|
“ْ‹LپE”ُچlک^ |
2005 | 2006 | 2007 | 2008 | 2009 | 2010 | 2011 | 2012 | 2013 | 2014/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2015 |
| April | May 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
June | Home |
...................................................................................................................................
IGS Workshop 2014, Celebrating 20 Years of Service 1994-2014, June 23-27, Pasadena, California, US
IGS 20ژü”N‹L”O‚جƒڈپ[ƒNƒVƒ‡ƒbƒvپBچ،‰ٌ‚ح•ؤچ‘ƒJƒٹƒtƒHƒ‹ƒjƒAڈBƒpƒTƒfƒi‚جƒJƒٹƒtƒHƒ‹ƒjƒAچH‰ب‘هٹw‚إپB4”N‘O‚ح‰pچ‘ƒjƒ…پ[ƒLƒƒƒbƒXƒ‹پA2”N‘O‚حƒ|پ[ƒ‰ƒ“ƒhƒIƒ‹ƒVƒ…ƒeƒCƒ“پB‚»‚¤‚¢‚¦‚خپAƒjƒ…پ[ƒLƒƒƒbƒXƒ‹‚à‚؟‚ه‚¤‚اƒڈپ[ƒ‹ƒhƒJƒbƒv‚جچإ’†‚¾‚ء‚½پB
-------------------------------------
International Symposium on Geodesy for Earthquake and Natual Hazards, GENAH 2014, July 22-26, Matsushima, Miyagi, Japan
’nگk‚ئژ©‘RچذٹQ‚ج‚½‚ك‚ج‘ھ’nٹwچ‘چغƒVƒ“ƒ|ƒWƒEƒ€پBGNSS‚ة‚و‚é’nگk‚âژ©‘RچذٹQ‚جŒyŒ¸‚ئ‚¢‚¤‚ج‚àˆê‚آ‚ج‘ه‚«‚بƒeپ[ƒ}‚إپA”•\‚ج‚¨—U‚¢‚àژَ‚¯‚½‚ج‚¾‚¯‚اپA‚؟‚ه‚ء‚ئچ،”N‚حژٹش‚ھ‚ئ‚ê‚ب‚»‚¤‚إڈo‚¹‚ب‚©‚ء‚½پB‚ا‚¤‚à‚·‚¢‚ـ‚¹‚ٌپBٹJچأڈêڈٹ‚حڈ¼“‡‚جƒzƒeƒ‹‘هٹد‘‘پBƒvƒچƒOƒ‰ƒ€Œ©‚é‚ئ–ت”’‚»‚¤‚ب”•\‚ھ‘½‚¢‚ج‚إپAژٹش‚ھ‚ئ‚ê‚ê‚خچs‚«‚½‚¢‚ب‚ پB
-------------------------------------
‚½‚¢‚µ‚½کb‚إ‚ح‚ب‚¢‚ج‚¾‚¯‚اپArtklib 2.4.2 p5‚©‚çپAAbout Dialog‚إƒpƒbƒ`ƒŒƒxƒ‹‚ًٹm”F‚إ‚«‚é‚و‚¤‚ة‚µ‚ـ‚µ‚½پB
-------------------------------------
‚ئ‚¢‚¤‚±‚ئ‚إپA2/21‚ة‘إ‚؟ڈم‚°‚ç‚ꂽGPS IIF SVN64/PRN30‚ھ‚و‚¤‚₉^—pٹJژnپB2014/5/30 18:45 UTC‚©‚çپBگV‰qگ¯ڈA–ًژژèڈ‡ٹm—§‚ج‚½‚ك‚ج—ا‚¢ژژŒ±ƒPپ[ƒX‚ب‚ج‚إپAٹm”F‚ئ‘خ‰‚و‚낵‚پB
-------------------------------------
‰ًگح‚ج‚½‚ك‚ةˆêژ“I‚ة‘½—ت‚جŒvژZژ‘Œ¹‚ھ•K—v‚إپA‚»‚ꂶ‚لƒNƒ‰ƒEƒhژg‚ء‚ؤ‚ف‚و‚¤‚©‚ئژv‚ء‚ؤپAAmazon AWS‚ً’²‚ׂؤ‚ف‚½پBˆب‰؛ƒپƒ‚پB
(1) CPU‘ٍژRژg‚¤‰ًگح‚ب‚ج‚إEC2 C3‚ھ‘أ“–پB1ƒCƒ“ƒXƒ^ƒ“ƒX‚ ‚½‚èچإ‘ه32ƒRƒA+RAM
60GB+SSD 320GB‚ـ‚إژg‚¦‚é (c3.8xlarge)پBCPU‚حXeon
E5-2680v2 ‚ب‚ج‚إپA•¨—ƒRƒA‚ح1620ƒRƒA‚¾‚ھAVX‚ـ‚إ‚حژg‚¦‚éپB26,496ƒRƒAƒNƒ‰ƒXƒ^‚إ484.18TFLOPS‚ئوگ‚ء‚ؤ‚¢‚é‚¢‚é‚ھƒRƒA“–‚½‚è–ٌ18GFLOPS‚ب‚ج‚إ‚ ‚ـ‚èŒّ—¦‚ھڈo‚ؤ‚¢‚ب‚¢Œّ—¦‚ح90%‹ك‚ڈo‚ؤ‚¢‚éپB(6/1ڈCگ³) ƒXƒpƒRƒ“‚جڈêچ‡‚حچ‚‘¬ƒCƒ“ƒ^پ[ƒRƒlƒNƒg‚ھ”„‚è‚ب‚ج‚إپA‘½•ھ‚±‚±‚ھژم‚¢‚ج‚¾‚낤پB’تگM‚ھ•K—v‚ب‚¯‚ê‚خ•¨—CPUگ«”\‚ة‹ك‚¢گ«”\‚ھ‚إ‚邱‚ئ‚ًٹْ‘ز‚µ‚و‚¤پB
(2) —؟‹à‚حژg‚¢•û‚âƒٹپ[ƒWƒ‡ƒ“ (DCگف’uڈêڈٹ)
‚ة‚و‚ء‚ؤˆظ‚ب‚èپAƒIƒ“ƒfƒ}ƒ“ƒh+Linux+•ؤچ‘“Œ•”+c3.8xlarge‚إ—؟‹à‚ح$1.68/HپBکA‘±“I‚ةژg‚¤ڈêچ‡‚حپAƒٹƒUپ[ƒuƒh‚ة‚µ‚½•û‚ھٹ„ˆّ‚ة‚ب‚éپBگFپX‚ئƒIƒvƒVƒ‡ƒ“‚ھ‚ ‚é‚ھƒپƒjƒ…پ[‚ھ‘½‚·‚¬‚ؤ‰½‚ھچإ“K‚©ژہچغژg‚ء‚ؤ‚ف‚ب‚¢‚ئ—ا‚•ھ‚©‚ç‚ب‚¢پB
(3) ژg‚¦‚éOS‚حCentOS, Debian, SUSE, Amazon
Linux, Oracle Linux, Ubuntu, Red Hat, Windows
ServerپBOS‚ة‚و‚ء‚ؤ‚ح’ا‰ء—؟‹à‚ھ‚©‚©‚éپBƒZƒbƒgƒAƒbƒvچد‚ف‚جAMI
(Amazon machine image) ‚ًƒچپ[ƒh‚µ‚ؤ‘¦—ک—p‚إ‚«‚éپB
(4) ƒCƒ“ƒXƒ^ƒ“ƒXژہچsژ‚ة•غژ‚µ‚ؤ‚¢‚½ƒfپ[ƒ^‚ح’âژ~ژ‚ة”jٹü‚³‚ê‚é‚ج‚إپAƒfپ[ƒ^‚ً‰i‘±“I‚ة•غ‘¶‚·‚éڈêچ‡’ا‰ءƒXƒgƒŒپ[ƒW
(EBS) ‚ً—ک—p‚·‚é•K—v‚ھ‚ ‚éپB‚±‚ج—؟‹à‚àƒIƒvƒVƒ‡ƒ“‚إگFپX•د‚ي‚é‚ھ$0.05
/GB/ŒژپA$0.05/100–œIO ‚©‚çپB
(5) ‰ًگح‚ةژg‚¤ڈêچ‡پA(a) ‘€چى‚ج‚½‚ك‚ج’[––گع‘±پA(b)
“ü—حƒfپ[ƒ^ƒAƒbƒvƒچپ[ƒhپA(c) ‰ًگحŒ‹‰ت‰ٌژûپA‚ج‚½‚ك’تگM‚ھ•K—v‚ة‚ب‚é‚ھپAڈo—ح1GB/Œژ‚ـ‚إ‚ح–³—؟پA‚»‚êˆبڈم10TB/Œژ‚ـ‚إ‚ح$0.12/GBپB
‚ئ‚¢‚¤‚±‚ئ‚إپAˆê”شڈ¬‚³‚بƒCƒ“ƒXƒ^ƒ“ƒX‚ب‚ç–³—؟‚إژژ—p‚إ‚«‚»‚¤‚ب‚ج‚إ‚؟‚ه‚ء‚ئژg‚ء‚ؤ‚ف‚½پB
(1) چإڈ‰‚ةAWS‚جƒAƒJƒEƒ“ƒg‚ًچى‚éپB‚±‚±‚©‚çƒTƒCƒ“ƒCƒ“پB“r’†‚إ”Fڈط‚ج‚½‚ك‚ج“dکb”شچ†‚ً“ü—ح‚µ“dکb‚ھ‚©‚©‚ء‚ؤ‚‚é‚ج‚إپA“dکb‚©‚ç”Fڈط”شچ†‚ً“ü‚ê‚éپBŒg‘ر“dکb”شچ†‚إ‚à“ء‚ة–â‘è‚ب‚©‚ء‚½پB
(2) چى‚ء‚½ƒAƒJƒEƒ“ƒg‚إƒچƒOƒCƒ“پBAmazon Web Services‰و–ت‚إEC2‚ً‘I‚شپB
(3) EC2 Dashboard‚إ "Launch Instanse"
ƒ{ƒ^ƒ“‚ًƒNƒٹƒbƒNپB
(4) Step 1: Choose an Amazon Machine Image
(AMI) ‚إژg‚¤OSƒCƒپپ[ƒW‚ً‘I‚شپB‚±‚±‚إ‚ح–³—؟‚جUbuntu
Server 14.04 LTS (PV) - 64bit‚ً‘I‚شپB
(5) Step 2: Choose an Instance Type ‚إژg‚¤CPUƒCƒ“ƒXƒ^ƒ“ƒX‚ً‘I‚شپB‚±‚±‚إ‚ح–³—؟‚جMicro
instances (t1.micro) ‚ً‘I‚شپB"Review
