
|
日記・備考録 |
2005 |
2006 |
2007 |
2008 |
2009 |
2010 |
2011 |
2012 |
2013 |
2014 |
2015 |
2016/
1
2
3
4
5
6
7
8
9
10
11
12 |
2017 Search |
| January | February 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 |
March | Home |
...................................................................................................................................
豪州の会社らしいのだが面白そうな機器を扱っている。超小型INS/GNSSとか0.4度/HのMEMS IMUとか後処理INS解析ソフトとか。SPATIAL EVKが日本円で\30万位。データシートによるとSpatialのGNSSはu-blox M8とのことである。これは教えて貰った。
補足: SPATIAL面白そうだなあ。最大1KHz出力で、0.2度で角度が取れて、NovAtelやTrimbleの入力もできるみたい。ジャイロは3度/Hクラスで地磁気センサや気圧計も付いて、サイズが3cm角。\30万か。自制、自制。(19:00追記)
-------------------------------------
u-blox社M8Pの説明会に参加。参加前にNDAに署名した気がするので細かくは書けないが、次のu-bloxも面白そうである。
...................................................................................................................................
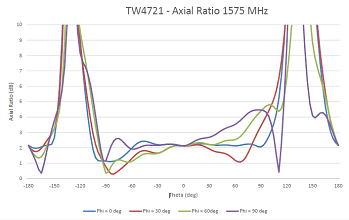
某所でTW2400とTW4721のRTK性能差に関する質問があったので。Tallysmanの公開している両アンテナ (TW2400は製造中止みたいなので代わりにTW2410) の性能データから軸比とゲインを以下に。
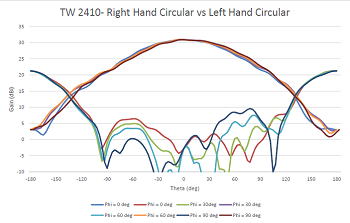
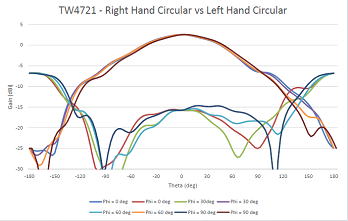
left: TW2410, right: TW4721, upper: axis
ratio, lower: antenna gain (GPS L1)
(http://www.tallysman.com)
TW2410に比較してTW4721は、軸比が大きいし、ゲインも低い。さらに右旋と左旋のゲイン差が、TW2410は天頂で30dBはあるのに、TW2410は18dBしかない。マルチパス抑制性能に結構差があるというのが予測。
...................................................................................................................................
IEEE ComSoc Technology News, Lost in space: How secure is the future of mobile positioning?, February, 2016
海老沼先生も大変だな。DeCSSみたいなクラックツールと似たような事例とは言えるが、GNSSは既にインフラなので社会的影響はより大きいかも。DeCSSは訴訟になって、結局開発者は無罪になったみたいだけど、こんなのに巻き込まれただけでたまったものじゃない。ということでgps-sdr-simは公開停止になってしまうかもしれないので、興味のある方は今のうちにダウンロードを。
補足: spoofingのデモとかやっていると、万が一裁判になった時にセキュリティ侵害の意図があったとされる可能性があるので、慎重に。まあ、研究者も社会との関わりを0にはできないので、自分の研究成果が悪用される危険性について自覚的になる必要はあると思う。(17:40追記)
再補足: GNSSのvulnerabilityって世界的には以前から問題になっている訳で、spoofingの危険性を明らかにするための啓蒙活動として、意図的にコードを公開しているという可能性もある。あんまり深く考えていないのかもしれないけど。私もRTKLIBを最初に公開した際は、各所からクレームこないかとか少し緊張していたのだけど、公開してみたら全然反応なくて、がっくりきた覚えがある。(17:57追記)
再々補足: RTKLIBのコード公開は、精密測位技術のコスト低下を目的に「意図的に」行ったということ。念のため。(19:58追加)
...................................................................................................................................
