|
擔婰丒旛峫榐 |
2005 |
2006 |
2007 |
2008 |
2009 |
2010 |
2011 |
2012 |
2013 |
2014 | 2015/ 1
2
3
4
5
6
7
8
9
10
11
12 |
2016 Search |
| December | January 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
February | Home |
...................................................................................................................................
Qualys Seurity Advissory CVE-2015-0235: GHOST: glibc gethostbyhame buffer overflow
gethostbyname() 惼庛惈丅GHOST偲偄偆柤慜偑晅偄偨傜偟偄丅庤尦偺ubuntu 13.04偱偼丄
> /lib/x86_64-linux-gnu/libc.so.6
GNU C Library (Ubuntu EGLIBC 2.17-0ubuntu5.1)
stable release version 2.17, by Roland McGrath
et al.
Copyright (C) 2012 Free Software Foundation,
Inc.
...
偲偺偙偲偱僟儊丅偱傕ubuntu忋偱僽儔僂僓巊偆偙偲偼傎傏側偄偐傜丄傾僢僾僨乕僩偟側偔偰傕傑偁偄偄傗丅
曗懌: 偙傟丄側偐側偐柺敀偄偺偩偗偳丄偙傟偩偗嬯楯偟偰峌寕曽朄傪曇傒弌偡庤娫傪偐偗傟偽丄傕偭偲怓乆偲峌寕曽朄偼尒偮偐傞條側婥傕丅偱傕丄"503 sender..." 傒偨偄側儊僢僙乕僕偭偰晛捠偼僸乕僾偱側偔偰.text偐.data僙僋僔儑儞偵抲偐傟傞偺偱偼丅(19:00捛婰)
-------------------------------------
暯惉27擭應埵峲朄妛夛慡崙戝夛 僙儈僫乕乽GNSS應埵擖栧偐傜RTKLIB偺妶梡傑偱乿, 暯惉27擭4寧22-23擔, 搶嫗奀梞戝妛 墇拞搰
惓幃捠抦偑弌傑偟偨丅怽偟崬傒曽朄偼埲忋傪嶲徠偔偩偝偄丅
幚廗傪拞怱偵偟偨2擔娫偺僐乕僗偱丄RTKLIB偺婎慴偐傜墳梡傑偱奐敪幰偑崸愗挌擩偵愢柧偟傑偡丅埲壓偺條側曽偼偤傂偛嶲壛偔偩偝偄丅側偍愢柧偼慡偰擔杮岅偱偡丅塸岅傪偛婓朷偺曽偼崱擭傕懡暘奐嵜偝傟傞僒儅乕僗僋乕儖偺曽偵偛嶲壛偔偩偝偄丅
丒GNSS應埵偺巇慻傒傗庴怣婡偺摦嶌尨棟傪堦偐傜妛廗偟偨偄丅
丒RTKLIB傪巊偭偰傒偨偄偗偳儅僯儏傾儖偑塸岅偱巊偄曽偑慡慠暘偐傜側偄丅
丒RTK傗PPP傪帺暘偺僔僗僥儉偵墳梡偟偨偄偗偳偳傫側峔惉偵偡傟偽傛偄偐嫵偊偰梸偟偄丅
丒RTKLIB傪僈僔僈僔偲夵憿偟偨偄偺偱僐乕僪偺撪晹峔憿偑偳偆側偭偰偄傞偐抦傝偨偄丅
丒RTKLIB偺摦嶌偑曄側偺偱奐敪幰偵暥嬪傪尵偄偨偄丅
...................................................................................................................................
擔杮抧媴榝惎壢妛楢崌2015擭戝夛, 2015擭5寧24乣28擔, 枊挘儊僢僙
M-TT05 New phase of GPS/GNSS application as an integrated earth observation system
楢崌戝夛偱偺GNSS偺抧媴娤應墳梡偵娭偡傞崙嵺僙僢僔儑儞丅搳峞掲傔愗傝2/18丅
...................................................................................................................................
撪妕晎, 塅拡婎杮寁夋, 暯惉27擭1寧9擔
4 (2)嘆i)偺敳悎丄
> 鶣乯塹惎應埵
> 丒弨揤捀塹惎弶崋婡乽傒偪傃偒乿偺愝寁庻柦偑摓棃偡傞暯惉32擭搙埲崀傕妋幚偵4婡懱惂傪堐帩偡傋偔丄暯惉27擭搙偐傜
> 傒偪傃偒屻宲婡偺専摙偵拝庤偡傞丅傑偨丄埨慡曐忈暘栰偱偺廳梫惈丄儐乕僓乕偺棙曋惈丄嶻嬈桿敪岠壥丄塣梡偺岠棪惈摍偵
> 學傞憤崌揑側専徹傪峴偄偮偮丄帩懕應埵偑壜擻偲側傞7婡懱惂偺妋棫偺偨傔偵昁梫偲側傞捛壛3婡偵偮偄偰偼丄暯惉29擭搙
> 傪傔偳偵奐敪偵拝庤偟丄暯惉35擭搙傪傔偳偵塣梡傪奐巒偡傞丅偦偺嵺丄奐敪丒塣梡僐僗僩偺弅尭偲暯弨壔傪恾傞丅偁傢偣偰丄
> 暷崙GPS偲偺楢実嫮壔偺嵼傝曽偵偮偄偰傕専摙傪峴偄丄昁梫側慬抲傪島偠傞丅乮撪妕晎乯
> 丒傑偨丄崙撪偺傒側傜偢丄傾僕傾懢暯梞傪拞怱偲偟偨彅奜崙偵偍偄偰丄弨揤捀塹惎偺棙妶梡傪懀恑偡傞偲偲傕偵丄偙偺抧堟
> 偵偍偗傞揹巕婎弨揰栐偺峔抸巟墖偵庢傝慻傒丄應埵塹惎偺棙梡婎斦傪嫮壔偡傞丅乮撪妕晎丄崙搚岎捠徣摍乯
杮暥拞偵乽弨揤捀塹惎偺7婡懱惂偺妋棫乿偲偄偆偺偑壗搙傕弌偰偔傞丅
岺掱昞偱偼乽捛壛3婡偺奐敪惍旛乿偑暯惉29-35擭搙丄乽7婡懱惂偺塣梡
(帩懕應埵)乿偑暯惉35擭搙偐傜丄偲側偭偰偄傞丅偁偲10擭埵偼巇帠偑偁傝偦偆偲偄偆姶偠丅桳擄偄偙偲偱偁傞丅
...................................................................................................................................
