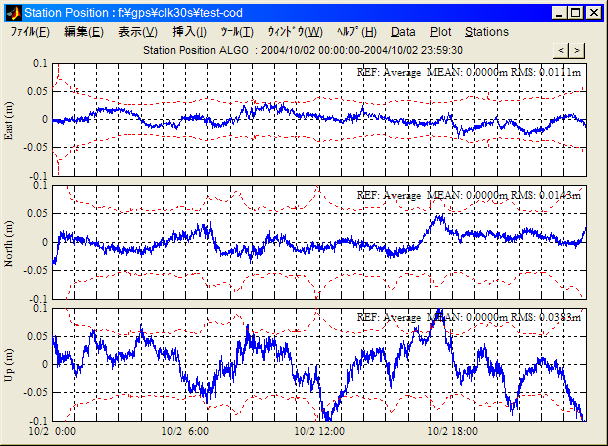
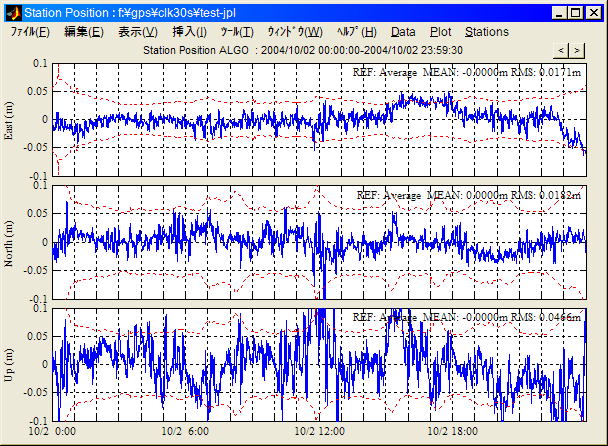
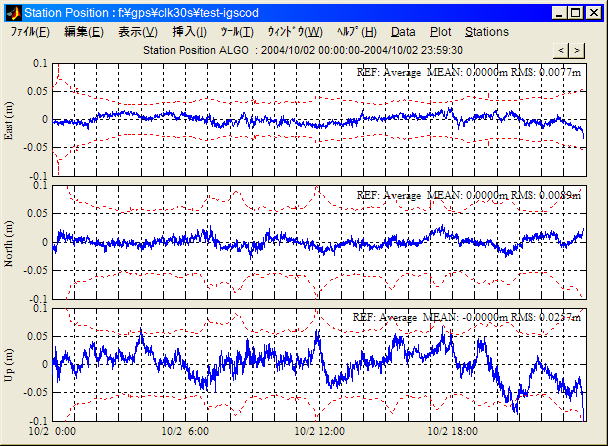
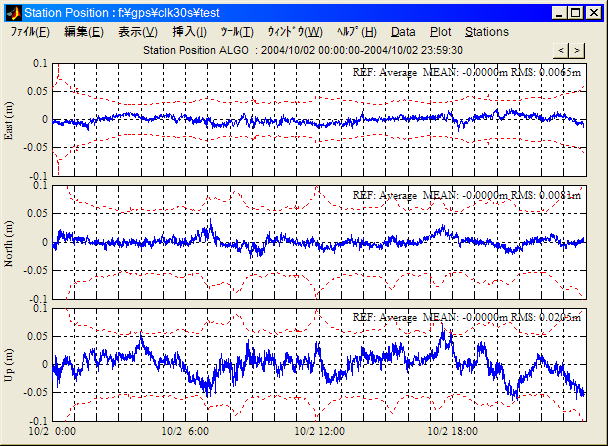
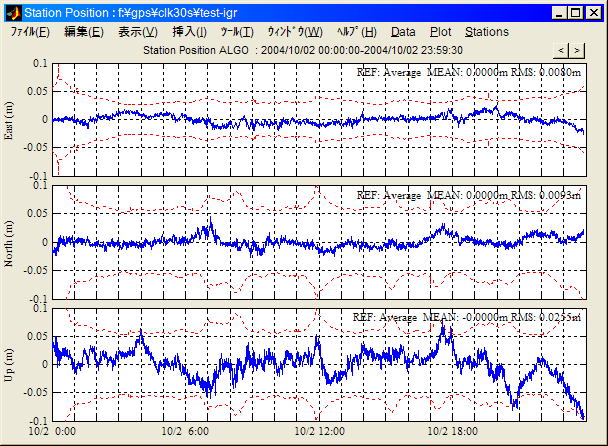
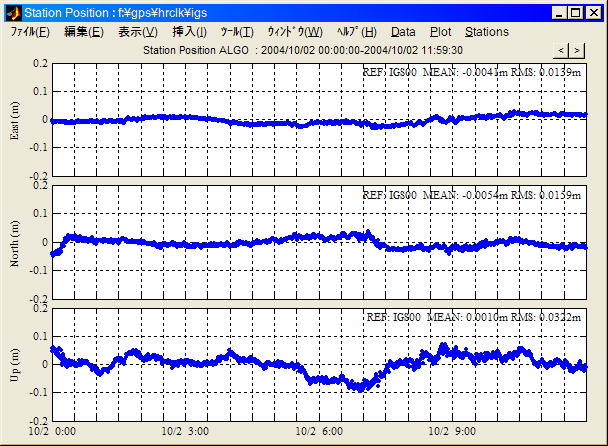
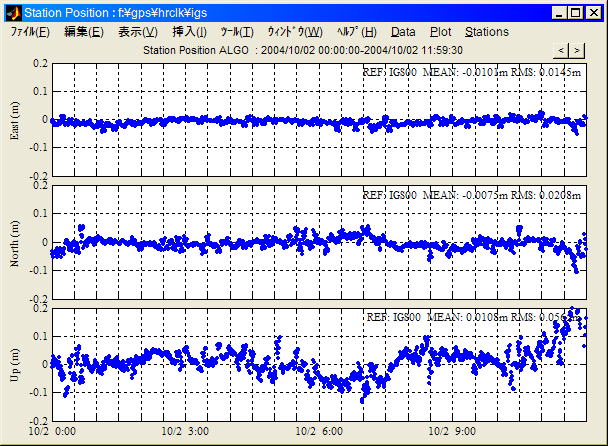
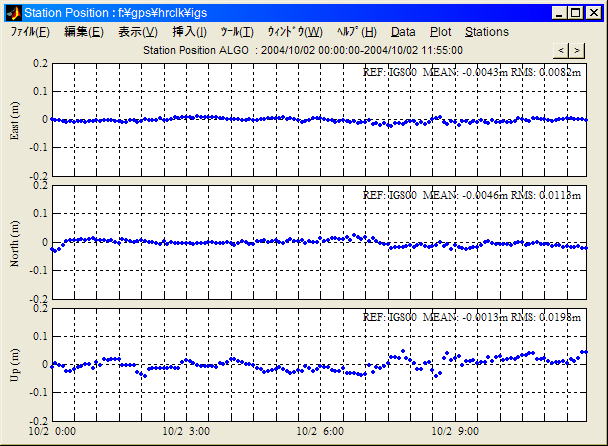
少し戻って30s時計の評価とPPPパラメータのチューニング。固定点 (ALGO) Kinematic PPP解24H分。IGS300s, CODE30s, JPL30s, IGS-IGS-COD30s, IGS-GT30s, IGR-GT30s。少なくとも水平は短基線相対測位に近いところまでやってきた。やはりIGS Finalの実力は凄い。JPLは予想以上に悪い。
論文、その他リンク
Y.Ohta et al., Large surface wave of the 2004 Sumatra-Andaman
earthquake captured by the very long baseline
kinematic analysis of 1-Hz GPS data, Earth, Planets and Space, Vol.58 No.2,
2006
スマトラ地震の地震波を1-HzキネマティックGPSで解析した例。GIPSYのbias-free解及びBernese相対測位(IISC-BAN2)。地震計と比較し得る感度が得られるとしている。名大太田氏からは論文を送って頂き問い合わせにも丁寧な回答を頂いた。有難うございました。
.....................................................................................................................................
PPP解析高速化について考える。色々と計算上の工夫と最適化をしてバイナリ化すれば精度を落とさず現在の計算速度の数10倍まではいくはず。今後高速PPP解析ソフトの開発予定だが性能目標を立てておく。5min×24H: 3s/局, 30s×24H: 10s/局, 1Hz×24H: 120s/局 (2パス, P4 3.2GHz)。ただし観測データ解凍時間は除く。GEONET1200局で5min1日分1H, 30s1日分3H, 1Hz1日分で40H。これで全局1Hz1日分をPC4台で並列計算して半日以内に処理できる。多分これくらいまでは可能だと思うのだが。