and Launch"‚ًƒNƒٹƒbƒNپB
(6) Step 7: Review Instance Launch ‚إ“à—eٹm”FپBInstanse
Storage ‚ھEBS only‚ئ‚ب‚ء‚ؤ‚¢‚邯‚اپAˆêژƒXƒgƒŒپ[ƒW‚حژg‚¦‚é‚ج‚¾‚낤‚©پB"Launch"
‚ًƒNƒٹƒbƒNپB
(7) Select an exsiting key pair or create
a new key pairƒ_ƒCƒAƒچƒO‚إSSHگع‘±‚ج‚½‚ك‚جŒِٹJˆأچ†Œ®‚ًچى‚éپB"Create
a new key pair"‚ً‘I‚ٌ‚إ"Key pair
name"‚ً“ü—حپB‚±‚±‚إ‚ح–¼‘O‚ً"testtest"‚ئ‚·‚éپBtesttest.pem‚ج–¼‘O‚جƒtƒ@ƒCƒ‹‚ھƒ_ƒEƒ“ƒچپ[ƒh‚³‚ê‚éپB"Launch
Instances"‚ًƒNƒٹƒbƒNپB
(8) Launch Status‰و–ت‚ھڈo‚ؤ"your instance
is now launchig"‚ئڈo‚éپB
(9) ‹N“®‚µ‚½ƒCƒ“ƒXƒ^ƒ“ƒX‚جڈَ‘ش‚حEC2 Dashboard‚جƒپƒjƒ…پ[Instances‚إˆê——•\ژ¦‚³‚ê‚éپBگع‘±‚·‚éڈêچ‡‚حپAڈم•”ƒپƒjƒ…پ[Connect‚ًژہچs‚·‚é‚ئ"Connect
To Your Instance"ƒ_ƒCƒAƒچƒO‚ھڈo‚éپB‰و–ت‚جژwژ¦‚ةڈ]‚¢پASSHƒNƒ‰ƒCƒAƒ“ƒg‚ً‹N“®‚µ‚ؤگع‘±‚·‚éپBJAVA‚ة‚و‚éSSHƒNƒ‰ƒCƒAƒ“ƒg‚à‘I‘ً‚إ‚«‚éپB
(10) SSHƒNƒ‰ƒCƒAƒ“ƒg‚ئ‚µ‚ؤputty‚ًژg‚¤ڈêچ‡‚حپAputty‚جŒ®•دٹ·ƒ†پ[ƒeƒBƒٹƒeƒBputtygen‚إپA(7)‚إƒ_ƒEƒ“ƒچپ[ƒh‚µ‚½Œ®ƒtƒ@ƒCƒ‹‚ًputty—pppkƒtƒ@ƒCƒ‹‚ة•دٹ·‚·‚é•K—v‚ھ‚ ‚éپB•دٹ·ŒمپAputty‚جconnection
- SSH - Auth - private key file for authentication‚إppkƒtƒ@ƒCƒ‹‚ً‘I‘ً‚µپAƒAƒhƒŒƒXubuntu@xxx.xxx.xxx.xxx‚إSSHƒچƒOƒCƒ“‚·‚éپB
(11) –³—؟‚إژg‚¦‚éƒCƒ“ƒXƒ^ƒ“ƒX‚جOS, ƒfƒBƒXƒN,
CPU, ƒپƒ‚ƒٹ‚حˆب‰؛‚ج—l‚بٹ´‚¶پB
ubuntu@ip-172-31-xx-xxx:~$ pwd /home/ubuntu ubuntu@ip-172-31-xx-xxx:~$ uname -a Linux ip-172-31-xx-xxx 3.13.0-24-generic #46-Ubuntu SMP Thu Apr 10 19:11:08 UTC 2014 x86_64 x86_64 x86_64 GNU/Linux ubuntu@ip-172-31-xx-xxx:~$ df Filesystem 1K-blocks Used Available Use% Mounted on /dev/xvda1 8125880 777784 6912284 11% / none 4 0 4 0% /sys/fs/cgroup udev 290480 12 290468 1% /dev tmpfs 60280 184 60096 1% /run none 5120 0 5120 0% /run/lock none 301384 0 301384 0% /run/shm none 102400 0 102400 0% /run/user ubuntu@ip-172-31-xx-xxx:~$ cat /proc/cpuinfo processor : 0 vendor_id : GenuineIntel cpu family : 6 model : 45 model name : Intel(R) Xeon(R) CPU E5-2650 0 @ 2.00GHz stepping : 7 microcode : 0x70d cpu MHz : 1795.672 cache size : 20480 KB physical id : 1 siblings : 1 core id : 2 cpu cores : 1 apicid : 36 initial apicid : 36 fpu : yes fpu_exception : yes cpuid level : 13 wp : yes flags : fpu de tsc msr pae cx8 apic sep cmov pat clflush mmx fxsr sse sse2 ss ht syscall nx lm constant_tsc rep_good nopl nonstop_tsc pni pclmulqdq ssse3 cx16 pcid sse4_1 sse4_2 popcnt tsc_deadline_timer aes avx hypervisor lahf_lm bogomips : 3591.34 clflush size : 64 cache_alignment : 64 address sizes : 46 bits physical, 48 bits virtual power management: ubuntu@ip-172-31-xx-xxx:~$ cat /proc/meminfo MemTotal: 602768 kB MemFree: 402832 kB Buffers: 1000 kB Cached: 143864 kB SwapCached: 0 kB Active: 86204 kB Inactive: 73628 kB Active(anon): 15028 kB Inactive(anon): 172 kB Active(file): 71176 kB Inactive(file): 73456 kB ...
(12) ‚±‚جڈَ‘ش‚إژ©“®“I‚ةEBSڈم‚ة8GB‚‚ç‚¢ƒfƒBƒXƒN‚ھٹ„‚è“–‚ؤ‚ç‚ê‚ؤ‚¢‚é—l‚ب‚ج‚إپAƒtƒ@ƒCƒ‹‚ًƒAƒbƒvƒچپ[ƒh‚µ‚ؤ‚ف‚éپBƒAƒbƒvƒچپ[ƒh‚ة‚حWinSCP‚ًژg‚¤پBWinSCP‚إپAHost
name‚ةٹ„‚è“–‚ؤ‚ç‚ꂽIPƒAƒhƒŒƒXپAUser name‚ةubuntuپAAdvanced...
- SSH - Authentication - Private key file
‚إ (10) ‚إگ¶گ¬‚µ‚½ppkƒtƒ@ƒCƒ‹‚ًژw’èپB"login"
ƒ{ƒ^ƒ“‚ًƒNƒٹƒbƒN‚·‚é‚ئگع‘±‚إ‚«‚éپB
(13) WinSCP‚إ–^APƒpƒbƒPپ[ƒW180MBˆت‚ًƒAƒbƒvƒچپ[ƒhپB“]‘—‘¬“x‚ح1.9MB/sˆتڈo‚ؤ‚¢‚éپB
(14) –^APƒpƒbƒPپ[ƒW‚ًƒrƒ‹ƒh‚·‚邽‚ك‚ة‚ح‚¢‚‚آ‚©ƒpƒbƒPپ[ƒW‚ً’ا‰ء‚·‚é•K—v‚ھ‚ ‚éپBsudo
apt-get install‚إˆب‰؛ƒCƒ“ƒXƒgپ[ƒ‹پBmake,
gfortranپB
(15) MKL‚ًژg‚ء‚½چs—ٌŒvژZ‚ج’P‘جƒeƒXƒg‚ًژہچsپB5000پ~5000‚حƒپƒ‚ƒٹ‚ھژو‚ê‚ب‚‚ؤƒGƒ‰پ[ڈI—¹‚·‚éپB‚ـ‚ ƒtƒٹپ[ƒپƒ‚ƒٹ400MB‚µ‚©‚ب‚¢‚ج‚إژd•û‚ب‚¢پB
matmul() 200 x 200: time= 0.019 s ( 840.0 MFLOPS) matmul() 500 x 500: time= 0.053 s ( 4712.3 MFLOPS) matmul() 1000 x 1000: time= 0.431 s ( 4638.1 MFLOPS) matmul() 2000 x 2000: time= 3.517 s ( 4548.2 MFLOPS)
