{kind=link}
|
擔婰丒旛峫榐 |
2005 |
2006 |
2007 |
2008 |
2009 |
2010 |
2011 |
2012 |
2013 |
2014 |
2015 |
2016 | 2017/ 1 2
3
4
5
6
7
8
9
10
11
12 |
2018 Search |
| November | December 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
January | Home |
...................................................................................................................................
崱擭傕廔傢傝側偺偱丄椺擭捠傝崱擭偺應埵塹惎偺懪偪忋偘傑偲傔丅8夞12婡 (偆偪幐攕1婡)丅
| Date/Time (UTC) | Satellite | Orbit | Launcher | Launch Site | Notes |
| 2017/05/17 11:54 | SES-15 (WAAS) | GEO | Soyuz ST-A | Kourou, French Guiana | 丂 |
| 2017/06/01 00:17 | QZS-2 | IGSO | H-IIA | Tanegashima, Japan | J02丂 |
| 2017/08/19 05:29 | QZS-3 | GEO | H-IIA | Tanegashima, Japan | J07 |
| 2017/08/30 13:30 | IRNSS-1H | IGSO | PSLV | Satish Dhawan SC, India | Failed |
| 2017/09/22 00:02 | GLONASS-M (No.52S) | MEO | Soyuz 2-1B | Plesetsk, Russia | R14丂 |
| 2017/10/09 22:01 | QZS-4 | IGEO | H-IIA | Tanegashima, Japan | J03 |
| 2017/11/05 11:45 | BeiDou-3M1, 3M2 | MEO | Long March 3B | Xichang, China | 丂 |
| 2017/12/12 18:36 | Galileo FOC-15, 16, 17, 18 | MEO | Ariane 5 ES | Kourou, French Guiana | E21,25,27,31 |
嶲峫: 2010擭 (13婡)丄2011擭 (14婡)丄2012擭 (12婡)丄2013擭 (3婡)丄2014擭 (13婡)丄2015擭 (15婡)丄2016擭 (16婡)丅
棃擭偺梊掕偼丄BeiDou-3M x 2 (1寧)丄BeiDou-3G (1Q)丄IRNSS-1I (1Q)丄GLONASS-K1(1Q)丄GLONASS-K2 (慜敿)丄GLONASS-K1 (2Q)丄Galileo FOC x 4 (7寧)丄GLONASS-K1 (3Q), GLONASS-K1 (4Q)丄GLONASS-K2 (4Q)丄GLONASS-M x 2 (11寧)丄GPS-III (?)丄BeiDou-2G (?)丄BeiDou-2I (?)丄BeiDou-3M x 7 (?)丅懪忋梊掕偼SpaceFlightNow偲NASA SpaceFlight.com Forum偐傜廍偭偰偄傞丅
屄恖揑偵偼丄崱擭偼戝夁側偔惷偐偵夁偓偨丅梊掕捠傝丄QZSS偑3婡柍帠忋偑偭偰丄挿偄娫婃挘偭偰偄傞娭學幰偺搘椡偑曬傢傟偰丄杮摉偵椙偐偭偨丅棃擭弔偵偼丄QZSS傕僒乕價僗僀儞偲側傝恀壙偑栤傢傟傞偙偲偵側傞丅傑偩怓乆偲偁傞偐傕偟傟側偄偗偳丄奆偑岾偣偵側傝傑偡傛偆偵丅
-------------------------------------
CQ僄儗僋僩儘僯僋僗丒僙儈僫, 幚廗丒僺僞儕1cm ! 怴GPS RTK僗僞乕僩傾僢僾乽僩儔儞僕僗僞媄弍乿 2018擭1寧崋摿廤楢摦婇夋 - RTK偵傛傞僙儞僠儊乕僞媺埵抲寁應媄弍偺婎慴偲墳梡, 2018擭2寧14擔
2/14偺RTK僙儈僫偱偡偑丄婛偵枮惾偵側偭偰偟傑偭偨傛偆偱偡丅婓朷幰偑懡偗傟偽丄捛壛偱幚巤偡傞偐傕偟傟傑偣傫丅偛婓朷幰偼CQ弌斉偵偍栤偄崌傢偣偔偩偝偄丅
...................................................................................................................................
QZSS奣嫷: 2017/12/27 17:30 UTC崰丄QZS-3 (PRN199) L1C/A傾儔乕僩OFF丅僒乕價僗掆巭婜娫偼丄NAQU偱帠慜捠抦偝傟偨寁夋偵斾妑偟偰戝暆偵抁偄38帪娫敿偱偁偭偨丅
...................................................................................................................................
QZSS奣嫷: 2017/12/26 02:00 UTC崰丄QZS-3 (PRN199)
L1C/A 傾儔乕僩ON丅NAQU2017135偵傛傞偲丄12/30 01:59 UTC傑偱僒乕價僗掆巭丅FORECAST
OUTAGE側偺偱丄惷巭塹惎偺婳摴曐帩塣梡偺偨傔偱偼側偄偐偲悇應偝傟傞偑丄塣梡帋尡僒乕價僗奐巒屻1廡娫偱娵4擔娫傕僒乕價僗傪掆傔傞偲偄偆偺偼挿偡偓傞婥偑偡傞偺偱丄側傫傜偐偺忈奞敪惗偺壜擻惈傕偁傞丅側偍丄QZS-3 L6D (PRN199) 偼傾儔乕僩OFF偺傑傑丄僒乕價僗偼宲懕偝傟偰偄傞丅
...................................................................................................................................
BeiDou Navigation Satellite System Signal In Space Interface Control Document, Open Service Signals B1C and B2a (Test Version), August, 2017
BeiDou OS B1C/B2a SIS-ICD (test version) 偺塸岅斉丅
...................................................................................................................................
DroneDJ, New DJI Phantom 4 RTK model spotted, Decmber 20, 2017
DJI P4 RTK丅偨偩偟惓幃敪昞偱偼側偄丅奜晅偱偼丄僇儊儔僔儍僢僞僀儀儞僩庢傞偺偑戝曄側偺偲丄撪憼GPS偵姳徛偟側偄條偵傾儞僥僫庢傝晅偗偵嬯楯偡傞偺偩偗偳丄弮惓側傜栤戣側偄丅拞恎偑M8T側傜 Pro + \5枩偔傜偄偱弌偣傞偺偱偼梊憐丅偦偆偡傞偲廬棃昳偵斾妑偟1寘偼埨偄丅幚偼RTKLIB巊偭偰偄傞偐傕丄偲柌憐丅偙傟偲堦弿偵丄Pix4D攦偆偐丄DroneDeply偺夝愅巊偊偽丄GCP側偟偱丄旘偽偡偩偗偱偡偖惛枾抧恾嶌傟傞偺偱丄傑偡傑偡DJI巊偆恖偑憹偊偦偆丅
曗懌: 懕曬丅"... it is still a prototype and we do not yet have a timetable for when it will be available for purchase." 偲偺偙偲丅(12/23捛婰)
嵞曗懌: RTK丄偲偄偆偐PPK偩偲丄旘偽偡慜偵堦乆婎弨揰傪愝抲偟側偗傟偽偄偗側偄偺偑柺搢丄婎弨揰埵抲寛傔傞昁梫傕偁傞偟丅偳偆偣僋儔僂僪偱夝愅偡傞側傜丄摨帪偵屻張棟VRS偱GNSS僨乕僞偺夝愅偱偒傞條偵偡傟偽丄儂儞僩偵丄偳偙偱傕峴偭偰旘偽偟偰僨乕僞傪僋儔僂僪偵傾僢僾儘乕僪偡傞偩偗偱丄惛枾抧恾偑弌棃忋偑傞條偵偱偒傞丅偙偺僒乕價僗偼帠嬈偲偟偰廫暘惉棫偡傞偼偢丅僕僃僲僶偝傫偁偨傝丄偄偐偑丅
-------------------------------------
擔宱ITPro, 擔杮斉GPS偼擾嬈傪曄偊傞丄僩儔僋僞乕偺帺摦塣揮傒偪傃偔, 2017/12/19
> 應埵偺惛搙偵娭偟偰偼乽RTK偼堦斒揑偵岆嵎2乣3cm偲尵傢傟傞丅傒偪傃偒偼壗搙傕幚尡偟偨寢壥丄RTK傛傝偼偪傚偭偲埆偄偑
> 岆嵎4cm偩偲尵偊傞丅偙偺惛搙偱偁傟偽擾嬈偺尰応側傜慡偔栤戣側偄乿乮栰岥嫵庼乯偲偄偆丅
> ...
> 2017擭10寧丄弨揤捀塹惎僔僗僥儉僒乕價僗偑杒奀摴忋晉椙栰挰偱丄杒奀摴戝妛丄僋儃僞丄儎儞儅乕丄堜娭擾婡嶲壛偺傕偲丄傒偪
> 傃偒傪妶梡偟偨儘儃僢僩僩儔僋僞乕帺摦憱峴偺幚徹幚尡傪峴偭偨丅栰岥嫵庼偵傛傞偲丄MADOCA-PPP乮杒戝乯傑偨偼CLAS乮擾婡
> 儊乕僇乕3幮乯偵傛傞cm媺偺應埵傪梡偄偰帺摦憱峴傪帋偟丄RTK-GNSS偲斾傋懟怓側偄偐側偳偺僨乕僞傪庢偭偨偲偙傠丄栤戣偼
> 側偐偭偨偲偄偆丅
偲偺偙偲丅
曗懌: 栰岥愭惗偺尵偆乽傒偪傃偒乿乽岆嵎4cm乿偑丄CLAS傪巜偟偰偄傞偺偐丄MADOCA傪巜偟偰偄傞偺偐偼晄柧丅彮側偔偲傕10寧偺幚徹幚尡偱偼丄杒戝偼MADOCA巊偭偨傒偨偄偩偗偳丅(12/23捛婰)
...................................................................................................................................
businessnetwork.jp, 僙儞僠儊乕僞乕媺應埵偑IoT傪曄偊傞, 2017.12.21
> 側偍丄傒偪傃偒偺僙儞僠儊乕僞乕媺應埵曗嫮僒乕價僗偵傛傞崅惛搙應埵偼丄擔杮崙撪偟偐懳墳偟偰偄側偄丅傕偟丄奀奜
> 偱傕僙儞僠儊乕僞乕媺應埵傪幚尰偟偨偄応崌偼JAXA偑奐敪拞偺崅惛搙婳摴帪崗悇掕僣乕儖乽Multi-GNSS
Advanced
> Demonstration tool for Orbit and Clock
Analysis乮MADOCA乯乿偵傛傞曗嫮怣崋傪巊偊偽丄傒偪傃偒偺僙儞僠儊乕
> 僞乕媺應埵曗嫮僒乕價僗偲摨摍偺應埵惛搙偑壜擻偵側傞丅MADOCA偺曗嫮怣崋偼丄僀儞僞乕僱僢僩宱桼偱庴怣偱偒傞丅
撉傓恖傪崿棎偝偣傞婰帠丅偁偲乽摨摍偺應埵惛搙乿偭偰偺偼丄扤偑尵偭偰偄傞偺偩傠偆偐丅
...................................................................................................................................