N.V.Rodriguez et al., When Assistance Becomes Dependence: Characterizing the Costs and Inefficiencies of A-GPS, ACM SIGMOBILE Mobile Computing and Communications Review, 2013
僗儅儂偺A-GPS偱敪惗偡傞捠怣偺夝愅傪峴偄丄惈擻偺斾妑昡壙傪偟偰偄傞丅僗儅儂偺A-GPS偼尰嵼傎傏 user-plane + MBS丄偡側傢偪丄IP僱僢僩儚乕僋宱桼僒乕僶偐傜傾僔僗僩忣曬傪庢摼偟丄抂枛帺恎偱應埵偡傞曽幃偲側偭偰偄傞丅傾僔僗僩忣曬偲偟偰偼丄僠僢僾僙僢僩偑Qualcomm偺応崌丄gpsOne (gpsOneXTRA)丄Broadcom偺応崌LTO傑偨偼Bcom-LS丅gpsOneXTRA媦傃LTO偺拞恎偼儀儞僟撈帺僼僅乕儅僢僩偱奿擺偝傟偨挿庻柦僄僼僃儊儕僗偱偁傞丅攝怣僾儘僩僐儖偼HTTP傑偨偼HTTPS偱丄iPhone偺応崌偼Apple偺僒乕僶丄偦傟埲奜偼Qualcomm丄Broadcom偺A-GPS僒乕僶偱採嫙偝傟傞丅Android偺応崌丄gpsOne埲奜偵Google偑採嫙偡傞OMA SUPL儀乕僗偺僒乕價僗偑巊梡偱偒傞丅TTFF丄應埵惛搙丄揹椡埲奜偵丄捠怣検偺斾妑傕偟偰偄傞偑丄gpsOne偲LTO偺応崌丄1擔摉偨傝栺40KB丅僄僼僃儊儕僗埲奜偵NTP摨婜傕昁梫偱丄僱僢僩儚乕僋儗僀僥儞僔偑戝偒偄応崌徚旓揹椡偵僀儞僷僋僩偑偁傞偲偺偙偲丅
幚嵺丄http://xtra3.gpsonextra.net/xtra.bin偐傜丄Qualcomm偺挿庻柦僄僼僃儊儕僗 (xtra.bin) 傪僟僂儞儘乕僪偡傞偙偲偑偱偒傞丅僒僀僘偼38KB丅挷傋偨尷傝僼僅乕儅僢僩偼岞奐偝傟偰偄側偄丅
曗懌: SUPL (secure user plane location) 偵偮偄偰偼Broadcom偺white paper偑暘偐傝傗偡偄偺偱屻偱挷傋傞偨傔偵揬偭偰偍偔丅偟偐偟A-GPS偭偰抂枛悢偱尵偊偽悽奅拞偵婛偵壗廫壄偲偄偆儐乕僓偑偄傞栿偱丄塹惎應埵偺僄儞僕僯傾偑婎慴抦幆傪帩偭偰側偄偺偼傑偢偄傛偹丅(1/25捛婰)
嵞曗懌: A-GPS丅偲偄偆偙偲偱丄桳柤側杮側傫偩偗偳丄Broadcom偺尰GNSS奐敪愑擟幰偱傕偁傞Diggelen偺嶲峫彂儕儞僋傪揬偭偰偍偔丅偙偺婰帠撉傓偲撿傾僼儕僇弌恎傜偟偄丅ION偱堦搙夛偭偨偙偲偑偁傞偗偳彫暱偱鉟楉側嬧敮偺恖偩偭偨丅杮傪撉傔偽暘偐傞條偵丄旕忢偵摢偺愗傟傞恖偱偁傞偙偲偼娫堘偄側偄丅(1/25捛婰)
-------------------------------------
I.F.Hernandez et al., Galileo's Commercial Service Testing GNSS High Accuracy and Authentication, InsideGNSS, 2014
Galileo CS (commercial service) 偺徻嵶偲AALECS (authentic and accurate location experimantatin with CS) 偺EPOC (early proof-of-concept) 偲屇傇憗婜専徹幚尡偺寢壥丅PPP梡偵HA (high accuracy) 448bps偺懷堟傪偳偆巊偆偺偐嫽枴偑偁偭偨偺偩偑丄塹惎枅偺婳摴僋儘僢僋 (160bit=SVID(6)+Epoch(17)+X/Y/Z(33x3)+Clock(38) 傪5昩枅8塹惎暘傑偨偼30昩枅48塹惎暘憲傟傞條偩丅EPOC偱偼懳徾塹惎偼GPS亊32+3Galileo亊3偱30昩枅偱慡塹惎偐傜摨堦儊僢僙乕僕傪憲怣偟偰偄傞丅DCB傗PPP-AR梡埵憡僶僀傾僗偼娷傑傟偰偄側偄丅傾僢僾儕儞僋嬊偼5嬊丅