(16) –³—؟‚إژg‚¦‚éƒCƒ“ƒXƒ^ƒ“ƒX‚إ‚ح‚©‚ب‚è’x‚¢‚ھپA“®چى‚ح“ء‚ة–â‘è‚ب‚¢پB‚ ‚ئ’[––ƒŒƒXƒ|ƒ“ƒX‚ھ‚؟‚ه‚ء‚ئ’x‚¢ٹ´‚¶پBƒCƒ“ƒXƒ^ƒ“ƒX‚جƒXƒeپ[ƒ^ƒX‚إZone‚ًŒ©‚é‚ئ"us-west-2b"‚ئ‚ ‚é‚ج‚إپA•ؤچ‘ƒIƒŒƒSƒ“ڈB‚جDC‚炵‚¢پBVNC‚إگع‘±‚·‚é‚ج‚ح‚؟‚ه‚ء‚ئŒµ‚µ‚¢‚©‚àپBƒCƒ“ƒXƒ^ƒ“ƒX‚ة‚و‚ء‚ؤ‚ح“Œ‹‚جDC‚à‘I‚ׂé‚ھپA•ؤچ‘‚ة”نٹr‚µ‚ؤ—؟‹à‚ھڈ‚µچ‚‚¢پB
(17) EC2 Dashboard‚جElastic Block Store (EBS)
‚جsnapshotsƒپƒjƒ…پ[‚ًژg‚¤‚ئEBSƒfƒBƒXƒNƒCƒپپ[ƒW‚جƒXƒiƒbƒvƒVƒ‡ƒbƒg‚ھ‚ئ‚ê‚é‚炵‚¢پB‚½‚¾پA‚ا‚±‚©‚ç‰غ‹à‚³‚ê‚é‚ج‚©‚ھ—ا‚•ھ‚©‚ç‚ب‚¢پBAWS‚جƒAƒJƒEƒ“ƒgچى‚éژ‚ةƒNƒŒƒWƒbƒgƒJپ[ƒh”شچ†‚ً“ü‚ꂽ‚ج‚إپA’m‚ç‚ب‚¢ٹش‚ة‰غ‹à‚³‚ê‚é‰آ”\گ«‚ھ‚ ‚éپB‚à‚¤‚؟‚ه‚ء‚ئ—ا‚’²‚ׂؤ‚©‚炾‚بپB
(18) EC Management Console ڈم•”‚جƒAƒJƒEƒ“ƒg–¼‚ًƒNƒٹƒbƒN‚µ‚ؤ‘I‘ً‚إ‚«‚éƒپƒjƒ…پ[Billing
and Cost Management‚ًژہچs‚·‚é‚ئŒ»چف‚جŒژ–ˆ‰غ‹àڈî•ٌ‚ھٹm”F‚إ‚«‚éپB
Monthly Spend
$0.00
‚ئ‚¢‚¤‚±‚ئ‚إ‚ظ‚ء‚ئ‚µ‚½پB‰غ‹à”گ¶‚µ‚½‚çƒAƒ‰پ[ƒg‚ًƒپپ[ƒ‹‚µ‚ؤ‚‚ê‚é—l‚ةگف’è‚à‚إ‚«‚é–ح—lپB
(19) ‹N“®‚µ‚½ƒCƒ“ƒXƒ^ƒ“ƒX‚ً’âژ~‚·‚邽‚ك‚ة‚حپAEC2
Dashboard‚جInstancesƒپƒjƒ…پ[‚إ‹N“®’†‚جƒCƒ“ƒXƒ^ƒ“ƒX‚ًژw’肵‚ؤپAڈم•”ƒپƒjƒ…پ[
Actions - Stop ‚ًژہچs‚·‚éپBStop Instances
ƒ_ƒCƒAƒچƒO‚إ"Warning Please note that
any data on the ephmerial storage of your
instance will be lost when it is stopped"
‚ئŒxچگ‚ھڈo‚éپB"Yes, Stop" ‚ً‘I‚شپBڈ‚µŒo‚آ‚ئƒCƒ“ƒXƒ^ƒ“ƒX‚جƒXƒeپ[ƒ^ƒX‚ھ"stopped"‚ة•د‚ي‚éپB
(20) چؤ“x Actions - Start‚ًژہچs‚·‚é‚ئپAچؤ“xƒCƒ“ƒXƒ^ƒ“ƒX‚ھ‹N“®‚µ‚ؤSSHگع‘±‚إ‚«‚é‚و‚¤‚ة‚ب‚éپB‚ب‚¨’âژ~‚µ‚ؤ‚àEBSڈم‚جƒfƒBƒXƒNƒCƒپپ[ƒW‚حڈء‚³‚ê‚ب‚¢‚إژc‚ء‚ؤ‚¢‚é—l‚¾پBƒCƒ“ƒXƒ^ƒ“ƒXژ©‘ج‚ًٹ®‘S‚ةڈI—¹‚·‚邽‚ك‚ة‚ح
Actions - Terminate‚ًژہچs‚·‚éپB"Warning
On an EBS-backed instance, the default action
in for the root EBS volume to be deleted
when the instance in terminated. Storage
on any local drive will be lost" ‚ئŒxچگ‚ھڈo‚é‚ج‚إپAڈI—¹‚·‚é‚ئ‚»‚جƒCƒ“ƒXƒ^ƒ“ƒX‚ة•R•t‚¯‚³‚ꂽEBSƒXƒgƒŒپ[ƒW‚حڈء‚³‚ê‚ؤ‚µ‚ـ‚¤—l‚¾پB
‚ئ‚¢‚¤‚±‚ئ‚إAmazon EC2‚ً‚؟‚ه‚ء‚ئ‚¾‚¯ژg‚ء‚ؤ‚ف‚½پBژèŒy‚ة‰¼‘zٹآ‹«‚ًژg‚¦‚é‚ج‚ح—ا‚¢‚¯‚اپA—؟‹à‘جŒn‚ھ•،ژG‚إ‚ا‚ê‚‚ç‚¢ژg‚ء‚½‚ç‚ا‚ê‚‚ç‚¢‰غ‹à‚³‚ê‚é‚ج‚©‚ھ—ا‚•ھ‚©‚ç‚ب‚¢“_‚ھ•sˆہپB–{ٹi“I‚ةژg‚ء‚ؤ‚ف‚é‚©‚ح‚؟‚ه‚ء‚ئŒں“¢‚µ‚ؤ‚ف‚و‚¤پB
•â‘«: ‚ ‚ئٹ´‚¶‚½‚ج‚حAmazon‚ج‹Zڈp—ح•¨گ¦‚¢‚ب‚ پA‚ئ‚¢‚¤‚±‚ئپBگ¢ٹE’†‚ةڈ\‰½‚©ڈٹ‚©‚ ‚éDC‚إچ‡‚ي‚¹‚ؤگ”ڈ\–œپ`گ”•S–œ‘ن‹K–ح‚جƒTپ[ƒo‚ھ“®‚¢‚ؤ‚¢‚ؤپA’´‹گ‘ه‚إ•،ژG‚بƒVƒXƒeƒ€‚ًƒEƒFƒuƒCƒ“ƒ^پ[ƒtƒFپ[ƒX‚إƒ†پ[ƒU‚ھٹب’P‚ة‘€چى‚إ‚«‚é–َ‚إپBڈلٹQ‚âƒZƒLƒ…ƒٹƒeƒB‚ة‚آ‚¢‚ؤ‚à–œ‘S‚ج‘خچô‚ئ‚ء‚ؤ‚é‚ح‚¸‚إپA‘ٹ“–‚جƒmƒEƒnƒE‚ج’~گد‚ھ–³‚¢‚ئ–³—‚¾‚낤پB“ْ–{‚إ‚àپA‚³‚‚çƒCƒ“ƒ^پ[ƒlƒbƒg‚ب‚ٌ‚©‚حٹو’£‚ء‚ؤ‚¢‚é‚ئژv‚¤‚¯‚اپAAmazon‚ئ”نٹr‚·‚é‚ئٹا—ƒRƒ“ƒ\پ[ƒ‹‚ھ‚ب‚ٌ‚©‚µ‚ه‚ع‚¢‚©‚ç‚ب‚ پB(12:46’ا‹L)
چؤ•â‘«: EC2 C3 1ƒCƒ“ƒXƒ^ƒ“ƒX‚ئ‚ظ‚ع“¯“™‚جƒTپ[ƒo‚ً”ƒ‚¤‚ئچ،‚ب‚çٹT‚ث1ژ® \80–œ‚‚ç‚¢‚©پB3”N‚إڈ‹p‚·‚é‚ئ‚µ‚ؤ\800,000/3/365/24=\30.4/HپB“d‹C‘م\27/kwhˆت‚炵‚¢‚ج‚إپAƒTپ[ƒo“d—ح800w‚ئ‚µ‚ؤ“d‹C‘م‚ھ\21.6/HپA‚ ‚ي‚¹‚ؤ\52.0/HپB‚ ‚ئپAOS‚جƒZƒbƒgƒAƒbƒv‚ئ‚©پAƒoƒbƒNƒAƒbƒv‚ئ‚©پAڈلٹQژ‘خ‰‚ئ‚©‚جگlŒڈ”ïپB“Œ‹‚¾‚ئƒTپ[ƒo‚جگف’uƒRƒXƒg‚à–³ژ‹‚إ‚«‚ب‚¢پBˆبڈم‚ًچl‚¦‚ؤ‚àپA‚ـ‚¾•½‹د“I‚ة‚حƒNƒ‰ƒEƒh‚و‚èƒTپ[ƒo”ƒ‚ء‚½•û‚ھˆہ‚¢‚¾‚낤پB‚½‚¾پA‰ًگح‚جڈêچ‡‚ة‚ح•K—v‚بژ‚ة‚ح—L‚邾‚¯ŒvژZژ‘Œ¹‚ھ—~‚µ‚¢‚¯‚اپA‚»‚êˆبٹO‚جژ‚ح–w‚ا‰ز“‚µ‚ؤ‚¢‚ب‚¢–َ‚إپAƒNƒ‰ƒEƒh‚جƒXƒPپ[ƒ‰ƒrƒٹƒeƒB‚ة‰؟’l‚ھ‚ ‚éپBڈT––ƒrƒ‹‚ج’â“d‚إ‹Mڈd‚ب‰ًگحژٹش‚ھژg‚¦‚ب‚¢‚ب‚ٌ‚ؤ‚±‚ئ‚à‚ب‚¢‚µپB(18:45’ا‹L)
...................................................................................................................................
’p‚¸‚©‚µ‚ب‚ھ‚çپA‚ـ‚½’v–½“I‚بƒoƒO‚ھŒ©‚آ‚©‚ء‚½‚ج‚إپArtklib_2.4.2_p7‚ًƒٹƒٹپ[ƒXپBڈلٹQ‚ئ‚µ‚ؤ‚حRINEX 2 ٹد‘ھƒfپ[ƒ^‚ج“ا‚فچ‚فژ‚ةƒپƒ‚ƒٹƒAƒNƒZƒX—لٹO‚إ—ژ‚؟‚é‚à‚جپBŒ´ˆِ‚حٹد‘ھƒ^ƒCƒvƒeپ[ƒuƒ‹‚ً’ا‰ء‚µ‚½چغ‚ةٹشˆل‚¦‚ؤڈI’[‚ج‹َ•¶ژڑ—ٌ‚ًچيڈœ‚µ‚ؤ‚µ‚ـ‚ء‚½’Pڈƒƒ~ƒXپBRINEX 3‚إ‚ح”گ¶‚µ‚ب‚¢‚ح‚¸پBˆêڈڈ‚ة3ژü”gپ~(GPS+GLO+BDS) ‚جٹîگü‰ًگح‚إ—ژ‚؟‚éƒoƒO‚àڈCگ³پB
RTKLIBƒ†پ[ƒU‚جٹF—lپAگFپX‚ئ‚²–ہکf‚ً‚©‚¯‚ؤگ\‚µ–َ‚ ‚è‚ـ‚¹‚ٌپB
-------------------------------------