偩偐傜丄QZS-3 (PRN199) 偑僗儅儂偱庴偐傜側偄偺偼QZSS懁偺栤戣偱偼側偔偰丄僗儅儂庴怣婡偺栤戣丅幚嵺偵IS-QZSS-001偵婎偯偄偰偪傖傫偲嶌傜傟偨庴怣婡偱偼丄偢偭偲慜偐傜怣崋偑庴偐偭偰偄傞 (嶲徠)丅偲偄偆偙偲偱丄暥嬪傪尵偆側傜丄Broadcom偐Qualcomm傊偳偆偧丅
...................................................................................................................................
QZSS, CLAS僥僗僩儔僀僽儔儕, 2017擭12寧19擔
9/28偵岞奐偝傟偨偑乽僾儘僌儔儉僐乕僪偺栤戣乿偺偨傔丄偡偖偵岞奐掆巭偲側偭偰偄偨丄CLAS僥僗僩儔僀僽儔儕偑峏怴偝傟偰岞奐嵞奐丅L6庴怣婡傪帩偭偰偄側偔偰傕丄擖椡僨乕僞偲偟偰丄婛偵採嫙奐巒偝傟偰偄傞僙儞僠儊乕僞媺應埵曗嫮僒乕價僗偺岞奐傾乕僇僀僽
(嶲徠) 傪棙梡偡傞偙偲偑偱偒傞丅摦嶌妋擣偟偰偄側偄偑丄CSSR2OSR偺弌椡僼僅乕儅僢僩偲偟偰RTCM
MSM傪巜掕偱偒傞條偵側偭偨偺偱丄揔摉側壖憐婎弨揰僨乕僞傪RTCM
MSM偱弌椡偟丄RTKLIB偺RTKCONV偱RINEX偵曄姺偟丄RTKPOST偱儐乕僓庴怣婡偲偺娫偱婎慄夝愅傪峴偆偙偲偑偱偒傞偼偢偱偁傞丅
曗懌: 嶰旽偺曽偐傜偛楢棈傪捀偒丄CSSR2OSR偺RTCM MSM弌椡婡擻偼摦嶌枹妋擣偱僒億乕僩奜偲偺偙偲丅(12/20捛婰)
-------------------------------------
QZSS, 傒偪傃偒3崋婡偵傛傞乽帋尡僒乕價僗乿偺奐巒偵偮偄偰, 2017擭12寧19擔
岞幃儕儕乕僗丅儕儕乕僗偵偼側偄偑丄摨帪偵QZS-3 L6E (PRN209) 偱MADOCA-PPP偺攝怣偑奐巒偝傟丄偙傟偱丄1擔24帪娫 壗帪偱傕MADOCA-PPP偑棙梡偱偒傞條偵側偭偨丅偲偰傕婐偟偄丅偨偩丄慜偐傜彂偄偰偄傞條偵丄QZS-3 偺怣崋 (PRN199) 傪庴怣偱偒傞巗斕庴怣婡偼丄尰嵼傎偲傫偳懚嵼偟側偄丅奺庴怣婡偺崱屻偺F/W峏怴傪懸偮昁梫偑偁傞丅
曗懌: IGS MGEX偺QZSS偺暸 (嶲徠) 偱偼丄9/10偵CONGO/MGEX monitoring偱QZS-3 (J07) 偺怣崋憲怣奐巒傪妋擣偟偨丄偲偝傟偰偄傞偑丄巊傢傟偨庴怣婡偼晄柧丅MGEX偺傾乕僇僀僽傪偄偔偮偐偁偨偭偰傒偨斖埻偱偼丄QZS-3 (J07) 傪娷傫偩RINEX傪敪尒偡傞偙偲偼偱偒側偐偭偨丅傑偨丄QZSS嵟廔楋偺SINEX僼傽僀儖偵傛傞偲丄QZSS MS (娔帇嬊) 偱偼JAVAD TRE-3 DELTA庴怣婡偲F/W "3.7.0-J2-C" 偑巊傢傟偰偄傞偑丄偙偺F/W偼MS梡偺摿暿巇條偱丄巗斕庴怣婡偵偼採嫙偝傟偰偄側偄偲巚傢傟傞丅(22:53捛婰)
-------------------------------------
偙傟傕丄朸僽儘僌偺婰帠傪堷梡丅
> RTKLIB亄M8P偺慻崌偣偼丆M8P撪憼應埵寁嶼僄儞僕儞傛傝惈擻偼傗偼傝忋丏掕婜揑偵帋偟偰偄傑偡偑丆
> 偆乕傫傗偼傝Fix偑抶偄偱偡丏
偭偰杮摉偐側偁丅u-blox偺M8P敪昞夛偱偼丄M8P偼RTKLIB偲斾妑偟偰傕偙傟偩偗惈擻偑偄偄傫偱偡丄偭偰摼堄偘偵愢柧偟偰偨偗偳丅RTKLIB偺愝寁丄傕偼傗屆偄偟丄偦傕偦傕丄庴怣婡撪憼RTK僄儞僕儞偱偼丄奜晹弌椡偝傟側偄怓乆側僀儞僒僀僟乕忣曬傪巊偊傞偺偱丄側偐側偐奜晹RTK僄儞僕儞偑彑偮偺偼擄偟偄偺偱偁傞丅
...................................................................................................................................
QZSS奣嫷: 2017/12/18 09:30 UTC崰 QZS-3 L1C/A (PRN 199) 傾儔乕僩OFF丄L6D (PRN 199) 傾儔乕僩OFF丄L6E (PRN 209) MADOCA-PPP攝怣奐巒 (傾儔乕僩ON)丅
曗懌: NAQU 2017132丅QZS-3 帋尡僒乕價僗奐巒丅(23:00捛婰)
-------------------------------------
擔宱ITPro, 働僞堘偄偺惛搙丄擔杮斉GPS乽傒偪傃偒乿偺幚椡, 2017/12/18
偍偍丄MSJ庴怣婡偵傛傞MADOCA-PPP偺應埵寢壥偑丅QZSS偺MADOCA-PPP傪偪傖傫偲埖偭偰偄傞婰帠偭偰丄弶傔偰偱偼側偄偐丅
...................................................................................................................................