MTSAT-2/H-IIA9号機打ち上げ成功。おめでとうございます。ところでMSASはどうなっているのだろうと思って検索。MSAS試験信号の送信に関するページ。MTSAT-1R打ち上げが去年2月。気象衛星としてはとっくに実運用されているのにまだ試験中。正式運用今年末とのこと。大変悠長な仕事ぶり。まあ精度も2-3mだということだし無くても別に困っている人いないのね、という感じ。
.....................................................................................................................................
論文、その他リンク
K.Larson et al., Using 1-Hz GPS Data to Measure Deformations
Caused by the Denali Fault Earthquake, Science Vol.300, 1421-1424, 2003
2002年アラスカデナリ断層地震を1HzGPSで観測した例。地震計の加速度計測値を積分して算出した変位量と比較して地震計にはサチレーションの問題があるとしている。グラフに水平変動しか無いのは垂直は見せられないということか。GPS解の説明がない。Larsonのグループの他の発表を見るとGIPSYを使っている様だがPPPなのだろうか。
D-I.Blumenbach, High Precision Kinematic GPS Positioning
Of Ski Jumpers, ION GNSS 2004
ION GNSS 2004 CD-ROMを探していて見つけた応用。スキージャンプの軌跡をキネマティックGPSで解析。ヘルメットにGPS受信機/アンテナ等を装着しコンパクトフラッシュにデータ記録。機材重量260g。後処理相対測位。超短セッション高速ARのためレーザ検出アレイを使ってスタート位置/時刻を計測、所謂既知点法でARしているらしい。ジャンプの軌跡を解析して何が有り難いのか良く分からないが世の中には考えもつかない様なGPS応用があるんだと驚く。
使っている小型軽量GPS受信機ボードNovAtel OEM4-G2Lに興味があったので検索。10×6×1.6cm, 56g, 1.6W。2周波24ch 20Hz出力, USB付。APIがあってユーザプログラムを組み込んでオリジナル受信機に出来る。$1000位だったら評価用に買ってみようかと思って価格検索。なかなか情報がないがどうも$7000以上するよう。まだ2周波受信機高すぎ。何とかならないのか。
高時間分解能精密単独測位(HR-PPP)による地震波観測 (DRAFT) 更新。1Hz衛星時計推定値にIISC, BAN2局の位置変動が乗ってしまい地震波振幅が小さく計測されてしまう問題が見つかったため時計生成時にIISC, BAN2局を使用しないようにして再解析。
.....................................................................................................................................