—ا‚¢‹@‰ï‚ب‚ج‚إپAچً“ْ‚ج‘±‚«‚إ‚à‚¤ڈ‚µچׂ©‚¢ƒ`ƒ…پ[ƒjƒ“ƒO‚ً‚µ‚ؤ‚ف‚و‚¤پB
Silip Thres (m) ‚جگف’èپB‚±‚ê‚حgeometry-freeگüŒ`Œ‹چ‡‚ة‚و‚éƒTƒCƒNƒ‹ƒXƒٹƒbƒv”»’è‚ج臒lپB
| 0.050 | 0.040 | 0.030 | 0.025 | 0.020 | 0.015 | 0.010 |
| 18269 (89.6%) |
18229 (89.4%) |
18234 (89.4%) |
18234 (89.4%) |
19008 (93.2%) |
18273 (89.6%) |
18275 (89.6%) |
| 0.022 | 0.021 | 0.020 | 0.019 | 0.018 |
| 19006 (93.2%) |
19008 (93.2%) |
19008 (93.2%) |
19004 (93.2%) |
18214 (89.3%) |
Outage to Reset Amb‚جگف’èپB‚±‚ê‚حƒfپ[ƒ^کA‘±Œ‡—ژژ‚ةƒAƒ“ƒrƒMƒ…ƒCƒeƒB‚ًƒٹƒZƒbƒg‚·‚éƒGƒ|ƒbƒNگ”پB
| 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 18799 (92.1%) |
18227 (89.6%) |
18996 (93.1%) |
19008 (93.2%) |
18233 (89.4%) |
18985 (93.1%) |
18992 (93.1%) |
19037 (93.3%) |
19109 (93.7%) |
18927 (92.8%) |
18994 (93.1%) |
Min Lock to Fix Amb‚جگف’èپB‚±‚ê‚ح‰ً‚ھ“¾‚ç‚ê‚ؤ‚©‚çƒAƒ“ƒrƒMƒ…ƒCƒeƒB‚ًfix‚·‚é‚ـ‚إ‚جƒGƒ|ƒbƒNگ”پB
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 19109 (93.7%) |
18806 (92.2%) |
18963 (93.0%) |
18961 (92.9%) |
19101 (93.6%) |
19102 (93.6%) |
18968 (93.0%) |
18965 (93.0%) |
Min Fix to Hold Amb‚جگف’èپB‚±‚ê‚حF&Hƒ‚پ[ƒh‚إƒAƒ“ƒrƒMƒ…ƒCƒeƒB‚ًhold‚·‚é‚ـ‚إ‚جƒGƒ|ƒbƒNگ”پB
| 0 | 1 | 2 | 3 | 4 | 5 |
| 19145 (93.8%) |
19145 (93.8%) |
19119 (93.7%) |
19071 (93.5%) |
19072 (93.5%) |
19109 (93.7%) |
Reject Threshold of GDOP‚جگف’èپB‚±‚ê‚ح’P“ئ‰ً‚ًٹü‹p‚·‚éڈêچ‡‚جGDOP臒lپB
| 10 | 20 | 30 | 40 | 50 |
| 18937 (92.8%) |
19167 (94.0%) |
19145 (93.8%) |
19145 (93.8%) |
19145 (93.8%) |
Reject Threshold of Innovation (m) ‚جگف’èپB‚±‚ê‚حƒtƒBƒ‹ƒ^‚جpre-fitژcچ·‚ة‚و‚éƒfپ[ƒ^ٹü‹p臒lپB
| 0.0 | 5.0 | 10.0 | 15.0 | 20.0 | 25.0 | 30.0 | 35.0 | 40.0 | 45.0 |
| 19022 (93.2%) |
15757 (77.2%) |
17742 (87.0%) |
16157 (79.2%) |
15513 (76.0%) |
16251 (79.7%) |
19167 (94.0%) |
19266 (94.4%) |
19266 (94.4%) |
19197 (94.1%) |
ˆبڈم‚جچإ“K’l‚إپARec Dynamics ON/OFF‚جگف’èپB
| Rec Dynamics OFF | Rec Dynamics ON |
| 19266 (94.4%) |
19414 (95.2%) |
Process Noise - Receiver Accel Vertical (m/s2/sqrt(s)) ‚جگف’èپBژہچs‚ة‚ئ‚ؤ‚àژٹش‚ھ‚©‚©‚é‚ج‚إچإŒم‚ةپB
| 3.00E-01 | 1.00E+00 | 3.00E+00 | 1.00E+01 |
| 19289 (94.5%) |
19414 (95.2%) |
19408 (95.5%) |
19394 (95.5%) |
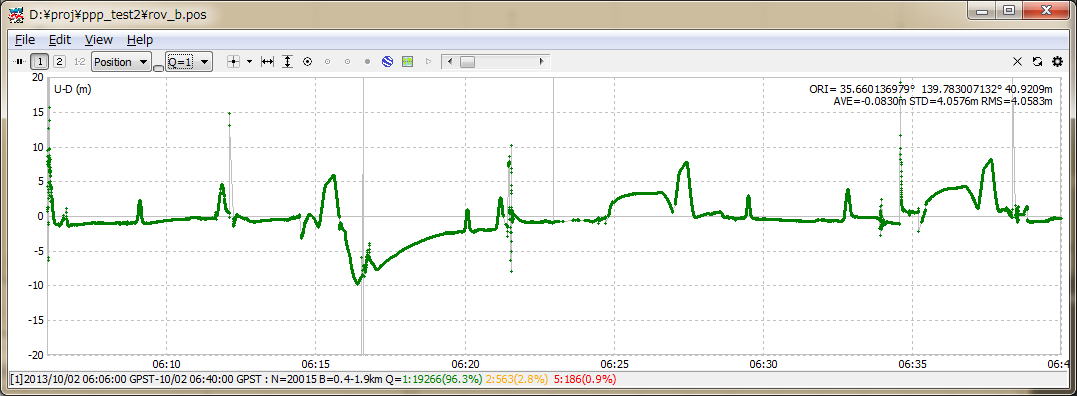
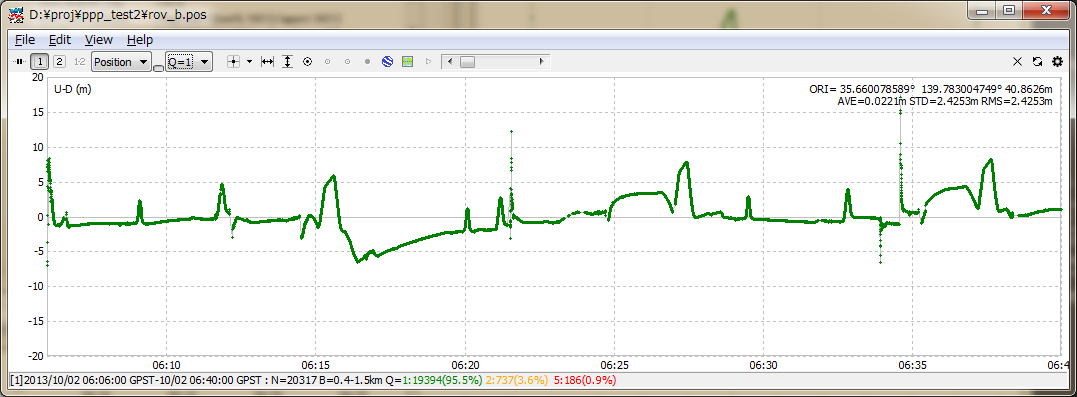
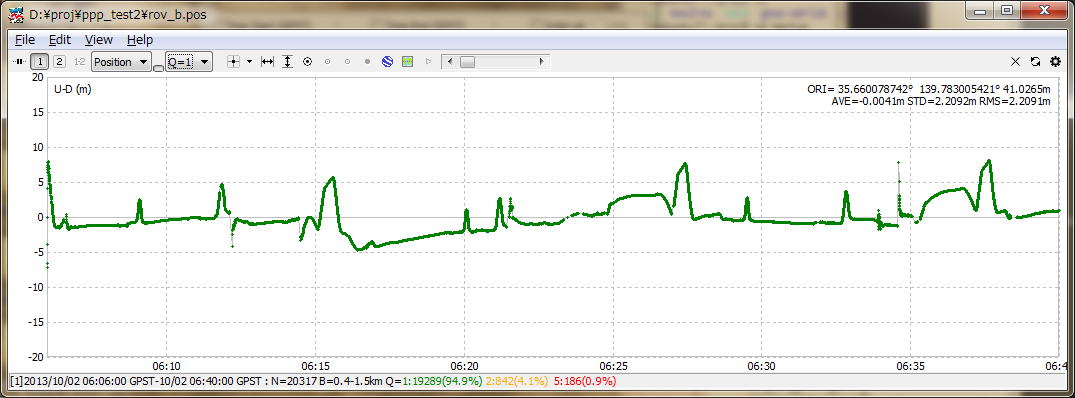
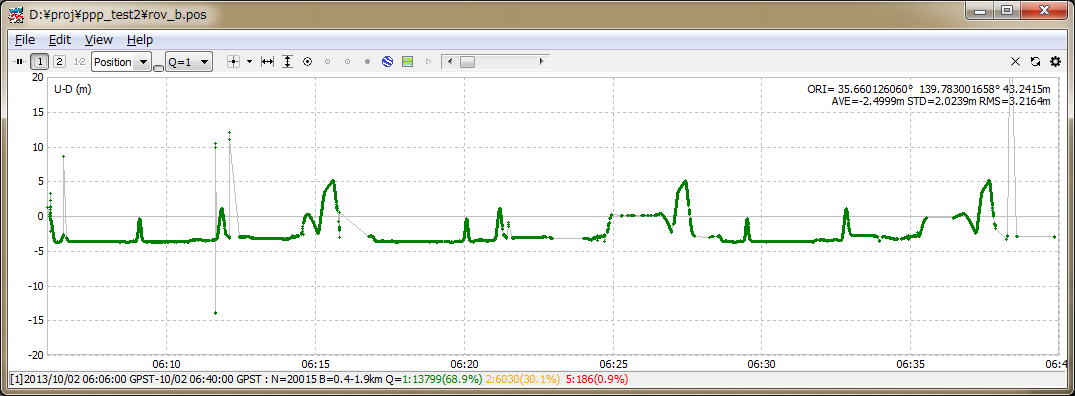
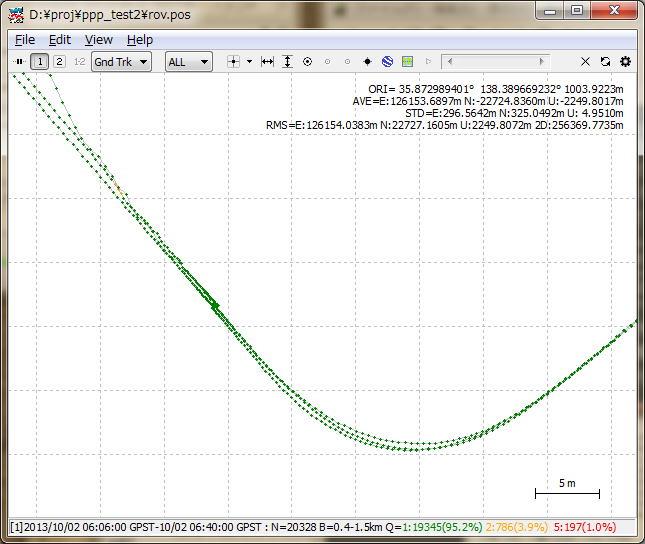
Rec Dynamics ON‚جŒّ‰تپBU-D‰ًپBڈم‚©‚çOFF, ON (process noise=1پ~101), ON (process noise=3پ~10-1)پBON‚ة‚·‚邱‚ئ‚ة‚و‚è06:17,0:38•t‹ك‚جƒ~ƒXƒtƒBƒbƒNƒX‚ھ‰ü‘P‚³‚ê‚ؤ‚¢‚é‚ھ06:17•t‹ك‚ج‰ً‚ًŒ©‚é‚ئ‰كڈè‚بƒtƒBƒ‹ƒ^‚ھ‚©‚©‚ء‚ؤ‚µ‚ـ‚ء‚ؤ‚¢‚éپB‚ـ‚½پAON‚ة‚µ‚ؤ‚à06:12, 06:22, 06:34‚ ‚½‚è‚جƒ~ƒXƒtƒBƒbƒNƒX‚ھژو‚ê‚ؤ‚¢‚ب‚¢پB‚ـ‚½پA‚±‚±‚إ‚حƒ~ƒXƒtƒBƒbƒNƒX‚ة‚و‚éŒëچ·‚ھچإ‘ه10m‚ً’´‚¦‚ؤ‚¢‚éپBگ…•½‚إ‚à5m‚ح‚¸‚ê‚ؤ‚¢‚邾‚낤پB“sژs•”‚إ‚حژg‚¦‚é‰qگ¯‚ً‘S•”ژg‚ء‚½RTK‚إ‚à‚±‚ج•س‚ھŒہٹE‚ئ‚¢‚¤ٹ´‚¶پB‚±‚êˆبڈم‚حINS“چ‡‚ھ•K—v‚¾‚낤پB
•â‘«: ‚±‚ꓯ‚¶“¹کH‚ً3ژü‚µ‚ؤ‚¢‚é‚ج‚إ06:17-06:22‚ج‰ً‚ح–¾‚ç‚©‚ةˆظڈيپB‚ئ‚¢‚¤‚±‚ئ‚إپAInstantaneous ARپAGLONASS AR ON, Min Elevation to Fix Amb = 0‚ج‰ًپBRec Dynamics OFFپB
‚¤پ[‚ٌپB‚â‚ء‚د‚èپAˆع“®‘ج‚جڈêچ‡پAInstantaneous
AR‚ة‚µ‚ب‚¢‚ئƒ~ƒXƒtƒBƒbƒNƒX‚جƒyƒiƒ‹ƒeƒB‚ھ‘ه‚«‚·‚¬‚ؤƒ_ƒپ‚©‚àپB
CPUƒپپ[ƒ^Œ©‚ؤ‚½‚çMKL”إ‚إ‚àCPUژg—p—¦‚ھ25%‚ـ‚إ‚µ‚©ڈم‚ھ‚ء‚ؤ‚¢‚ب‚¢پB’²‚ׂé‚ئƒVƒXƒeƒ€ٹآ‹«•دگ”‚ة‚¢‚آ‚ج‚ـ‚ة‚©MKL_SERIAL
= YES‚ب‚ٌ‚ؤگف’è‚ھپB‚®‚®‚é‚ئMKL BLAS‚جƒ}ƒ‹ƒ`ƒXƒŒƒfƒBƒ“ƒO‚ًOFF‚·‚éگف’è‚炵‚¢پB‚±‚êNO‚ة‚µ‚ب‚¢‚ئƒ_ƒپ‚¾‚بپB
(8:00’ا‹L)
ƒVƒXƒeƒ€ٹآ‹«•دگ”‚جMKL_SERIAL = YES‚ًچيڈœ‚µ‚½‚çپACPU•‰‰×‚ھ99%‚ـ‚إڈم‚ھ‚é‚و‚¤‚ة‚ب‚ء‚ؤژہچsژٹش‚àژلٹ±‘¬‚‚ب‚ء‚½پB
(8:52’ا‹L)
...................................................................................................................................