乽RTK僗僞乕僞僉僢僩乿晅懏偺傾儞僥僫偵偮偄偰偼僒億乕僩暸偵拲堄偑偁傝傑偡偑丄惈擻偼偁傑傝婜懸偟側偄曽偑丅棃擭2寧偺僙儈僫乕傑偱偵偼丄M8P偲慻傒崌傢偣偨応崌偺丄晅懏傾儞僥僫丄掕斣Tallysman TW2710丄Harxon HX-CSX601A偺RTK惈擻偺嵎偼昡壙偡傞梊掕丅偮偄偱偵M8T偲RTKLIB偺慻崌偣偲偺斾妑傕偡傞偐傕丅(尰嵼丄M8T側傜丄戝懱丄Galileo 5塹惎丄QZSS 2塹惎偼捛壛偱庴怣偱偒傞偺偱丄偙偺嵎偑偳傟偔傜偄岠偔偐)
-------------------------------------
嵍偑僩儔媄乽RTK僗僞乕僞僉僢僩乿偺M8P儃乕僪丄塃偑僒儅乕僗僋乕儖梡偺M8P儈僯EVK儃乕僪 (偺梋傝)丄偳偪傜傕M8P-2斉偱丄擬廂弅僠儏乕僽偱愨墢曐岇丅僉僢僩偺曽偼摦偄偰偄傞偐偡偖偵偼暘偐傜側偄偺偱LED梸偟偐偭偨偱偡偹丅
-------------------------------------
乽RTK僗僞乕僞僉僢僩乿偺巊偄偙側偟偵偮偄偰偼丄僩儔媄僒億乕僩暸偵傕壀杮愭惗偵傛傞徻偟偄夝愢偑捛壛偝傟傑偟偨丅偟偐偟丄庤弴偑暋嶨偡偓傞偩傠丄偲偄偆姶偠偱丄慡偔乽僗僞乕僞乿岦偗偱側偄偱偡偹丅巹偼丄u-blox偲偼4悽戙慜偺LEA-4T偐傜偺晅偒崌偄側偺偱丄僩儔傇偭偨応崌偰傕丄姩偲宱尡偱側傫偲偐偱偒傑偡偑丄RTCM ? NTRIP ? 偲偄偆RTK弶怱幰偑丄帺暘偩偗偱夝寛偡傞偺偼晘嫃偑崅偡偓傞條側丅偁偲丄M8P傑偩彮偟晄埨掕側偲偙傠偑偁傝丄椺偊偽丄偨傑偵RTCM3 偺弌椡愝掕偑偱偒側偔側偭偨傝偡傞傫偩偗偳丄偙傟偼F/W偺僶僌 ? 偄偢傟偵偟偰傕丄巇帠偱RTK巊偆側傜\100枩僆乕僶乕偱傕僒億乕僩晅偄偨儊乕僇惢應検梡庴怣婡傪偍姪傔偟偰偍偒傑偡丅
曗懌: M8P F/W 3.01 HPG 1.40偼丄F/W 3.01 HPG 1.30偵斾妑偟偰晄埨掕偩偲偺忣曬傪栣偄傑偟偨丅傕偟F/W峏怴傪峫偊傜傟偰偄傞曽偼丄師偺F/W 儕儕乕僗傑偱丄懸偭偨曽偑傛偄偐傕偟傟傑偣傫丅(12/18捛婰)
-------------------------------------
僩儔媄乽RTK僗僞乕僞僉僢僩乿偺庢傝埖偄妎彂傪寭偹偰丄M8P偺愝掕庤弴摍丅挿偔側偭偨偺偱屻偐傜丄僗僋儕乕儞僔儑僢僩傪捛壛偟偰傑偲傔捈偟丄僩儔媄偺僒億乕僩暸偵堏摦偡傞偐傕丅
(1) M8P嵟怴F/W傊偺峏怴
(a) 乽RTK僗僞乕僞僉僢僩乿M8P偺F/W僶乕僕儑儞偑堦悽戙慜偺F/W 3.01 HPG1.30偩偭偨偺偱丄嵟怴斉F/W傪僟僂儞儘乕僪丅僟僂儞儘乕僪愭:
F/W 3.01 HPG1.40丅
(b) 忋婰傪夝搥偡傞偲僨傿儗僋僩儕NEO-M8P-FW301-HPG140_RNwithFW壓偵埲壓偺僼傽僀儖偑摼傜傟傞丅
NEO-M8P-FW301-HPG140_RN_(UBX-17021504).pdf
DO_EXT_301_HPG_140_REFERENCE.ab799cc302b64f28ba73b55dfa945a04.bin
DO_EXT_301_HPG_140_ROVER.91bbd17d889e0fe40c2d823991595224.bin
(c) 嵟怴u-center Windows傪僟僂儞儘乕僪丅僟僂儞儘乕僪愭:
u-cener Windows丅嵟怴斉偼v8.27丅
(d) M8P偺USB億乕僩偵PC傪愙懕丅u-center傪PC偵僀儞僗僩乕儖偟偰婲摦丅晛捠偼M8P愙懕偺僔儕傾儖億乕僩傪専嶕偟偰帺摦愙懕偡傞偼偢丅帺摦愙懕偝傟側偄応崌偼丄儊僯儏乕
Receiver - Port - COM x 傪幚峴偟偰庤摦偱愙懕丅
(e) u-center 儊僯儏乕 Tools - Legacy Firmware
Update 傪幚峴丅Firmware image 偲偟偰 (b)
偺 ...REFERENCE....bin (M8P-2偺応崌)丄...ROVER....bin
(M8P-0偺応崌) 傪巜掕丅Flash Information Structure
[FIS] file 偲偟偰u-center僀儞僗僩乕儖僨傿儗僋僩儕壓偺flash.xml傪巜掕丅Use
this Baudrate for update傪僠僃僢僋偟115200傪慖戰丅OK傪墴壓丅僂僀儞僪僂偵彂偒姺偊恑峴拞偺儊僢僙乕僕偑弌偰丄偟偽傜偔偟偰僂僀儞僪僂偑椢偵曄傢傟偽姰椆丅
(2) M8P偺婎杮愝掕
(a) M8P偵傾儞僥僫傪愙懕丅傾儞僥僫偼偱偒傟偽壆奜偵弌偟偨曽偑傛偄偑丄幒撪偱傕憢嵺側傜壗塹惎偐怣崋偼廍偊傞偐傕丅u-center偺儊僯儏乕View
- Message View偲View - Configuration View傪幚峴偟偰丄椉僂僀儞僪僂傪暲傋偰昞帵偡傞偲丄摦嶌傪妋擣偟傗偡偄丅偁偲丄儊僯儏乕
View - Docking Windows 偱丄Satellite Level,
Data, Satellite Position傪昞帵偝偣偰丅
(c) 嵟弶偵M8P偺F/W僶乕僕儑儞傪妋擣丅u-center
Message View偺UBX - MON - VER傪慖戰丅埲壓偱偁傟偽惓忢偵F/W峏怴偝傟偰偄傞丅
ROM BASE 2.01 [75331], FWVER=HPG 1.40REF,
PROTVER=20.30, FIS=0xEF4015 [2000737], GPS,
GLO, BDS, QZSS丅
弶婜F/W偱偼丄QZSS偼枹僒億乕僩偩偭偨偑丄嵟怴斉偱偼僒億乕僩偝傟偰偄傞條偩丅Galileo偼枹丅
(d) 師偵愝掕傪僨僼僅儖僩偵儕僙僢僩丅Configuration
View偺CFG - Revert to default configuration
傪慖傫偱丄Send傪墴壓丅僨僼僅儖僩偱偼NMEA
GNGGA, GNGLL, GNGSA, GNGSV, GNRMC, GNVTG偺弌椡偑桳岠偵偝傟偰偄傞丅NMEA偺弌椡偼怓乆晄搒崌側偺偱丄偲傝偁偊偢慡晹OFF偵偡傞丅慡晹OFF偵偡傞偨傔偵偼Messaage
View偺NMEA傪塃僋儕僢僋偟偰丄儊僯儏乕Dissable
Child Messages傪慖戰丅
(e) 戙傢傝偵埲壓偺儊僢僙乕僕傪桳岠偵偡傞丅UBX
- NAV - PVT, UBX - NAV - SVINFO丅偙傟傕Message
View偱埲忋偺儊僢僙乕僕傪塃僋儕僢僋偟丄儊僯儏乕Enable
Message傪慖戰偡傞丅UBX - NAV - PVT偱RTK偺僗僥乕僞僗傪丄UBX
- NAV - SVINFO 偱婎弨揰僨乕僞偺擖椡忬懺傪妋擣偱偒傞丅
(f) 擖弌椡億乕僩偺僼僅乕儅僢僩愝掕傪峴偆丅Configuration
View - PRT (Ports) 偱Target偲偟偰3 - USB傪慖戰丄Protocol
In丄Protocol Out嫟偵 0+1+5 UBX+NMEA+RTCM3傪慖戰丄Send丅僨僼僅儖僩偱偼偙偺儌乕僪偵愝掕偝傟偰偄傞偼偢丅側偍丄M8T偺屆偄F/W偱偼丄UART偑枹巊梡偱傕Baurate偑僨僼僅儖僩偺9600偵側偭偰偄傞偲丄惗僨乕僞儊僢僙乕僕偑寚棊偡傞栤戣偑敪惗偟偰偄偨偺偱丄擮偺偨傔丄1
- UART 偺Baurate傪嵟戝偺921600偵愝掕偟偰偍偔偙偲傪悇彠丅
(3) 婎弨嬊偲偟偰偺愝掕 (M8P-2偺傒)
(a) u-center Configuration View 偺MSG (Message)
偱F5-05 RTCM3.2 1005 - USB On偵僠僃僢僋丄Send丅摨條偵F5-4D
RTCM3.2 1077, F5-57 RTCM3.2 1087, F5-7F RTCM3.2
1127 偺USB弌椡傪On偵愝掕丅Message View偺RTCM3
1077, 1087偑崟偔側偭偰偄傞偙偲偱弌椡傪妋擣丅偙偺忬懺偱偼RTCM3
1005 (Stationary RTK referecence station
ARP), 1127 (BeiDou MSM7) 偼弌椡偝傟側偄丅儊僢僙乕僕弌椡妋擣偼儊僯儏乕
View Packet Console偱Packet Console傪昞帵偟偰傕椙偄丅
(b) Configuration View 偺TMODE3 (Time Mode
3) 偺Mode傪2 - Fixed Mode偵愝掕丄Use Lat/Lon/Alt
Position偵傾儞僥僫埵抲偺堒搙丄宱搙丄崅搙傪愝掕丄Send丅偙偺埵抲偑戝偒偔偢傟偰偄傞偲丄RTCM3
1005偑弌椡偝傟側偄傛偆偩丅惓忢偵愝掕偝傟傞偲丄RTCM3
1005偑弌椡偝傟丄Message View偺UBX - NAV -
PVT 偺Position Fix Type 偑 TIME偵丄傑偨Position
Latitude, Longitude, Height, MSL偑愝掕偟偨堒搙,
宱搙, 崅搙偵曄傢傞丅
(c) 儊僯儏乕 Receiver - NTRIP Server/Caster...
