{kind=link}
|
日記・備考録 |
2005 | 2006 | 2007 | 2008 | 2009 | 2010 | 2011 | 2012 | 2013 | 2014/ 1 2 3 4 5 6 7 8 9 10 11 12 | 2015 |
| September | October 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
November | Home |
...................................................................................................................................
ということで、sparkfunでedison and mini breakout kit注文しちゃった。$74.95+$12.84也。後から考えたら技適大丈夫か心配になったのだけど、ま、いいか。
-------------------------------------
u-blox Product Catalog 16 Wireless & Positioning Solution 2015
u-blox社の来年のカタログにNEO/LEA-M8Tというraw対応u-blox 8モジュールが含まれていることを教えてもらった (p.72)。入手したらRTKLIBで正式サポートの予定。
-------------------------------------
IGS Workshop 2014, June 23-27, 2014, Pasadena, US
6月に米国パサデナCaltechで行われたIGS WS 2014の、ビデオ、発表資料、ポスターが公開。(ビデオは重たくて、現在正常に再生できないが、"View Slide"で発表資料だけダウンロードできる) 20周年記念のWSということもあり、PlenaryではIGSの主要関係者が概ね登場しているので顔を覚えるのには良い。(そういえばJim Rayはいなかった様な)
...................................................................................................................................
高須, u-bloix社NEO-M8N受信機によるマルチGNSS RTK性能の評価, 2014年10月28-30日, GPS/GNSSシンポジウム2014, 東京海洋大学 越中島会館
本日の発表資料をアップ。NEO-M8Nのrawメッセージについてはメーカ保証範囲外なので、使用の判断は自己責任で。(将来のバージョンでは利用できないない可能性もあります) くれぐれも本件についてu-blox社に問い合わせをしない様に。
-------------------------------------
NASA SpaceFlight.com, ULA Atlas V successfully launches with GPS IIF-8 satellite, October 29, 2014
2014/10/29 17:21 UTC, GPS Block IIF衛星8号機, 米国ケープカナベラル空軍基地からAtlas Vロケットで打ち上げ成功。衛星番号はSVN69/PRN03、軌道スロットはE1。今後のGPS衛星の打ち上げは来年3月と6月の予定。しかしこの写真カッコいいなあ。
...................................................................................................................................
PC Watch, 本日発売、Intelの極小コンピュータ「Edison」インプレッション, 2014年10月25日
Edisonのスペックはこちら。CPU dual-core Atom 500MHz, RAM 1GB, Flash 4GB, WiFi, Bluetooth 4.0, USB 2.0, SD, UART, I2C, SPI etc.。OSはYacto Linux。性能的にはARM 700MHzのRaspberry Piとあんまり変わらなそう。SparkFunで$49.95。MAX-M8Qと組み合わせて、誰か超小型マルチGNSS RTKエンジン作りません。(Trimble BD910 に対抗して)
-------------------------------------
u-blox NEO-M8 (写真を見る限り M8N) が@19.98ユーロ (\2,760)。10個だと\24,800なので、まとめ買いしようかな。
...................................................................................................................................