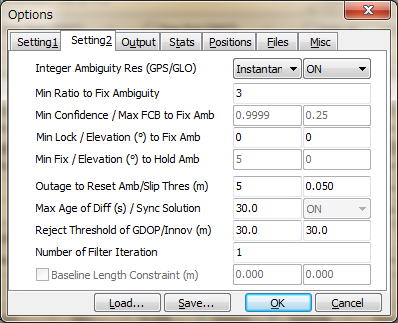
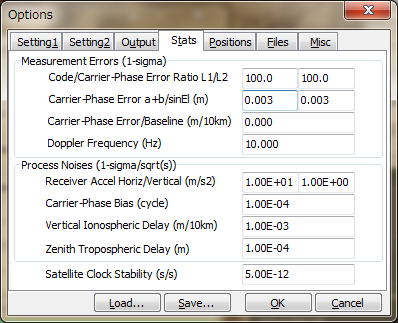
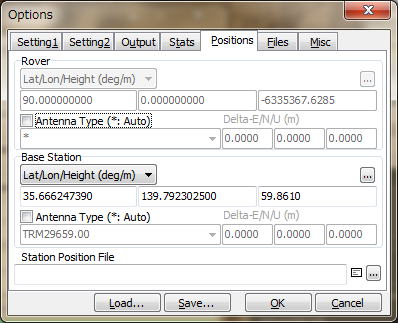
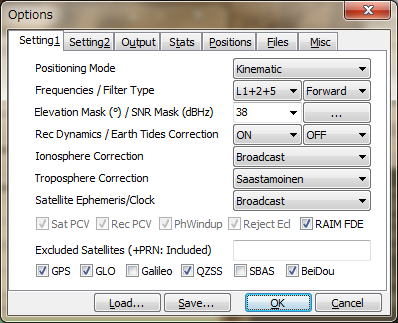
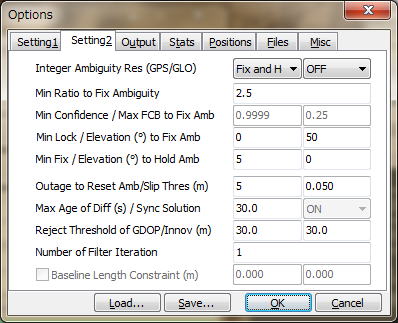
‚±‚جƒeƒXƒgƒfپ[ƒ^‚حˆع“®‘ج‚ة‚¨‚¯‚éƒ}ƒ‹ƒ`GNSS-RTK‚ج‚ئ‚ؤ‚à—ا‚¢—ل‘è‚ب‚ج‚إچإگV”إ‚جRTKPOST‚ًژg‚ء‚ؤ‰ًگح‚µ‚ؤ‚ف‚و‚¤پBƒpƒ‰ƒپپ[ƒ^گف’è‚إŒ‹‰ت‚ھ‚ا‚¤•د‚ي‚é‚©‚à‹»–،گ[‚¢‰غ‘è‚ب‚ج‚إ—ل‚àŒ“‚ث‚ؤƒ`ƒ…پ[ƒjƒ“ƒO‚µ‚ؤ‚ف‚éپB‚ـ‚¸ڈ‰ٹْگف’è‚حˆب‰؛‚ج’ت‚èپB
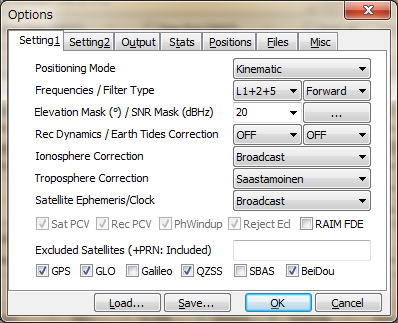
RTKPOST‚حrtklib_2.4.2_p7‚إ3ژü”g (Frequencies=L1+2+5)پBp6‚إ‚ح‰؛‚إڈ‘‚¢‚½‚ئ‚¨‚è2ژü”g (Frequencies=L1+2) ‚ـ‚إ‚µ‚©گ³ڈي‚ة“®چى‚µ‚ب‚¢پB‚ـ‚¸‚ح‰ًگحژٹش‚ج‘ھ’èپB(Core i7 2600KپA4ƒRƒA 4ƒXƒŒƒbƒh)
| RTKPOST | RTKPOST_MKL |
| 271.4 s | 65.1 s |
‚ئ‚¢‚¤‚±‚ئ‚إپA’تڈي”إ‚حƒVƒ“ƒOƒ‹ƒXƒŒƒbƒh‚إ‚µ‚©“®‚©‚ب‚¢‚ج‚إپAƒpƒ‰ƒپپ[ƒ^ƒ`ƒ…پ[ƒjƒ“ƒO‚ة‚حMKL”إ‚ًژg‚ي‚ب‚¢‚ئ‚ئ‚ؤ‚àƒXƒgƒŒƒX‚ھ‚½‚ـ‚éپB
‚³‚ؤپAˆع“®‘جRTK‚إچإ‚àگ«”\‚ةŒّ‚‚ج‚ح’تڈي‹آٹpƒ}ƒXƒN (Elevation Mask) ‚ب‚ج‚إپA‚ـ‚¸‚±‚ê‚ً5“xچڈ‚ف‚ة•د‚¦‚ؤFix—¦‚ً•]‰؟‚·‚éپB‚ب‚¨پARTKPLOT‚جƒXƒeپ[ƒ^ƒXƒoپ[‚ة•\ژ¦‚³‚ê‚éƒpپ[ƒZƒ“ƒg‚ح•êگ”‚ة‰ً‚ج“¾‚ç‚ê‚ب‚¢ƒGƒ|ƒbƒN‚ھٹـ‚ـ‚ê‚ؤ‚¢‚ب‚¢‚ج‚إپA•]‰؟—p‚ةژg‚¤‚ج‚ح‘أ“–‚إ‚ب‚¢پBˆب‰؛پA•\‚حFix‰ًگ” (Fix—¦) ‚ً•\‚µپAFix—¦ = Fix‰ًگ”/‘SƒGƒ|ƒbƒNگ” (20401) ‚إ’è‹`‚·‚éپB
| 15 deg | 20 deg | 25 deg | 30 deg | 35 deg | 40 deg | 45 deg |
| 10596 (51.9%) |
10754 (52.7%) |
11083 (54.3%) |
11776 (57.7%) |
12230 (60.0%) |
12662 (62.1%) |
10342 (50.7%) |
35“x‚ئ40“x‚جٹش‚ةچإ“K“_‚ھ‚ ‚è‚»‚¤‚ب‚ج‚إپAژں‚ة1“xچڈ‚فپB
| 35 deg | 36 deg | 37 deg | 38 deg | 39 deg | 40 deg |
| 12230 (60.0%) |
12721 (62.4%) |
12909 (63.3%) |
13189 (64.7%) |
12628 (61.9%) |
12662 (62.1%) |
‹آٹpƒ}ƒXƒN‚ح38“x‚ةŒإ’èپBژں‚ةARƒ‚پ[ƒh (Integer Ambiguity Res (GPS/GLO)) ‚جگف’èپB
| Cont/ON | Cont/OFF | Instant/ON | Instant/OFF | F&H/ON | F&H/OFF |
| 2439 (12.0%) |
8844 (43.4%) |
13189 (64.7%) |
11816 (57.9%) |
12317 (60.4%) |
13993 (68.6%) |
F&H (Fix and Hold) ƒ‚پ[ƒh‚ح‚à‚ئ‚à‚ئ‚حˆع“®‘ج‚جFix—¦Œüڈم‚ج‚½‚ك2.4.0‚إ’ا‰ء‚µ‚½‚à‚جپB‚½‚¾پAGLONASS“ü‚ê‚é‚ئˆ«‚‚ب‚é‚ج‚حGLONASS‚جگMچ†•iژ؟‚ھˆ«‚¢‚ج‚©پBF&H/OFF‚إŒإ’èپBژں‚ةپAARƒ}ƒXƒNٹp (Min Elev to Fix Amb) ‚جگف’èپB
| 0 deg | 40 deg | 45 deg | 50 deg | 55 deg | 60 deg |
| 13993 (68.6%) |
12181 (59.7%) |
14678 (72.0%) |
17660 (86.6%) |
16995 (83.3%) |
16995 (83.3%) |
45“x‚ئ55“x‚ئ‚جٹش‚ةچإ“K“_‚ھ‚ ‚è‚»‚¤‚ب‚ج‚إپAژں‚ة1“xچڈ‚فپB
| 45 deg | 46 deg | 47 deg | 48 deg | 49 deg | 50 deg | 51 deg | 52 deg | 53 deg | 54 deg | 55 deg |
| 14678 (72.0%) |
15204 (74.5%) |
15226 (74.6%) |
17192 (84.3%) |
16575 (81.3%) |
17660 (86.6%) |
17088 (83.8%) |
17024 (83.5%) |
16973 (83.2%) |
16995 (83.3%) |
16995 (83.3%) |
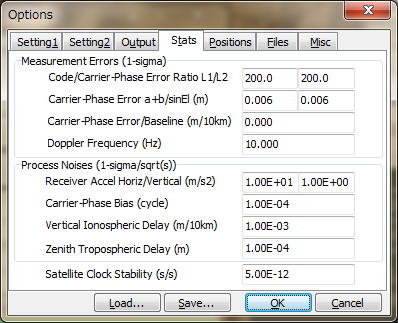
چ·‚ة•qٹ´‚إŒ‹‰ت‚ھ‚خ‚ç‚آ‚‚ھپA50“x‚ةŒإ’èپBژں‚ةژG‰¹ƒpƒ‰ƒپپ[ƒ^‚ج’²گ®پBCode/Carrier-Phase Error Ratio L1/L2‚جگف’èپB
| 100/100 | 120/120 | 140/140 | 160/160 | 180/180 | 200/200 | 220/220 | 240/240 | 260/260 | 280/280 | 300/300 |
| 17660 (86.6%) |
17693 (86.6%) |
17677 (86.6%) |
17687 (86.7%) |
17691 (86.7%) |
17699 (86.8%) |
17696 (86.7%) |
17693 (86.7%) |
17695 (86.7%) |
17686 (86.7%) |
17680 (86.7%) |
‚ ‚ـ‚èچ·‚ھڈo‚ب‚¢‚ھ200/200‚ةŒإ’èپBژں‚ةCarrier-phase Error a+b/sinEl (m)پB
| 0.002/0.002 | 0.003/0.003 | 0.004/0.004 | 0.005/0.005 | 0.006/0.006 | 0.007/0.007 | 0.008/0.008 |
| 17681 (86.7%) |
17699 (86.8%) |
17701 (86.8%) |
17708 (86.8%) |
17715 (86.8%) |
17606 (86.3%) |
17600 (86.3%) |
0.006/0.006‚ةŒإ’èپBژں‚ةRAIM FDE‚جON/OFFپBRAIM‚ح’¼گع‚حٹîگü‰ً‚ةٹضŒW‚ب‚¢‚ھ’P“ئ‰ً‚ھ‹پ‚ـ‚ç‚ب‚¢‚ئٹîگü‰ً‚ً‹پ‚ك‚ةچs‚©‚ب‚¢‚ج‚إپAچإڈI“I‚بFix—¦‚ة‰e‹؟‚ھ‚ ‚éپB
| RAIM FDE OFF | RAIM FDE ON |
| 17715 (86.8%) |
18257 (89.5%) |
RAIM FDE‚حON‚ةŒإ’èپBژں‚ةRatio Test‚جƒXƒŒƒbƒVƒ‡ƒ‹ƒh (Min Ratio to Fix Ambiguity)پB‚±‚ê‚حƒ~ƒXƒtƒBƒbƒNƒX—¦‚ئ‚جƒgƒŒپ[ƒhƒIƒt‚ب‚ج‚إپAچإ“K’l‚ح”÷–‚¾‚ھŒ‹‰ت‚ً“\‚ء‚ؤ‚¨‚پB‚ب‚¨پA‚±‚ج’l‚حŒoŒ±“I‚ة‚ح2-5‚ھژg‚ي‚ê‚éپBRTKLIB‚جƒfƒtƒHƒ‹ƒg‚ح3‚إ‚ ‚éپB
| 1 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 | 4.5 | 5 |
| 19670 (96.4%) |
19237 (94.3%) |
