|
日記・備考録 |
2005 | 2006 | 2007 | 2008 | 2009 | 2010 | 2011 | 2012 | 2013/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2014 |
| June | July 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
August | Home |
...................................................................................................................................
何か、7月はあっ、という間に過ぎた感じ。そろそろサマースクールの準備を始めなければ。
-------------------------------------
SoftBank, 準天頂衛星「みちびき」を利用した位置情報の測位精度実証実験について〜モニター300名を種子島に動員し、日本の最先端技術の大規模実証実験を実施〜, 2013年7月26日
これ経産の補助金事業 (参照, 参照) なのか。まあ公募が「個人ユーザーの周遊が十分に把握できる一定の広域地域において、多数(100人以上)の個人ユーザーが準天頂衛星システムの測位補完信号・測位補強信号の利用実証を一定時間以上(8時間以上)行うこと。」だから内容こんなんになるわなあ、という感じ。\5,000万あるんなら... (以下略) という気がしないこともない。
しかし「GPSのほか、2D・3D空間認識などのトラッキング手法をハイブリッドに活用する世界初のマルチトラッキングシステム搭載のARと「みちびき」を活用し」って頭痛い。
補足: これ受信機なに使うのだろう。バッテリで最低8H動いて、BluetoothかWiFiでiPhoneかAndroid携帯にデータを飛ばす必要がある。L1SAIFとIMESも必須。これを100台以上調達する必要がある。これ使うのかもしれないけど、サンプル価格では予算オーバー。まあ数出れば安くなるのだろうけど。(8/1追記)
再補足: 拡張科学アドベンチャーRobotics;Notes。あまりキャラは趣味じゃない。(8/1追記)
再々補足: 提案書補足資料。受信機は「QZPOD」と呼ぶベンダント型受信機らしい。中身はcore社製かな。(8/1追記)
...................................................................................................................................
おお、Android版のRTKNAVIだ。いつの間に。
...................................................................................................................................
GPS World, Indian Regional GNSS Satellite Starts Signal Transmissions, July 25, 2013
IRNSS-1A衛星が信号送信を開始したらしい。独ワイルハイムの30mアンテナで受信したL5信号を解析している。スペクトラムもIQチャート (というのかどうか良く分からないのだけど) もあんまり見たことのない形で、何か特別の変調方式を取っているらしい。ただまだICD公開されていないので本当のところは良く分からないとのこと。
-------------------------------------
Intel Math Kernel Library Link Line Advisor
Intel MKLって線形代数ライブラリとしては滅茶速いんだけど、リンク難しいんだよね。バージョン変わるとすぐリンクエラー起こすし。という人向けに。バージョンやOS等条件を指定してあげると、リンカオプションを出力してくれる。この頁、何時出来たのだろう。もっと早く知っていれば苦労せずに済んだのに。
ところで、リンカで指定するライブラリの順序って重要で、順序を変えるとエラーになったりならなかったりする。今までは、ダメだったらとりあえず入れ替えてみて通ればOKという戦略で何とかなってきたのだけど、一般にこの順序ってどういう基準で決めるのが正しいのだろう。未だに良く分かっていない。
-------------------------------------
SPAC, 高精度衛星測位サービス利用促進協議会 設立総会, 平成25年7月26日, 一橋講堂
出てないけど、本日開催された高精度衛星測位サービス利用促進協議会 (QBIC) 設立総会の資料がアップされている。WGの活動計画等。言いたいことはあるけど、とりあえずノーコメント。
...................................................................................................................................
第57回宇宙科学技術連合講演会, 2013/10/9-11, 米子コンベンションセンター「ビッグシップ」
宇科連のプログラムが決まったのだけど。準天セッションの発表は意外と少ない感じ。さて日帰りは無理そうなので、飛行機で行って一泊かな。
...................................................................................................................................
SciPy.org, NumPy for Matlab Users
最近、matplotlibでグラフ描くことが多いのでnumpyでの各種操作の覚書用に貼っておく。やっぱり行列操作はmatlabが楽。
Mayavi: 3D Scientific Data Visualization and Plotting
ついでに使うかどうか分からないけど、python用のインタラクティブ3D可視化ツール見つけたので貼っておく。
...................................................................................................................................