Matt Stancliff, 2016年、C言語はどう書くべきか (前篇)
Matt Stancliff, 2016年、C言語はどう書くべきか (後篇)
> C言語の第1のルールは「もし避けられるのならC言語を使うな」ということです。
書いてあることは大体もっともは思うけど、新しい規格に沿って書くと結局動かない環境が残るので、可搬性を重視するとC89/90準拠となってしまうのよね。ところで={0}で構造体のパディング部は初期化されないって初めて知った。(個人的には、コードにmemset(a,0,sizeof(a)); って書かれているとそれだけで捨てたくなるのだけど)
補足: memset()による初期化はNULLの内部表現が0でない環境や浮動小数点形式がIEEE754でない場合に想定外動作となるので避けるべきとされている。現実にはもうこんな環境ほぼないのだけど意識低いなあと思ってうんざりしてしまうので。ところでcalloc()ってメモリ0クリアなので同じ問題がありそうな気が。もしかすると新しい規格で仕様変わった? (22:31追記)
...................................................................................................................................
Tersus PRECIS-L1L2について状況報告。進捗があったらまた報告予定。単なるネタにしては高かった様な気が。
(1) 2015/12/15 発注。
(2) 2015/12/25 商品届く。
(3) 2015/12/30 問題について問い合わせメール。特に致命的な問題はL2,
B3が受信しないこと。幾つかの明らかなF/Wバグ。
(4) 2016/01/17 回答督促。
(5) 2016/01/18 ライセンス問題なのでAUTHCODE適用してよとの回答。適用したが今度はエラーメッセージが出てRTCMや生データも出力不能に。再問い合わせ。調査中との回答。
(6) 2016/02/08 回答督促。
(7) 2016/02/14 R&Dチームがバケーションから帰ってきて調査中と回答。
以降、2016/02/19現在、音沙汰なし。
補足: 続き。(5/9追記)
-------------------------------------
昨年12/17に打ち上げられたGalileo E08の信号を確認。エフェメリスはまだ放送していない。
補足: E09の信号も確認。エフェメリスは放送していない。あと2/4に打ち上げられたGPS G32の信号も確認。(2/20追記)
...................................................................................................................................
u-blox M8P RTKモジュールが70mWとして、通信はXbeeで92mW (受信) + 11mW (送信, デューティ1/10)、コントローラ50mWで計223mW。15Whバッテリで駆動3日弱。2Wクラスの太陽電池パネルを組み合わせて15cm角位の防水ケースに入れて、構造物の精密変位監視端末はどうだろう。電源とれる基地局に携帯回線付けて、データはそこから遠隔で吸い上げる。視程があればXbee 1.2km位飛ぶみたいだし。
補足: 良く考えたら、この場合別に端末側でRTK処理しなくても良い様な。端末側は送信だけにすれば受信電力は落とせるし1/10の間欠送信にしてもRTK性能落ちない。RTKは基地局側で処理すれば良い。そうすると端末はM8Tを使えて、バッテリも太陽電池も半分にはできるから、端末1台\2万以下でできそうだな。端末20台で1式50万以下。これ誰か製品化しません。(古野のDANA2000は似た様な構成のはずだけど) (15:15追記)
...................................................................................................................................