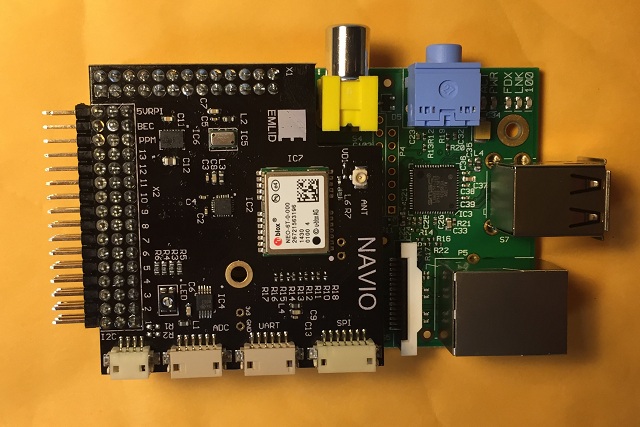
NAVIO来た。本体$195で、Raspberry Pi (type B) が\4500位。NEO-6T版なんだけど、今さらu-blox 6という気がしないこともない。出来ればNEO-M8Nに換装したいのだけど、モジュールを綺麗に外すのは相当難しい。半田ごてと吸い取り線じゃ多分無理だろうなあ。ヒートガン欲しい。
補足: 同軸コネクタがやたら小さいのだけど、これ何てコネクタ? SMA変換のケーブルってどこかで売ってない? (16:37追記)
再補足: U.FLコネクタというらしい。SMA変換はスイッチサイエンスで取り扱っているが、現在在庫切れ。千石で売ってるらしいので今度東京に出た時に買いに行こう。(16:50追記)
再々補足: このブログ読んだEMLIDのMikhailがコメントくれた。ublox 6とublox 7/8は完全ピンコンパチではないらしい。丁寧にもヒートガンでのはずし方も教えてくれたのでその部分だけ抜粋。Mikhail ありがとう。ということでM8N版のNAVIOが欲しい。(19:56追記)
> I wanted to warn you that Ublox 6 series
and Ublox 7/8 series are not
> fully pin-to-pin compatible - SPI pins
are different.
> We used a few 0ohm resistors to multiplex
the SPI signals for different
> GPS versions. So if you'd like to change
to M8N you should:
> - Remove R16, R12, R10, R14
> - Install 0ohm resistors (or just solder
the lead between pads) on R17,
> R13, R11, R15, R18
>
> Use hot air gun to heat one side of
Ublox module, then use twizzers or
> thin knife to pull up this side just
a little bit (really just a little
> bit - or you will damage the pads on
the other side), then heat the other
> side and then remove the module. It's
better to ask someone to help you
> with this because it's hard to operate
alone both with hot air gun and
> knife\tweezers
...................................................................................................................................
メモ。こういうコードが最近のgccではwarningがでる。
35 static unsigned short U2(unsigned char *p)
36 {
37 unsigned char b[2];
38 b[0]=p[1]; b[1]=p[0];
39 return *(unsigned short *)b;
40 }
rcvlex.c 39:5 warning: dereferencing type-punned pointer will break strict-aliasing rules [-Wstrict-aliasing]
ちょっと調べると、以上は最適化されると動作保証されないコードらしい (参照)。union使うのが移植性高い解決策の様だ。ということで以下の様に書きかえる。
35 static unsigned short U2(unsigned char *p)
36 {
37 union {unsigned short u2; unsigned char b[2];} buff;
38 buff.b[0]=p[1]; buff.b[1]=p[0];
39 return buff.u2;
40 }
しかし、20年位Cのプログラム書いてるけどunion使ったの3回目位だな。(あとbit fieldやgotoもまず使わない)
-------------------------------------
InsideGNSS, New Home (or Not) for Galileo in European Commission, October 23, 2014
次のGalileo衛星の打上日程について言及しているけど、 "Next launch, of two with Soyuz, could be in February, followed by an Arianne 5 launch in September-October [2015]" とのこと。
-------------------------------------
ついでなのでGSC (Euopean GNSS service centre) によるGalileoの運用情報。NAGU (notice advisory to Galileo users) のアーカイブはこちら。なおBeiDouの場合、知る限りNANU, NAGU, NAGU, NAQUの様な公式運用情報は提供されていない。
-------------------------------------
準天頂衛星システムサービス, リレーインタビュー第8回 測位航法学会を立ち上げ、世界トップレベルの衛星測位技術者育成に貢献する。
安田先生のインタビューが掲載されていたのでとりあえず貼っておく。
-------------------------------------
CGSIC: FW: GPS IIF-8 Launch, October 21, 2014
GPS Block IIF-8衛星の打上情報。打上は2014/10/29 5:21 UTC、衛星番号はSVN69/PRN03で、スロットE1のSVN51を置き換える。衛星初期運用前にSVN38/PRN08が停止されてPRN08は試験用にSVN49にアサインされる。NANU2014078によるとSVN38/PRN08は2014/10/30 15:00 UTCから"unusable until further notice"。
この辺の衛星切り替えをトラックしないと抱えているプロジェクトで色々と困るので、最近注意をして運用情報をチェックしているのだけど、どこのサイトも情報が整理されていなくて分かりにくい。全部のGNSS衛星の運用情報を整理して提供するサイト誰か立ちあげてくれないかな。
補足: 運用情報と言えば、GPSならNAVCENだけどGPS Constellation Statu見ても、PRN03が現在停止中であることが分からない。(PRN03は、SVN33が2014/8/2に運用停止、SVN35が2014/9/5に送信開始、2014/10/20に停止、ただしSVN35はアルマナックに含まれないので試験送信。信号確認はIGSによる)。GLONASSならIACだけど、問題はNAGUのアーカイブがなくて過去履歴をトラック出来ない。(10:55追記)
...................................................................................................................................