LEO衛星PODの(多分)バグに関連して考えた。測位分野の論文では、こういう新しいアルゴリズムを使って解析したらこれだけ精度が出ました、といった感じのものが多い。でもここでアルゴリズムの確認に使っているプログラムは研究者がin houseで開発した品質管理など考えていないものが普通。もしかするとバグのせいでたまたま結果が良くなっただけなのかもしれない。意図的に結果を操作することだって可能。プログラムが公開されない以上本当はその結果の信頼性には疑問がつく。もちろん長期では別の研究者により追試され評価が定まっていくのだろうけれど。少し前に生命科学分野の論文偽造問題があったが研究のやり方には色々と難しい問題を含んでいる。
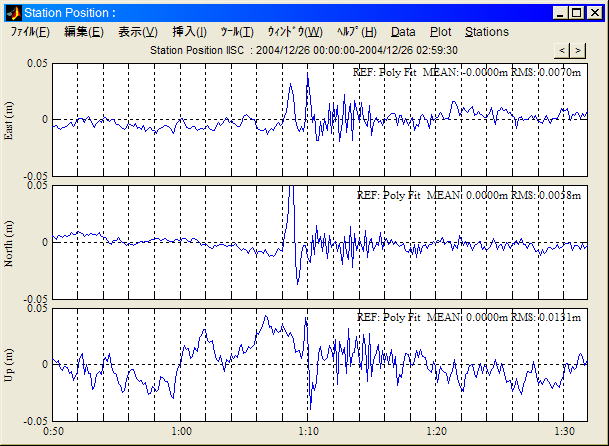
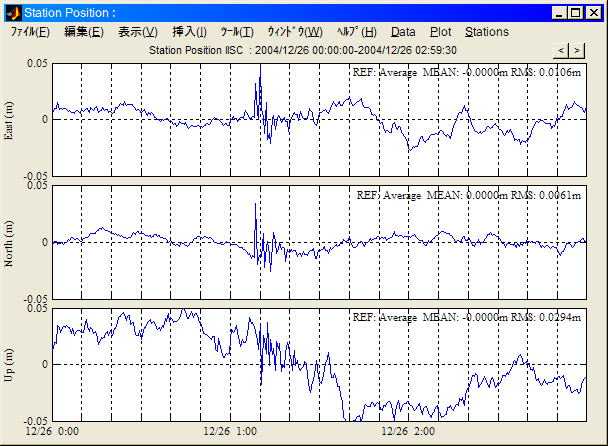
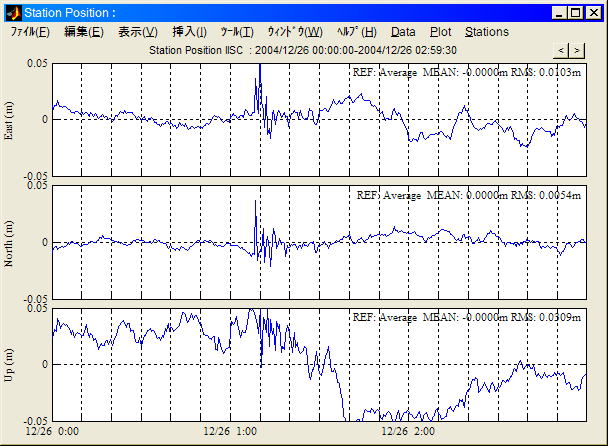
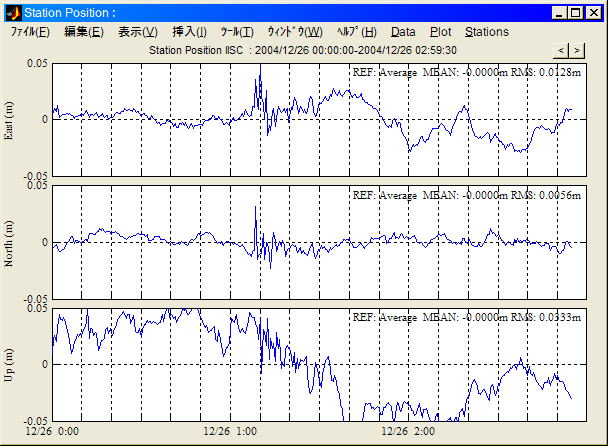
単純なsidereal filterの実装。前恒星日以前の測位解偏差をエポック毎平均して当恒星日の測位解から差し引く。使った日は1-2日前の2日分。結果(IISC 2004/12/26 1:00-2:00) : siderel filter無, sidereal filter有。2-10分周期の上下変動誤差成分が削減されている様に見えるが思ったより良くなるわけではない。もう少し高度な補正をやってみるか。
昨日のLEO衛星POD精度悪化原因判明。バグではなかった。現在色々とexperimentalな機能の実装と評価をしているのだがパラメータ設定でその機能がONになっていた。やっぱりあの機能はむしろ悪くなることが実証された。さて削除するかどうするか。
.....................................................................................................................................
論文、その他リンク
K.Choi et al., Modified sidereal filtering: Implications
for high-rate GPS positioning, Geophy. Res. Lett., Vol.31, 2004
sidereal filterはGPS衛星が1恒星日に同期して周回している事を利用して前日以前の測位解誤差成分を使って補正することによりマルチパス等の影響を削減する手法。実際のGPSの周回は1恒星日より平均9秒短いとして高レート解析ではこれを考慮する必要があるとしている。
sidereal filterの論文を読んでいて思いついた。相対測位では全部二重差を取るので色々な誤差項も二重差による相殺効果は得られるが逆に1way成分に分離するのが難しい。その点PPPは1way誤差成分を抽出するのはより容易でありsidereal filterの手法もより高度化することができる。うまくやれば対流圏補正残差, アンテナPCV+長周期マルチパス, 短周期マルチパスを分離することも出来る。一応これは(多分)先端の研究ネタ。
IGS-CODE-30s時計を使ったLEO衛星POD精度が出ないのでIGS
300sで確認したらこれも精度が出ない。前版のGT0.5.6でやり直すとちゃんと精度が出る。どうも色々いじってバグを作りこんでしまった様だ。仕方ないとは言えプログラム複雑になりすぎでこの手のバグは見つけるの大変。
.....................................................................................................................................