u-blox, NEO-M8P
噂のRTK対応u-blox NEO-M8Pである。ニュースリリース。これは教えて貰った。
補足: プロダクトサマリ。モジュールはローバ用と基準局用のM8P-0とM8P-2があり、通信プロトコルはRTCM。サポートする衛星系はGPS/QZSSとGLONASSで、GalileoとBeiDouは対象外。最大RTK更新レートは5Hz、ただし初期サンプルは2Hz。"survey-in" と呼ぶ基準局位置をサブメータ精度で求める機能が付く。精度は10km以下基線で2.5cm+1ppm CEP、収束時間は3分。感度は-160dBm。消費電力は23mA@3V (GPSのみ)。(2/16追記)
再補足: RTKのカタログ精度は1cm+1ppm RMSとしている受信機が多い。この値は、普通水平誤差で垂直は概ねこの倍。CEPは50%誤差円半径なので、RMS換算には1.2をかける (参照)。ただRTK性能はアンテナに大きく依存するので上記精度の前提は良く分からない。感度が-160dBmとあるが、C/N0換算で15dBHz位なので、流石にこれはsingleモードと思われる (PLLロックには普通25dBHzは必要)。消費電力はNV08C-RTKが300mW、S2525F8-BD-RTKが220mWなので、競合に比較して1/3以下。これは外付CPU追加しないでチップ内蔵CPUだけで処理しているのかもしれない。消費電力が小さいので、構造物の変位監視なんかには良さそうである。流行りのUAVのフライトコントローラ用にも。個人的には、GalileoとBeiDouに対応していないのはかなり不満なので、将来的にF/Wアップデートで対応して欲しい。(2/16追記)
-------------------------------------
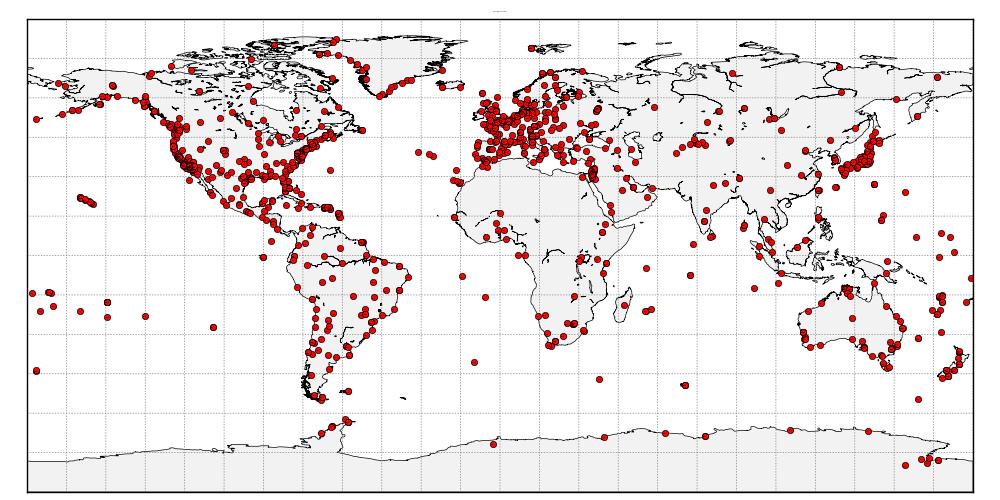
とりあえずITRF2014のGNSS基準局位置だけプロット。
...................................................................................................................................
ITRF2014が公開。6年ぶり。入力はIVS (1980.0-2015.0), ILRS (1983.0-2015.0), IGS (1994.0-2015.1), IDS (1993.0-2015.0)。新しい技術としては年周・半年周項推定と主要地震の余効変動 (PSD) モデル導入。細かくはAltamimiの発表参照。SINEXファイルはこちら。ITRF2008-2014変換パラメータはこちら。EOP入りのSINEXはサイズが10GBを超えて、ダウンロードに残り2日とか出るので諦めてキャンセル。PSDモデルはITRFのFTPサーバから本体とは別ファイルで落とせるが、係数はSINEXレコードAEXP_E, TEXP_E, ALOG_E, TLOG_E... 等で提供される。
補足: EOPを含まないITRF2014-IGS-TRF.SNX.gzだけ落としてみた。含まれるGNSS基準局数が1058。解凍後サイズは4GBを超えているが、ほとんどがSOLUTION/MATRIX_ESTIMATE L COVAブロックで、これを除くと1.7MB位。(2/15追記)
...................................................................................................................................