第19回 GPS/GNSSシンポジウム2014, 2014年10月28-30日, 東京海洋大学 越中島会館
いつまでたっても公式頁にアップされないので、メールで送られてきた最終プログラムを貼ってしまおう。10/30 AMにネタ発表の予定。
補足: やっと更新。(10/27追記)
...................................................................................................................................
GoProの魚眼版という感じ。これ動画データにタイムタグ埋め込めないかなあ。しかしUAVの撮影用によさそう。
補足: どこ探してもちゃんとした仕様が書いてないのだけど。もっとよーく探したらユーザマニュアルがあった。p.30から主な仕様を書きだすと、センサ: 1/2.33" MOS, 実効画素数: 16.36M, レンズ: F2.8 固定フォーカス 214度 電子手ぶれ防止, 静止画: 3264x3264/2592x1944/1920x1080, 動画: 1920x1080 (30fps)/1440x1440(30fps)/.../848x480 (60fps/120fps), 形式: Exif2.3/MP4, その他: 1" LCD/2軸水平器, 感度: ISO 100-800, 記録: 内蔵8MB/ microSD/SDHC (32GB以下), I/F: USB 2.0/HDMI(Type D)/WiFi/NFC, バッテリ: Li-ion 3.6V/1250mAh, サイズ: 41.1×50.0×38.0mm, 重量: 103g、とのこと。値段 $300位らしいのでなかなか良さそう。(19:31追記)
...................................................................................................................................
GPS World, Qualcomm to Acquire SiRF Chipmaker CSR, October 20, 2014
QualcommがCSRごとSiRFを買収。今後、Broadcom-Global
Locate vs. Qualcomm-SiRFの構図。Qualcommって既にGNSS ICの最大手な訳で、なぜ今買収という気もするがSiRFの持ってるパテント欲しいのかも。Wikipediaによると、QualcommとCSRのrevenue
(2013) はそれぞれ $25B と $960M、なので全然規模が違う。ついでなので半導体大手の売上ランキングはここ。GNSS IC作っているところでは、Qualcomm 3位、Broadcom
8位、STMicro 9位、MediaTek 14位、Sony 15位
(2013)。全然そう見えないけど、こう見るとSonyって半導体大手なんだ。
...................................................................................................................................
rtklib 2.4.3 b2のコミットに失敗して、修正したファイルが戻らなくなった。復旧しようとしてさらに状況が悪化するのもいつもの通り。仕方ないのでgithubからgit cloneして、バックアップから修正したファイルを戻す。一部ファイルは戻ってこないので再度修正が必要。gitの時代になっても相変わらずエラーが発生していったん整合性が崩れると復旧するのは簡単でない。元々VCS使っているのに、なぜコミット前にバックアップ取る必要があるのか。早く、ファイルシステムとVCSが統合されて何も考えなくても過去の状態に簡単に戻れる様になって欲しいのだけど。
補足: 多分、ソースファイルや実行ファイルを閉じない状態でコミットしたので、途中でエラー発生したのが原因ではないか。VCSって皆、処理途中のエラー処理が弱い。エラー発生したら最初に戻してほしいのだけど、戻さないで終了しちゃうことが多い気がする。(8:53追記)
...................................................................................................................................