高時間分解能精密単独測位(HR-PPP)による地震波観測 (DRAFT) 追加。
1Hz衛星時計を使うと予想以上に綺麗に地震波を計測できることが分かった。これは面白い。
1Hz時計生成に使用した局はIGS45局。3H分の時計生成に約50分。IISC1局のPPP 3H分で約15分。3H分でもメモリがギリギリなのでこの辺がまず改良すべきポイント。あとは安定化と高速化。それから実用化に向けた評価。
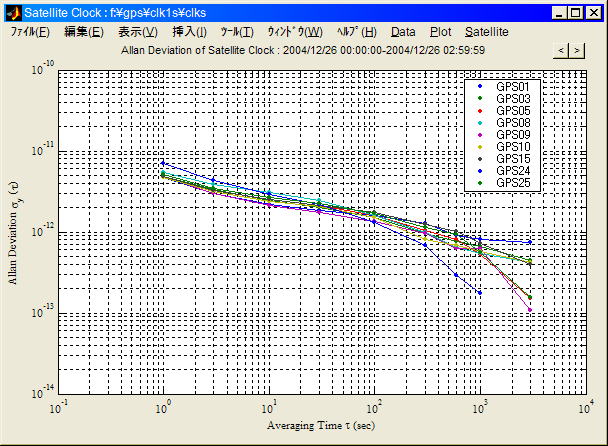
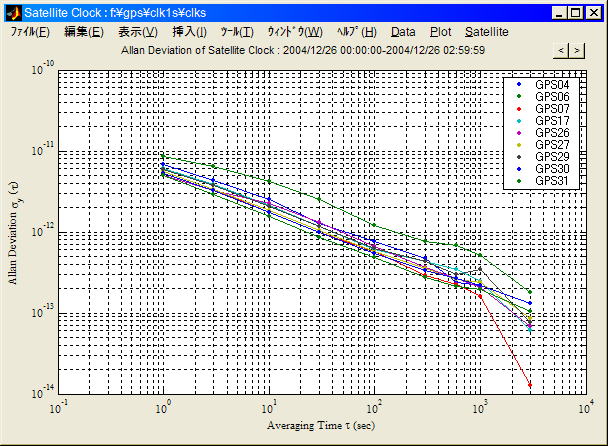
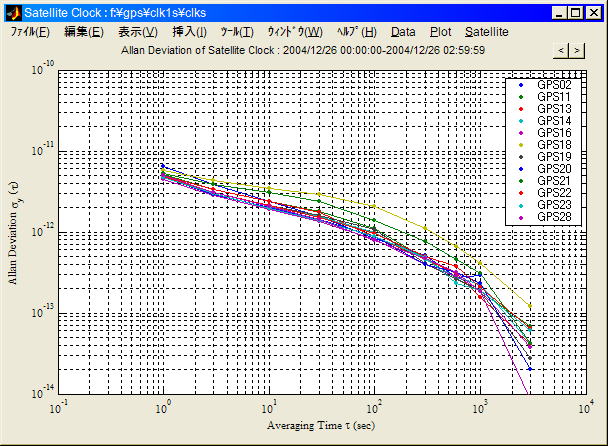
推定衛星時計による短期Allan Deviation。基準時計AMC2(HM)。2004/12/26 0:00-3:00。食期間+食後45分は誤差が大きくなるので時計は推定していない。
Block II/IIA Cs, Block II/IIA Rb, Block IIR Rb
短期ではCsもRbもあまり差は出ない。15sでの安定度1.5〜3.5×10-12なので30s時計中点補間誤差0.02〜0.05ns (6mm〜1.5cm)。同様に10s時計補間誤差0.01〜0.03ns (3mm〜1cm)。高時間分解能PPP(HR-PPP)の精度を確保するためには10s時計でも時間分解能不足。
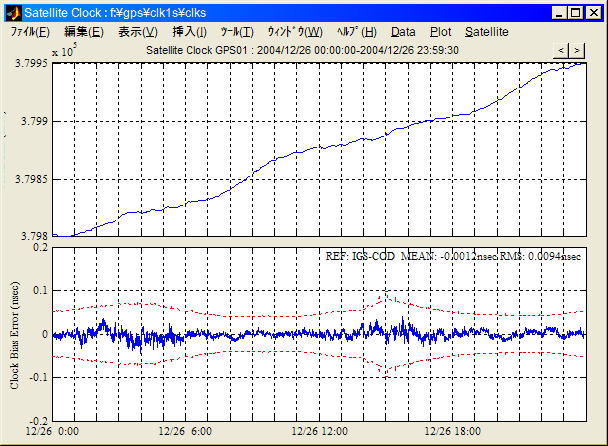
GT-1Hz時計とIGS-CODE-30s時計(IGS Final+CODE30s補間)の比較。概ね0.01ns (3mm) 以下の精度が出ている。IGS-CODE-30s時計は簡単に作れるので実用面では大変有用。30s PPPであればこれで十分。
論文、その他リンク
Y.Bock et al., Detection of arbitrarily large dynamic ground
motions with a dence high-rate GPS network, Geophy. Res. Lett., Vol.31, 2004
高レート連続GPS観測による地震波の観測。2002年アラスカ
デナリ断層地震(M7.9)を南カリフォルニアの1Hz
GPS観測網で計測した例。sidereal filterと呼ぶフィルタを使って50%のマルチパス及び日周変動を除去したとしている。Bockなので解析にはGeodetics社のRTDを使っているのだろうか。固定点のキネマティックPPP解にも少し長い周期の誤差成分が載る事が多い。これは主に対流圏補正残差とアンテナPCV/マルチパスが原因だが、連続観測点であればこれらを削減する方策は色々ある。これらの技術もPPPの高精度化には欠かせないので今後評価をしたい。
.....................................................................................................................................
効率を上げるためGTの大幅なリストラ。アルゴリズムが安定したらPPP解析エンジンはCで書き直し予定。
CODE軌道+30s時計を評価。絶対精度はIGS Finalに敵わないが細かい時計誤差は抑えられ安定性も良い。高レート衛星時計を安定に作るのにはやはり100局程度のデータがほしい。IGS局だけでは少し不足。ところでCODE30s時計の品質は良いのでIGS FinalをCODE30s時計を使って補間するとIGS品質30s時計が作れることに気が付いた。多分現在最も手軽に高品質の軌道+30s時計を得る方法。少しずるいやり方でもある。(3/6取り消し。補間には色々な注意が必要で簡単にIGS品質が得られるとは言えない)
やってみた (補間プログラム)。30s時計によるキネマティックPPP結果 (IGS-CODE, CODE, GT-30s)。スマトラ地震の地震波観測例。GT-30sは58局を使った結果。この例ではあまり差が出ないが長セッションでは差が出るはず。
GT-10s時計+キネマティックPPPによる地震波。10s時計の補間ではまだノイズが結構大きいので現在1s時計生成中。6H分一度に作ろうと思ったらメモリ不足で落ちた。もっとも恐れていた事態。Win版Matlabは実装サイズに関わらず700MBくらいまでしかメモリが使えないので少し大きな計算になると実用的でない。3Hでもダメ。-nojvm付で起動して100MB増やしてもダメ。
.....................................................................................................................................