O.Montenbruck et al., Innovation: Getting a Grip on Multi-GNSS: The International GNSS Service MGEX Campaign, GPS World, July 1, 2013
DLRのMontenbruckらがIGSのMGEX (multi-GNSS experiment) について書いている。Beidouの疑似距離に仰角依存のシステムバイアスが見えており、衛星内部のマルチパス起因でないかとしているが、これどうやって解析したのだろう。前MGEXのデータで解析した時はそんなの見えていなかったのだけど (参照)。これ追試が必要だな。
-------------------------------------
ここのところずっとVaio Pro持ち歩いているんだけど、やっぱりノートPCにとって軽いのは正義だなあ、という感じ。細かい不満や不具合はあるのだけど、それ程気にならなくなってきたし。
...................................................................................................................................
RT, Report: 'Upside down' sensors led to $ 1.3bn Proton-M rocket crash, July 10, 2013
先日のProton-MロケットによるGLONASS衛星の打ち上げ失敗は、角速度センサを逆に取り付けるというヒューマンエラーが原因ではないかとのこと。爆発で慣性誘導装置の回収は難しいと思うので事の真偽は不明。
補足: ニュースソースはこのWeb記事らしい。これ読むと機体の残骸を調査し、DUSと呼ぶ角速度センサが上下逆に取り付けられていたことを発見したとのこと。どれくらい信頼できる情報なのかはよく分からない。(15:16追記)
...................................................................................................................................
やっとデータ移行が大体終わったので、MBA (2010)と比較したVAIO Pro 13"の感想。
(1) 軽い。400gの差は大きい。でも筐体の剛性感がないのでキーボードもペコペコしていて打鍵感イマイチ。ヤワなので取り扱いも注意が必要で、ラフに扱うとすぐ壊れそう。その点MBAは安心感が違う。
(2) 画面は綺麗。音も良い。でも低負荷でもファンが回るし下面と排気口は結構熱くなる。MBAは殆ど熱くならないし高負荷かけなければファンは回らない。
(3) バッテリは普通の使い方だと6-7時間位。MBA
(2010) とほとんど変わらない感じ。多分MBA
(2013) とは大差がある。
(4) スリープからの復帰は 6-7 1-2 秒で快適。MBA (2010) はスリープに不具合あって起動に1分はかかってた。
(5) スライドパッド操作性最悪。タップ&ドラッグの感度調整が出来なくて3回に2回はドラッグに失敗する。マウス必須。比べないと分からないのだが、MBAのスライドパッドは最高。
(6) Windows 8 最悪。色々といじってやっと使える様になってきた。何でこんなの出したんだろ。
ということで、結論からするとやっぱりMBA (2013) にBootcampでWindows 7を入れた方が良かったかなあという感じ。迷ったんだけどね。
補足: スリープからの復帰は1-2秒でとても快適。ただWindows Live Mailがオフラインから復帰しない不具合。調べるとこれどうもIE10の不具合みたい。再インストールしないでも、IE10のメニューでオフライン→オンライン作業に切り替えてあげれば復帰する (参照)。これ早くupdateして欲しいんだけど。(7/12追記)
補足: VAIO PROのWindows エクスペリエンスインデックスは6.9, 7.6, 6.3, 6.3, 8.6。ついでに恒例のmatlabベンチ。なおVAIO PROはBIOSでhyper threadingを切れないので2-core, 4-threadで動いている。(7/12追記)
>>bench;a=rand(2000);b=rand(2000);tic,c=a*b;toc,tic,c=inv(a);toc
| LU | FFT | ODE | Sparse | 2-D | 3-D | a*b | inv(a) | PC | Matlab version | OS |
|---|---|---|---|---|---|---|---|---|---|---|
| 0.08 | 0.10 | 0.06 | 0.09 | 0.21 | 0.14 | 0.26 | 0.45 | *1 | 7.12 (R2011a) 64bit | Windows 7 64bit |
| 0.08 | 0.12 | 0.18 | 0.29 | 0.64 | 0.79 | 1.10 | 1.55 | *2 | 7.11 (R2010b) 64bit | Windows 7 64bit |
| 0.14 | 0.13 | 0.07 | 0.13 | 0.31 | 0.19 | 0.46 | 0.72 | *3 | 7.13 (R2011b) 64bit | Windows 8 64bit |
(sec, *1 Core i7-2600K 3.4GHz, RAM 16GB, ATI Radeon HD5450, *2 Mac Book Air 13" C2D 2.13GHz, RAM 4GB, SSD 256GB, *3 VAIO PRO 13" Core i7-4500U 1.8GHz, RAM 8GB, SSD 256GB)
...................................................................................................................................