傪幚峴丅NTRIP server/caster settings 偱婎弨嬊僨乕僞偺憲怣曽朄傪愝掕丅NTRIP
caster settings - Port 偵NTRIP僉儍僗僞億乕僩斣崋昗弨揑偵偼NTRIP偺2101傪丄Mount
point settings偺Name, Identifier, Country偵揔摉側柤慜傪丄Get
configuration automatically偵僠僃僢僋傪擖傟偰OK丅偙傟偱u-center偑NTRIP
caster偲偟偰棫偪忋偑傝丄奜晹偐傜傾僋僙僗偱偒傞條偵側傞丅妋擣偺偨傔丄RTKLIB偺NTRIP
Browser偺傾僪儗僗偲偟偰localhost:2101偲擖傟偰儕僞乕儞丅Mountpoint,
ID, Country偵愝掕偟偨抣偑丄Format偵RTCM 3.2,
Format-Details偵1005(1), 1077(1), 1087(1),
Generator偵U_BLOX偑弌傟偽OK丅
(d) 僨僼僅儖僩愝掕偱偼GPS偲GLONASS偑桳岠偵側傞偑丄GLONASS偺戙傢傝偵BeiDou傪巊梡偟偨偄応崌丄Configuration
View偺GNSS丄UBX - CFG (Config) - GNSS (GNSS
Config) 偱丄GLONASS偺Enable僠僃僢僋傪偼偢偟丄BeiDou偺Enable傪僠僃僢僋偟丄Send丅偨偩偟丄尰峴F/W偱偼丄GNSS傪愗傝懼偊偨応崌丄惓忢偵婎弨嬊儌乕僪偑堐帩偝傟側偄栤戣偑偁傞條偱丄Configuration
View - TMODE3偱Mode傪偄偭偨傫0 - Disabled偵愝掕屻丄嵞搙2
- Fixed Mode偵愝掕偟側偍偡昁梫偑偁傞丅偙傟偱RTCM3
1005, 1077, 1127 (BeiDou MSM7) 偑弌椡偝傟傞傛偆偵側傞丅側偍丄BeiDou偺応崌丄GEO塹惎
(B1, B2, B3, B4) 偼怣崋傪庴怣偟偰偄偰傕丄RTCM3
1127 (BeiDou MSM7) 偲偟偰偼弌椡偝傟側偄條偩丅偙傟偑巇條側偺偐丄晄嬶崌側偺偐偼晄柧丅傑偨丄QZSS傕庴怣偟偰偄傞偑丄RTCM3
1117 (QZSS MSM7) 偑傑偩枹僒億乕僩偱丄婎弨嬊僨乕僞偲偟偰偼弌椡偱偒側偄丅RTCM3
1097 (Galileo MSM7) 偺僒億乕僩傪娷傔丄偙偺曈偼崱屻偺F/W峏怴傪懸偮昁梫偑偁傞丅
(e) RTCM3儊僢僙乕僕偑弌椡偝傟偰偄傞偐偺妋擣偼丄RTKLIB偺RTKNAVI傪婲摦偟丄Input
Streams - Rover - Type傪NTRIP Client丆Format偲偟偰RTCM
3丄Opt偱NTRIP Caster Host偲偟偰嬻敀傑偨偼localhost丄Port偲偟偰2101丄Mountpoint偲偟偰
(c) 偺愝掕抣丄User-ID, Password偼側偟丄偵愝掕丅Start傪墴偟丄塃忋堦斣嵍偺椢儔儞僾偑揰柵偡傞偙偲丄RTK
Monitor - (1) Rover 偱僼僅乕儅僢僩偲偟偰RTCM
3傪慖傫偱丄RTCM 1077, 1087, 1005儊僢僙乕僕偺擖椡傪妋擣偡傞丅
(f) 揹尮傪愗偭偰傕埲忋偺愝掕傪曐帩偟偨偄応崌偼丄Configuration
View偺 CFG (Configuration) - Save current
configuration傪慖戰偟偰丄Send丅
(4) 儘乕僶 (堏摦嬊) 偲偟偰偺愝掕 (M8P-0傑偨偼M8P-2)
(a) u-center 儊僯儏乕 Receiver - NTRIP Server/Caster傪幚峴偟NTRIP
Caster傪掆巭丅
(b) Configuration View偺丄Msg (Message) 偱F5-05
RTCM3.2 1005傪巒傔丄RTCM儊僢僙乕僕偺USB On
偺僠僃僢僋傪偼偢偟丄Send丅慡晹偺RTCM儊僢僙乕僕弌椡傪掆巭丅
(c) NMEA弌椡傪桳岠偵偡傞丅(b) 偲摨條偵丄F0-00
NMEA GxGGA, F0-03 NMEA GxGSV, F0-04 NMEA
GxRMC 偺USB傪僠僃僢僋偟偰丄Send丅傑偨丄Configuration
View偺丄NMEA (NMEA Protocol) 偺Mode Flags偺
High precision mode 傪僠僃僢僋偟偰丄Send丅偙傟偱NMEA偲偟偰弌椡偝傟傞彫悢揰寘悢傪憹傗偟偰應埵夝偺埵抲暘夝擻傪忋偘傞丅
(d) Configuration View偺TMODE3 (Time Mode
3) 偺Mode傪0 - Disabled偵愝掕丅Message View偺UBX
- NAV - PVT偺Position Fix Type偑TIME偐傜3D
Fix偵曄傢傞偙偲傪妋擣丅
(e) Configuration View偺DGNSS (Differential
GNSS configuration) 偺Differential mode偑3
= RTK fixed Ambiguities are fixed whenever
possible偵愝掕偟丄Send丅(僨僼僅儖僩偱偼婛偵偙偺愝掕偵側偭偰偄傞偼偢)丅埲忋偱婎弨嬊僨乕僞傪庴怣偡傟偽RTK儌乕僪偱丄擖椡偝傟側偗傟偽扨撈應埵儌乕僪偱摦嶌偡傞條偵側傞丅
(e) 婎弨嬊NTRIP僉儍僗僞傪梡堄偡傞丅RTKLIB偺STRSVR偱u-blox偺UBX-RXM-RAWX傪RTCM
3偵曄姺偟偨応崌丄M8P懁偱惓忢偵FIX偟側偄栤戣偑偁傞條側偺偱丄偙偙偱偼婎弨嬊梡偵傕偆堦戜M8P-2傪梡堄偟丄(3)
偺庤弴偱NTRIP caster偲偟偰摦嶌偝偣傞傕偺偲偡傞丅幚嵺偵偼堦嶐擭偺僒儅乕僗僋乕儖梡偵梋偭偨M8P-2
儈僯EVK儃乕僪傪丄(1) 偺庤弴偱F/W傪HPG1.40REF偵峏怴偟偰丄NTRIP僉儍僗僞偲偟偰巊梡偟偨丅RTKLIB偺RTCM3弌椡偱惓忢摦嶌偟側偄栤戣偼挷嵏拞丅
(f) 儊僯儏乕Receiver - NTRIP Client...傪幚峴丅NTRIP
caster settings偺Address偲偟偰localhost,
Port偲偟偰 (2) (c) 偱巜掕偟偨億乕僩斣崋丄傪愝掕偟丄Update
source table傪墴壓丅惓忢偵愙懕偱偒傟偽丄NTRIP
mount point偲偟偰 (2) (c) 偱愝掕偟偨儅僂儞僩億僀儞僩偑昞帵偝傟傞丅椺偊偽NTRIP
caster愝掕偑娫堘偭偰偄傞応崌偼丄NTRIP mount
point偵Retrieving...偲偱偰丄彮偟偟偰僞僀儉傾僂僩偟嬻敀偲側傞丅儅僂儞僩億僀儞僩傪巜掕偟偰OK丅偙傟偱NTRIP僉儍僗僞偵愙懕偟偰RTCM3儊僢僙乕僕傪庴怣偡傞傛偆偵側傞丅
(g) RTCM3儊僢僙乕僕傪庴怣偟偰偄傞偐偳偆偐偼丄Message
View偺UBX - NAV - SVINFO傪尒偰丄懳徾塹惎偺DGPS偺抣偑Y
(椢) 偵側偭偰偄傞偙偲偱妋擣偡傞丅傑偨偼 UBX
- NAV - SAT傪尒偰丄懳徾塹惎偺DGNSS, Correction
source, Correction used偑偦傟偧傟丄Y, RTCM,
PR+CR偲側偭偰偄傞偙偲傪妋擣偡傞丅UBX - RXM
- RTCM (RTCM input status) 偲偄偆儊僢僙乕僕偑偁傞偺偩偗偳丄偳偆傕偙傟偼RTCM2梡偱M8P偱偼弌椡偝傟側偄條偩丅
(h) 婎弨嬊僨乕僞傪庴怣偡傞偙偲偵傛傝丄應埵儌乕僪偑RTK偵愗傝懼傢傞偙偲偼丄Message
View偺 UBX - NAV - PVT 偺 Fix Flags 偑 FixOK
DGNSS 偵丄Carrier Range Status偑Float傑偨偼Fixed偵側傞偙偲偱妋擣偡傞丅傾儞價僊儏僀僥傿偑夝偗傟偽丄偙偺抣偑Float偐傜Fixed偵曄壔偡傞丅偙偙偱偼僛儘婎慄
(傾儞僥僫弌椡傪僗僾儕僢僞偱婎弨嬊丄儘乕僶椉幰偵擖椡)
偱摦嶌帋尡偟偨偺偱悢僄億僢僋偱Fixed偵曄傢偭偨偑丄幚嵺偺娐嫬偱偼傾儞僥僫丄廃曈忈奞暔丄婎慄挿丄巊梡GNSS摍偺忦審偵傛偭偰Fixed偵側傞傑偱偺帪娫偼戝偒偔曄摦偡傞
(嵟埆丄Fix偟側偄)丅
(i) Carrier Range Status偑Fixed偺忬懺偐傜丄妋擣偺偨傔婎弨嬊僨乕僞傪巭傔偰傒傞丅婎弨嬊懁偺M8P偵愙懕偝傟偨u-center偺儊僯儏乕Receiver
NTRIP sever/caster...傪幚峴丅偟偽傜偔偼Fixed傪堐帩偡傞偑栺60昩偱Carrier
Range Status偑 Not used 偵丄Fix Flags偑 FixOk
偵曄傢傞丅UBX - NAV - SVINFO 偺懳徾塹惎偺DGPS傕
N (愒) 偵曄傢傞丅UBX - NAV - SAT 偺DGNSS,
Correction source, Correction used 傕丄N,
None, - 偵曄傢傞丅
(j) NTRIP caster傪嵞棫偪忋偘偟偨応崌偱傕丄u-center偺NTRIP