嬊忈奞傕峫偊傞偲5嬊偱懌傝傞偺偐怱攝偩偑丄慡塹惎摨堦儊僢僙乕僕傪憲傞偺偱偁傟偽丄1偮偱傕桳岠塹惎偑壜帇側傜OK偲偄偆愝寁側偺偐傕偟傟側偄丅偨偩傗偼傝MEO塹惎偼丄GEO傗IGSO偵斾妑偟偰儕傾儖僞僀儉偺曗嫮忣曬憲怣偵偼晄棙偱偁傞丅MEO塹惎偺応崌夞慄偺桳岠妶梡偺偨傔偵偼堎側傞塹惎偐傜堎側傞忣曬傪憲傞摿暿側憲怣僗働僕儏乕儕儞僌偑昁梫偩偲巚偆 (彮側偔偲傕抧媴棤懁偵偄傞塹惎偺曗嫮忣曬傪憲傞偺偼懷堟偺柍懯側偺偱)丅
...................................................................................................................................
Amazon Web Service, New Compute-Optimized EC2 Instances
AWS EC2偺怴偟偄僀儞僗僞儞僗僼傽儈儕乕C4偑巊偊傞傛偆偵側偭偨傛偆偩丅埲壓C3偲偺斾妑丅偦傟偧傟堦斣戝偒側c3.8xlarge偲c4.8xlarge丅
| Instance Type | #vCPU | RAM | SSD | EBS opt. | Physical CPU | Price |
| c3.8xlarge | 32 | 60 GB | 2 x 80 GB | No | Xeon E5-2680 v2 (2.8-3.6GHz) | $1.680/H |
| c4.8xlarge | 36 | 60 GB | - | Yes | Xeon E5-2666 v3 (2.9-3.5GHz) | $1.856/H |
椏嬥偼僆儞僨儅儞僪, 暷崙惣晹僆儗僑儞, Linux丅CPU偑Haswell偵側偭偰AVX2偑巊偊傞條偵側偭偨偺偑嵟戝偺儊儕僢僩丅偨偩暔棟僐傾悢偼曄傢偭偰偄側偄傕16->18偵憹偊偰偄傞丅E5-2666 v3偲偄偆偺偼偳偆傕AWS梡偺摿暿偺CPU傜偟偔Intel偺僾儘僙僢僒儕僗僩偵偼嵹偭偰偄側偄丅EBS嵟揔壔偑昗弨偱晅偔傛偆偵側偭偨戙傢傝SSD偑側偔側偭偰偟傑偭偨丅
偲偄偆偙偲偱丄偪傚偭偲帋偟偵僗億僢僩偱巊偭偰傒偨傫偩偗偳丄C3偵斾妑偟偰懍偔側傜側偄側偁丅峴楍墘嶼儀儞僠儅乕僋傕Core
i7 5960X (OC) 偲傎傏僐儞僷儔偱丄400GFLOP埵偼弌傞偗偳丄1618僐傾偺壎宐偼柍偄傛偆偵尒偊傞丅幚AP偱傕傓偟傠抶偔側偭偰偟傑偭偰偄傞丅僗億僢僩壙奿傕棎崅壓偟偰偄偰丄僔儍僢僩僟僂儞怘傜偆儕僗僋傕崅偄偺偱丄摉柺條巕尒丅奆C4偵棳傟偰C3偺僗億僢僩壙奿偑埨偔側傞偙偲傪婜懸丅
曗懌: 怓乆偲挷傋傞偲E5-2666 v3偺僐傾悢偼18 (9x2) 偺條丅E5-2680 v2偼16 (8x2) 側偺偱暔棟僐傾悢偼憹偊偰偄傞丅婰弎掶惓丅偦傟偵偟偰偼惈擻偼偁傫傑傝忋偑偭偰偄側偄丅(1/25捛婰)
...................................................................................................................................
NEO-6T偺僪儞僌儖偑$49.99丅偙傟偼埨偄丅(CSG Shop偺LEA-6T僇乕僪偱傕$149.99偩偟) u-center傗RTKLIB偲偺慻傒崌傢偣偱怓乆偲梀傃偨偄恖偼偳偆偧丅
...................................................................................................................................
GPS World, Six Galileo Satellites Planned for 2015 Launch, January 19, 2015
崱擭偺Galileo塹惎偺懪偪忋偘偼Soyuz偵傛傞2婡偲Ariane 5偵傛傞4婡偺寁6婡偺條偩丅
...................................................................................................................................