GPS World, 2C or Not 2C: The First Live Broadcast of GPS CNAV Messages, Juny 8, 2013
6/15-29に実施されたGPSのCNAV放送試験の解析。ISC (inter-system corrections) の内容見ると結構L5I5とL5Q5間のバイアスが大きくて1ns以上ある様。ところでこのバイアスってI/Qクロストラッキングする受信機の場合無視できないと思うのだけど、どう処理しているのだろう。ちゃんとやるならQ(P)→I(D)→I/Qって遷移するのかな。というかI/QクロスでCNAVサポートしている受信機自体まだほとんど無いのかも。
-------------------------------------
日経, 日本発・宇宙インフラ事業をアジアに、14兆円市場にらみ産学官が連携, 2013/5/6
日経, 宇宙政策転換で生活の質向上 開発から「利用」重視へ, 2013/5/22
ちょっと古い記事だが貼っておく。ところで、「全地球測位システム(GPS)を使い、人や建物の位置を高精度で把握・解析できるソフトウエア」って何を指しているのだろう。
...................................................................................................................................
匿名ブログにコメント書いても仕方ないのかもしれないけど。
「準天頂衛星が4機で運用される確約はされていない」→ これは既報道の通り予算確定・調達契約済み。
「高精度衛星...参加誘導」→ 的はずれな気がするけど、協議会の位置づけが良く分かっていないのでノーコメント。
「4機体制だけでなく、7機体制を狙っている」→ そういう意図で情報を流している人もいるかも。でも、7機の目的は主に技術安全保障であって、精度が出ないのは皆承知済み、というのが私の理解。
「新聞社...ネタが無い」→ まあ大体合意。新聞記者の方はもう少し勉強してね、とは思う。
-------------------------------------
D.Grieneisen, Real Time Kinematic GPS for Micro Aerial Vehicles, 2012
MAV (micro aerial vehicles) へのRTKの応用。RTKはublox LEA-6TとRTKLIB。精度評価のリファレンスとしてLeicaの自動追尾トータルステーションを使っている。MAVって何だろう、と調べたら、15 cm以下の小型UAVの事らしい (参照)。RTKLIBのROS (robot operation system) へのラッパーも実装している。ROSって何だろう、と調べたら、これらしい。結論としては思ったより性能悪いね、ということみたいだけど、ANN-MSとLEA-6Tじゃ移動体で性能出る訳ないよね、という気も。ちなみに、RTKLIBのROSラッパーはGitHubでRTKLIBROSとして公開されている。
ということで、暑いんですけど。と思ったら甲府で最高気温38.2度か。
...................................................................................................................................
VAIO Pro 13来た。タッチパネルなしで940g。まあ軽いんだけどMBAのアルミ筐体に比較するとやっぱりヤワな感じ。力掛けるとバキッと行きそう。思ったよりファンが回るのも気に食わないところ。あとやっぱりWindows 8使いにくいなあ。ということで、SonyのAPは殆どアンインストールして、Start Menu 8をインストール。まだあんまり使ってないけど、残り:14時間26分 (98%) って出るのでバッテリ持ちはそれなりに優秀そう。
補足: これ見ると新MBA 13"にWindows 7入れた方が良かったかも。しかしWindows 8のスタート画面を完全に殺すのはどうすれば良いのだろう。(7/8追記)
補足: スライドパッドの右端からのスワイプでWindows 8のチャームを出さないレジストリ設定。
HKEY_CURRENT_USER\Software\Synaptics\SynTPEnh\ZoneConfig\TouchPadSMB2c\Right Edge Pull\ActionType->0
これやらないと頻繁にチャームが出て鬱陶しい。しかしレジストリいじらないと変更できない酷い設計何とかして欲しい。(7/8追記)
...................................................................................................................................
R.Dach, Bernese GNSS Software: New Features in version 5.2, July 4, 2013
Bernese 5.2の新機能の紹介。実装としては、GLONASS, QZSS, Galileo, BeiDouに対応済みだが、試験はGPSとGLONASSしかしていないらしい。総コード量が43万行とある。
ちなみに、RTKLIB 2.4.2は約6万行。MADOCAはコア機能だけで3万行くらい。ユーティリティとか試験用コードを含めてもBerneseの約1/4。ただこっちは、ほぼ一人で書いてるのだけど。
...................................................................................................................................