現在、PPP-Wizardを連続運転で評価しているのだけど、IGS FFMJ1 (Javad+RTCM3) のストリームでは問題がでないけど、GMSD0 (Trimble+RTCM3) やJavad rawストリームでは正常にPPP-AR解が得られない。GMSD0の場合は解が大きく乱れる (多分ミスFIXが原因)、Javad rawの場合は周期的にスパイク誤差が出る (多分エフェメリス切り替えに起因)。PPP-Wizardのモニタ頁見るとかなり性能出ているのだけど。なかなか一筋縄ではいかないなあ。
...................................................................................................................................
ランダウ・リフシッツ理論物理学教程の英語版が無料オンライン公開されたらしいのでPDF版のリンクを貼っておく。
L.D.Landau and E.M.Lifshitz, Course of Theoretical
Physics, Pergamon Press
Volume 1 Mechanics (2nd ed.)
Volume 2 The Classical Theory of Fields (3rd
ed.)
Volume 3 Quantum Mechanics Non-relativistic
Theory (2nd ed.)
Volume 4 Relativistic Quantum Theory Part
1
Volume 5 Statistical Physics (2nd ed.)
Volume 6 Fluid Mechanics (3rd ed.)
Volume 7 Theory of Elasticity (2nd ed.)
Volume 8 Electrodynamics of Continuous Media
1,2,3の日本語版は持ってるけど「現代物理学の金字塔」と帯にある。1は大学の物理の講義で使っていたはずだけど、最初から付いていけなかった覚えがある。調べたら日本語版は既に絶版らしい。まあ学部の講義に使うには難しすぎるかも。そのうち、ちゃんと読みたいとずっと思っているのだけど、いつになることやら。
...................................................................................................................................
準天頂衛星システムサービス, パフォーマンススタンダード (PS-QZSS) 及びユーザインタフェース仕様書 (IS-QZSS)
PS-QZSS及びIS-QZSSのうち、サブメータ級測位補強/災害・危機管理通報サービス編及び測位技術実証サービス編のドラフト版が公開されている。10月27日まで意見・質問を募集している。
(1) サブメータ級測位補強サービス L1Sチャネルの信号構造はSBAS互換。航法メッセージは一部のSBAS互換メッセージ
(MT0, 1, 2, 3, 25, 26, 63) および非互換メッセージ。ただしSBAS互換メッセージのうちインテグリティ
(MT6) 、劣化係数 (MT7, 10)、クロック-軌道共分散
(MT28) 等は含まれていない。またIGPマスク
(MT18) が含まれていないので、電離層グリッドは固定。SBAS互換メッセージとの使い分けが不明だがDGPS補正
(MT50) が追加されている。なお、"みちびき"
L1-SAIF+で送信されていたTTFF高速化用メッセージは含まれていない。
(2) 災害・危機管理通報サービス用に災危通報 (MT43,44) が追加されている。
(3) 測位技術実証サービス用 L5Sチャネルは、シンボルレート10.23McpsのQPSK
(I: パイロット、Q: データ)。拡散コードはGPS
L5と同じだが、信号構造の互換性はない。航法データレートは250bpsで、実効メッセージレート212
bps。ヌルメッセージ (MT63) 以外のメッセージは定義されていず「本サービスの利用者側の定義による」としている。
L1Sチャネルの仕様はSBASの最低仕様を満足しないはずで、SBASとしては利用することはできないと思われる。さて、MSAS後継どうするんだろう。
補足: 測位技術実証サービス編には共通編 3.1.5にあるL1Sbチャネル (GEO衛星のみ) に関する記述が含まれていない。これは今後追加されるのかもしれない。(10/18追記)
-------------------------------------
メモ:スレッドセーフでないC (C89) 標準関数
ctime(), getenv(), gmtime(), localtime(), rand(), strerror(), strtok(), system(), tmpnam()
これらは原則としてマルチスレッド中で使ってはいけない。なお、C言語仕様自体では標準関数のスレッドセーフを保証していないが (すなわち環境依存) 、これ以外の関数はPOSIX.1-2001, 2008の規定でスレッドセーフが保証されている。(参照)
ということで、マルチスレッド中の文字列処理で、たまに異常動作する箇所を追って行ったら、呼び出し先の先の先でstrtok() 使って文字列パースしているところが見つかった。これらは単体試験をすり抜け、めったに問題を発生しない大変危険な関数群。危ないので、コーディング規約で原則使用禁止にした方が良い。
補足: といってもスレッドセーフの代替関数 strtok_r() 等はWindowsでは用意されていないみたいで、代替関数使うと可搬性に問題が出る。仕方ないので自分で書くか、マルチスレッド中では排他して使うか、という話になる。(10/18追記)
再補足: ライブラリ実装においてスレッドセーフ特性は特に重要なので、少し標準関数の状況を調べる。Windowsの場合はこれあたり参照。最近のWindowsのCRT (C runtime) は全てマルチスレッド版に置き換わっている。ただライブラリリファレンスを見てもスレッドセーフ特性についての規定がない様だ。経験的にはsprintf() とかはマルチスレッドで問題が発生したことはないので、上記関数以外は多分安全とは思うのだけど。(10/18追記)
...................................................................................................................................