GMV, First Galileo-only PPP with IOV + FOC-1 satellite, December 11, 2014
GMV magic GNSS偺僽儘僌側傫偩偗偳丄Galileo FOC-1塹惎 (E18) 傪娷傫偩Galileo偺婳摴/僋儘僢僋傗Galileo only PPP偺昡壙傪偟偰偄傞丅96H arc悇掕偺24H orbit overlap偱radial 2-4 cm, arong/cross 6-16 cm丅3D姺嶼偱7-20 cm丅偝偡偑偵E18偼懠偵斾妑偟偰彮偟埆偄丅MGEX 峲朄僨乕僞傾乕僇僀僽尒偰傕E18偺峲朄僨乕僞偼娷傑傟偰偄側偄偺偱丄傑偩塹惎偐傜僄僼僃儊儕僗偼曻憲偝傟偰偄側偄偲巚偆偺偩偗偳婳摴弶婜抣偼偳偆偟偰偄傞偺偩傠偆丅
-------------------------------------
Sparkfun, Intel Edison
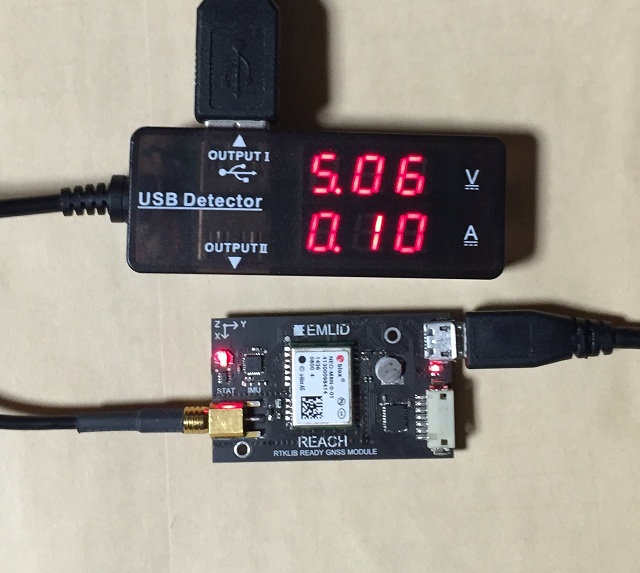
Sparkfun偱攧偭偰傞Intel Edison梡偺僪乕僞儃乕僪側傫偩偗偳丄Hirose偺70P僐僱僋僞宱桼偱僗僞僢僉儞僌偱偒傞 (嶲徠) 偺偱奼挘偑娙扨丅Reach傕偱偒傟偽MicroSD偑梸偟偄姶偠丅
...................................................................................................................................
Reach + Edison偺徚旓揹椡傪應傞丅RTKRCV傪幚峴偝偣偨忬懺 (WiFi ON) 偱0.10乣0.16A丄暯嬒0.14A (5V)丅Edison偺僨乕僞僔乕僩偵傛傞偲揹尮偼3.3-4.5V偱丄u-blox傕3.0-3.6V側偺偱丄3.7V 1000mAh偺儕億僶僢僥儕偱6-7帪娫偼摦偒偦偆丅
曗懌: NAVIO + RasPi: 0.38乣0.39A (5V)丅(22:31捛婰)
...................................................................................................................................
暯惉27擭搙應埵峲朄妛夛慡崙戝夛 僙儈僫乕, 暯惉27擭4寧22-23擔, 搶嫗奀梞戝妛墇拞搰
惓幃傾僫僂儞僗偼傑偩偱偡偑丄埲壓僙儈僫乕傪奐嵜偟傑偡丅
僞僀僩儖:
GNSS應埵擖栧偐傜RTKLIB偺妶梡傑偱
僾儘僌儔儉:
4/22 (悈) 9:30-12:30
(1) GNSS應埵擖栧
(2) RTKLIB偺奣梫偲摫擖 (幚廗)
(3) RTKLIB偺婎杮憖嶌 (幚廗)
4/22 (悈) 13:30-16:30
(3) GNSS應埵偺婎慴
(4) RTKPLOT偺婎杮憖嶌 (幚廗)
(5) RTKPOST偵傛傞扨撈應埵 (幚廗)
4/23 (栘) 9:30-12:30
(6) 婎慄夝愅偲RTK偺婎慴
(7) RTKPOST偵傛傞婎慄夝愅 (幚廗)
(8) RTKNAVI偵傛傞RTK (幚廗)
4/23 (栘) 13:30-16:30
(9) RTK偺墳梡
(10) RTKLIB偵傛傞暋崌夝愅 (幚廗)
(11) RTKLIB偺妶梡
庡側懳徾幰偼塹惎應埵傗RTKLIB偺弶怱幰偲偟丄2擔娫偺僐乕僗偱RTKLIB偺婎杮憖嶌偐傜杮奿揑側墳梡傑偱丄幚廗傪拞怱偵妛廗偟傑偡丅
僙儈僫乕偺怽偟崬傒曽朄偵偮偄偰偼丄崱屻峏怴偝傟傞應埵峲朄妛夛偺Web僒僀僩傪嶲徠偔偩偝偄丅 妛夛堳埲奜偺嶲壛傕娊寎偱偡丅
...................................................................................................................................