日経テクノロジー, すべての腕時計をGPS対応へ、ソニーが大きく前進、2016/02/08
消費電力が、GPSまたはGalileoで1.5mW、GPS+GLONASSで2.3mWとのこと。CXD5600が10mWだったので、これは凄い。一般的なボタン電池 (CR2032) の電力量を220mAh×3V=660mWhとして、連続稼働で18日間、1/20デューティで約1年。ロガー用途では1/30程度の間欠動作は問題ないので、実用的に充電なしで1年は動くGPSロガーが実現できそう。
補足: CXD5600の低消費電力技術はこの記事が詳しい。(2/14追記)
再補足: 現在、ロガー付きGPS腕時計で最も稼働時間が長いのはEpson MZ500B/Sの最大110時間 (平均1分/最大2分間隔) と思われる。ソニーの新しいチップ使うと大幅に時間のばせそうだな。(2/14追記)
-------------------------------------
日経テクノロジー, GPSの位置検出精度、IMUとの組合せで数cmに, 2016/02/13
論文は以下。CPS (common position shift) と呼ぶ手法でRTK-INS統合を行っている。CPSは "real-time sliding window Bayesian estimation approach to RTK GPS and inertial navigation" を高速に行う手順らしい。
Y.Chen et al., Computationally Efficient Carrier Integer Ambiguity Resolution in Multiepoch GPS/INS: A Common-Position-Shift Approach, IEEE Transaction on Control Systems Technology, 2015
-------------------------------------
メモ: 公式発表は見つけられなかったが、MSASの運用を担っていたMTSAT-1R (140E) は既に退役した様だ。TLEによる現在位置は178.4E、軌道傾斜角0.75度。気象ミッション (HRIT/LRIT配信) は昨年12/4に停止されている。受信機ではMSASの信号としてPRN129, 137の両者が受かっているが、航法データによる衛星位置を見ると両信号ともMTSAT-2 (145E) から放送されていると思われる。2020年頃よりQZSS GEO衛星からSBAS信号の配信が予定されているが、それまではMTSAT-2 1機でしのぐことになる。
...................................................................................................................................
S.Shaer, [IGSMAIL-7245] SVN49 reactivated, February 4, 2016
昨日から、G04という出自がよく分からない衛星が受かっていて何だろうと思っていたら、これだな。
-------------------------------------
ASCII.jp, ドローンをオープンソース化する「Dronecode」の今と未来, 2015/06/04
UAV関係のフォーラム読んでると"Pixhawk"というのが良く出てくるのだけど、これ何じゃいということで調べたら、3DR (3D Robotics) から出ているUAVのフライトコントローラらしい (CPUはCortex-M4)。この新バージョンPixhawk 2 (CPUはSnapdragon+Edison) 用のオープンソースUAVプラットフォームがDronecodeとのこと。その他、主なUAV関係のプラットフォームをリンクだけ。APM, PX4, MAVLink, UAVCAN, ROS。
補足: 分かりやすい概説。(19:09追記)
-------------------------------------
NASASpaceFlight.com, Soyuz 2-1B launches latest GLONASS-M spacecraft, February 6, 2016
2016/02/06 00:21 UTC, GLONASS-M衛星 (Kosmos 2514, GLONASS-M No.51), ロシア プレセツク宇宙基地より, Soyuz 2-1Bロケットで打ち上げ成功。GLONASS衛星としては2014/11/30 (GLONASS-K) 以来、GLONASS-M衛星としては2014/6/14打ち上げ以来。次の打ち上げは未定。