色々と地道な改良中。1Hz解析を実用的な効率で実現するためにはPPP解析エンジンを新規に書き直した方が早そうだとの結論になりそうな雰囲気。
C.Vigny et al., Insight into the 2004 SUmatra-Andaman
earthquake from GPS measurements in southeast
Asia, Nature Vol.436, 201-206, 2005
GIPSY PPPによるスマトラ地震30s解析。$30也。1600km以内の東南アジア33GPS局の水平変動プロットがある。衛星時計は何を使っているのかは書いていない。地震波速度3.6km/sとある。データさえ手に入れば誰でも考えること。1500kmでも結構揺れているのでIGS
30s局全部, 1Hz局全部の解析も面白そうだ。
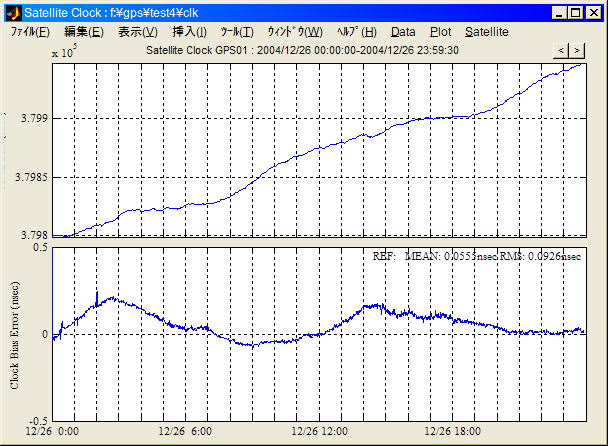
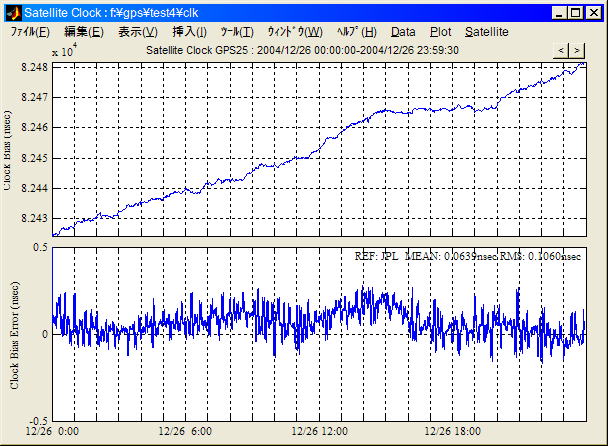
GT-30s時計とCODE30s時計, JPL30s時計との比較
(CODE, JPL)。衛星時計平均を0とした相対値で比較。JPL30s時計には±0.1ns程度の変な短周期雑音が乗っている。これが原因かJPL時計を使ったKinematic
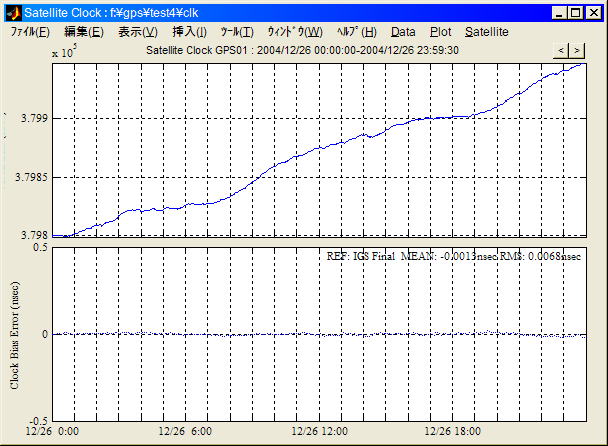
PPPでは数cmの短周期誤差が出る。CODEは短周期雑音は非常に小さい。これらの差はCODEとJPLの時計推定手法の差と思われるがどこに原因があるのだろう。ついでにGT-30s時計とIGS
Finalとの比較。300s間隔での比較だが概ね0.01ns(3mm)以内に収まっている。
.....................................................................................................................................
5月講演用の最低限のネタは確保できたので地道に少し回り道。まずはキネマティック測位では大変重要なcycle-slipリペアの改良。
昨日勢いで「GEONETの高レート解析は相対測位では無理」と書いてしまったがもう少し考えてみる。というのもリアルタイムの場合現在のところPPPでも解はないからだ。多点測位においてPPPに比較し相対測位が計算効率が悪いのは通常複数基線を同時推定している(多点解)のが大きい。すなわちPPPでは各観測点解を独立に解くので共分散行列を小さくできるが多点解の場合このサイズが大きくなる。行列計算コストは次元の3乗で効くので点数が増えると線形でしか効かないPPPとは加速度的に計算量に差がつく。相対測位では基線毎に解を独立に算出して(単基線解)、後で結合するというやり方も考えられる。これは測量分野ではいわゆる網平均として通常行われている手法である。この方法では基本的には相対測位でもPPPに比較し総計算量が多くなることはない。この方法の問題点は基線間の相関を無視しているため結合の際の誤差累積により固定基準点から離れた末端での精度が悪化する点と途中基線解が欠落したり精度悪化するとそれより下流の測位解が全部影響を受けるので全体として安定な解析が難しい点である。精度、安定性と計算量の折衷を取って国土地理院のルーチン解析ではバックボーンクラスタとローカルクラスタに分割しクラスタ毎に基線解を求め後から結合する戦略を取っている。ただこの方法でもクラスタ内基線解は同時推定しているので計算量増大は避けられず高レート解析は実用的ではない。またリアルタイムではバックボーンクラスタのための長基線RTKは確立された技術ではない。以上をまとめると相対測位による多点高レート解析は全く不可能というわけではないが精度、安定性と実用時間内計算を両立させるのは相当に難しい。リアルタイムPPPの可能性についてはまた次に。
.....................................................................................................................................