埲壓庤弴偱ATLAS偲LAPACK偺儔僀僽儔儕偼弌棃偨 (1擔敿埵偐偐偭偨) 偺偩偗偳丄Edison傪嵞婲摦偟偨傜丄僼傽僀儖僔僗僥儉儅僂儞僩幐攕偱OS偑婲摦偟側偔側偭偰偟傑偭偨丅巇曽側偄偺偱儕僇僶儕丅OS偑忋偑傜側偄帪偺儕僇僶儕曽朄儊儌丅
(1) 埲壓暸偐傜嵟怴F/W偲Windows梡僪儔僀僶傪僟僂儞儘乕僪丅崱夞偼Edison Yocto complete image偲Windows Driver setup丅
https://communities.intel.com/docs/DOC-23242
(2) Windows偵Driver傪僀儞僗僩乕儖屻丄Edison偺USB-OTB僐僱僋僞傪PC偵宷偖偲丄Edison偼僔儕傾儖僨僶僀僗媦傃僗僩儗乕僕僨僶僀僗偲偟偰擣幆偝傟傞丅側偍偙偺僔儕傾儖僨僶僀僗偼僐儞僜乕儖梡偲偟偰偼棙梡偱偒側偄條丅
(3) 埲壓偐傜F/W彂偒崬傒僣乕儖 DFU-UTIL傪僟僂儞儘乕僪丅偙偙偱偼價儖僪嵪傒偺Windows梡僶僀僫儕dfu-util-static.exe傪巊偭偨丅
http://dfu-util.sourceforge.net/releases/dfu-util-0.8-binaries/win32-mingw32/
(4) (1) 偺complete image傪夝搥偟丄摨堦僨傿儗僋僩儕偵dfu-util.exe偵儕僱乕儉偟偰 (3) 傪奿擺丅
(5) 僐儅儞僪僾儘儞僾僩傪婲摦偟 (4) 偺僨傿儗僋僩儕偵堏摦丅偄偭偨傫USB働乕僽儖傪敳偄偰埲壓僶僢僠僼傽僀儖幚峴丅
E:\> cd edison-image-rel1-maint-rel1ww42-14
E:\edison-image-rel1-maint-rel1ww42-14>
flashall.bat
(6) USB働乕僽儖傪嵞搙巋偡偲擣幆偝傟偰丄F/W彂偒崬傒偑巒傑傞丅彂偒崬傫偩屻丄2夞嵞婲摦偑偐偐傞條側偺偱偟偽傜偔曻偭偰偍偔丅
偳偆偄偆働乕僗偱僼傽僀儖僔僗僥儉偑夡傟傞偺偐椙偔暘偐傜側偄偺偩偗偳丄shutdown偟側偄偱揹尮傪敳偔偲夡傟傞偙偲偑懡偄婥偑偡傞丅偁偲丄opkg upgrade傪偡傞偲堦晹僼傽僀儖僔僗僥儉偑僼儖偵側傞偺偱偙傟傕埆偄偐傕丅opkg upgrade偟側偄偱丄偐偮揹尮愗抐慜偵昁偢shutdown僐儅儞僪傪幚峴偡傞條偵偟偰偐傜偼夡傟偰偄側偄丅儕僇僶儕偡傞偲丄僼傽僀儖僔僗僥儉偼弶婜壔偝傟偰偟傑偆偺偱偣偭偐偔1擔敿偐偐偭偰嶌偭偨儔僀僽儔儕偼僷乕丅傕偆堦搙嶌傞婥偵偼側傜側偄偺偱傕偆偄偄傗丅
偮偄偱側偺偱丄Edison僐儞僜乕儖傊偺愙懕偺曽朄偩偗偳埲壓偺3庬椶偁傞丅
(a) FTDI USB僔儕傾儖宱桼愙懕 (梫breakout儃乕僪)
(b) WiFi宱桼SSH愙懕
(c) USB-OTG偺USB-LAN宱桼SSH愙懕
(c) 偼Edison偺USB-OTG僐僱僋僞傪Windows偵愙懕偡傞偲丄RNDIS僨僶僀僗偲偟偰傕擣幆偝傟傞偺偱丄僨僶僀僗偺IP傾僪儗僗傪192.168.2.2摍偵愝掕屻丄傾僪儗僗192.168.2.15偵putty摍偱SSH愙懕偱偒傞丅側偍 (b)(c) 偼OS偑忋偑傜側偄偲巊偊側偄偺偱丄OS儕僇僶儕帪偵偼寢嬊 (a) 偟偐巊偊側偄丅Reach偵偼USB僔儕傾儖偑晅偄偰偄側偄偺偱丄巇曽側偄偺偱OS儕僇僶儕帪偵偼丄Edison傪堦乆breakout儃乕僪偵嵎偟懼偊偰偄傞丅
-------------------------------------
偣偭偐偔側偺偱丄Intel Edison偱rtkrcv傪崅懍壔偟偨偄偲巚偭偰丄ATLAS傪Intel Edison忋偱價儖僪偟偰傒偨丅埲壓儊儌丅
# mkdir /home/root/local
# ln -s /home/root/local /usr/local
# mkdir /usr/local/bin /usr/local/lib /usr/local/include
# opkg install gfortran
# opkg install libgfortran-dev
# cd /usr/bin
# ln -s i586-poky-linux-gfortran gfortran
# cd
# wget http://downloads.sourceforge.net/project/math-atlas/Stable/3.10.2/atlas3.10.2.tar.bz2
# wget http://www.netlib.org/lapack/lapack-3.5.0.tgz
# tar jxvf atlas3.10.2.tar.bz2
# mkdir ATLAS/build
# cd ATLAS/build
# ../configure --prefix=/usr/local --with-netlib-lapack-tarfile=/home/root/lapack-3.5.0.tgz
--shared -v 2
...