ロボカーコンテストのTwitterを見つけたので貼っておく。今年はQZSSからL1-SAIFで送られたルート指示に従って走るスクランブル競技があるらしい。
-------------------------------------
NASASpaceFlight.com, Indian PSLV lofts IRNSS-C satellite, Octorber 15, 2014
2014/10/15 20:02 UTC, インドのIRNSS-C衛星, インド サティシュ・ダワン宇宙センターからPSLVロケットで打ち上げ成功。IRNSS衛星としては3機目。軌道はGEOで静止位置は東経83度。既に、東経55度のIGSO軌道にIRNSS-A,B衛星が投入済みで、今後GEO衛星2機 (東経34および132度) およびIGSO衛星2機 (東経111度) を打ち上げて、2015年末までに7機構成のシステムを完成する。次の打ち上げは、12月のPSLV-XLロケットによるIRNSS-D衛星の予定。
-------------------------------------
第58回宇宙科学技術連合講演会, 2014年11月12-14日, 長崎ブリックホール
詳細プログラム公開。セッションOS16-3 ではMADOCA-PPP関連で4件発表予定なので、ご興味を持たれた方はどうぞ。
...................................................................................................................................
第8回GPS・QZSSロボットカーコンテスト2014, 2014年10月18日, 東京海洋大学越中島キャンパス
今年は生中継がある様。
-------------------------------------
GALILEO European Global Navigation Satellite System
個人ブログなのだけど、書いているのは多分Galileoプロジェクト関係のプロではないかと思う。
-------------------------------------
準天頂衛星システムサービス, 第3回準天頂衛星シンポジウム (QZSS産学官利用拡大プラットフォーム会議), 2014年10月30日, 東京海洋大学 越中島会館
GPS/GNSSシンポジウム2014との併催。
-------------------------------------
str2strを少し改修して、-in オプションを省略した場合、標準入力からデータを入力する様にした。
$ ./getStream < conf_ffmj.txt | ./processStream
conf_process.txt rover.txt "*.DCB"
| \
./pppw2pos | str2str -out tcpsvr://:10001
とやってあげて、RTKPLOTから接続して、PPP-WIZARD解をプロットできる様になった。ただし、Ubuntu標準のawkでは、fflush()やsystem("") で標準出力のバッファリングが解除できない様で30秒分まとめてでしか出力されない。仕方ないのでgawkを入れ直したらちゃんと動く様になった。
...................................................................................................................................