1secデータの処理はやはり大変。GTは今まで300sec解析にチューニングしてきたので1Hz解析を流そうとすると色々とボロが出る。測位計算も、高レートは単純な短基線相対測位、低レートやスタティックはBerneseやGIPSYのような複雑な計算を入れた精密解析と住み分けがされてきたように思う。PPPは原理的に複雑な補正を入れざるを得ないので計算高効率化は技術的課題のひとつである。RINEXにしても元々は精密解析用なので1Hzデータを取り扱うには効率が悪すぎる。多点高レート高精度測位には実用的にはまだまだ克服すべき問題点は多い。
ただ多点観測点解析の効率化を目的にPPPが開発されたことからわかる様にGEONETの様な巨大観測点網の高レート解析は相対測位では無理でPPPしか解はないことも確か。PPPはもっと注目を浴びてよい技術だと思う。
高時間分解能衛星時計推定とキネマティックPPPへの応用 (DRAFT) 追加。まだまだpreliminaryな結果。これから色々と改良する。1秒データが入手できれば1Hz解析に置き換える予定。
.....................................................................................................................................
IGS highrate局データ30局7日分ダウンロードに結局1日半かかった。のこり約50局分もダウンロード開始。3日近くかかるだろう。40局であれば1日分ダウンロードに6-7H。今の見積りで40局データを使っての1sec時計生成に1日分でPC数台で分割計算すれば1H以内。従ってIGS Rapidが出てからほぼ1Hで1cm精度級の1sec時計が利用可能になる。GEONET1000局PPP 5分間隔1年分にPC4台で約2週間。従って1sec間隔1日分で14*24/366×300=275H。1日分の解析を24H以内に行うのはPC50台以上が必要。ここがネック。PPPをあと10倍速くする必要がある。次のテーマ、高速PPP解析ソフト開発。
30sec衛星時計+キネマティックPPPによる2004年新潟県中越地震(M6.8)による電子基準点
960568 守門観測点位置変動。時計生成に約20分、PPPに約4分
(共に24H分, P4 3.2GHz)。やはりPPPはもっと高速化しないと多点数の1Hz解析では実用的でない。ちゃんした短中基線相対測位ではPPPより精度が出ると思うが基準点の動きを拾ってしまうのが問題。基準点を遠くに取ると精度が落ちる。RTDによる解析例。RTD結果の上下誤差は良く見ると20cm/grid。peakで上下±40cm近く飛んでいる。多分RTDの場合瞬時ARが悪さをしている。連続観測点の場合epoch-by-epoch
ARはミスFIXが増えるだけで意味がない。以下のPPPの上下変動は対流圏かマルチパスの影響だろう。対流圏補正は短中基線相対測位と比較した現在のPPPの技術的な問題点。
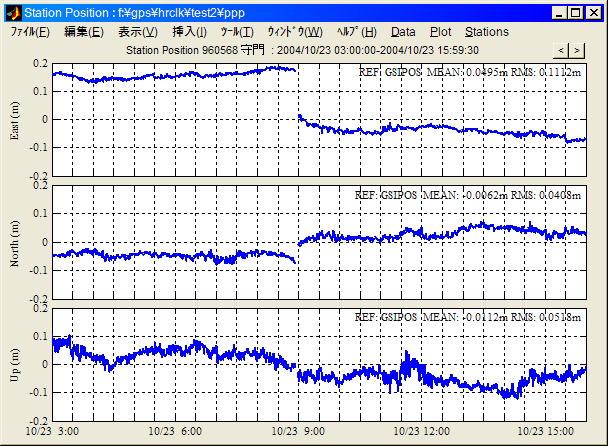
(本解析には国土地理院電子基準点データを使用しました)
上と同様に電子基準点950240 小千谷を少し拡大。9:34の余震(M6.5)の地震波が綺麗に捉えられている。これを見ると短周期誤差成分は小さく衛星時計は上手く推定できていることが分かる。1秒データがほしいな。
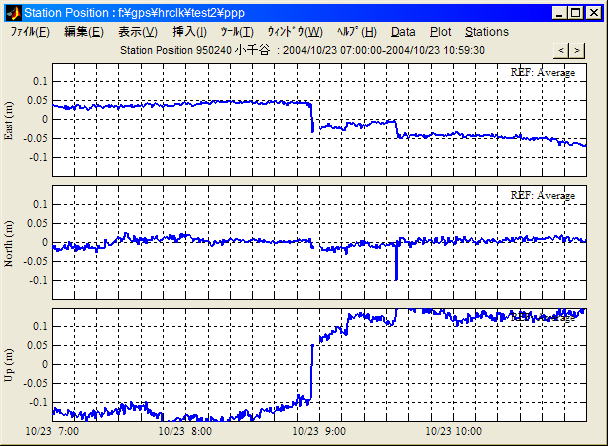
(本解析には国土地理院電子基準点データを使用しました)
.....................................................................................................................................
高時間分解能衛星時計の生成に当たってその絶対時刻をどう決めるかは結構難しい問題である。GPS観測では相対時計しか決定できないので通常は複数の高安定地上局時計や衛星時計のアンサンブル平均で絶対時刻を決めることが多い。IGS精密暦が準拠するIGSTやIGRTも複数高安定IGS局時計平均をGPSTになるべく合うようにalignし直して絶対時刻を決めている。作成した高時間分解能時計も基にしたIGSTやIGRTになるべく合致するように決めるのが自然であるがIGSTやIGRTは300sec間隔値しかないのでその間の時刻をどう決めるかは任意である。一つの案としては衛星時計平均が300sec間で線形に変化するとして決める方法がある。ただこれでは衛星時計の短期変動が時刻スケールに乗ってしまう。やはりHM局を時計基準局に決めてその変動が線形であると仮定して決めるのが現実的か。まあ測位の面では衛星時計間差が精密に決定できれば良いのでどう決めても構わないのではあるが。
昨日の晩から流しているIGS局1sec観測データのダウンロードが全然終わらない。ところで2004年末のスマトラ大地震解析用に1sec観測データがほしいと思ってCDDISのディレクトリを見るとまだデータは置いてある。確か1secデータは2週間くらいで消すとどこかに書いてあった様な気がするが全部残してあるのだろうか。CDDISはいったいどれだけの記憶容量があるのだろう。ところでサーバ整備に金がかかるのは分かるが国土地理院も電子基準点の1秒観測データを一般公開すべきである、ととりあえず書いておこう。
30sec衛星時計推定とそれを使ったkinematic
PPP。やっと最初の結果が出た。時計推定に使った局はIGS40局。ベースはIGS
FinalなのでCODEやJPLの軌道+30sec時計の結果より良い。参考のためIGS
Final 300sec時計の結果。まだ多々改良すべき点はあるがとりあえず目処はついた。1secはデータ量が多くなるだけで30secと条件はあまり変わらないので多分1secでもIGS
Finalと遜色ない精度は出るはずとふんでいるがどうなるか。
.....................................................................................................................................