この記事によると今回の打ち上げはかなり紆余曲折があった様。
-------------------------------------
Tallysman GNSS, TW3970
まだDigi-Keyでは扱っていないけど、Tallysmanから3周波対応アンテナがでた様だ。データシート見ると仕様外だけどL6受かりそうな気が。TW3870の帯域広げただけっぽいので\3-4万位?。
-------------------------------------
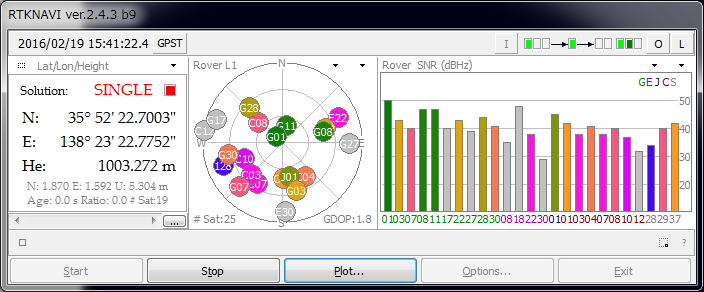
u-blox M8T F/W 3.01 × 2 + RTKLIB 2.4.3 b9 + GPS+QZS+GAL+BDS。とりあえずGalileoの動作も問題なさそう。Galileo衛星のうち信号が受かっているのはE11, E12, E14, E19, E20, E22, E24, E26, E30。予定軌道投入に失敗したE14とE5信号障害のE20は、信号は受かっているがエフェメリスは放送していない様。E18と昨年12/17に打ち上げられたE08, E09はまだ信号が受かっていない。(Galileo Constellation Info)
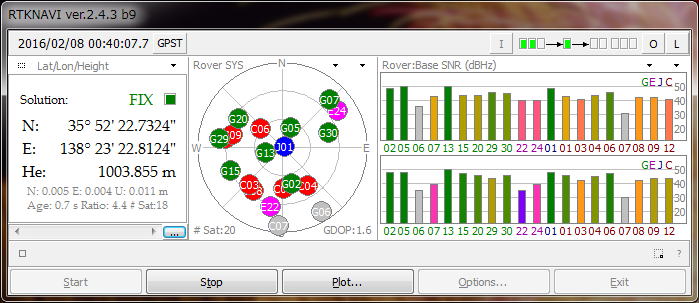
補足: E20から送られているI/NAVの中身をみてみると、ずっとtype=63 (dummy page) である。(16:54追記)
再補足: 2/9からE18の信号の受信も確認。エフェメリスは送信していない。(2/10追記)
...................................................................................................................................
drotek, L1 RTK GNSS
u-blox M8T+TW2410+Edison。"Web application to manage RTKLIB configuration and monitor status" が添付されている様。でも755.89ユーロ (税込) ということは約\10万でちょっと高すぎる様な気が。
補足: Full description見たら "Package includes: 2 x L1 RTK GNSS, 2 x TW2410 antenna" とあるので2式分の価格みたい。であればこれ位は妥当? オプションで5/8"スレッド付きのレドーム+ケース+バッテリがあれば使いやすそう。(2/7追記)
再補足: L1 RTK GNSSによるUAV自動着陸のYouTubeビデオ。Forum (フランス語) 読むと開発にはCNESとISAEも関係しているらしい。最近はRTKのUAV応用色んな所でやっている様で。(2/7追記)
再々補足: 紹介記事。(2/7追記)
-------------------------------------
ublox NEO-M8N F/W 3.01では、TRK-MEAS (0x0310) メッセージはSEC-0 (0x2700) メッセージとして暗号化されて出力されているらしい。ということでusm78-gis氏は解読したみたいだけど、公開するつもりはない様だ。
-------------------------------------
L6受ける場合、次にアンテナが問題になるが、過去書いたように広帯域のL1+L2アンテナでは仕様外でもL6帯域が受かるものが少なくない様だ。少なくともGPS-703-GGG, GPS-702-GG, GrAnt-G3TはLEX用に使えたと聞いている。もちろん若干ロスが増えるのでL6で実用になるかは評価が必要である。
-------------------------------------
L6のデータ復調について。LEXではロングコードによるパイロットCHがあったので、普通には (1) パイロットCH捕捉・追尾、(2) パイロットCH基準でデータCHシンボル切り出し、(3) シンボル単位でショートコード相関を取り位相検索。(4) コード位相から8ビットデータ復調、とすれば良かった。L6ではパイロットCHが無くなったので、代わりに (a) パターン固定のデータCHヘッダ部だけで信号捕捉・追尾、(b) L1かL5をパイロットCH代わりに利用、する必要がある。(a) では捕捉・追尾に全信号電力の (32+8)/2000=2% (-17dB) しか利用できないから、D1+D2両者を使い+3dBするとして実用的ではない。ということで多分 (b) しかないが、電離層と衛星・受信機/アンテナバイアスのケアが必要である。SDRによるLEXデータ復調は過去検討したが、ほぼそのまま使えそうである。L1アルマナックも復調して衛星切り替えする様にすれば1CHでも良いだろう。できればFFTの速そうなTegra X1使って実装してみたいのだけど。