CNES PPP-WIZARDの新しいPPPパッケージがリリースされたらしい (参照) ので、Denisに連絡してダウンロードさせて貰って、少し使ってみた。実行環境はUbuntu。
(1) プログラムのビルド。コンパイルにはg++が必要。
$ unzip PPPWizard10.zip
$ cd PPPWizard10
$ ./compile.sh
(2) 入力ストリームの編集。ここではIGS FFMJ、CNES
SSR (CLK91)、IGS-EPHストリームを指定。
$ vi conf_ffmj.txt
user:password@www.igs-ip.net:2101/FFMJ1 7
1
user:password@products.igs-ip.net:2101/CLK91
7 1
user:password@products.igs-ip.net:2101/RTCM3EPH
7 1
(3) 受信した入力ストリームをgetStreamを使っていったんファイルに保存する。出力は16進ダンプの様なテキスト形式。
$ ./getStream < conf_ffmj.txt > stream.out
(4) 保存した入力ストリームをprocessStreamを使ってPPP解析。設定はパッケージに含まれるデフォルトのまま。
$ ./processStream conf_process.txt rover.txt
"*.DCB" < stream.out | ./pppw2pos
> FFMJ.pos
ここでpppw2posはPPPW形式をRTKLIB形式に変換する以下の様なawkスクリプト。
#!/usr/bin/awk -f
BEGIN {
printf("%-24s %13s %13s %13s %3s %3s %8s %8s %8s %8s %8s %8s %6s %6s\n",
"% GPST","x-ecef(m)","y-ecef(m)","z-ecef(m)","Q","ns","sdx(m)",
"sdy(m)","sdz(m)","sdxy(m)","sdyz(m)","sdzx(m)","age(s)","ratio");
}
{
gsub("-","/",$1);
printf("20%s %s %13.4f %13.4f %13.4f %3d %3d %8.4f %8.4f %8.4f %8.4f %8.4f %8.4f %6.2f %6.1f\n",
$1,$2,$8,$11,$14,6,$5,$10,$13,$16,0,0,0,0,0)
}
1時間12時間程度のストリームを解析した結果は以下の通り。衛星数を見る限りGPS+GLONASS解の様。10分で10cm程度に収束しているように見える。上下は40cm20cm程度のオフセットが出ているが、受信機アンテナモデルを指定していないせいではないかと思う。
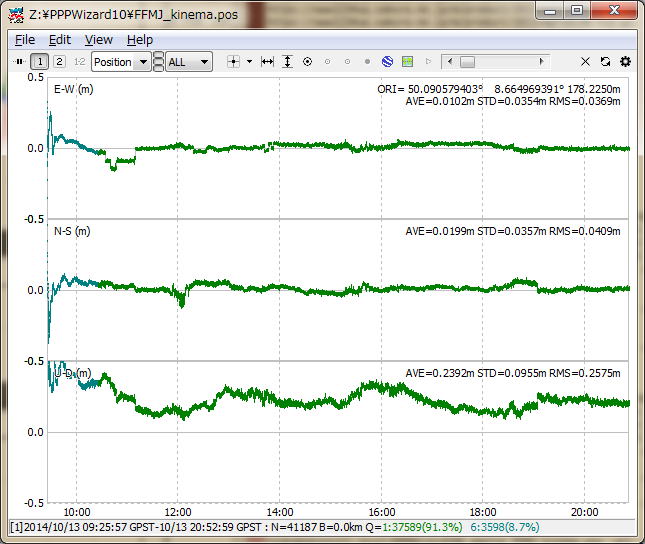
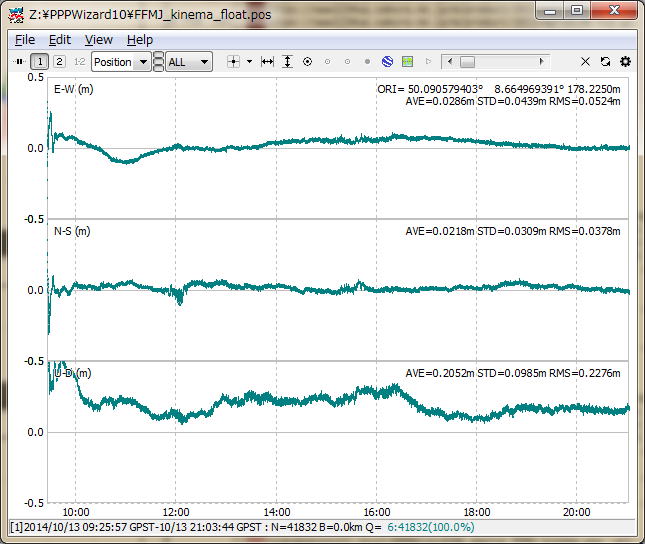
補足: 12H程度のストリームによる解 (左) に置き換え。ついでなのでフロートPPP解 (PPP_DF解) (右) も。ARの効果は明らかだが、NL-FIXまでには1時間程度はかかっている。実行時間は約12Hの解析で2分18秒、エポックあたり3.3 ms (Core i7 2600K)。CPU負荷を見る限りシングルスレッドでしか動いていない様だが、かなり速い。ただ精度は、水平RMSで4cm、垂直RMSで6cm位で、予想したほど出ていない。これはパラメータのチューニングが必要なのかもしれない。(10/14追記)
再補足: リアルタイムの場合、./getStream <conf_ffmj.txt | ./processStream conf_process.txt rover.txt "*.DCB" とすれば、問題なく動く。結果は標準出力に出力されるので、これを適当にリダイレクトすれば良い。str2strに標準入力からの入力モードを付けよう (NTRIP配信やログスワップも可能になるので)。 (10/14追記)
再々補足:
(1) Ubuntuだとcompile.shがエラーとなる。dashではスクリプトが正常に動かない様で、1行目の/bin/shを/bin/bashに書き替える必要がある。