# make build
...
# make install
價儖僪偼嫲傠偟偔帪娫偑偐偐傞偺偱曻偭偰偍偔丅
...................................................................................................................................
EMLID, Reach High accuracy L1 RTK GNSS, Coming soon
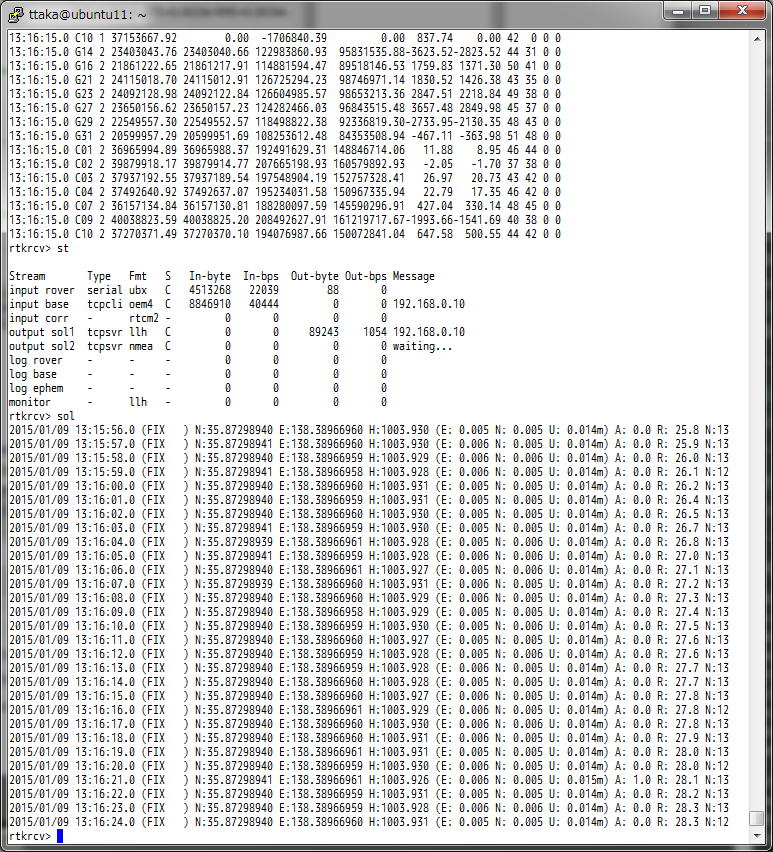
EMLID偺Mikhail偐傜Reach偲屇傇丄Intel Edison儀乕僗偺挻彫宆RTK儌僕儏乕儖偺帋嶌昳傪憲偭偰傕傜偭偨偺偱丄RTKRCV傪億乕僩偟偰摦嶌帋尡丅GNSS儌僕儏乕儖偼NEO-M8N側偺偱晛捠偵RTK偑摦偔丅偨偩偟M8N側偺偱1Hz傑偱偱丄GLO偲BDS偺傾儞價僊儏僀僥傿偼夝偗側偄丅GPS+GLO 1Hz RTK偱Edison偺CPU晧壸2%埵丅NEO-M8T偺惓幃斉偑弌傟偽偦傟偵抲偒姺偊偰5Hz傑偱偺RTK偱BDS偺傾儞價僊儏僀僥傿傕栤戣側偔夝偗傞偼偢丅偨偩丄RTKRCV偺僐乕僪彂偄偨偺偑偢偄傇傫慜側偺偱崱堦偮憖嶌惈偑埆偄丅傕偆彮偟巊偄傗偡偔偡傞偺偲GNSS/INS摑崌傕偪傖傫偲擖傟偰彂偒捈偟偨偄側偁丅
-------------------------------------
崙搚抧棟堾, 儅儖僠GNSS夝愅僜僼僩僂僃傾乽GSILIB乿偺岞奐, 2015擭1寧8擔
GSILIB ver.1.0.0偺岞奐丅GLONASS IFB悇掕梡AP偱偁傞ANTApp偑娷傑傟偰偄傞丅
-------------------------------------
GPS World, The Almanac, January 2015
奺GNSS塹惎偺僗僥乕僞僗傗忣曬儕儞僋丅偲偰傕暘偐傝傗偡偄丅偙傟丄寁夋掆巭傕娷傔偰扤偐宲懕揑偵儊儞僥僫儞僗偟偰偔傟傞偲偆傟偟偄側偁丅
-------------------------------------
GLONASS偺偆傞偆昩懳墳偵偮偄偰彮偟ICD傪挷傋偰傒傞丅(GLONASS ICD ver.5.1, 3.3.3)
> The GLONASS users are notified in advance
(at least three months before) on these planned
corrections through relevant bulletins,
> notifications etc. The GLONASS satellites
have not any data concerning the UTC leap
second correction within their navigation
>messages. Navigation message of GLONASS-M
satellites stipulates provision of advance
notice for users on forthcoming UTC leap
> second correction, its value and sign
(see Section 4.5, word KP within almanac).