-------------------------------------
マイナビニュース, 高密度化する都市において正確な測位情報を高速で実現する方法とは!? - 1秒測位を可能とする3Dカーナビ向け小型ソリューション, 2016/02/05
u-blox NEO-M8LによるADR (automotive dead
reckoning) の宣伝。本文からは「UBX-M8030」と「NEO-M8L」が別製品の様に読めるけど、NEO-M8LにはUBX-M8030-KA-DRが内蔵されているはず。あと「3D加速度計とジャイロスコープを内蔵した」とあるけど、これらはモジュールには含まれていないはず。まあ翻訳が混乱しているだけとは思う。
補足: NEO-M8Lのカタログ読むと"on-board 3D acceleometer, 3D-gyroscope sensors, and speed-pulse input (harware or message-bus" とあるので加速度計とジャイロは内蔵しているらしい。(17:09追記)
-------------------------------------
公開されたIS-QZSS センチメータ級測位補強編ドラフトを少し読む。
(1) D1, D2共に拡散符号は10230 chip (2.5575Mcps,
4ms) のKasami系列。D1とD2はチップ単位の時分割多重。データ変調は8bit/symbolのCSKでビットレート2000
bps。1メッセージ/秒で、構成はヘッダ (49)
+ データ (1695) + RS (256) の2000 bits。ヘッダは、プリアンブル
(32) + PRN (8) + MT ID (8) + アラートフラグ
(1)。MT IDは、ベンダID (3) + 管制局識別 (2)
+ リザーブ (2) + サブフレームID (1)。サブフレームIDは1でCLASサブフレーム先頭を表す。以上はLEXデータチャネル仕様とほぼ同じだがMT
ID内容は変更されている。
(2) CLASメッセージは5メッセージ/サブフレーム、6サブフレーム/フレームなので、30メッセージ
(秒)/フレーム。
(3) 各メッセージデータ部には、RTCM 3.2 SSR互換の「Compact
SSR」のサブタイプ (ST) メッセージが格納される。STは1〜10。なお、RTCM
MTはProprietaryメッセージを表す4073であり「Compact
SSR」正式規格化後には変更される可能性がある。
(4) 衛星マスク (ST1) には、補強対象衛星と対象信号が最大15機分格納される。サポートされる衛星系はGPS,
GLONASS, Galileo, BeiDou, QZSS, SBAS。
(5) 軌道補正 (長期補正) (ST2) はSSR軌道補正に似ているが位置補正項のみで速度補正項はない。IODEはGalileo以外は8bit、Galileoは10bit。
(6) クロック補正 (高速補正) (ST3) はSSRクロック補正に似ているが軌道と同様にC0項のみ。
(7) コードバイアス, 位相バイアス, 衛星バイアス
(ST4,5,6) は衛星マスクで指定された衛星と信号の順番で格納される。衛星バイアスは1メッセージ中にコードと位相バイアスの両者が格納される。
(8) URA (ST7) は衛星毎で6bit。
(9) STEC補正 (ST8) は衛星毎のスラント電離層遅延を緯度経度に対して多項式展開した係数。
(10) グリッド補正 (ST9) はグリッド毎の対流圏鉛直補正
(静水+水蒸気), グリッド-衛星毎のスラント電離層遅延。電離層遅延は
絶対値か(9)の相対値かを範囲IDで切り替える。
(11) 送信スケジュールはST1,2,6,7は30秒毎、ST3,8,9は5秒毎。ただしこれは1例でありユーザは特定パターンを想定してはいけない。
ちょっと気になった点としては、BeiDou/SBASのIODEの取り扱いと衛星姿勢モデル。BeiDou/SBASは当面補強対象外だし、エリア狭いので姿勢モデル規定しなくてもちゃんとアンビギュイティ解けるということなのかもしれない。ただ「位相バイアス」の定義があいまいだし、これによるユーザアルゴリズムも規定されていないので、ちゃんとアンビギュイティ解くのは大変かも。可能ならユーザアルゴリズムのリファレンス実装コードを公開してくれないかなあ。まあ、そこまでやったら色々なビジネスモデルが成り立たないかもしれないけど。