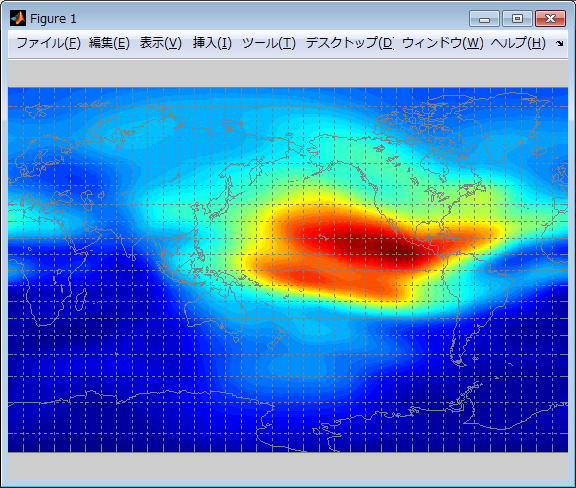
昨日の例をmatlabで書くとこんな感じ。地図描画はm_mapを使っている。コンパクトに書けるのだけど、線にアンチエイリアスが効かないのがちょっとイマイチ (Windows 7 + matlab R2011a)。
% matlab plot test
data=textread('ion.txt');
[lon,lat]=meshgrid(0:2:360,90:-2:-90);
figure();
axes('position',[0 0 1 1]);
m_proj('miller','long',180);
m_contourf(lon,lat,data,0:.1:12,'edgecolor','none');
m_coast('color',[.5 .5 .5]);
m_grid('color',[.5 .5 .5],'xtick',0:10:360,'ytick',-90:10:90,...
'xticklabes',[],'yticklabels',[]);
-------------------------------------
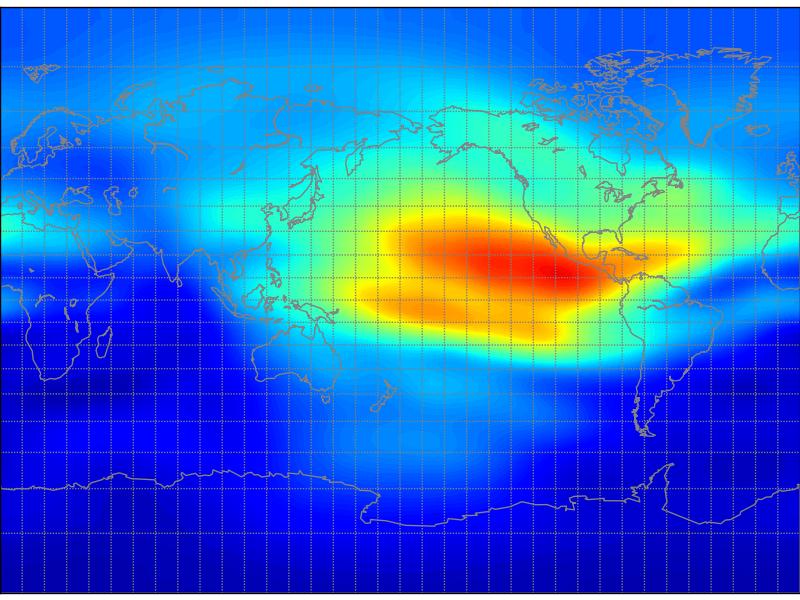
必要あってmatplotlibとbasemap toolkitで地図上にcontour描く練習。0:.5:10を、np.arange(0,10.5,.5) とかやらなければいけないのがちょっと面倒だけど殆どmatlabのplotと同じ。線もアンチエイリアスかかって綺麗だし。
#!/usr/bin/python
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.basemap import Basemap
data=np.loadtxt('ion.txt')
lon,lat=np.meshgrid(np.arange(0,362,2),np.arange(90,-92,-2))
fig=plt.figure()
ax=fig.add_axes([0,0,1,1])
m=Basemap(projection='mill',lon_0=180)
x,y=m(lon,lat)
m.contourf(x,y,data,np.arange(0,12,.1))
m.drawcoastlines(color=".5")
m.drawparallels(np.arange(-90,90,10),color=".5")
m.drawmeridians(np.arange(0,360,10),color=".5")
plt.show()
-------------------------------------
NASA Spaceflight.com, Russian Proton-M fails at launch and crashes into spaceport, July 1, 2013
2013/07/02 02:38 UTC, 3機のGLONASS-M衛星、カザフスタン バイコヌール宇宙基地からProton-Mロケットで打ち上げられたが、打ち上げ失敗。ロケットは打ち上げ直後に正常進路をはずれ炎上、射場に落下し爆発。
打ち上げ中継のYouTube動画見ると慣性誘導装置の故障か何かか? しかしロシア、ここのところ衛星打ち上げ失敗目立つなあ。GLONASSに関しても、2010/12/05の3機の打ち上げ失敗に続いて4回目。前回の失敗は上段ロケットの燃料積載量の計算ミスが原因と言われているが今回はロケットそのものの不具合の可能性が高そう。次は、今年後半にSoyuz-2による1機のGLONASS-Mの打ち上げが予定されているが、今回の失敗を受けて日程は流動的。