高時間分解能衛星時計推定のためにGTに手を加えているのだがプログラムが複雑化し収拾がつかなくなりつつある。高機能化は良いのだが試験的な実装や一度も使っていない機能がそのまま残っているし設定パラメータの数が半端でなく増えている。本当はあと搬送波位相分離や擬似距離モデルと電離層推定を入れてDDの整数不定性決定を入れたいのだが多分無理。色々なパラメータ組合せでの動作検証は現実的に困難になりつつある。周辺モジュールはそのまま使えるので解析エンジンをDD用, PPP用, 軌道決定用等用途別に分離して再実装するのが現実的な様な気がする。どこかで数ヶ月時間をとって一気にrestructuringしてしまいたいが今の様に新しいアルゴリズム評価や実解析をやりながらは時間的に難しいし品質も落ちる。この辺長期での戦略を考える必要がある。
論文、その他リンク
J.Kouba, IGS orbit/clock navigation & sat. clock
interpolations with no SA, IGSMAIL-2824, 05 May, 2000
今更の感はあるがKoubaが衛星時計補間誤差について書いているIGSMAILを見つけた。2000年時点での各GPS衛星搭載時計安定度も含まれている。Block
II/IIAのCsとRb、Block IIRのRbでは随分と安定度が違うようだ。線形補間ではなく多項式補間の方が誤差を減らせるとあるが前に試みたときは差がでなかった。これは再評価してみよう。30秒時計の補間でも中点でCsでは3cm、Rbでも1cmの誤差は出るのでキネマティックPPPで1cm精度を出そうとすると最低10秒時計がほしいところ。GalileoはHMを積むので時計補間誤差の問題は少ないが搭載HMそのものが技術的に結構大変な様だ。しかしIGSも時計補間誤差の問題はずいぶん前から認識しているはずなのに何で今まで30秒や10秒時計プロダクトの検討をしてないのだろう。まあIGSが公式に高時間分解能時計の提供を始めたら研究ネタがなくなってしまうのではあるが。
2006/1/1現在のIGS High Rate Data (1sec) 局一覧
(リスト)。全82局。CDDISのhighrateデータディレクトリのファイルリストから生成した。40局程度あれば衛星が常時6局以上からは見えるので概ね良好な衛星時計が作れる様だ。これからこれらのうち良さそうな局を選定する。ただ1secデータは1局1日分で100MBくらい(非圧縮)にはなるので落とすだけでも大変。現在とりあえず30局1週間分download中。少なくとも一晩はかかるだろう。1secデータは実行時間も良く見積もっておかないと現実的な時間内で処理しきれなくなるので注意。
.....................................................................................................................................
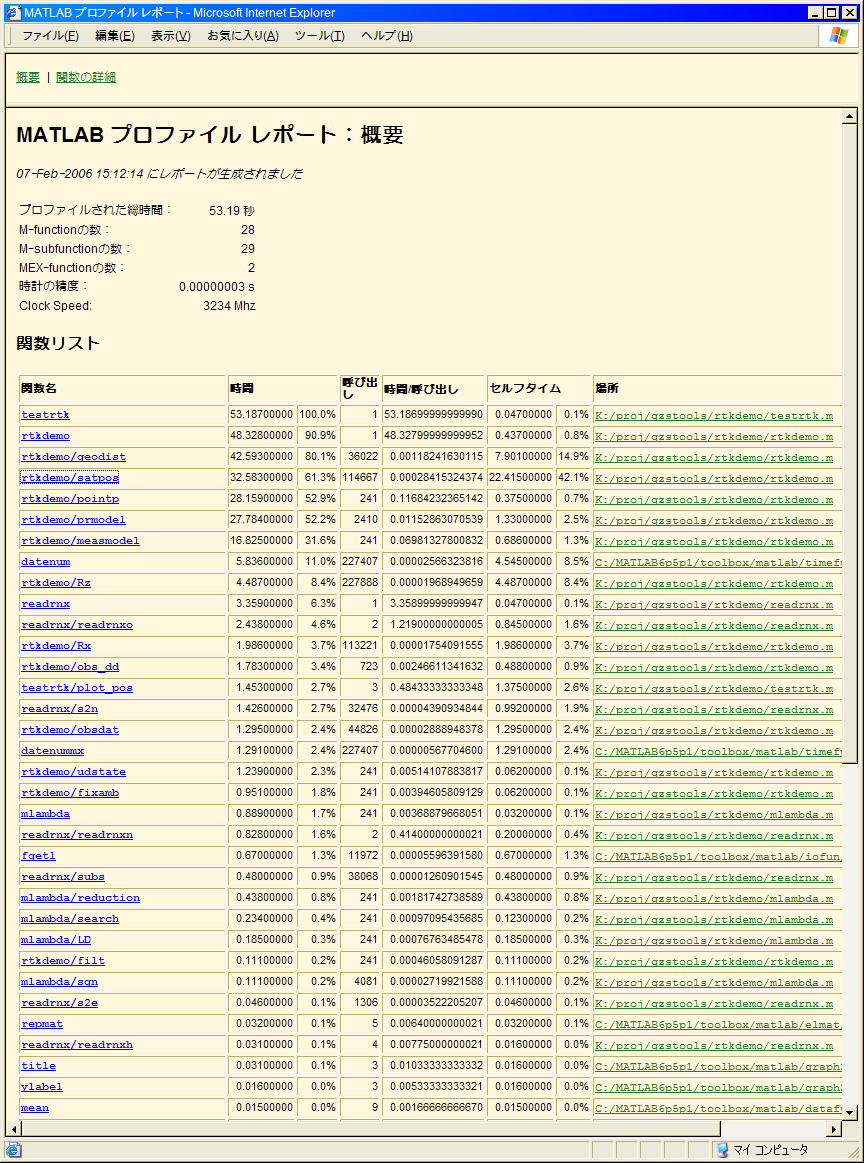
リアルタイムでは実行時間が重要なのでRTK処理時間の目処をつけるためRTKデモの実行時間プロファイルを取ってみる (結果, Matlab 6.5.1, P4 3.2GHz)。2H 241エポック分の処理時間である。1エポック分200m秒くらい。6割くらいは放送暦計算で食っているがここは工夫をすると10分の1以下にできる。Cに書き換えて10〜30倍くらいには速くなるので、ちょっと最適化すれば組み込み用CPUでも10Hzは可能だろう。ARが相当に軽い処理であることに注目する必要がある。
高時間分解能衛星時計推定。まずは測位計算時精密補正値内訳を出力出来るよう改修し精密補正項の線形補間精度を確認。やはり線形補間では1cm程度しか精度が出ないので一々補正計算が必要で手を抜けない。ZTDを推定値に固定する機能をGTに追加。これを使い局位置とZTDをPPP推定値に固定、受信機時計を0に固定し衛星時計推定する。後は100局程度の局を使った衛星時計推定値をエポック毎に最小二乗で結合して最終衛星時計を作る。この際時計絶対値を決めるため幾つかの水素メーザ局時計を強く束縛する。これでCODEの単純なphase-consistent interpolationより精度が出るはず。多分これで行けると思うのだがうまく行くだろうか。
.....................................................................................................................................