> Along with UTC corrections as stipulated
by BIH/BIMP recommendations the GLONASS time
corrections are performed through
> appropriate change of enumeration of
second impulses sequence of all the GLONASS
on-board clocks.
> Time marker of the GLONASS frame string
(broadcast every 2 seconds) change its place
(on continuous time scale) to ensure
> synchronization with 2-second epoch
of UTC corrected scale. This change takes
place at midnight sharp UTC. General
> recommendations concerning operation
of GLONASS receiver upon the UTC leap second
correction are given in Appendix 2.
偲偄偆偙偲偱丄GLONASS-M偺応崌丄偆傞偆昩偼Almanac偺KP僼傿乕儖僪偱捠抦偝傟傞丅偨偩 "Time marker of the GLONASS frame string ...change its place (on continuous time scale)" 偲偄偆偺偼堄枴偑椙偔暘偐傜側偄丅(峲朄僨乕僞僼儗乕儉偼UTC偵摨婜偟偰2昩枅側偺偱丄偆傞偆昩憓擖帪偵偼扨弮偵1昩暘偺柍岠僼儗乕儉偑憓擖偝傟傞偺偐側)丅傑偨丄Appendix 2偵庴怣婡偵偍偗傞偆傞偆昩曗惓曽朄偺姪崘偑帵偝傟偰偄傞偺偩偗偳丄偙傟傕堦捠傝撉傫偩偩偗偱偼棟夝偑擄偟偄丅庴怣婡偵傛偭偰夝庍偑堎側傞壜擻惈偑偁傞偺偱丄傗偼傝幚嵺偺幚憰偑偳偆側偭偰偄傞偐妋擣偑昁梫偦偆偩丅
-------------------------------------
嶳杮 懠, 嶰師尦楬慄儅僢僾傪棙梡偟偨塹惎應埵偵傛傞楍幵埵抲寁應, 揝摴憤尋曬崘, 2014擭11寧崋 (戞28姫戞11崋)
GNSS偺揝摴墳梡丅揝摴偼GNSS偺崱屻偺廳梫側墳梡暘栰偺堦偮側偺偱婱廳側尋媶偩偲巚偆丅忦審偺埆偄娐嫬偱偺崅怣棅壔媄弍偲偄偆娤揰偱彨棃偺帺摦塣揮摍偵堦晹偼墳揔梡壜擻偐傕丅
...................................................................................................................................
IERS, Bulletin C 49, January 5, 2015
2015/06/30 23:59:59 UTC偺屻偵偆傞偆昩憓擖丅3擭傇傝丅偆傞偆昩棈傒偺怓乆側僔僗僥儉帋尡偺婡夛偼側偐側偐側偄偺偱丄僔僗僥儉壆偝傫偼崱偺偆偪偐傜弨旛傪偟偰偍偄偨曽偑椙偄偩傠偆丅偲偙傠偱丄傑偩偆傞偆昩柍偔側傜側偄偺偹丅
曗懌: GLONASS懳墳庴怣婡偑偆傞偆昩偱偳偆偄偆嫇摦傪帵偡偺偐嫽枴偼帩偭偰偄偨偺偩偗偳2012擭偼挷傋傞偺傪朰傟偨丅崱擭偼朰傟偢偵挷傋傞偙偲偵偟傛偆丅(23:03捛婰)
...................................................................................................................................
S. Carcanague, Low-cost GPS/GLONASS Precise Positioning Algorithm in Constrained Environment, 2013
暓僩僁乕儖乕僘崙棫棟岺壢妛堾偺妛惗偝傫偺攷巑榑暥傜偟偄偺偩偗偳丄僥乕儅揑偵夁嫀傗偭偰偒偨偙偲偲偐側傝旐傞偺偱揬偭偰偍偔丅
-------------------------------------
嶐擭11寧埵偐傜昁梫偁偭偰AWS EC2偱寢峔戝偒側夝愅傪壗搙傕孞傝曉偟棳偡嶌嬈傪偟偰偄傞栿偩偑丄怓乆偲僲僂僴僂偑偨傑偭偰偒偨偺偱埲壓妎彂傪寭偹偰丄棙梡曽朄傪傑偲傔偰偍偔丅
(1) 巊偭偰偄傞僒乕價僗偼丄EC2偱僼傽僀儖僒乕僶梡偵c3.xlarge