caster偼帺摦嵞愙懕傪偟偰偔傟側偄條偱丄儊僯儏乕Receiver
- NTIP Client... 傪2搙幚峴偟偰嵞搙愙懕偡傞昁梫偑偁傞丅
(k) 揹尮傪愗偭偰傕埲忋偺愝掕傪曐帩偟偨偄応崌偼丄(2)
(f) 偲摨條庤弴偱愝掕傪僼儔僢僔儏偵彂偒崬傓丅
埲忋偺M8P偵傛傞RTK偺愝掕庤弴偱偁傞偑丄M8P偲u-center偺慻崌偣偱RTK偺摦嶌妋擣偼偱偒傞偑丄儘乕僶懁偺RTK偵傛傞應埵夝傪奜晹偵儕傾儖僞僀儉弌椡偡傞偙偲偑偱偒側偄 (u-center偺儘僌婡擻偱儘僌僼傽僀儖偵曐懚偡傞偙偲偼偱偒傞)丅M8P偵僔儕傾儖億乕僩 (USB傑偨偼UART) 偑2億乕僩偁傞応崌偼丄1億乕僩傪u-center愙懕偲婎弨嬊僨乕僞擖椡梡偵丄1億乕僩傪應埵夝弌椡梡偵妱傝摉偰傟偽椙偄丅僒儅乕僗僋乕儖梡偺M8P 儈僯EVK儃乕僪偱偼丄偦偺曈偺巊偄彑庤傪峫偊偰丄M8P偵FTDI偺UART-USB曄姺僠僢僾傪捛壛偟偰丄USB 2億乕僩偵偟偰傕傜偭偨丅偨偩丄僩儔媄 乽RTK僗僞乕僞僉僢僩乿偺條偵USB 1億乕僩偟偐擖弌椡億乕僩偑側偄応崌丄偳偆偡傟偽椙偄偐丅偙傟偵偼RTKLIB 2.4.3偺STRSVR傪巊偆丅
(5) 儘乕僶 (堏摦嬊) RTK應埵夝偺奜晹弌椡 (M8P-0傑偨偼M8P-2)
(a) (3) 偺庤弴偵傛傝丄u-center偱M8P偺儘乕僶愝掕傪峴偄丄RTK摦嶌傪妋擣丅妋擣屻丄u-center偺儊僯儏乕
Receiver - Port - Disconnect傪幚峴偟丄M8P偲偺愙懕傪愗傞丅
(b) RTKLIB 2.4.3 b30 STRSVR傪幚峴丅(0) Input
- Type 偲偟偰NTRIP Client傪慖戰丄Opt傪墴偟偰NTRIP
Client Option傪昞帵丅NTRIP Caster Host偲偟偰localhost丄Port偲偟偰
(3)(c) 偱愝掕偟偨億乕僩丄Mountpoint偲偟偰
(3)(c) 偱愝掕偟偨mount point丄User-ID偲Password偼嬻敀偵愝掕偟丄OK丅
(c) STRSVR偺 (1) Output - Type偲偟偰Serial傪慖戰丅Opt偱Serial
Options傪昞帵丅Port偲偟偰儘乕僶M8P傪愙懕偟偰偄傞億乕僩丄Output
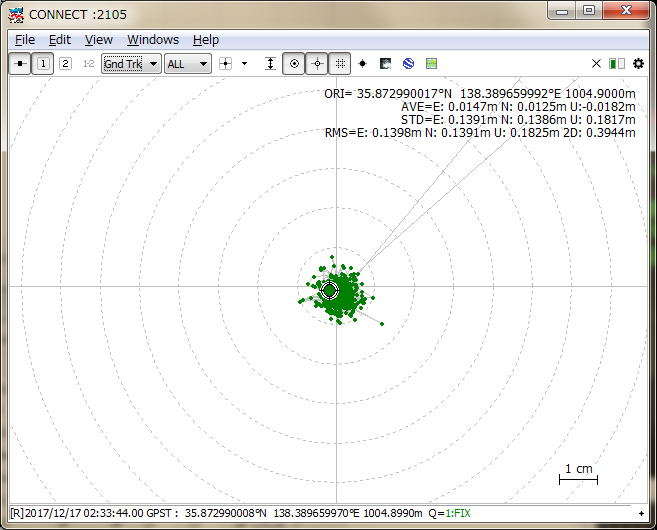
Received Stream to TCP Port傪僠僃僢僋丄揔摉側TCP億乕僩斣崋傪擖椡丄偙偙偱偼2105偲偡傞丅OK丅Start傪墴偟偰STRSVR傪幚峴丅Input丄Output嵍懁偺椢僀儞僕働乕僞偑椉曽偲傕揰柵偡傟偽OK丅偙傟偱u-center偺NTRIP
caster偲愙懕偟偰丄婎弨嬊僨乕僞傪庴怣偟偰丄USB宱桼偱偙偺僨乕僞傪M8P偵憲怣偟丄摨帪偵M8P偐傜RTK應埵夝傪庴怣偟偰丄巜掕偟偨TCP僒乕僶億乕僩宱桼偱夝傪奜晹弌椡偡傞偙偲偑偱偒傞丅
(d) 偁偲偼揔摉側TCP僋儔僀傾儞僩偱 (c) 偱巜掕偟偨TCP億乕僩偵愙懕偡傟偽丄M8P偱應埵偟偨RTK夝傪NMEA僼僅乕儅僢僩偱庴怣偱偒傞丅偙偙偱偼椺偲偟偰RTKLIB
RTKPLOT偱庴怣偟偰昞帵偟偰傒傞丅RTKPLOT傪婲摦丅儊僯儏乕
File - Connection Settings傪幚峴丅Stream
Type偲偟偰TCP Client傪慖戰丅TCP Client Options偺TCP
Server Address偲偟偰localhost, Port偲偟偰
(c) 偱巜掕偟偨TCP億乕僩斣崋傪巜掕丄OK丅Solution
Format偲偟偰NMEA0183傪慖戰丄OK丅RTKPLOT偺儊僯儏乕
Connect傪幚峴丅偆傑偔峴偗偽丄偙傫側姶偠偱RTKPLOT忋偵M8P偱應埵偟偨RTK夝偑弌椡偝傟傞丅
...................................................................................................................................
QZSS奣嫷: 曄傢傜偢丅8/19偺QZS-3偺懪偪忋偘偐傜4僇寧嬤偔丄傑偩傾儔乕僩偼夝彍偝傟側偄丅傕偟偐偡傞偲擭傪墇偡偐傕丅偲偄偭偰傕丄尰嵼丄QZS-3偺怣崋 (PRN199) 傪捛旜偱偒傞庴怣婡傎偲傫偳側偄偺偱丄抶傟偰傕丄儐乕僓偵戝偟偨塭嬁偼側偄偐傕偟傟側偄丅
-------------------------------------
傗偭偲丄僩儔媄1寧崋偲乽RTK僗僞乕僞僉僢僩乿(M8P-2偺TGRTK-A) 傪擖庤丅
M8P儃乕僪偺傾儞僥僫僷僞乕儞偑嵶偄偺偑偪傚偭偲婥偵側傞偑丄傑偁丄抁偄偟戝忎晇偱偟傚偆丅側偍傾儞僥僫偺儅僀僋儘僗僩儕僢僾儔僀儞偵偮偄偰偼丄彮偟慜偺僀儞僥僌儗乕僔儑儞儅僯儏傾儖 (椺偊偽LEA-6 2.5.2-2.5.4) 偵偼愝寁忋偺嵶偐偄拲堄偑彂偐傟偰偄偨偑丄M8P偺儅僯儏傾儖 (嶲徠) 偐傜偼徣偐傟偰偄傞條偩丅

...................................................................................................................................
AliExpress偱丄Trimble BD982偑$1299.99偱弌偰偄傞偺傪尒偮偗偨 (嶲徠)丅偲偰傕柪偭偨偺偩偗偳丄寢嬊拲暥偟偰偟傑偭偨丅怓乆偲儕僗僉乕側偺偩偗偳庴怣婡僐儗僋僞乕偲偟偰偼Trimble 1戜埵偼帩偭偰偄偨偄偟丅BD982偺僨乕僞僔乕僩丅HW揑偵偼220 CH Maxwell 6 x 2 偺dual-antenna heading懳墳丅2廡娫埵偱撏偔偼偢側偺偱丄惓寧偼偙傟偱梀傫偱傒偨偄丅(惓捈丄庴怣婡攦偄偡偓偩傠丄偲偄偆榖偼偁傞)
-------------------------------------
偟偐偟丄堬忛崅愱 壀杮愭惗偺婰帠偼丄弶怱幰偵傕暘偐傝傗偡偄丄偐備偄偲偙傠偵庤偑撏偔崸愗挌擩側愢柧偱丄摢偑壓偑傞丅
-------------------------------------
僩儔媄, 婰帠僒億乕僩 - 慡崙偱1cm應埵 ! RTK-GPS
乽RTK僗僞乕僞僉僢僩乿傪偛峸擖偺曽偼丄摿偵乽僉僢僩晅懏偺傾儞僥僫偵偮偄偰乿傪椙偔撉傑傟傞條偵丅
乽尰嵼丄RTKLIB偱曄姺偟偨RTCM3傪M8P偑擣幆偱偒側偄晄嬶崌偑偱偰偄傞乿偲偺偙偲丅u-blox - RTCM曄姺晄嬶崌偼偙偙偱巜揈偝傟偰偄傞栤戣偵婲場偡傞壜擻惈偑偁傞丅(u-blox偺惗僨乕僞丄帪崗僞僌偵抂悢偑弌傞傫偩傛偹丅偙傟怓乆偲晄搒崌側偺偱帪崗僞僌曗惓傪擖傟偨傫偩偗偳丄曗惓偡傞偲暿偺晄嬶崌偑偱偰丄栠偟偨宱堒偑偁傞) 偙傟偼庤尦偵RTK僗僞乕僞僉僢僩偑撏偄偰偐傜嵞挷嵏偟丄梫偡傟偽岞幃僷僢僠傪儕儕乕僗偡傞梊掕丅
-------------------------------------
偙傟傕丄朸僽儘僌偺婰帠傪堷梡丅
> 傑偨乽CLAS偑偱偰偔傞偺偩偐傜儘乕僇儖側RTK偼晄梫乿偲幮撪偱尵傢傟偰愢柧偵崲偭偰偄傞偲偺憡択偁傝丏
> 扨弮偵朸崙塩曻憲偺曬摴傪庴偗偰偺敾抐偩偲巚偄傑偡偑丆彮側偔偲傕寶愝宯偱應検儗儀儖偺惛搙傪梫媮偡傞
> 梡搑偵偼尩偟偄僗儁僢僋偱偡丏儐乕僓偵傛傞CLAS偺昡壙幚尡戞堦抏偼姰椆偟偰偄傞柾條丆嬤擔拞偵惛搙昡壙
> 偺寢壥偑偱偰偔傞偺偱怓乆側堄枴偱婜懸偟偰懸偪偨偄偲巚偄傑偡丏椺偊惛搙偑棊偪偰應検儗儀儖偱巊偊側偄偲
> 偟偰傕丆惛搙偵崌傢偣偨怴偟偄巊偄曽傪柾嶕偡傟偽椙偄偼偢偱偡丏惐傒暘偗傪採彞偡傞恖傕偄傑偡丏
巹傕偦偆巚偄傑偡丅尨棟揑偵尵偭偰丄惈擻偑丄RTK > VRS > CLAS丄偲側傞偺偼摉慠丅 摿偵CLAS偱偼塹惎夞慄偺懷堟惂尷偐傜丄棙梡塹惎悢偑13婡 (?) 埲壓偵尷掕偝傟傞偺偑尩偟偔丄忈奞暔偺懡偄搒巗晹偱偼偙偺惈擻嵎偑昞傟傗偡偄偩傠偆偲梊憐偟偰偄傑偡丅
曗懌:乽RTK乿偲偄偭偰傕婎慄挿偱惈擻慡慠堘偆偟丄偲偄偆偮偭偙傒偑偁傞偐傕丅埲忋偺乽RTK乿偼婎慄挿10km埲壓偲偄偆偙偲偱丅(10km偩偲丄RTK 亞 VRS丄偐傕) (17:50捛婰)
-------------------------------------
BeagleBone偺彫宆斉偲偄偆姶偠丅1GHz ARM Cortex-A8 + RAM 512MB + microSD丅35 x 56 mm丄$25丅RasPi Zero W偺條偵HDMI, BT, WiFi偼側偄偑丄慻傒崬傒梡偵偼僔儞僾儖偱巊偄傗偡偦偆丅僨傿僗僐儞偵側偭偨Intel Edison偺抲偒姺偊偵傕丅M8T偺働乕僾扤偐嶌偭偰偔傟傞偲丄偡偖偵彫宆RTK庴怣婡偵側傞偺偩偗偳丅
...................................................................................................................................