補足: RiaNovstiの記事。これ見ると2010/12のGLONASS打ち上げ失敗後、ロシアは2011/8/18, 2011/8/24, 2011/11/9, 2011/12/23, 2012/8/7と立て続けに衛星打ち上げ失敗を繰り返している。(19:32追記)
-------------------------------------
NASA Spaceflight.com, Indian PSLV successfully launches IRNSS-1A navigation satellite, July 1, 2013
2013/07/01 18:11 UTC、IRNSS-1A衛星、インド サティシュ・ダワン宇宙センターからPSLVロケットで打ち上げ成功。IRNSS初号機で軌道は東経55度、軌道傾斜角29度のIGSO。IRNSSとして、今後同一軌道に1機、東経111度のIGSO軌道に2機、東経34, 83, 132度の静止軌道に3機の衛星を打ち上げ、インドで精度20mの測位サービスを提供する。IRNSS-1A衛星は、I-1K衛星バスを使用し、質量は1,425kg (推薬込) 614kg (ドライ)。次のIRNSS衛星の打ち上げは来年3月の予定。
...................................................................................................................................
GPS Derectorate, Global Positioning System Modernized Civil Navigation (CNAV) Live-Sky Broadcast Test Plan, May 30, 2013
これもノーチェックだったのだけど2013/06/15-06/29にGPS L2C/L5 CNAVの放送試験を行っていたらしい。受信機側の試験も意図している様だが、今CNAVちゃんとデコードできる受信機あるのかな。
-------------------------------------
2013/05/15に打ち上げられたGPS Block IIF-4 SVN66/PRN27が、2013/06/21から正式運用を開始していた。忙しくてノーチェックだった。これ衛星パラメータのテーブル書き変えないとダメだな。
-------------------------------------
Galileo 27機+BeiDou 35機+QZSS 4機構成での可視シミュレーション。東京での最大可視衛星数55 (仰角マスク10度)。TLEファイルはこちら。
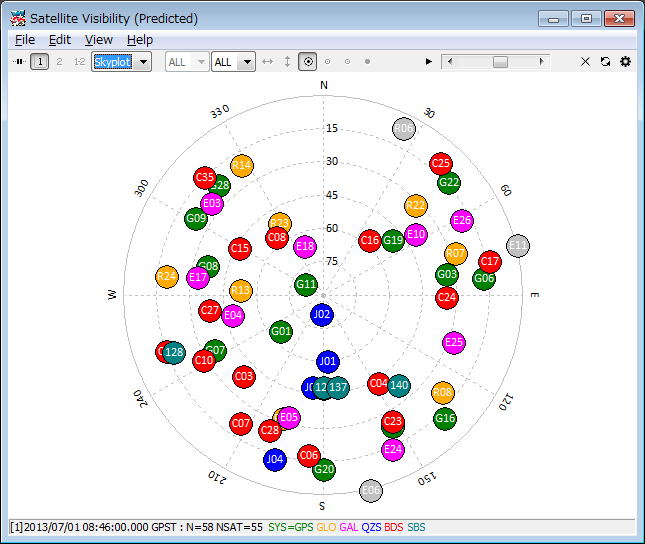
補足: リリース版のRTKPLOTではQZSSの衛星数は3機までなので、J04は表示されない。衛星数を増やすためにはrtklib.hの定数を書き変えて再ビルドが必要。(7/2追記)
...................................................................................................................................
| Home | by T.Takasu |