(2) 受信機データのストリーム種別やフォーマットを変更するためには、conf_*.txtの1行目を、user:password@ntripcaster_addr:port/mp 7
4、等に書きかえる。ここで7はストリーム種別、4はフォーマットで、値はrtklib.hに定義されている通り。オリジナルではフォーマットとして,
RTCM3, UBX, NVSしか使えないが、processMessage.cppの680行または696行を書きかえることにより、RTKLIBでサポートしているフォーマットは全部入力できる。(10/17追記)
-------------------------------------
T.Takasu, M.Miyoshi, K.Kawate and S.Kogure, The current status of MADOCA-PPP development, The 6th Asia Oceania Regional Workshop on GNSS, October 9-11, 2014, Phuket, Thailand
AORWS発表資料をアップ。来年度まで続くプロジェクトの途中報告なのでその旨ご理解を。今後、GPS/GNSSシンポ、測地学会、宇科連、ION ITMでも報告がある予定 (私は話さないけど)。
-------------------------------------
準天頂衛星システムサービス, PS-QZSS及びIS-QZSS説明会, 2014年10月21日, NEC芝倶楽部
実用準天のIS (ユーザインタフェース仕様) 及びPS (性能仕様) の説明会。今回の対象は、サブメータ級測位補強、災害・危機管理通報、及び測位技術実証サービスに関するもの。衛星安否確認、共通編・衛星測位 (英語版)、及びセンチメータ級測位補強サービス、に関しての説明会は11月下旬予定。参加にはQSUS (準天頂衛星システム利用者会) の会員登録が必要。なお、既に発行済みのIS, PS (ドラフト, 2014年3月31日版) はここからダウンロードできる。
...................................................................................................................................
Arianespace, Soyuz Filght VS09: Independent Inquiry Board announces definitive conclusions concerning the Freget upper stage anomaly, October 8, 2014
8/22のGalileo FOC衛星打上失敗に関する独立調査委員会報告。問題はNPO Lavotchkin製の上段ステージFregatの"ballistic phase" 最初に発生。2つの姿勢制御スラスタ燃料供給ラインのヒドラジンが凍結・一時停止し、異常姿勢の状態でメインエンジン噴射がなされたのが直接原因。燃料が凍結した原因は、ヒドラジンと低温ヘリウムの供給ラインが同一支持構造を使って実装され熱的ブリッジを生成したため。この問題は設計文書の曖昧性により発生し、システム設計の熱解析でもこの熱移送が考慮されていなかった。
補足: 8月末のロシア一部新聞の報道では、問題はFregatのソフトウェアバグが原因ではないかとされていたが、上記報告によるとソフトウェアは全く関係なかったということになる。(21:36追記)
再補足: Arianespaceによれば問題は既に是正され12月にはSoyuzの打上が再開できるとしている。ただ、この記事によると12月に予定されていた次のGalileo衛星の打上は来年にスリップする模様。(10/13追記)
-------------------------------------
AORWS@Phuketから帰国。
...................................................................................................................................