18304 (89.7%) |
18269 (89.6%) |
18257 (89.5%) |
18117 (88.8%) |
18083 (88.6%) |
18029 (88.4%) |
17998 (88.2%) |
5‚إ‚àƒ~ƒXƒtƒBƒbƒNƒX‚ح–³‚‚ب‚ç‚ب‚¢پB2.5‚ئ3‚جƒ~ƒXƒtƒBƒbƒNƒX—¦‚ح–w‚ا•د‚ي‚ç‚ب‚¢—l‚ةŒ©‚¦‚é‚ج‚إپA2.5‚ةŒإ’èپBژں‚ةRec Dynamics‚جON/OFFپB‚±‚êڈٹˆàDR (dead reckoning) ‚ً“ü‚ê‚郂پ[ƒh‚إپA‚©‚آ‰ء‘¬“x‚ة0چS‘©‚ھ‚©‚©‚éپBچS‘©ڈًŒڈ‚حProcess Noise - Receiver Accel Horiz/Vertical‚إژw’è‚·‚éپB‚±‚ج’l‚ح‚ئ‚è‚ ‚¦‚¸ƒfƒtƒHƒ‹ƒgپB
| Rec Dynamics OFF | Rec Dynamics ON |
| 18269 (89.6%) |
19345 (94.8%) |
‚±‚جƒIƒvƒVƒ‡ƒ“ژ©“®ژش“™‚إ‚ح‚»‚ê‚ب‚è‚ة—LŒّ‚إ‚ح‚ ‚é‚ھپAŒ»ژہ‘•‚إ‚ح‚·‚²‚ژہچsژٹش‚ھ‚©‚©‚é‚ج‚إپA—ک—p‚ح‚ ‚ـ‚肨ٹ©‚ك‚µ‚ب‚¢پBˆبڈم‚جچإ“Kگف’肨‚و‚ر‘ھˆت‰ً‚ًˆب‰؛‚ةژ¦‚·پBpartial fixing‚إGLONASS‚¨‚و‚ر50“xˆب‰؛‚ج‰qگ¯‚حƒAƒ“ƒrƒMƒ…ƒBƒeƒB‰ً‚¢‚ؤ‚¢‚ب‚¢‚ج‚إcm‹‰‚جگ¸“x‚ھڈo‚ؤ‚¢‚é‚©‚ح‹^–₾‚ھپA‚ـ‚ 10 cm‹‰‚حڈo‚ؤ‚¢‚é‚ج‚إ‚ح‚ب‚¢‚©پB‚½‚¾ƒ~ƒXƒtƒBƒbƒNƒX‰ً‚ة‚آ‚¢‚ؤ‚حڈ\•ھ‚ةگ¸چ¸‚ج•K—v‚ھ‚ ‚éپB
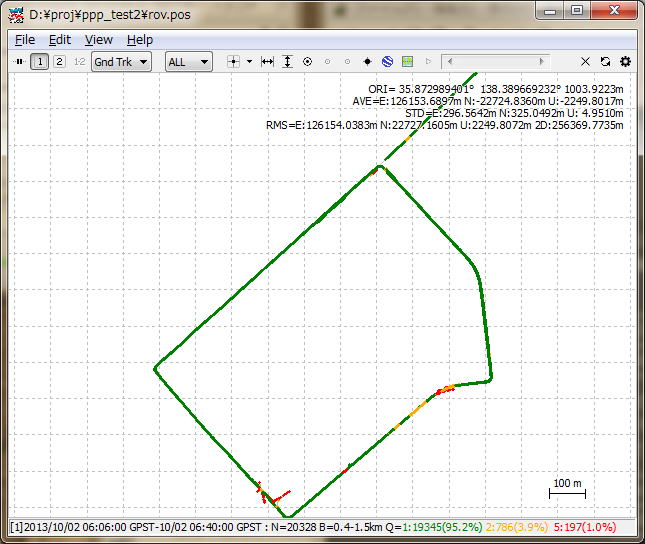
ˆبڈمپARTKPOST‚جگف’è‚ًژè“®ƒ`ƒ…پ[ƒjƒ“ƒO‚·‚é—ل‚ًژ¦‚µ‚½پBٹîگü‰ً‚جڈêچ‡پAFix—¦‚ح•iژ؟ژw•W‚ئ‚µ‚ؤ‚ح‚»‚ê‚ب‚è‚ة—LŒّ‚ب‚ج‚إ (‚ئ‚¢‚¤‚©ˆع“®‘ج‚جڈêچ‡پAچ‚گ¸“x‚جٹîڈ€‹Oگص‚ً‹پ‚ك‚é‚ج‚ح‚ئ‚ؤ‚à‘ه•د‚ب‚ج‚إپA‘¼‚ةژg‚¦‚éژw•W‚ھ‚ ‚ـ‚è‚ب‚¢) Fix—¦‚ً•]‰؟ٹضگ”‚ة‚µ‚ؤپAژہٹد‘ھƒfپ[ƒ^‚ً‘ه—ت‚ة“ü—ح‚µ‚ؤپAƒpƒ‰ƒپپ[ƒ^‚ًژ©“®ƒ`ƒ…پ[ƒjƒ“ƒO‚³‚¹‚é‚ئ‚¢‚¤‚ج‚حٹ„‚ئ—LŒّ‚©‚àپB‚±‚ꋳژt‚ ‚è‹@ٹBٹwڈK‚ج‰—p–â‘è‚ئ‚µ‚ؤŒ¤‹†‰؟’l‚ھ‚ ‚é‚©‚à‚µ‚ê‚ب‚¢پB‚±‚êٹwگ¶‚³‚ٌ’N‚©‚â‚è‚ـ‚¹‚ٌپB
-------------------------------------
‚ـ‚½پArtklib_2.4.2_p6‚ةƒoƒOŒ©‚آ‚¯‚ؤ‚µ‚ـ‚ء‚½...پB(GPS+GLO+BDS)پ~3ژü”g ‚ئ‚©(GPS+GLO+GAL+BDS)پ~2ژü”g‚جٹîگü‰ًگح‚إƒپƒ‚ƒٹƒAƒNƒZƒX—لٹO‚إ—ژ‚؟‚ـ‚·پB(GPS+GLO+BDS)پ~2ژü”g‚إ‚ح–â‘è‹N‚«‚ـ‚¹‚ٌپB”z—ٌƒTƒCƒY‘‚â‚·‚ج–Y‚ꂽ’PڈƒƒoƒOپB•،ژG‚ب‰ًگح‚·‚éگl‚ح‘½•ھژ©•ھ‚إŒ©‚آ‚¯‚ç‚ê‚é‚ح‚¸‚ب‚ج‚إپAژں‚جƒpƒbƒ`‚ـ‚إ‚حژ©—ح‚إ’¼‚µ‚ؤژg‚ء‚ؤ‚‚¾‚³‚¢پB
-------------------------------------
‚ئ‚¢‚¤‚±‚ئ‚إپArtklib_2.4.2_p6‚ًƒٹƒٹپ[ƒXپBŒ´ˆِ‚حGPS‚ھ”²‚¯‚é‚ئگ³‹K•û’ِژ®‚ھƒ‰ƒ“ƒN—ژ‚؟‚µ‚ؤچإڈ¬“ٌڈو‚ھ‰ً‚¯‚ب‚¢–â‘èپBGPS‚ھ”²‚¯‚½ڈêچ‡ژَگM‹@ƒNƒچƒbƒNƒoƒCƒAƒX‚ة0چS‘©‚ً‚©‚¯‚é—l‚ةڈCگ³پB‚ب‚¨rtklib_2.4.2_p6‚ة‚حp5‚ج•دچX‚ً‘S‚ؤژو‚èچ‚ٌ‚¾‚ج‚إp6“K—p‘O‚ةp5‚ً“K—p‚·‚é•K—v‚ح‚ ‚è‚ـ‚¹‚ٌپB
•â‘«: RTKPOST“à•”‚إگ„’肵‚½ژَگM‹@ƒNƒچƒbƒNƒoƒCƒAƒXپAGLO-GPSژŒnچ·پAGAL-GPSژŒnچ·پABDS-GPSژŒnچ·‚حoptions
- output - output solution status ‚ًstate‚ةگف’è‚·‚é‚ئپAsolution
statusƒtƒ@ƒCƒ‹‚ةCSVŒ`ژ®‚إڈo—ح‚³‚ê‚ـ‚·پBٹY“–ƒŒƒRپ[ƒh‚حˆب‰؛‚ج—l‚بŒ`ژ®‚إپA
$CLK,1786,601132.000,5,1,34.919,-405.886,-23.200,21.652
‘و2ƒtƒBپ[ƒ‹ƒh‚©‚çGPSڈT, TOW (s), Qƒtƒ‰ƒO, ژَگM‹@ژ¯•ت (1:rover,2:base), ژَگM‹@ƒNƒچƒbƒNƒoƒCƒAƒX (GPSTٹîڈ€) (ns), GLO-GPSژŒnچ· (ns), GAL-GPSژŒnچ· (ns), BDS-GPSژŒnچ· (ns) ‚ً•\‚µ‚ـ‚·پBŒµ–§‚ةŒ¾‚¦‚خپAژŒnچ·‚حژَگM‹@‹^ژ—‹——£ISB (inter system bias) ‚ًچ‡‚ي‚¹‚½’l‚إ‚·پB‚±‚ج’l‚ً‹پ‚ك‚½چغ‚جRINEX NAV (3.02) ‚جƒwƒbƒ_‚ًŒ©‚é‚ئپAUTC-BDT‚ھ+5.6 nsپAUTC-GALT‚ھ-1.9 nsپAGPST-GLOT‚ھ-389 nsپAUTC-GLOT‚ھ-189 nsپAGALT-GPST‚ھ-3.4 nsپAUTC-GPST‚ھ0.0 ns‚ئ‚ ‚é‚ج‚إپAژŒnگع‘±Œëچ·پAژŒnچ·گ„’èŒëچ·‚âژَگM‹@ISB‚ًچl—¶‚·‚é‚ئپAGLONASSˆبٹO‚حگ„’è’l‚ح–µڈ‚‚µ‚ب‚¢’l‚ئŒ¾‚¦‚é‚إ‚µ‚ه‚¤پBGPST-GLOT‚¨‚و‚رUTC-GLOT‚حGLONASS‚ھƒAƒ‹ƒ}ƒiƒbƒN‚ئ‚µ‚ؤ•ْ‘—‚µ‚ؤ‚¢‚é’l (TauGPS‚¨‚و‚رTauC) ‚إ‚·‚ھپAUTC-GPST‚ح200 ns‚à‚ب‚¢‚ج‚إ–¾‚ç‚©‚ة–µڈ‚‚µ‚ؤ‚¢‚ـ‚·پBچإگV‚جCircular-T‚ًŒ©‚é‚ئC1(UTC-GLONASS_Time) ‚ھ-180 nsˆتپAC1'(UTC-UTC(SU)_GLONASS) ‚ھ-370 nsˆت‚ج’l‚ئ‚ب‚ء‚ؤ‚¢‚ـ‚·پB‚±‚ê‚©‚çگ„‘ھ‚إ‚«‚邱‚ئ‚حپAGLONASSٹضŒW‚جژŒn‚حGLONASS_Time, UTC(SU)_GLONASS, UTC(SU) ‚ئ3ژي—ق‚ ‚èپAچq–@ƒfپ[ƒ^‚جƒNƒچƒbƒNƒpƒ‰ƒپپ[ƒ^(TauN) ‚ئTauGPS‚حUTC(SU)_GLONASSٹîڈ€پATauC‚حGLONASS_Timeٹîڈ€‚إ‚ ‚éپA‚ئ‚¢‚¤‚±‚ئ‚إ‚·پBGLONASS-ICD 4.4‚ة‚حپuTauN‚حGLONASS Timeٹîڈ€‚ج•âگ³’lپv‚ئڈ‘‚¢‚ؤ‚ ‚è‚ـ‚·‚ھ‚±‚ê‚حCircularT‚جGLONASS_Time‚ئ‚ح’è‹`‚ھˆظ‚ب‚é‚ج‚©‚à‚µ‚ê‚ـ‚¹‚ٌپB‚ئ‚¢‚¤‚±‚ئ‚إپA‚؟‚ه‚ء‚ئ’²‚ׂ½‚¾‚¯‚إ‚àƒ}ƒ‹ƒ`GNSSƒfپ[ƒ^‚جڈˆ—‚ة‚ئ‚ء‚ؤژŒn‚جژو‚舵‚¢‚ھ‘ٹ“––ï‰î‚إ‚ ‚邱‚ئ‚ھ•ھ‚©‚è‚ـ‚·پB‚ب‚¨‰qگ¯‹O“¹‚ً•\‚·ژŒn‚à‰qگ¯Œn‚ة‚و‚ء‚ؤˆظ‚ب‚è‚ـ‚·‚ھپAژŒnچ·‚ھ1ƒتs–¢–‚جڈêچ‡‚ح‚»‚ج‰e‹؟‚ح‹O“¹گ¸“x‚ة”نٹr‚µ‚ؤڈ\•ھڈ¬‚³‚¢‚½‚ك‚ظ‚ع–³ژ‹‚µ‚ؤچ·‚µژx‚¦‚ ‚è‚ـ‚¹‚ٌپB(12:23’ا‹L)
...................................................................................................................................