ということで、SDRでL6 CLASメッセージを受信して、VRSのRTCMメッセージを出力する受信機を (研究として) そのうち開発するかもしれない。(誰かが、製品として\10万以下で発売してくれるならそれでもよい)
-------------------------------------
NASASpaceFlight.com, Atlas V opens 2016 campaign with successful GPS IIF-12 launch, February 4, 2016
2016/02/04 13:38 UTC, GPS Block IIF-12衛星, 米国 ケープカナベラル空軍基地よりAtlas Vロケットで打ち上げ成功。Block IIF衛星としては最後の衛星となる。衛星番号はSVN70/PRN04。次の打上は最初のBlock IIIA衛星となるが、時期は未定で少なくとも来年5月以降とのこと。
補足: 各報道ではPRN04となっているがNANU (2016011) ではPRN番号は32とされている。今回の打ち上げに先だち、1/25に現役最後のBlock IIA衛星SVN23 (PRN32) がdecommissionされた。これで運用中の全ての衛星がBlock IIR世代以降となった。(9:55追記)
...................................................................................................................................
EMLID Community Forum, Good end results and comparison
Reachの性能評価レポート。Leica GPS1200の結果と比較している。ただしアンテナはTW2410に置き換えている。
-------------------------------------
高須, RTKLIBの紹介, トラ技2月号オフ会, 2016年2月1日
先日のトラ技オフ会の資料をアップ。
-------------------------------------
QSS, [お知らせ] PS-QZSS及びIS-QZSS説明会 (センチメータ級測位補強サービス編), 2016年2月4日
PS-QZSS及びIS-QZSSの「センチメータ級測位補強サービス編」ドラフトが公開された。2/12には説明会も開催される。なおQZSS 2号機以降のL6信号は、1号機のLEX信号に比較して、データチャネルが2ch化される。センチメータ級測位補強サービス (CLAS) はこのうちD1チャネル (L6D) を使って提供される。D2チャネル (L6E) はセンチメータ級技術実証用とされるが、詳細はまだ規定されていない。2ch化に伴いロングコードによるパイロット信号が削除されたこと、信号レベルが1.12dB低くなることから、受信機のデータ復調条件が悪くなることから実用的に使えるかは確認が必要だろう。CLASに関しては、データ形式やユーザアルゴリズムが公開されたこと、データのスクランブル等は施されずサービス自体は誰でも無償で利用可能なこと、から、安価なL6対応受信機が現れれば、地上のネットワークRTKサービスに代わって普及が進む可能性もある。ただし利用可能なエリアは当面日本域に限定される。
補足: 三菱 藤田氏によるCLASの解説論文。(23:57追記)
-------------------------------------
NASASpaceFlight.com, Long March 3C launches Beidou-21 satellite, February 1, 2016
2016/02/01 07:29 UTC, BeiDou M3-S衛星, 中国 Xichang宇宙センタからLong March 3Cロケットで打ち上げ成功。BeiDou 衛星として21機目、phase III衛星としては5機目。軌道はMEO。今年中にあと1機の打上が予定されている。
この記事によると、中国は2018年までにあと18機 (!) のBeiDou衛星を打ち上げる予定。5機の新世代衛星は"testing inter-satellite crosslinks and a new navigatio-signaling system that will set the framework and technical standards for global coverage" とのこと。
...................................................................................................................................
| Home | by T.Takasu |