NASASpaceFlight.com, Ariane 5 ES lofts another set of Galileo quadruplets, December 12, 2017
2017/12/12 18:36 UTC丄4婡偺Galileo塹惎 (FOC-15, 16, 17, 18)丄僼儔儞僗椞僊傾僫 僋乕儖乕塅拡婎抧傛傝丄Ariane 5 ES儘働僢僩偱懪偪忋偘丅惉岟偺柾條丅Galileo塹惎偺懪偪忋偘偲偟偰偼嶐擭11/17埲棃丄梊掕婳摴搳擖偵幐攕偟偨FOC-1, 2塹惎傪娷傔偰19, 20, 21, 22婡栚丅偙傟偱婳摴忋偺Galileo塹惎偼丄IOV塹惎4婡丄FOC塹惎18婡偺丄寁22婡丅夁嫀懪偪忋偘傜傟偨塹惎偺僗僥乕僞僗偼偙偙嶲徠丅尰嵼14婡偺塹惎偑USABLE偲偝傟偰偄傞丅師偺懪偪忋偘偼枹掕丅僼儖僔僗僥儉 (24婡+僗儁傾) 偺姰惉偼2020擭偵梊掕偝傟偰偄傞丅
曗懌: InsideGNSS偺婰帠偵傛傞偲丄師偺懪偪忋偘偼2018擭拞弡偵Ariane 5偱4婡丅傑偨丄婳摴忋梊旛婡偺悢偩偑丄偙偺婰帠偱偼乽2婡乿偲偁傞偑丄3僾儗乕儞偵1婡偯偮崌寁3婡丄婳摴忋崌寁24 + 3 = 27婡偺偼偢丅挷払嵪傒偺塹惎偼26婡偩偑丄6寧偵8婡偺捛壛惢憿宊栺偑寛傑偭偰偄傞 (嶲徠) 偺偱丄2020擭傑偱偵丄梊掕婳摴搳擖偵幐攕偟偨2婡丄尨巕帪寁屘忈偺暋悢婡偺戙懼婡傕懪偪忋偘傞壜擻惈偑偁傞丅(12/17捛婰)
...................................................................................................................................
ESA, Watch the launch of Galileos 19-22, December 11, 2017
2017/12/12 18:36 UTC偵梊掕偝傟偰偄傞丄Galileo 僋傾儖僥僢僩懪偪忋偘拞宲僒僀僩丅拞宲偼18:10 UTC偐傜丅
-------------------------------------
QZSS奣嫷: 2017/12/12 12:37 UTC尰嵼 QZS-2 傾儔乕僩ON
(QZS-1偼枹妋擣)丅壗傜偐偺忈奞偱偼側偄偐偲悇嶡偝傟傞偑丄NAQU偼傑偩敪峴偝傟偰偄側偄丅
曗懌: 12:55 UTC尰嵼 QZS-2 傾儔乕僩OFF丅徻嵶偼儘僌傪夝愅偟偰傒側偄偲暘偐傜側偄偑丄庴怣婡懁偺岆摦嶌偺壜擻惈傕偁傞丅(10:55捛婰)
...................................................................................................................................
T.Areeyapinun, GNSS Logger Unit with RTKLIB
儔僘僷僀偲ublox M8T傪巊偭偨GNSS惗僨乕僞儘僈乕偺惢嶌丅惷壀戝 栘扟愭惗偺尋媶幒偱幚嵺巊偭偰偄傞傜偟偄丅
...................................................................................................................................
QZSS奣嫷: 曄傢傜偢丅QZS-3 (PRN199) 偺傾儔乕僩夝彍偼傑偩丅
-------------------------------------
YouTube, CQTV 僩儔媄僯儏乕僗
堬忛崅愱偺壀杮愭惗偲妛惗偝傫丅
...................................................................................................................................
僩儔媄偺僺儞億僀儞僩GPS僠儏乕僫DIP僉僢僩B (TGRTK-B) 側傫偩偗偳丄幨恀傪尒傞尷傝丄晅懏傾儞僥僫偼偙傟偐側偁丅傕偟丄偙傟偩偲偡傞偲丄GPS偟偐庴偐傜側偄偺偱丄RTK偺惈擻偑弌側偄偲巚偆丅掅壙奿RTK偺掕斣傾儞僥僫偼Tallysman TW2710偩偗偳丄\1枩埲忋偼偡傞 (嶲徠) 偺偱偪傚偭偲崅偄丅\2000埵偱攦偊偰丄GLONASS, BeiDou懳墳偱丄偐偮RTK惈擻偑偦傟側傝偵弌傞傾儞僥僫偭偰側偄偐偟傜丅
曗懌: 曇廤晹偵妋擣偟偨偲偙傠丄晅懏傾儞僥僫偱堦墳BeiDou偼庴偐傞偲偺偙偲偱偁傞丅偳傟偔傜偄惈擻偑偱傞偐偼丄崱屻昡壙偡傞梊掕丅(2寧偵僙儈僫傗傜偹偽側傜側偄偺偱) (12/14捛婰)
...................................................................................................................................
乽島巘幚墘! 僉僢僩傪帩偪婣傟傞僙儈僫乿2018擭2寧14擔梊掕偱偡丅
-------------------------------------
RTKLIB傪Android偵堏怉偟偰丄Android Raw GNSS measurement API傪巊偆偲偟偰丄(惈擻偼暿偵偟偰傕) 僗儅儂偱偺崅惛搙應埵偼怓乆偲僴乕僪儖偑崅偄丅椺偊偽峲朄僨乕僞偩偑丄P10偺GNSSLogger偺弌椡傪尒偰傒傞偲丄偳偆傕GPS偩偗偟偐弌椡偝傟側偄條偩丅GPS埲奜偼怣崋傪捛旜偟偰偄偰傕峲朄僨乕僞偑弌椡偝傟側偄 (API偱偼丄GPS, GLONASS, Galileo, BeiDou偺峲朄僨乕僞偺ID偼掕媊偝傟偰偄傞偑丄幚偼QZSS偼枹掕媊)丅僗儅儂偺懡偔偼A-GNSS偵懳墳偟偰偄傞偺偱丄徚旓揹椡掅尭偺偨傔峲朄僨乕僞傪暅挷偟偰偄側偄壜擻惈傕偁傞丅椺偊偽丄崅惛搙應埵偺偨傔偺MADOCA傗CLAS曗嫮忣曬偱偼丄曻憲僄僼僃儊儕僗偐傜偺嵎暘検偟偐憲傜傟側偄偺偱丄寢嬊GPS埲奜偺曗嫮忣曬偼巊偄條偑側偄丅側偍丄嵟嬤偺A-GNSS偼丄懡偔偼儀儞僟僾儘僾儔僀僄僞儕偺挿庻柦僄僼僃儊儕僗側偺偱僄僼僃儊儕僗偺戙懼偲偟偰偼巊偊側偄丅"duty cycling" 偺栤戣偲偄偄丄桳傞掱搙帺桼偵傾僾儕偐傜GNSS僠僢僾僙僢僩偺僐儞僩儘乕儖傪偟偨偄栿偱偁傞偑丄彮側偔偲傕尰峴偺API偱偼傎傏偱偒側偄丅傕偪傠傫丄彨棃揑偵偙傟傜偼Android API偺婡擻捛壛傗GNSS僠僢僾僙僢僩僪儔僀僶偺峏怴偱懳墳偝傟傞壜擻惈偼偁傞偑丅偲偄偆偙偲偱丄惗僨乕僞API偑岞奐偝傟偨埵偱丄偡偖偵僗儅儂偱僙儞僠儊乕僞應埵偑弌棃傞傢偗偑側偄偺偱偁傞丅
-------------------------------------
Android偱摦偔RTKLIB偲尵偊偽丄RTKNAVI傪傎傏偦偺傑傑Android偵堏怉偟偨丄RTKGPS+ (嶲徠) 偑懡暘堦斣儊僕儍乕側栿偩偑丄尰嵼偺奐敪忬嫷傪偪傚偭偲挷傋偰傒偨丅忋偼GitHub偺僆儕僕僫儖儕億僕僩儕丅儊僯儏乕偺 Insights - Network 偱丄僆儕僕僫儖偐傜僼僅乕僋偟偨儕億僕僩儕偺峏怴忬嫷傪挷傋傞偙偲偑偱偒傞丅偙傟傪尒傞偲嵟嬤嵟傕昿斏偵峏怴偟偰偄傞偺偼丄GPSFan偝傫偺僼僅乕僋偱丄2.4.3 b29傑偱偺峏怴偵偼懳墳偟偰偄傞傜偟偄丅偨偩丄Android Raw GNSS measurements API偵偼傑偩懳墳偟偰偄側偄條偩丅偲偄偆偙偲偱丄偙偙偐傜怴偟偄僼僅乕僋傪嶌傝丄儀乕僗偲偡傞偺偑堦斣憗偄偐側偁丅
...................................................................................................................................