‚ئ‚¢‚¤‚±‚ئ‚إپA•K—v‚ھ‚ ‚ء‚ؤ–ٌ9ƒJŒژ‚ش‚è‚ةƒپƒWƒƒپ[ƒpƒbƒ` (rtklib_2.4.2_p5) ‚ًƒٹƒٹپ[ƒXپB“à—e“I‚ة‚ح2.4.3‚إ‚à—ا‚¢‚ج‚¾‚¯‚اپBژه‚بڈCگ³“à—e‚حچׂ©‚¢ƒoƒOƒtƒBƒbƒNƒX‚ئGalileo‚ئBeiDouƒTƒ|پ[ƒgپBƒ\پ[ƒX‚ج•دچX“_‚حgithub‚إپB
•â‘«: ‘پپX‚ةBeiDou’P“ئ‚إ‘ھˆت‚إ‚«‚ب‚¢‚ئ‚ج‚²ژw“E‚ً–ل‚¢‚ـ‚µ‚½پBGPS+BDS‚ح“®‚«‚ـ‚·‚ھپAGLO, GAL, BDS’P“ئ‚إ‚حگ³ڈي“®چى‚µ‚ب‚¢—l‚إ‚·پB’P“ئ‘ھˆتƒAƒ‹ƒSƒٹƒYƒ€‚ًڈ‚µ•دچX‚µ‚½‚ج‚إ‚»‚ê‚ھˆ«‚³‚ً‚µ‚½—l‚إپB‚ئ‚¢‚¤‚±‚ئ‚إ‘پپX‚ةrtklib_2.4.2_p6‚ًڈo‚µ‚ؤپAp5‚ً’u‚«ٹ·‚¦‚é—\’èپBڈ‚µ‚¨‘ز‚؟‚ًپB(9:52’ا‹L)
...................................................................................................................................
Why Python is Better than Matlab for Scientific Software
ژ„ژ©گgپA‰ك‹ژ‚©‚ب‚è‚ج—ت‚جMatlabƒRپ[ƒh‚ًڈ‘‚¢‚ؤ‚¢‚éƒwƒrپ[ƒ†پ[ƒUپ[‚ب‚ج‚¾‚¯‚ا (GT‚ح‚ظ‚عMatlab‚¾‚µ)پA‚ح‚ء‚«‚茾‚ء‚ؤMatlab‚ة–¢—ˆ‚ح‚ب‚¢‚ئژv‚¤پB–{ژ؟“I‚ب–â‘è‚حproprietary‚بƒ\ƒtƒgƒEƒFƒA‚إ‚ ‚é“_‚ةگs‚«‚éپB‚ئ‚¢‚ء‚ؤ‚àپAژ„‚جژü‚è‚إ‚à–¢‚¾‚ة‚؟‚ه‚ء‚ئ‚µ‚½ƒOƒ‰ƒt•`‚‚ج‚ةMatlabژg‚¤گl‘½‚¢‚ج‚¾‚¯‚اپBژں‚ح‚؛‚ذپApython+numpy+matplotlib‚إپB
-------------------------------------
InsideGNSS, China Plans to Complete BeiDou Ahead of Schedule, May 21, 2014
’†چ‘‚حپABeiDou‚جگ®”ُŒv‰و‚ً‘O“|‚µ‚µ‚ؤ2017”N‚ـ‚إ‚ةPhase III‚ًٹ®گ¬‚³‚¹‚éپBچ،ڈTپA“ى‹‚إٹJچأ‚³‚ê‚ؤ‚¢‚éCSNC (China satellite navigation conference) 2014‚إ”•\‚³‚ꂽپB
‚±‚ج‹Lژ–‚ة‚و‚é‚ئپAگVگ¢‘مBeiDou‰qگ¯‚ج‘إ‚؟ڈم‚°‚ح—ˆ”N‚©‚çٹJژn‚³‚êپAPhase
III‚جٹ®گ¬‚حڈ]—ˆ‚ج2020”N‚©‚ç2017”N‚ة‘O“|‚µ‚³‚ê‚éپBBeiDou
Phase III‚إ‚حB1گMچ†‚ھGPS L1C/Galileo E1Œفٹ·
(ژü”gگ”‚¨‚و‚رMBOC•د’²) ‚ة•دچX‚³‚ê‚éپB
‚ب‚¨پAGPS III‚ج‘إڈم‚ح2016”N‚©‚ç‚إOCXٹ®گ¬‚ھ2017”NپAGalileo
FOC‰qگ¯‚ج‘إڈم‚àچ،”N––‚ـ‚إ‚ة4‹@‚ئپA“–ڈ‰‚جŒv‰و‚©‚ç‚©‚ب‚è’x‚ê‚ؤ‚¢‚éپB‚ـ‚½GLONASS‚حڈ«—ˆ“I‚ة3CH‚ج"full
family" CDMAگMچ†‚ةˆعچs‚µپACDMAگMچ†‚ً‘—گM‚·‚éژں‚جGLONASS-K2‚ج‘إڈم‚حچ،”N––پB
ˆب‘O‚ج•ٌ“¹‚إ‚حپABeiDou Phase IIIٹ®گ¬ژ‚ج‰qگ¯گ”‚ح35‹@پA‚½‚¾‚µ‚±‚ج‰qگ¯گ”‚ةPhase II‚ـ‚إ‚ج‰qگ¯‚ھٹـ‚ـ‚ê‚é‚ج‚©‚ح•s–¾پB2017”N‚ة‚حٹù‘¶‰qگ¯‚ج‘½‚‚ح‚ـ‚¾‰^—p‰آ”\‚ب‚ج‚إپAگV‚µ‚¢L1CŒفٹ·‰qگ¯‚حƒOƒچپ[ƒoƒ‹ƒTپ[ƒrƒX’ٌ‹ں—p‚ئ‚µ‚ؤژه‚ةMEO‹O“¹‚ة“ٹ“ü‚³‚ê‚é‚ج‚إ‚ح‚ب‚¢‚©پBQZSS4‹@‘جگ§‚إ‚ج‰^—pٹJژn‚ح2018”N“x‚ب‚ج‚إپA‚±‚جژ‚ة‚ح“Œ‹‚ج‹َ‚ح‚à‚¤‚±‚ٌ‚بٹ´‚¶‚ة‚ب‚ء‚ؤ‚¢‚邱‚ئ‚ة‚ب‚éپB
•â‘«: Œ»چف‹O“¹ڈم‚جBeiDou‰qگ¯‚ح16‹@ (MEOپ~5+GEOپ~6+IGSOپ~5) ‚½‚¾‚µGEO 1‹@‚ح‹O“¹گ§Œن•s”\‚إ‚à‚¤ژg‚¦‚ب‚¢‚ج‚إژہژ؟15‹@ (‚±‚جڈî•ٌ‚ة‚و‚é‚ئC30 (MEO) ‚حگMچ†ڈo‚µ‚ؤ‚¢‚ب‚¢‚炵‚¢پB‚ـ‚½C04 (GEO) ‚حƒGƒtƒFƒپƒٹƒXˆظڈي‚إ‚ح‚ب‚¢‚©‚ئ‚ج‚±‚ئ) 2017”N‚ـ‚إ‚ة35‹@‚ئ‚¢‚¤‚±‚ئ‚ح‚ ‚ئ3”N‚إچإ’ل20‹@‘إ‚؟ڈم‚°‚é‚ئ‚¢‚¤‚±‚ئ‚إپA—ˆ”N‚©‚ç‚ـ‚½‘إڈمƒ‰ƒbƒVƒ…‚ة‚ب‚éپB(15:55’ا‹L)
...................................................................................................................................
Inside GNSS, Danish GPS Expert to Lead New Russian GNSS Studies Program, May 20, 2014
‚ا‚±‚©‚إŒ©‚½‚و‚¤‚ب‚¨‚ء‚³‚ٌ‚¾‚ئژv‚ء‚½‚çپAKai Borre‚©پB
-------------------------------------
Surface Pro 3 —~‚µ‚¢‚ب‚ پBŒ‹‹اپAiPad‚àAndroid‚à–â‘è‚حٹJ”ٹآ‹«‚ب‚ج‚إپB–§‚©‚ةGPS“à‘ ‚µ‚ؤ‚é‚ئ—ا‚¢‚ج‚¾‚¯‚اپB
•â‘«: ƒmپ[ƒgPC‚ئ‚µ‚ؤچl‚¦‚é‚ئVaio Pro 13‚ئƒXƒyƒbƒN“I‚ة‚ح‚ ‚ٌ‚ـ‚è•د‚ي‚ç‚ب‚¢‚ج‚¾‚¯‚اپAƒ^ƒuƒŒƒbƒg’P‘ج‚إژg‚¦‚é‚ج‚ح–£—ح“IپBRTKLIB‚àژںٹْ”إ‚إ‚حƒ^ƒbƒ`UI‘خ‰‚µ‚و‚¤‚©‚ب‚ پB
...................................................................................................................................
ƒپƒ‚پBubuntu‚إ‚ج•s—اHDDƒfپ[ƒ^‚جƒTƒ‹ƒxپ[ƒWپBGNU ddrescue‚ًژg‚¤پB
$ sudo apt-get install gddrescue
...
$ sudo ddrescue -r 0 -a 1M -v -f /dev/sdb2
/dev/sda4 rescue.log
/dev/sdb2‚ھ•s—اHDD/ƒRƒsپ[Œ³پA/dev/sda4‚ھƒRƒsپ[گوپB-a ‚ح‚±‚êˆبڈم“]‘—‘¬“x‚ھ‰؛‚ھ‚ء‚½‚çƒXƒLƒbƒv‚·‚éƒIƒvƒVƒ‡ƒ“پB-aƒIƒvƒVƒ‡ƒ“‚ً‚آ‚¯‚ب‚¢‚ئ“]‘—ƒŒپ[ƒg‚ھ100KB/sˆب‰؛‚ة—ژ‚؟‚ؤ‚µ‚ـ‚¤پBƒfپ[ƒ^‚ھ‚ظ‚عƒtƒ‹‚ة“ü‚ء‚ؤ‚¢‚é2TB‚جHDD‚ب‚ج‚إپA-a‚ب‚µ‚إ‚حگâ‘خ‚ةڈI‚ي‚ç‚ب‚¢پBƒچƒOڈo—ح‚·‚é‚و‚¤‚ة‚µ‚ؤ‚¨‚‚ئƒXƒLƒbƒv‚µ‚½ƒZƒNƒ^‚ًچؤƒTƒ‹ƒxپ[ƒW‚µ‚ؤ‚‚ê‚é‚炵‚¢پB
•â‘«: ˆبڈم‚ج“r’†‚إ‚àƒRƒsپ[گوƒfƒBƒXƒN‚ً fsck -y /dev/sda4‚إ•œ‹Œ‚·‚ê‚خƒ}ƒEƒ“ƒg‚إ‚«‚éپB“ٌ“ْٹش‚إ400GB‚‚ç‚¢‚حƒTƒ‹ƒxپ[ƒW‚µ‚½‚¯‚اپAڈ™پX‚ة•½‹دƒŒپ[ƒg‚ھ—ژ‚؟‚ؤپA-aƒIƒvƒVƒ‡ƒ“‚ً‚آ‚¯‚ؤ‚à100KB/sˆب‰؛‚ة‚ب‚ء‚ؤ‚µ‚ـ‚ء‚½‚ج‚إ‘S•œ‹Œ‚ة‚ح”¼”Nˆبڈم‚©‚©‚éپB‚ئ‚¢‚¤‚±‚ئ‚إ‚ ‚«‚ç‚ك‚ؤپA‚¤‚ـ‚چs‚‚©•ھ‚©‚ç‚ب‚¢‚¯‚اHDDƒRƒsپ[‘•’u‚ً’چ•¶پB(5/19’ا‹L)
چؤ•â‘«: ddrescue‚ة‚و‚é’†“r”¼’[‚بƒTƒ‹ƒxپ[ƒW‚إ‚حˆêŒ©گ³ڈي‚ب”j‘¹ƒtƒ@ƒCƒ‹‚ھ‘ٍژR‚إ‚«‚ؤ‚µ‚ـ‚¢پA‚±‚جƒ`ƒFƒbƒN‚ة‚ئ‚ؤ‚àژèٹش‚ھ‚©‚©‚邱‚ئ‚ھ•ھ‚©‚ء‚ؤپAŒ‹‹ا•Kگ{‚جƒfپ[ƒ^‚¾‚¯rsync‚إƒRƒsپ[‚·‚邱‚ئ‚ة‚µ‚½پB‚±‚ê‚إ20GBˆت‚ح‹~‚¦‚½‚ج‚إ‚ئ‚è‚ ‚¦‚¸‚و‚µ‚ئ‚·‚éپB‘S•”‚جƒTƒ‹ƒxپ[ƒW‚ج‚½‚ك‚ة‚±‚¤‚¢‚¤‚جژg‚ء‚ؤŒ»چفHDD‚جƒRƒsپ[’†پB(5/20’ا‹L)
چؤ•â‘«: ƒRƒsپ[‚ج“r’†Œo‰ك‚ح4‚آ‚جLED“_“”‚إ‚µ‚©•ھ‚©‚ç‚ب‚¢پBƒRƒsپ[ژn‚ك‚ؤ5“ْ–ع‚إ2‚آ–ع‚جLED‚إژ~‚ـ‚ء‚½‚ـ‚ـپB“r’†‚إ’†’f‚·‚é‚ئ‚ـ‚½چإڈ‰‚©‚çƒRƒsپ[‚·‚é•K—v‚ھ‚ ‚é‚ج‚إپA‚±‚¤‚ب‚é‚ئ‚à‚¤گâ‘خ‚ة“dŒ¹‚ًگط‚ê‚ب‚¢پB‚³‚ؤ1ƒJŒژ‚ح‚©‚©‚é‚ج‚ًٹoŒه‚µ‚ؤ‚¢‚é‚ج‚¾‚¯‚اپB(5/23’ا‹L)
...................................................................................................................................