渡辺他, 暗号と格子, 数学セミナー vol.40 no.12,
2001
何故かウチの中に数学セミナーのバックナンバーが転がっていて、その中の「格子で考える」特集号で格子基底縮小と暗号への応用について触れられていたので読む。ほんのさわりだけしか書かれていないので欲求不満がたまる。かといって数学屋さんの書く原著論文は敷居が高すぎるしもう少し内容があって理解の容易な解説は無いだろうか。
日本地球惑星科学連合2006年大会講演申し込み。ネタは当日までに仕込む。一応目処はあるが内容がスカスカになるかどうかはこれからにかかっている。
演題: 高時間分解能GPS/GNSS衛星時計推定とキネマティックPPPへの応用
論文、その他リンク
RTCM Recommended Standards for Differential
GNSS Service, Ver.2.3, RTCM Special Committee No.104, 2001
RTCM Recommended Standards for Differential
GNSS Service, Ver.3.0, RTCM Special Committee No.104, 2004
RTCM Recommended Standards for Networked
Transport of RTCM via Internet Protocol (Ntrip),
Ver.1.0, RTCM Special Committee No.104, 2004
注文していたDGPS/RTK通信標準RTCM SC-104規格書届く。Ver.2.3はDGPS用に現行普及している版。Ver.3.0には主にRTK用メッセージ拡張が含まれているがVer.2.3とは互換性が無いようだ。Ntripは今後普及が見込まれるインターネット経由RTCMメッセージ放送プロトコル。これらはDGPSやRTKの実際の実装には欠かせない規格だがオンラインでは良い解説がないので取り寄せた。合計$150也。ちょっと最近参考書や文献を買いすぎの様な気もする。
.....................................................................................................................................
5月の地球惑星科学連合はRTKかPPPか迷った挙句、高時間分解能PPPで行くことにした。成果がまだちゃんと出ていない見切り発車だがあと3月半あれば何とかなるだろう。とりあえず継続的に何か出すことに意味がある。
.....................................................................................................................................
リアルタイムキネマティック(RTK)測位の基礎と実装 解説資料up。1/29に公開した実装例はこの解説で使っているアルゴリズム検証のために開発したもの。従って比較して見てもらうと分かりやすい。後半は少し荒っぽ過ぎる感がある。機会があれば見直してもう少しキチンとした解説としてまとめ直したい。
論文、その他リンク
N.Sirola, A Versatile Algorithm for Local Positioning
in Closed Form, 8th European Navigation Conference GNSS
2004
Leick(3rd Ed) 7.4.2で紹介のあるclosed-form
point positiningアルゴリズム。一般的に良く使われるGauss-Newtonによる非線形最小二乗と比較しており、最小二乗解では初期値によっては不正解に収束する場合があるとしている。確かに非線形最小二乗はうまく収束しないケースやローカルな極小解に収束してしまうケースを完全に排除するのは難しいかもしれない。一見確立されたアルゴリズムの様に見える単独測位も必ずしも単純とは言い切れないと言う事か。測位アルゴリズムの世界もいたるところにdeepな落とし穴が開いている様に思えてきた。
.....................................................................................................................................
GPS, Geodesy and Application Program GPS-GAP
Dr.LeickのwebpageだがGPS-GAPと呼ぶネット経由GPS/GNSS技術講習コースの宣伝。Dr.LeickはGPS Solutionsの編集主幹もしているらしい。
O.Montenbruck et al., Rapid orbit determination of LEO satellites
using IGS clock and ephemeris products, GPS Solutions, 9: 226-235, 2005
ゼロ差搬送波位相測定値と精密GPS軌道/時計を使ったLEO衛星(GRACE-B)精密軌道決定。DLRで開発したGHOSTと呼ぶPODソフトを使ったReduced
Dynamic解。EKFではなくバッチ推定。運動モデルには100次GGM01S,
Jacchia-71等を使っている。精密暦をIGU(15min),
IGR/IGS(5/15min), RTG, CODE(30s)と変えて評価している。JPL解比較位置RMS誤差で4〜11cm。ただし条件の悪い時期を外した評価結果。運動モデルを入れていることもあり時計時間分解能の高いCODE(30s)が最も良い。実はKinematic PPPによるLEO衛星PODでもJPL/CODE軌道+30s時計も評価しているがIGSに比較し精度が少し落ちていた。IGUやRTGが予想以上に良いが本当だろうか。これらの結果には運動モデルが相当効いているのだろう。前にも書いたがIGS品質の30s時計+運動モデルでは精度1cmを狙えるはず。ただ比較する相手が無いので検証は大変ではある。"JPL解がSLR比較で2cm精度"との記述があるが以前調べたときには5-7cmだったはず。この違いは何だろう。
.....................................................................................................................................
2月。1月当初の寒さが嘘の様な暖かさ。でもまだゆり戻しが来るだろう。1日東京に外出。
.....................................................................................................................................
| Home | by T.Takasu |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}