NASASpaceFilight.com, Japan lofts Himawari 8 weather satellite via H-IIA rocket, October 6, 2014
測位とは直接関係ないけど、ひまわり8号の打上が成功した様で。といってもまだ衛星分離までで、先日のGalileo FOC衛星の様なこともあるので、まだ安心はできない。記事には気象衛星「ひまわり」の歴史が書かれている。個人的に思い出深い衛星なので少し内容をまとめてみる。「ひまわり」の最初の5機の気象衛星 (GMS) は、米Hughes社製で、初号機は1977年7月にデルタ2914ロケットで、2-3号機はN-IIロケットで、4号機はH-Iロケットで、5号機はH-IIロケットで打ち上げられた。6号機からMTSAT (運輸多目的衛星) となり、1999年に、SSL社製のMTSAT-1衛星がH-II 8号機で打ち上げられたが、ロケットの不具合で打上失敗。衛星は爆破された。同一設計の代替機MTSAT-1Rが急きょ製作され、2005年にH-IIAロケットで打ち上げ (ひまわり6号)。翌年、三菱電機社製のMTSAT-2が6号のバックアップとしてH-IIAロケットで打ち上げられた (ひまわり7号)。両衛星機器の設計寿命は5年であり、6号の衛星寿命が尽きる2010年には運用が7号に切り替えられている。2015年中旬には、今回打ち上げられた8号が運用開始され、7号はバックアップに回り、6号は運用停止される。2016年には、9号が打上られ、2022年頃に8号の運用を引き継ぐ予定。
なお、MTSAT-1R, 2には日本版SBASであるMSASのペイロードが搭載されており、こちらは2007年9月から実運用に供され既に7年経過している。ひまわりが8号から単独衛星となったことで、MSAS用後継衛星がどうなるかが心配になるが、こちらについては、まだ正式には何も発表されていない。色々なオプションが有り得るが実際どうなるのだろう。
補足: 個人的に少し仕事で関わっていたのはGMS-5からMTSAT-1位までなのでもう20年近く昔と言うことになる (まあ歳が分かる)。 (15:45追記)
再補足: こう振り返ってみると、1999年のMTSAT-1の打上失敗から2005年のMTSAT-1Rの打上まで、5年以上間が空いており、この間、GMS-5が老骨に鞭を打って頑張っていたことが分かる。確か最後の方は燃料が足らなくなって南北の軌道制御を省略したので画像が全部取れなかった時間帯があったのではなかったかと思う。次の衛星までの繋ぎに米国の古い気象衛星GOESを借りて使っていた時期もあったはず。GMS-5偉かったなあ。(16:05追記)
...................................................................................................................................
測位航法学会, 第18回GPS/GNSSシンポジウム2014, 2014年10月28-30日, 東京海洋大学 越中島会館
秋恒例のGPS/GNSSシンポジウム。10/30午後にはQSSシンポジウムが併催される。講演会は参加無料なので奮ってご参加を。
なお、来年の秋はInternational Symposium on GPS/GNSS 2015 (IS-GNSS 2015) と併催で京都の予定とのことである。
補足: GPS/GNSSシンポの講演会無料参加の場合、10/24までに事前参加登録が必要なのでご注意を。(10/6 追記)
...................................................................................................................................
Tegra K1搭載のゲーム用タブレットShield。$299で、GPS/GLONASS受信機と9軸IMUが載っている。SDRのプラットフォームとして良さそうに見えるけど、開発環境揃えるのが大変かも。
-------------------------------------
The sixth Asia Oceania Regional Workshop on GNSS, October 9-11, 2014, Phuket, Thailand
第6回AORWS@プーケット。第1回から皆勤なので一応今回も参加予定。観光目的以外のタイ入国にビザが必要かはグレーらしいのだが、事務局に問い合わせたら大丈夫ですよ、とのことだったのでなしで行く。入国出来なければ諦めて帰る予定。
-------------------------------------
GPS World, Which Industry Be the Largest Consumer of RTK Technology?, October 2, 2014
先日のION GNSS+のパネルが記事になっているが、"RTK GNSS modules in China are selling for only $400 today” とのこと。これ1周波では無いよね。どこで買えるのだろう。
...................................................................................................................................
| Home | by T.Takasu |