T.Suzuki, RTK-GNSS (GPS+QZS+GLO+GAL+BSD) with RTKLIB, May, 2014
—é–طŒN‚ھ‰ü‘¢”إRTKLIB‚إBeiDou‚ًٹـ‚ك‚½ˆع“®‘جRTKگ«”\•]‰؟‚ًچs‚ء‚ؤ‚‚ê‚ؤ‚¢‚é‚ج‚إ“\‚ء‚ؤ‚¨‚پBژَگM‹@‚ح—¼•û‚ئ‚àTrimble NetR9پB‹آٹpƒ}ƒXƒN20“x‚إGPS+QZS+GLO+BDS‚ج•½‹د‰qگ¯گ”‚ح13.1‹@پB
•â‘«: NetR9‚ء‚ؤٹîڈ€‹اگê—p‚إˆع“®‘جƒچپ[ƒo—p‚ةژg‚¦‚ب‚¢‚ٌ‚¶‚ل‚ب‚¢‚ج‚ئژv‚ء‚ؤ‚¢‚½‚çپAژَگM‹@ƒGƒ“ƒWƒ“‚حˆع“®‘ج—p‚ج‚à‚ج‚ئ“¯ˆê‚炵‚¢پBRTCM3 (MSM‚ح‚ـ‚¾–¢‘خ‰) ‚âBINEX‚àڈo‚é‚ئ‚ج‚±‚ئ‚إپARTKLIB‚ئ‘g‚فچ‡‚ي‚¹‚ؤƒٹƒAƒ‹ƒ^ƒCƒ€‚جRTK‚ة—ک—p‰آ”\پB(16:52’ا‹L)
...................................................................................................................................
NASA SpaceFlight.com, ULA Delta IV launches sixth Block IIF GPS satellite, May 15, 2014
2014/05/17 00:03 UTC, GPS Block IIF-6‰qگ¯, •ؤچ‘ƒPپ[ƒvƒJƒiƒxƒ‰ƒ‹‹َŒRٹî’n‚©‚çDelta IVƒچƒPƒbƒg‚إ‘إ‚؟ڈم‚°گ¬Œ÷پB‘إ‚؟ڈم‚°‚ç‚ꂽ‰qگ¯‚حƒXƒچƒbƒgD4‚ة“ٹ“ü‚³‚êBlock IIA-14‰qگ¯ (PRN04) ‚ً’u‚«ٹ·‚¦‚éپB‰qگ¯”شچ†‚حSVN67/PRN06پBژں‚جGPS Block IIF‰qگ¯‚ج‘إ‚؟ڈم‚°‚ح7ŒژپA‚»‚جژں‚ح10Œژ‚إپAژں‰ٌ‚©‚çAltas V‚ھژg‚ي‚ê‚é—\’èپB
‚ب‚¨, 2/21‚ة‘إ‚؟ڈم‚°‚ç‚ꂽBlock IIF-5‰qگ¯‚حپA‘إ‚؟ڈم‚°Œم3ƒJŒژ‹ك‚‚½‚ء‚ؤ‚¢‚é‚ة‚àٹض‚ي‚炸پA‚ـ‚¾گ³ژ®‰^—pٹJژn‚³‚ê‚ؤ‚¢‚ب‚¢پB‚±‚ج——R‚ة‚آ‚¢‚ؤ‚جƒAƒiƒEƒ“ƒX‚ح‚ب‚¢‚ھپA‰½‚ç‚©‚ج–â‘è‚ھ”گ¶‚µ‚ؤ‚¢‚é‰آ”\گ«‚à‚ ‚éپB
•â‘«: ‘إڈمƒrƒfƒIپB‚±‚ج‹Lژ–‚ة‚و‚é‚ئIIF-5‚ح"navigation characterizing testing"‚ھ‚à‚¤‚·‚®ڈI‚ي‚ء‚ؤپAچ،Œژ––‚ـ‚إ‚ة‰^—p‚ھٹJژn‚³‚ê‚é‚ئ‚ ‚éپB(16:03’ا‹L)
...................................................................................................................................
P.26‚إ"Adding more satellites after locking is the main reason of losing the lock"‚ھƒoƒO‚¶‚ل‚ب‚¢‚©‚ء‚ؤ‚ ‚邯‚اپA‚±‚êƒoƒO‚¶‚ل‚ب‚¢‚ئژv‚¤‚ج‚و‚ثپB"fixable"‚ئ‚ ‚é‚ج‚إ‚¨ژè•ہ‚ف”qŒ©پB
...................................................................................................................................
2014/04/28 14:30 UTC‚©‚çپAGPS L2C, L5 ƒ`ƒƒƒ“ƒlƒ‹‚إCNAV‚ج"pre-operational"‚ب‘—گM‚ھژn‚ـ‚ء‚½‚ح‚¸‚ب‚ج‚إپANovAtel
OEM6‚إ‚جژو“¾‚ًژژ‚ف‚ؤ‚¢‚é‚ج‚¾‚¯‚اپA‚ا‚¤‚à‚¤‚ـ‚ژَ‚©‚ء‚ؤ‚¢‚ب‚¢پBژèڈ‡‚ئ‚µ‚ؤ‚حپAOEM6‚حƒfƒtƒHƒ‹ƒg‚إ‚حL2P(Y)‚ًژَ‚¯‚é‚ج‚إ‚±‚ê‚ًL2C‚ة‚·‚邽‚ك‚ةپA
[USB3] forcegpsl2code c
<OK
‚ئ‚â‚ء‚ؤ‚©‚çپAF/W 6.400‚إ’ا‰ء‚³‚ê‚ؤ‚¢‚éƒپƒbƒZپ[ƒWrawcnavframe
(ID=1066) ‚ًڈo—ح‚·‚邽‚كپA
[USB3] log rawcnavframea onnew
<OK
‚ئ‘—‚éپBƒGƒ‰پ[‚ة‚ح‚ب‚ç‚ب‚‚ؤOK‚ھ•ش‚é‚ج‚إ—LŒّ‚ة‚ب‚ء‚ؤ‚¢‚é—l‚¾‚¯‚اپAچ،‚ج‚ئ‚±‚ëƒچƒO‚ھڈo—ح‚³‚ê‚ب‚¢پB‚ب‚¨OEM6‚جڈêچ‡L5‚حƒpƒCƒچƒbƒg‚جQ
CH‚µ‚©ƒgƒ‰ƒbƒLƒ“ƒO‚µ‚ب‚¢—l‚إپAL5 CNAV‚ًژَگM‚·‚é‚ج‚ح–³—‚ف‚½‚¢پB‚ئ‚¢‚¤‚±‚ئ‚إپA—ˆڈT‚ة‚ب‚ء‚½‚çJAVAD‚إژژ‚µ‚ؤ‚ف‚و‚¤پB‚à‚µپACNAV‚؟‚ل‚ٌ‚ئژَ‚©‚ء‚ؤ‚¢‚éگl‚¢‚½‚狳‚¦‚ؤ‚‚¾‚³‚¢پB
•â‘«: JAVAD‚جƒfپ[ƒ^‚ھژè‚ة“ü‚ء‚½‚ج‚إ [gd] (gps raw navidation data) ‚ًƒfƒRپ[ƒh‚µ‚ؤ‚ف‚½پBMT‚ئ‚µ‚ؤ‚ح10 (ephemeris 1), 11 (ephemeris 2), 30 (clock, iono & group delay), 33 (clock & utc) ‚ھ‘—‚ç‚ê‚ؤ‚¢‚éپB‚؟‚ب‚ف‚ةپAQZSS‚ح‚±‚ê‚ç‚ة‰ء‚¦‚ؤپA14, 28, 31, 34, 35, 37‚ھ‘—‚ç‚ê‚ؤ‚¢‚éپB(14:42’ا‹L)
2 L5CNAV: sat=25 prn=25 msgid=33 tow= 74764 alert=0 2 L2CNAV: sat=25 prn=25 msgid=11 tow= 74764 alert=0 2 L2CNAV: sat=29 prn=29 msgid=11 tow= 74764 alert=0 2 L2CNAV: sat=31 prn=31 msgid=11 tow= 74764 alert=0 2 L2CNAV: sat=12 prn=12 msgid=11 tow= 74764 alert=0 2 L5CNAV: sat=25 prn=25 msgid=10 tow= 74765 alert=0 2 L5CNAV: sat=25 prn=25 msgid=11 tow= 74766 alert=0 2 L2CNAV: sat=25 prn=25 msgid=30 tow= 74766 alert=0 2 L2CNAV: sat=29 prn=29 msgid=30 tow= 74766 alert=0 2 L2CNAV: sat=31 prn=31 msgid=30 tow= 74766 alert=0 2 L2CNAV: sat=12 prn=12 msgid=30 tow= 74766 alert=0 2 L5CNAV: sat=25 prn=25 msgid=30 tow= 74767 alert=0 2 L5CNAV: sat=25 prn=25 msgid=33 tow= 74768 alert=0 2 L2CNAV: sat=25 prn=25 msgid=33 tow= 74768 alert=0 2 L2CNAV: sat=29 prn=29 msgid=33 tow= 74768 alert=0 2 L2CNAV: sat=31 prn=31 msgid=33 tow= 74768 alert=0 2 L2CNAV: sat=12 prn=12 msgid=33 tow= 74768 alert=0 2 L5CNAV: sat=25 prn=25 msgid=10 tow= 74769 alert=0 2 L5CNAV: sat=25 prn=25 msgid=11 tow= 74770 alert=0 2 L2CNAV: sat=25 prn=25 msgid=10 tow= 74770 alert=0 2 L2CNAV: sat=29 prn=29 msgid=10 tow= 74770 alert=0 2 L2CNAV: sat=31 prn=31 msgid=10 tow= 74770 alert=0 2 L2CNAV: sat=12 prn=12 msgid=10 tow= 74770 alert=0 ...
...................................................................................................................................
5Œژ‚إ‚ ‚éپB
...................................................................................................................................
| Home | by T.Takasu |