(僆儞僨儅儞僪+EBS嵟揔壔, vCPUx4, RAM 7.5GB)丄夝愅僒乕僶梡偵
c3.x8large (僗億僢僩, vCPUx32, RAM 60GB)
亊 20丅EBS 300GB (Magnetic volumes)丅AMI偼Ubuntu
Server 14.04 LTS (HVM)丅AZ偼us-west-2b (暷崙惣晹僆儗僑儞)
丅椏嬥偼偙偙嶲徠丅
(2) 僼傽僀儖僒乕僶偵偼夝愅梡AP偲擖椡媦傃寢壥僨乕僞偑奿擺偝傟偰偄傞丅庤尦偺AP奐敪娐嫬
(ubuntu) 偐傜偺AP偲擖椡僨乕僞偺傾僢僾儘乕僪丄寢壥僨乕僞偺僟僂儞儘乕僪偵偼AWS
CLI偲rsync傪慻傒崌傢偣偨僗僋儕僾僩傪慻傫偱偄傞丅
(3) 巊梡偡傞応崌丄AWS web僀儞僞僼僃乕僗傪巊偭偰丄僼傽僀儖僒乕僶僀儞僗僞儞僗傪奐巒偡傞丅傑偨丄夝愅僒乕僶梡僗億僢僩僀儞僗僞儞僗傪20屄惗惉偡傞丅
(4) web僀儞僞僼僃乕僗偱丄僗億僢僩梫媮偑庴偗晅偗傜傟偰僀儞僗僞儞僗偺status
checks偑2/2 checks passed偵側傞偺傪妋擣丅戝懱5暘埵偐偐傞丅妋擣屻庤尦ubuntu偐傜僼傽僀儖僒乕僶偵SSH儘僌僀儞丅偙偺偨傔偵丄AWS
CLI偱僒乕僶専嶕偟偰儘僌僀儞偡傞偨傔偺僗僋儕僾僩傪慻傫偱偄傞丅SSH梡埫崋壔僉乕偼~/.ssh偵帠慜偵奿擺丅(connect.sh)
(5) 僼傽僀儖僒乕僶偵儘僌僀儞偟偨傜丄夝愅僒乕僶偺僙僢僩傾僢僾梡僗僋儕僾僩傪幚峴丅僙僢僩傾僢僾梡僗僋儕僾僩偱偼棙梡壜擻側僗億僢僩僀儞僗僞儞僗傪AWS
CLI偱専嶕偟偰丄(a) SCP偱SSH埫崋壔僉乕傪儕儌乕僩僐僺乕丄(b)
嶌嬈僨傿儗僋僩儕惗惉丄(c) apt-get update丄(d)
apt-get install gfortran, sshfs丄(e) sshfs偱僼傽僀儖僒乕僶偺昁梫僨傿儗僋僩儕傪儅僂儞僩丄傪峴偆丅偙偺幚峴偵2乣3暘丅(setup.sh)
(6) 夝愅僕儑僽傪夝愅僒乕僶偱暲峴搳擖偡傞僗僋儕僾僩傪幚峴丅偙偺僗僋儕僾僩偱偼堷悢傪曄偊偰夝愅AP傪SSH幚峴偡傞丅尰嵼偺偲偙傠丄1僀儞僗僞儞僗偁偨傝嵟戝5僾儘僙僗暲楍幚峴偡傞條偵偟偰偄傞偺偱丄嵟戝100暲楍幚峴偝傟傞丅(execx.sh, execp.sh, svrlist.sh)
(7) 夝愅偑廔椆偡傞偲丄僼傽僀儖僒乕僶偺寢壥僨傿儗僋僩儕偵夝愅寢壥偑偨傑傞偺偱丄偙傟傪庤尦ubuntu偺寢壥僨傿儗僋僩儕偵掕婜揑偵rsync偱僟僂儞儘乕僪偡傞丅(downebs.sh)
(8) 慡晹廔傢偭偨傜慡僗億僢僩僀儞僗僞儞僗傪terminate偡傞僗僋儕僾僩傪幚峴丅僼傽僀儖僒乕僶傕sudo
shutdown -h now偱stop丅web僀儞僞僼僃乕僗偱廔椆傪妋擣丅
埲忋偱棳偟偰偄傞偺偼朸AP偵傛傞栺2擭暘偺朸GNSS塹惎婳摴寛掕栤戣側偺偩偑丄嵟弶偺偆偪偼慡晹偱4-5帪娫偼偐偐偭偰偄偨丅尰嵼偼慡晹偱1帪娫埲撪丄CPU棙梡岠棪傕75-80%偼弌偰偄傞丅棙梡椏嬥偼僼傽僀儖僒乕僶 $0.23/H丄夝愅僒乕僶 $0.3乣0.4/H亊20=$6乣8/H丄EBS $15/month丅 嶲峫偺偨傔埲忋偱巊偭偰偄傞僗僋儕僾僩傕彮偟撪梕曄偊偰傾僢僾偟偰偍偔丅
曗懌: 100暲楍偱摦偐偡偲僼傽僀儖僒乕僶偑儃僩儖僱僢僋偵側傝偦偆偩偑丄崱偺偲偙傠CPU晧壸偼50%掱搙偱偁傞丅偨偩僼傽僀儖傾僋僙僗晧壸傪壓偘傞偨傔偵丄帠慜偵擖椡僨乕僞 (RINEX) 偐傜CONVBIN傪巊偭偰夝愅偵昁梫側僨乕僞僞僀僾偺傒拪弌偟偰偄傞丅偙傟偼慡懱偺幚峴帪娫嶍尭偵偐側傝岠偄偰偄傞丅偲偄偆偐RINEX奿擺岠棪掅偡偓偱丄戝婯柾夝愅偺儃僩儖僱僢僋偵側偭偰偄傞丅(11:23捛婰)
嵞曗懌: StarCluster丅AWS忋偺僋儔僗僞寁嶼梡僣乕儖僉僢僩丅偙傟傪巊偊偽偍側偠條側偙偲偑娙扨偵偱偒傞偐傕丅(17:37捛婰)
...................................................................................................................................
怴擭柧偗傑偟偰偍傔偱偲偆偛偞偄傑偡丅崱擭傕堦擭偛垽屭傪丅
...................................................................................................................................
| Home | by T.Takasu |