12/9敪攧僩儔媄1寧崋RTK摿廤偺栚師偑Amazon (嶲徠) 偵丅埲壓堷梡丅奆丄婥崌偄偑擖偭偰傑偡丅價僢僋儕儅乕僋偑偄偔偮偁傞傫偩 (徫)丅岊偆偛婜懸丅
> 價僢僌僨乕僞杮柦 墧昅偺摦偒傕傢偐傞崅惛搙應埵媄弍傪懱尡
> 乽抧媴戝幚尡 僺僞儕1cm両 怴GPS抋惗[CD晅偒]乿
>
> 仢帺摦塣揮丆僪儘乕儞戭攝丆杮恖擣徹丆掋嶡乧
> 丂僾儘儘乕僌嘆 1僙儞僠捛愓&堏摦惂屼両
怴GPS乽RTK乿僾儘僕僃僋僩
> 仢RTK壗偱傕懳墳傾僾儕偐傜帺嶌傾僯儊偺僒億乕僩傑偱
> 丂僾儘儘乕僌嘇 懱尡1僙儞僠應埵両 晅榐CD-ROM偺僐儞僥儞僣
> 仢傕偆傗偭偰傞恖偨偔偝傫偄傑偡両 100枩墌媺偺柌偺媄弍偑屄恖偱巊偊傞
> 丂戞1榖 昅傪捛愓両 怴GPS應埵媄弍乽RTK乿偺幚椡偲墳梡
> 仢揷傫傏傾乕僩偵傕両丠 應埵忣曬傪傕偲偵僴儞僪儖傪帺摦憖廲
> 丂戞2榖 1僙儞僠丒儕傾儖僞僀儉應埵偺墳梡嘆
柍恖僩儔僋僞
> 仢嶳摴偺忋傝壓傝傕崅惛搙捛愓両 娤岝價僕僱僗偵堦栶
> 丂戞3榖 1僙儞僠丒儕傾儖僞僀儉應埵偺墳梡嘇
恖娫僩儗乕僒
> 仢塅拡偐傜栄昅偺摦偒傪姰僐僺両
> 丂戞4榖 1僙儞僠丒儕傾儖僞僀儉應埵偺墳梡嘊
彂摴僗僉儍僫
> 仢惻嬥愡栺両 楬柺偺撌墯傪旔偗傞晄帺慠側憱傝偐傜楬柺偺寚娮傪敪尒両
> 丂戞5榖 1僙儞僠丒儕傾儖僞僀儉應埵偺墳梡嘋
僶僀僋丒僩儗乕僒
> 仢偁側偨偺奨偵GPS RTK婎弨嬊傪両
> 丂戞6榖 擔杮慡崙1僙儞僠丒儕傾儖僞僀儉應埵僾儘僕僃僋僩傊偺桿偄
> 仢Windows PC 傗儔僘僷僀偲USB偱両 PIC
傗Arduino 偲I2C/UART偱両
> 丂戞7榖 RTK應埵僄儞僕儞搵嵹両 1cm應埵懳墳GPS儗僔乕僶
NEO-M8P
> 仢PC 傗儔僘僷僀偵USB愙懕両 儅僀僐儞偲僔儕傾儖/I2C
愙懕両
> 丂戞8榖 悢検尷掕両 傾儞僥僫擖傝偺僺儞億僀儞僩GPS僠儏乕僫DIP僉僢僩
> 仢婎弨嬊偵傕堏摦嬊偵傕巊偊傞傛偆偵
> 丂戞9榖 RTK儗僔乕僶NEO-M8P偺儌乕僪愝掕
> 仢昞帵惂屼丆應埵寁嶼偐傜僨乕僞捠怣傑偱丆RTK偺偙偲側傜壗偱傕
> 丂戞10榖 僼儕乕偺應埵傾僾儕RTKLIB傪PC偵僙僢僩傾僢僾偡傞
> 仢寁嶼寢壥傪昞帵偡傞傾僾儕RTKPLOT偱價僕儏傾儖壔
> 丂戞11榖 應埵寁嶼傪幚峴偟偰尰嵼埵抲傪昞帵偡傞
> 仢愝掕偼偨偭偨偺2偐強両 晅榐CD-ROM 偺傾僾儕RTKLIB偱嬌妝奐嬊
> 丂戞12榖 GPS儌僕儏乕儖NEO-M8P偱嶌傞My婎弨嬊
> 仢CD-ROM廂榐偺RTKLIB 傾僾儕乽STRSVR乿偱僨乕僞傪帺摦傾僢僾
> 丂戞13榖 僒乕僶愝掕偑柍棟側傜乧GPS梡僒乕僶NTRIP
Caster偵愙懕
> 仢椡傪崌傢偣偰擔杮慡崙1cm應埵払惉両
> 丂戞14榖 僆乕僾儞婎弨嬊偺棙梡朄偲My婎弨嬊偺岞奐偺巇曽
> 仢枅昩峏怴両 2017擭6寧偐傜惷壀戝妛昹徏僉儍儞僷僗偱僒乕價僗奐巒両
> 丂戞15榖 巹偺僆乕僾儞RTK婎弨嬊
> 仢婎弨揰僨乕僞傪塅拡偵UP偟偰弨揤捀塹惎偐傜慡搚偵曻憲
> 丂戞16榖 奀偺忋偱傕僙儞僠丒儊乕僩儖両
My婎弨嬊晄梫偺師悽戙RTK
> 仢2 偮偺應埵弌椡嘆崅懍夝乽Float乿偲嘇崅惛搙夝乽Fix乿偺廂懇懸偪帪娫偵傕攝椂
> 丂戞17榖 摂戜壓埫偟両 1擔扨埵偱曄壔偡傞戝偒側挿婜岆嵎偵拲堄両
> 仢僼儕乕偺Windows傾僾儕奐敪娐嫬Visual
Studio偱僆儕僕僫儖夵憿OK
> 丂戞18榖 僜乕僗僐乕僪丒僆乕僾儞両 應埵寁嶼僄儞僕儞乽RTK僐傾乿
> 仢抧妅曄摦偱擔乆曄壔偡傞嵗昗偵儈儕丒儊乕僩儖丒僉儍儕僽儗乕僔儑儞両
> 丂戞19榖 崙搚抧棟堾偺揹巕婎弨揰偵僠儏乕儞両
My婎弨嬊偺峑惓
> 仢塹惎偺埵抲/曽埵/ 嬄妏偲揹棧憌傗懳棳寳偵傛傞抶墑検傪寁嶼
> 丂戞20榖 僆乕僾儞應埵僄儞僕儞乽RTK僐傾乿嘆
GPS僨乕僞偺慜張棟
> 仢暷崙GPS丆擔杮QZSS丆拞崙BeiDou乧悽奅偺GNSS傪僼儖妶梡
> 丂戞21榖 僆乕僾儞應埵僄儞僕儞乽RTK僐傾乿嘇
GPS塹惎偲偺嫍棧寁嶼
> 仢1 僙儞僠惛搙偺僲僂僴僂戝岞奐
> 丂戞22榖 僆乕僾儞應埵僄儞僕儞乽RTK僐傾乿嘊
GPS揹攇偺埵憡嵎寁嶼
> 仢悢愮枩墌偺儊乕僇惢傪僼儕乕僂僃傾偲僨傿僕僞儖丒儔僕僆丒僉僢僩偱3枩墌惢嶌両
> 丂戞23榖 壆撪偱幚尡両 抧媴慡堟GPS庴怣僼傿乕儖僪丒僔儈儏儗乕僞
曗懌: 栚師丅(12/7捛婰)
-------------------------------------
QZSS, 崅惛搙應埵曗嫮媄弍 (MADOCA) 偺媄弍幚徹傪奐巒, 2017擭12寧6擔
GPAS, 弨揤捀塹惎偵傛傞崅惛搙應埵曗惓媄弍 (MADOCA)
偺幚徹幚尡傪奐巒, 暯惉29擭12寧6擔
偙傟偲偭偔偵曻憲偼奐巒偝傟偰偄傞傫偩偗偳丄壗傪偄傑偝傜偲偄偆姶偠丅(2017/3/29偐傜9/22傑偱偼丄QZS-1 L6D (PRN193) 偱丄媽JAXA MADOCA-PPP宍幃偱丄2017/9/22偐傜尰嵼傑偱偼丄QZS-2 L6E (PRN204) 偱丄惓婯MADOCA-PPP宍幃偱) 側偍丄崱挬偺抜奒偱QZS-2 L6E (PRN204) 偺傾儔乕僩僼儔僌偼棫偭偨傑傑丅帋尡僒乕價僗奐巒慜偺QZS-3, 4 L6E (PRN209, 205) 偱偼憡曄傢傜偢CLAS偑曻憲偝傟偰偄傞丅
GPAS僂僃僽僒僀僩偺乽L6E幚徹僨乕僞僼僅乕儅僢僩巇條彂乿 (嶲徠) 偵傛傞偲丄曗嫮懳徾塹惎偼GPS丄GLONASS丄偍傛傃QZSS偱偁傝丄Galileo偲BeiDou偼娷傑傟偰偄側偄丅傑偨丄曗嫮撪梕偲偟偰PPP-AR偺偨傔偺FCB夝傕娷傑傟偰偄側偄丅偝傜偵丄尰嵼憲傜傟偰偄傞婳摴丄帪崗曗惓忣曬丄URA偵偼丄QZS-2偺傕偺偼娷傑傟偰偄側偄 (QZS-1偺傒)丅QZS-2偺帋尡僒乕價僗偑奐巒偝傟偰偐傜婛偵2僇寧埲忋宱夁偟偰偍傝丄憗媫偵曗嫮懳徾塹惎偲偟偰QZS-2偑捛壛偝傟傞偙偲傪朷傓丅傑偨丄傾乕僇僀僽僨乕僞 (嶲徠) 偵傕MADOCA偑捛壛偝傟傞偙偲傪朷傓丅
偲怓乆偲彂偄偨偑丄岞幃敪昞偝傟偨偲偄偆偙偲偼彊乆偵娐嫬偑惍旛偝傟偮偮偁傞偲偄偆偙偲偱偁傝丄幚梡壔偵岦偗偨戞堦曕傪摜傒弌偟偨偲偄偆堄枴偱丄屆嶲娭學幰偺堦恖偲偟偰偼慺捈偵婌偽偟偄丅
-------------------------------------
Android Developers, Raw GNSS Measurements
Android devices that support raw GNSS measurements 偺昞偑峏怴偝傟丄QZSS傪僒億乕僩偡傞僨僶僀僗偲偟偰丄Huawei Mate 10 Pro, Samsong S8 (Exynos), Huawei P10 偑捛壛偝傟偨丅P10攦偭偨偺惓夝偩偭偨偐側丅偁偲偼嬤乆偲塡偝傟傞Android 8.0 傊偺傾僢僾僨乕僩 (嶲徠) 傪懸偮偩偗丅
...................................................................................................................................
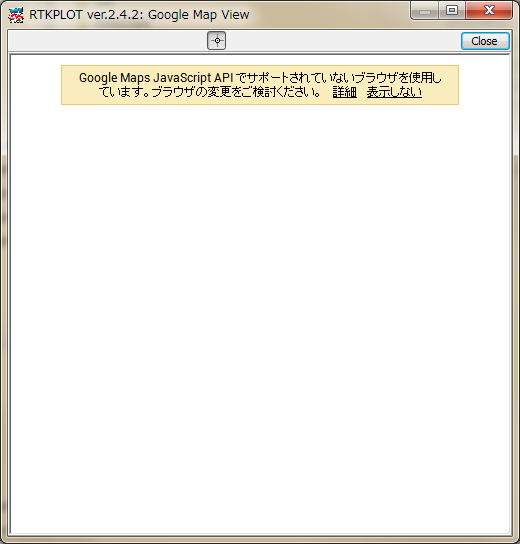
RTKPLOT偺GMView偑偄偮偺娫偵偐巊偊側偔側偭偰偄傞審丄Windows偺儗僕僗僩儕傪偄偠傞偲暅媽偝偣傞偙偲偑偱偒傞偙偲偑暘偐偭偨丅曽朄偼埲壓偺捠傝丅側偍丄Windows 7 64bit偱妋擣偟偰偍傝丄懠偺娐嫬偱偼惓忢摦嶌偟側偄偐傕偟傟側偄丅
(1) Windows儊僯儏乕偺乽僾儘僌儔儉偲僼傽僀儖偺専嶕乿憢偵"regedit"偲偄傟偰儗僕僗僩儕僄僨傿僞乕傪婲摦丅
(2) 儗僕僗僩儕僉乕 HKEY_LOCAL_MACHINE - SOFTWARE
- Wow6432Node - Microsoft - Internet Explorer
- MAIN - FeatureControl - FEATURE_BROWSER_EMULATION
傪慖戰丅
(3) 儊僯儏乕 [曇廤] - [怴婯] - [DWORD (32價僢僩)
抣] 傪幚峴偟偰丄儗僕僗僩儕抣傪捛壛丅
(4) 捛壛偟偨儗僕僗僩儕抣偺丄柤慜偲偟偰 "rtkplot.exe"丄僨乕僞偲偟偰 00001f4000002af8 (12/7掶惓) (16恑) 傑偨偼11000 (10恑) 傪擖椡丅
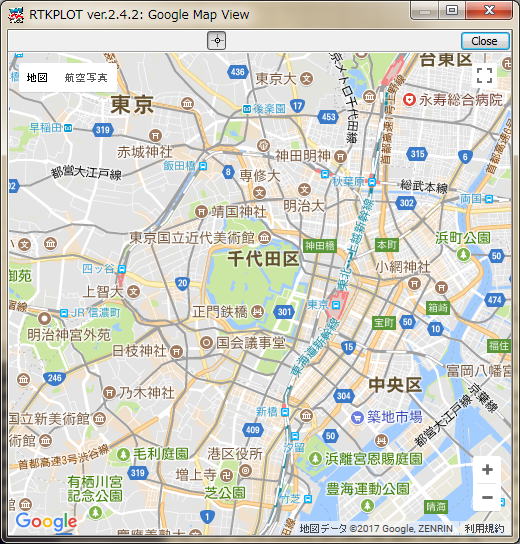
RTKPLOT偺GMView偵杽傔崬傑傟偨VCL偺WebBrowser僐儞億乕僱儞僩偼丄Win32偺WebBrowser僐儞僩儘乕儖傪屇傃弌偟偰偍傝丄偙偺僐儞僩儘乕儖偑僨僼僅儖僩偱IE 7偲偟偰摦嶌偡傞偨傔丄Google Maps API偺峏怴偵敽偄僒億乕僩奜僽儔僂僓偲側偭偰偟傑偭偨傜偟偄丅埲忋偺儗僕僗僩儕傪憖嶌偡傞偙偲偵傛傝丄RTKPLOT偵杽傔崬傑傟偨WebBrowser僐儞億乕僱儞僩傪IE 11偲偟偰摦嶌偝偣傞偙偲偑偱偒傞丅
-------------------------------------
QZSS奣嫷: 2017/12/5 5:35 UTC崰 QZS-3 L6怣崋嵞奐 (PRN199, 209)丅
-------------------------------------
QZSS奣嫷: 2017/12/5 1:40 UTC崰 QZS-3 L6怣崋掆巭 (PRN199, 209)丅
...................................................................................................................................
QZSS奣嫷: 2017/12/3 8:09 UTC崰 QZS-2 (PRN194) 傾儔乕僩OFF丄8:26 UTC崰 QZS-1 (PRN193) 傾儔乕僩OFF丅僒乕價僗掆巭婜娫偼40帪娫56暘 (QZS-1) 偲40帪娫37暘 (QZS-2) 丅QZS-3, 4 (PRN199, 195) 偼宲懕偟偰傾儔乕僩ON丅QZS-3偼懪偪忋偘屻106擔栚側偺偱丄QZS-2偺椺傪尒傞偲偦傠偦傠傾儔乕僩偑夝彍偝傟傞偼偢偱偁傞丅(L1C/A)
QZSS擔掱 (12/3尰嵼, UTC)丗
(1) QZS-2: 懪偪忋偘 6/1, 弶L1C/A怣崋 6/26
(+25擔), 弶L6怣崋 6/27 (+26擔), 弶LNAV 7/7
(+36擔), 傾儔乕僩夝彍/帋尡僒乕價僗奐巒 9/16
(+107擔)丅
(2) QZS-3: 懪偪忋偘 8/19, 弶L1C/A怣崋 9/11
(+23擔), 弶L6怣崋 10/3 (+45擔), 弶LNAV 10/4
(+46擔), 傾儔乕僩夝彍/帋尡僒乕價僗奐巒 枹丅
(3) QZS-4: 懪偪忋偘 10/9, 弶L1C/A怣崋 11/1
(+23擔), 弶L6怣崋 11/24 (+46擔), 弶LNAV 11/24
(+46擔), 傾儔乕僩夝彍/帋尡僒乕價僗奐巒 枹丅
...................................................................................................................................
RTKPLOT偺Google Map (GM) View偑偄偮偺娫偵偐巊偊側偔側偭偰偄傞丅偙傟側傫偲偐側傜側偄偺偐丅
-------------------------------------
QZSS奣嫷: 2017/12/2 2:22 UTC尰嵼 慡塹惎傾儔乕僩ON (嶲徠, AF=alert flag)丅NAQU偵傛傞偲丄QZS-1, 2 (PRN193, 194) 偵丄2017/12/1 15:32 UTC偐傜壗傜偐偺忈奞偑敪惗偟偰偄傞偺偱偼側偄偐偲悇嶡偝傟傞丅
...................................................................................................................................
堏摦偺偛曬崘丅
12寧1擔晅偱丄搶嫗奀梞戝妛偵暅怑偟傑偟偨 (奀帠僔僗僥儉岺妛晹栧 嶻妛姱楢実尋媶堳丄寭柋)丅崱屻偲傕丄戝妛偵偍偗傞尋媶妶摦偵懳偡傞偛巟墖傪傛傠偟偔偍婅偄偄偨偟傑偡丅
...................................................................................................................................
| Home | by T.Takasu |
{kind=link}